ABSTRACT Il Rainerum Robotics, gruppo composto da studenti e docenti dell'omonimo Liceo, si occupa da
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

ABSTRACT
Il Rainerum Robotics, gruppo composto da studenti e docenti dell’omonimo Liceo, si occupa da
quattordici anni di sviluppare progetti avanzati di robotica. Negli ultimi due anni ha lavorato sul
raccordo tra la robotica e i servizi informatici.
Nel 2014 il gruppo aveva presentato due quadricotteri automatici utilizzabili per riprese. Questa
volta il nuovo team presenta una APP che permette di interagire con ricostruzioni 3D di esterni e
interni.
I droni hanno costituito uno degli strumenti per acquisire immagini e dati per effettuare le
ricostruzioni.
Si è partiti da una domanda legata al turismo nella nostra provincia e in particolare al valore
culturale dei numerosi castelli disseminati sul territorio.
Ci si è chiesti:
come si potrebbero invogliare i giovani a visitare i castelli dell'Alto Adige?
Da cui è conseguita la domanda più specifica:
come rendere appetibile all'uomo moderno la visita a edifici di epoca medioevale?
Con questo progetto, infatti, si intende sperimentare e mettere a punto tecnologie innovative per
innescare forte interesse relativamente a siti storico-culturali di rilievo. Il prodotto finale vuole
essere un’applicazione interattiva multipiattaforma, user-friendly, gratuita che permetterà agli utenti
non solo di accostarsi e visitare virtualmente i siti in questione, ma anche di accedere a molteplici
contenuti multimediali dal proprio dispositivo mobile durante il tour virtuale della location. Per
questo sono state testate tecnologie per la cattura di immagini georeferenziate, riprese panoramiche,
ricostruzione in 3D tramite sensoristica all’avanguardia sui castelli dell’Alto Adige. Alcuni
dispositivi sono stati collocati su velivoli ad ala mobile e fissa, automatizzati e sperimentati
appositamente per questo scopo. E' stata sviluppata, soprattutto, la tecnologia per l’utilizzo di
sensori specializzati per la ricostruzione in 3D, di cui uno di ultima generazione e la creazione di
file utilizzabili sia per visualizzazione in 3D che per l’eventuale stampa di parti dell’edificio o di
elementi di interesse.
Risulta interessante il confronto fra tre tecniche differenti per l'acquisizione e ricostruzione 3D.
Si è partiti da un'idea lasciata in eredità dai predecessori di RRobotics che prevede l'acquisizione di
immagini in stereoscopia, che una volta implementata è stata confrontata con tecniche più moderne
che prevedono l'utilizzo di software per la composizione di immagini georeferenziate. E' stata
sperimentata con successo l'acquisizione e ricostruzione tramite Kinect e si sta sperimentando il
nuovo sensore "Structure".
Per cui si giunge, dopo appositi test, a individuare la tecnica più efficace e praticabile a seconda
della situazione.
L'APP presenta notevoli potenzialità di sviluppo che verranno in parte implementate
nell'immediatissimo futuro.
L'intenzione rimane comunque quella di invogliare il visitatore virtuale a divenire un reale turista
che apprezzi dal vivo i siti di interesse della nostra provincia.
Per questo lo strumento fornisce "assaggi" di ciò che si potrebbe apprezzare a pieno solamente con
una visita "sul campo". Si propone di renderla visibile e scaricabile su siti specializzati in
promozione turistica locali e internazionali visti i contenuti in tre lingue.
1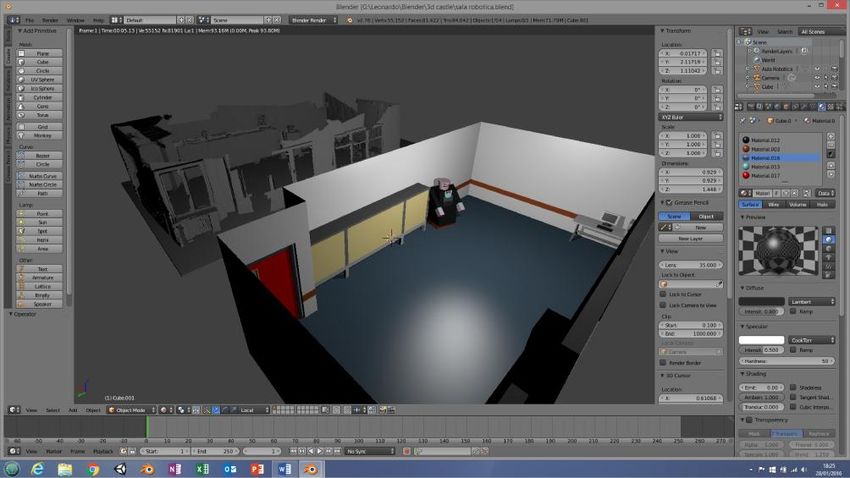
INDICE
1 INFORMAZIONI GENERALI................................................................................................................................ 3
1.1 UN PO’ DI STORIA: IL RAINERUM ROBOTICS DAL 2002-2016................................................................................. 3
1.2 COME È NATO IL PROGETTO “INTO 3D CASTLE”?................................................................................................... 3
1.3 LO STATO DELL’ARTE............................................................................................................................................ 3
2 GRUPPI DI LAVORO .............................................................................................................................................. 5
3 REALIZZAZIONE DI UNA APP SPECIFICA ..................................................................................................... 6
3.1 INTRODUZIONE ...................................................................................................................................................... 6
3.2 STRUTTURA E ORGANIZZAZIONE ........................................................................................................................... 7
3.3 PROGRAMMAZIONE ............................................................................................................................................... 7
4 TECNICHE DI RICOSTRUZIONE IN 3D ............................................................................................................ 8
4.1 VISIONE STEREOSCOPICA ...................................................................................................................................... 8
4.2 UTILIZZO DEL KINECT ........................................................................................................................................... 8
4.3 COMPOSIZIONE FOTO............................................................................................................................................. 9
4.4 CONFRONTO .......................................................................................................................................................... 9
5 SOFTWARE DI AGGIUSTAMENTO.................................................................................................................... 9
5.1 STL E UNITY .......................................................................................................................................................... 9
5.2 PROCESSO DI RIELABORAZIONE DELLE MESH ...................................................................................................... 10
6 TECNICHE DI RIPRESA ...................................................................................................................................... 11
6.1 MULTIROTORE .................................................................................................................................................... 11
6.2 GIMBAL ............................................................................................................................................................... 12
6.3 TESTING PER IL CONFRONTO TRA VRBRAIN VS APM2.5 ..................................................................................... 12
6.4 ALA FISSA ........................................................................................................................................................... 13
6.5 REGOLAMENTO ENAC ......................................................................................................................................... 14
7 RISULTATI RAGGIUNTI..................................................................................................................................... 15
8 WORK IN PROGRESS .......................................................................................................................................... 15
8.1 STRUCTURE ......................................................................................................................................................... 15
8.2 TUTTALA ............................................................................................................................................................. 15
8.3 APP .................................................................................................................................................................... 16
9 CONCLUSIONI GENERALI ................................................................................................................................ 16
10 RINGRAZIAMENTI .............................................................................................................................................. 16
BIBLIOGRAFIA E SITOGRAFIA............................................................................................................................... 16
2
1 INFORMAZIONI GENERALI
1.1 Un po’ di storia: il Rainerum Robotics dal 2002-2016
La nostra scuola, il Liceo Scientifico Salesiani Rainerum nel 2001 ha stabilito di riorganizzare
l’orario in modo tale che due ore del monte ore settimanale siano destinate a un laboratorio
scientifico che ogni studente è tenuto a scegliere tra cinque proposte. Questi laboratori
approfondiscono in maniera sperimentale alcuni aspetti della ricerca scientifica e tecnologica. Uno
di questi è di Intelligenza Artificiale.
Nel 2002 alcuni studenti e docenti hanno fondato il gruppo Rainerum Robotics che tuttora si occupa
di realizzare progetti nell’ambito dell’Intelligenza Artificiale cercando di inserirvi ogni volta alcuni
tratti originali. Il 7 Ottobre 2003 presso l’EURAC di Bolzano veniva presentato al pubblico
Debobber I, il primo robot di Rainerum Robotics.
Negli anni successivi il gruppo cogestito da studenti e docenti si è ampliato, tuttora gli studenti più
esperti coordinano i progetti e si occupano di trasmettere le proprie competenze ai giovani appena
entrati.
Nel 2010 Eu.R.Ex, un sistema di robot per la mappatura di un ambiente che si ispira alle strategie
di cooperazione di insetti sociali ha partecipato alla finale del Concorso “Giovani Ricercatori
Cercansi” indetto dall’EURAC di Bolzano e alla finale dello “European Union Contest for Young
Scientists” tenutasi a Lisbona.
Nel 2012 il gruppo ha partecipato alla finale di “Giovani Ricercatori Cercansi” con il progetto
“HuFriend” che affrontava l’assai attuale problema della comunicazione immediata uomo-robot.
Da questo progetto nel 2014 era nata l’idea di realizzare uno sciame di robot volanti di facile
utilizzo e versatili, che ha dato l’avvio al progetto Julè.
Ricchi dell’esperienza dei nostri predecessori, abbiamo pensato come poter sfruttare questi veicoli
per ulteriori sviluppi e applicazioni fino a cercare di realizzare un’applicazione interattiva che
consenta agli utenti non solo di accostarsi e visitare virtualmente i siti in questione, ma anche di
accedere a molteplici contenuti multimediali dal proprio dispositivo mobile durante il tour virtuale
della location.
1.2 Come è nato il progetto “Into 3D Castle”?
Il gruppo Rainerum Robotics è composto da ragazzi che si aggregano spontaneamente e lavorano
principalmente al di fuori dell’orario scolastico, i ragazzi più esperti presenti nel gruppo da qualche
anno trasmettono le proprie competenze ai neoentrati tramite tutoraggio peer to peer e
affiancamento durante le sessioni di lavoro. Per questo il gruppo può far tesoro di tutta l’esperienza
acquisita in 14 anni di progetti.
Negli ultimi anni abbiamo osservato un sempre maggiore utilizzo di droni volanti dovuto alla allo
sviluppo di piattaforme che permettono anche a utenti non esperti di governare strutture complesse.
Abbiamo quindi pensato di sfruttare le competenze trasmesse al gruppo con Julè integrandole con
quelle che i nuovi componenti si sono formati in itinere per creare una app che permetta di visitare
virtualmente una area di rilievo, che può essere un castello o delle rovine di particolare interesse,
ricostruite mediante scansione in 3D con tecnologie in alcuni casi inoovative.
Per la ricostruzione 3D abbiamo confrontato fra loro vari software, uno realizzato da un nostro
predecessore e integrato durante questo progetto, che consegue dalla scelta adottata a monte di
utilizzare 2 telecamere per la ricostruzione stereoscopica dell’immagine, un altro che si basa
sulll’unione di molteplici nuvole di punti per la realizzazione di immagini utilizzando come sensore
il kinect.
1.3 Lo stato dell’arte
Oggigiorno le applicazioni sul turismo sono sempre più diffuse nel nostro paese.
3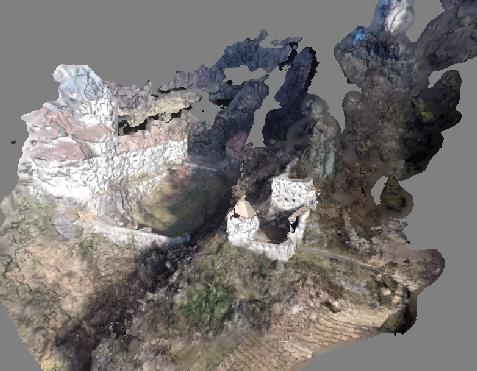
Esistono varie tipologie di applicazioni che forniscono una panoramica generale delle principali
attrazioni turistiche italiane. Le più utilizzate sono quelle riguardanti castelli, musei e monumenti.
Queste applicazioni, improntate alla semplicità per ottenere immediatezza, sono utilizzate per
ricevere informazioni utili sulla posizione, la storia, le informazioni generali e una galleria
fotografica di qualsiasi tipo di attrazione.
In commercio risultano alcune applicazioni per la visualizzazione di edifici in 3D, L’applicazione
disponibile a tutti più diffusa è Google Earth, dato che è utilizzabile su qualsiasi SO (sistema
operativo), è stata programmata in modo che si molto leggera e fluida.
Alcune idee rivoluzionarie sono state applicate in comuni italiani della Valle D’Aosta e hanno
riscosso un gran successo. La "Fulkron", di Cernusco sul Naviglio, un'azienda privata non
valdostana che ha ritenuto interessante realizzare prodotti dedicati al turismo nella regione, ha
ideato una App, chiamata VdaCastle, in grado di far visualizzare esclusivamente foto, indicazioni
per le visite e la storia di ben quindici castelli valdostani.
Sempre la Fulkron ha creato un calendario dinamico (Vda3d) che viene utilizzato per presentare
eventi e manifestazioni organizzate in Valle d'Aosta suddividendole in tre "dimensioni", novità,
relax e divertimento, che si auto-aggiorna e, con l'aiuto del GPS presente negli smartphone, propone
prima gli eventi più vicini.
Inoltre esistono delle applicazioni basate su panoramiche in grado di far visitare virtualmente un
museo o un’attrazione turistica. Applicazioni che invogliano il turista a visitare il museo e di
conseguenza la città.
Questa modalità viene tutt’ora utilizzata al Louvre di Parigi per visitare virtualmente ogni singola
stanza del museo ed è possibile visionare determinate opere d’arte zumando.
Foto 1: piano terra Louvre Foto 2: ala Museo Louvre
Al momento vi sono molte app che permetto la visualizzazione di una realtà virtuale, tra le più
conosciute ritroviamo la modalità streetview di Google Maps che permette la visione del mondo da
un punto di vista prospettico. Questa “finta” prospettiva viene realizzata tramite speciali
panoramiche sferiche ottenute con apposite fotocamere e software. Un'altra realtà virtuale molto
famosa tra i giovani è quella visibile attraverso lo speciale visore della Xbox ovvero l’OculusRift.
Questo visore permette di avere un’esperienza di gioco unica dando la possibilità al giocatore di
muovere la visuale con il semplice movimento della testa, e di conseguenza al giocatore sembrerà di
stare realmente nel mondo virtuale in cui è immerso. Apparecchi simili sono stati realizzati dalla
Samsung, HTC e perfino dalla Sony. L’azienda Google ha invece cerato un apparecchio di facile
reperibilità e di prezzo ridotto, stiamo parlando della Google Cardboard.Come si intuisce già dal
nome questo dispositivo è formato da un foglio di cartone ripiegato a forma di montatura per
maschera da sci, all’interno vi sono delle lenti che permetto una visuale distante dello schermo dello
Smartphone che va inserito nell’apposito vano. Questo dispositivo serve per lo più a visualizzare le
foto a 360 gradi fornite da Google Maps e, sebbene i materiali di questo apparecchio siano di basso
costo e di rapida usura, questo “visore” rimane un ottimo gadget da provare almeno una volta.
Passando ad un livello superiore vi sono i Microsoft Hololens, un visore innovativo che passa ad un
livello superiore alla realtà virtuale, quello della realtà aumentata, la sostanziale differenza è che la
realtà virtuale è una realtà del tutto nuova che non ha nulla a che fare con il mondo reale, la realtà
4
aumentata invece consiste nel far visualizzare oggetti “olografici”, visibili solo a chi indossa il
visore, all’interno di un contesto quale la realtà del mondo che ci circonda.
Stato dell’arte delle tecniche di ricostruzione e delle riprese in 3D
Attualmente le tecnologie più diffuse per la ricostruzione 3D sono quelle che utilizzano la
fotogrammetria. Tecnologia che si basa sulla intersezione di varie immagini catturate tramite
l'utilizzo dei satelliti, aereo-modelli (multirotore e tuttala) o immagini terrestri (tramite fotocamere
ad alta risoluzione), le quali generalmente vengono georeferenziate, ovvero associate a coordinate
GPS. Tramite software di assemblaggio delle immagini raccolte, ad esempio: FotoScan, Zephir,
Stereophoto Marker, si riescono ad ottenere modelli digitali tridimensionali di varie superfici,
modelli (texturizzati) ed immagini che presentano anche la terza dimensione.
Negli ultimi anni si sono sviluppate tecnologie che, tramite telecamere più avanzate, riescono a
ricreare scansioni tridimensionale in tempo reale grazie all'aggiunta di sensori, come quello ad
infrarossi, che permettono una precisione maggiore nell'individuazione del corpo interessato.
L'unico svantaggio di questa scansione “real time” è il limite delle dimensioni del soggetto della
scansione.
Oggi i mezzi per le scansioni tridimensionali sono perlopiù multirotori essendo versatili e facili da
pilotare. Grazie alla alta stabilità di questi velivoli si possono montare vari sensori e telecamere per
avere la massima risoluzione e precisione durante la scansione. Un altro dei vantaggi è che il
multirotore ha la possibilità di girare intorno al corpo interessato senza troppe complicazioni.
L'altra categoria dei velivoli utilizzati (per ora molto raramente) per la scansione tridimensionale
sono i tuttala, i quali vengono utilizzati per
panoramiche ad alte velocità per avere, ad esempio,
una ripresa totale dall'alto del corpo in questione.
I droni sono ormai largamente utilizzati per
riprendere dall'alto con inquadrature spettacolari
importanti eventi sportivi e culturali. Sempre più
spesso le immagini che vediamo in televisione sono
girate attraverso grandi droni, dal peso che talvolta Figura 1: ricostruzione in 3D delle rovine di Laimburg
supera i 40 chili che volano in luoghi altrimenti
irraggiungibili da un normale operatore. Tali droni sono equipaggiati con avanzate telecamere da
riprese che permettono di riprendere in modo stabile e preciso partite di calcio, gare di
automobilismo, eventi culturai e concerti. Questi droni sono molto più grandi di quelli utilizzati dal
nostro gruppo, e hanno spesso il doppio dei rotori presenti sul nostro, proprio per sollevare un peso
maggiore. I più grandi e comuni droni utilizzati per questi scopi sono gli optocotteri e gli
hexacotteri, rispettivamente dotati di otto e sei rotori. Anche in questo caso la regolamentazione
ENAC è molto rigida e obbliga i proprietari di tali mezzi a dotarli di paracadute, che rallenti la
caduta a sufficienza da evitare danni a persone, animali o cose. E' molto raro trovare dei tuttala che
effettuano riprese di questo tipo, proprio per via della loro eccessiva velocità e imprecisione.
2 GRUPPI DI LAVORO
Partendo da ricerche effettuate da tutto il gruppo RR, noi cinque abbiamo perseguito gli obbiettivi
introdotti in precedenza e per ottimizzare il lavoro ci siamo suddivisi in sottogruppi:
Gregorio Giovanazzi si è occupato di coordinare il progetto tenendone sotto controllo tutti gli
aspetti e ha migliorato il software per la ricostruzione in 3D ricercando anche software 3D adatti al
nostro scopo
5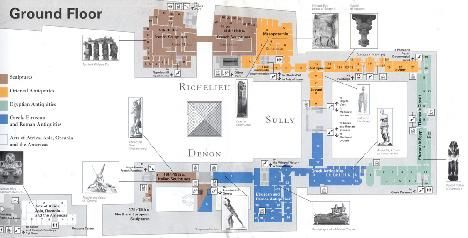
Manuel Leoni ha scansionato i vari locali e siti di interesse da inserire nell'app, aiutando Gregorio
alla ricostruzione in 3D.
Niccolò Bussi, Lorenzo De Noia e Michele Calvanese hanno lavorato alla riprogettazione dei
velivoli (quadricottero e tuttala) adattandoli ai nostri scopi di ricerca e al regolamento ENAC.
Inoltre si sono occupati della creazione dell’app, di una interfaccia user friendly e della ricerca dei
siti di maggior interesse.
Collaboratori:
Per realizzare questo progetto ci siamo basati anche su risultati raggiunti da nostri compagni di
Rainerum Robotics, molti dei quali ci hanno dato una mano per lavori che necessitavano della
presenza di più persone. Sarebbe ingiusto, quindi, non nominarli:
Jan Pizzuti e Leonardo Defrancesco hanno aiutato a progettare l'app e per la realizzazione del
video finale
Matthias Döcker ha collaborato nella costruzione e nella sperimentazione dei vari velivoli da noi
utilizzati.
Collaborazioni esterne.
Per crearci competenze in questi ultimi mesi stiamo interagendo con enti specializzati nei campi
della ricostruzione 3D, della realtà virtuale interattiva, dell'utilizzo di droni.
Alcuni di noi stanno seguendo un corso on line tenuto dall'Azienda Arte Amica per la realizzazione
di applicazioni per la navigazione interattiva in ambienti 3D,
Abbiamo collaborato con la Fondazione Museo Civico di Rovereto in particolare con esperti di
telerilevamento che ci hanno messo a disposizione le risorse del software Zephir e il loro know-how
sulle riprese da drone,
stiamo collaborando con Multirotor System di Bolzano per quel che riguarda i regolamenti ENAC
dal momento che vi fanno parte professionisti nel campo delle riprese con droni.
Per l'ingresso nei castelli stiamo interfacciandoci con le strutture museali che li gestiscono.
Visto che il lavoro procederà nei prossimi mesi ora che abbiamo messo a punto e testato le tecniche,
pensiamo di contattare direttamente la Ripartizione Beni Culturali della Provincia.
3 REALIZZAZIONE DI UNA APP SPECIFICA
3.1 Introduzione
L’intero progetto verte alla creazione di un’app che permetterà al turista, in particolare tra i 15 e i
40 anni, di avere un’esperienza virtuale all’interno di castelli altoatesini, visualizzarne percorsi di
interesse in 3D, interagendo per ottenere informazioni aggiuntive su opere e/o manufatti che vi si
trovano all’interno. L’app sarà disponibile per dispositivi mobili quali Android e IOS e verrà
realizzata con un software specifico per game-editing ovvero Unity-3D. La scelta di questo software
dipende soprattutto dal fatto che da questo si può esportare il progetto in svariati formati compatibili
ciascuno ad un diverso sistema operativo o console tra cui troviamo Windows, OS X, Android, IOS
e molti altri. Con Unity possiamo ricostruire un mondo virtuale con cui è possibile interagire, con
alcuni tools possiamo creare un terreno e modificarne la topologia oppure aggiungere vegetazione e
texture al fine di rendere più avvincente e realistica la ricostruzione. Per la ricostruzione del castello
è invece possibile importare file da Blender o da altri programmi di modellazione 3D.
6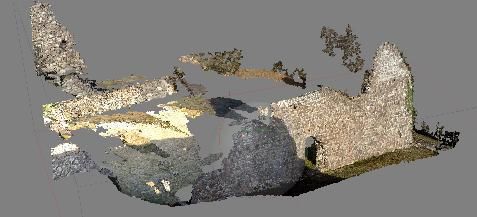
Figura 2: pagina iniziale dell'APP su uno smartphone
3.2 Struttura e organizzazione
La struttura della nostra app è molto semplice: vi è una UI iniziale dove l’utente può decidere se
accedere alla lista dei castelli visionabili o modificare le impostazioni di base. Questa, come anche
le altre User Interface, è stata creata tramite una grafica di sfondo realizzata con Photoshop alla
quale verranno aggiunti i pulsanti con i quali si può accedere alle diverse aree dell’applicazione. La
seconda UI contiene la lista completa dei castelli fin ora realizzati, scegliendone uno qualsiasi si
può accedere ad un’interfaccia che dà all’utente la possibilità di scegliere il tour da fare (esterno o
interno) e di visionare le specifiche principali del castello. Durante il tour esterno il turista può
ruotare la struttura per vederla da ogni punto di vista ma la visuale è ancorata al centro del castello
in modo da rendere più pratica e semplice la navigazione mantenendo il castello al centro della
schermata. Durante il tour interno invece vi è la possibilità di muoversi liberamente nelle stanze e di
interagire con oggetti di interesse come manufatti e opere d’arte. L’interazione con tali oggetti
permette all’utente di visionarne i dettagli e le informazioni principali quali la storia e l’autore, a
tale scopo si accederà ad una nuova scena dove vi sarà l’oggetto selezionato ricostruito
tridimensionalmente che è possibile ruotare al fine di ammirarne i dettagli.
3.3 Programmazione
L’app che andremo a realizzare sfrutterà sistemi di interazione dell’utente con un mondo virtuale,
questo concetto è lo stesso che ritroviamo in qualsiasi gioco multimediale indi per cui abbiamo
deciso di utilizzare un game-engine (motore di gioco) per realizzare la nostra app. La nostra scelta
è stata Unity 3D: un software open-source che ci permette di sviluppare app e giochi per moltissime
piattaforme, inoltre vi è la possibilità di creare mondi virtuali interattivi.
Unity ci dà la possibilità di programmare in due diversi linguaggi: C# e Java Script. Inoltre
all’interno del suddetto game-engine vi è un compilatore nativo del programma denominato
MonoDevenlop con il quale abbiamo programmato ogni script tra cui il “first person controller”
che permette all’utente di muoversi liberamente nello spazio virtuale, il “camera controller” che
permette il movimento della visuale vincolandola a ruotare attorno ad uno specifico punto ed
infine lo “switch scene” che permette di muoverci da una scena ad un’altra con un semplice
click.
7
4 TECNICHE DI RICOSTRUZIONE IN 3D
4.1 Visione stereoscopica
Per quanto riguarda l’ambito della ricostruzione
tridimensionale dell’ambiente lo scorso anno i nostri
predecessori hanno realizzato un programma per la
ricostruzione in 3D. E’ stato realizzato inglobando nel
codice anche librerie già esistenti, in modo da rendere le
basi del software più stabili. Noi, nel modificarlo in base
ai nostri obiettivi, abbiamo mantenuto la libreria
denominata OpenCV, la quale si occupa principalmente
di computer vision, ma fornisce anche semplici Figura 3: immagine stereoscopica
interfacce con le strutture matematiche complesse da
rappresentare in codice come ad esempio le matrici. Grazie a questa libreria siamo stati in grado di
catturare le immagini, per poi successivamente memorizzarle in matrici e compiere operazioni di
analisi e di modificazione su esse. Per ricostruire la profondità degli oggetti abbiamo mantenuto
l’algoritmo “disparità binoculare” implementato dai nostri predecessori che permette di
determinare la distanza degli oggetti dalla telecamera triangolando i punti corrispondenti di due
immagini aventi lo stesso soggetto. Il punto complesso di tutto questo processo è di corrispondere i
punti di un’immagine a quelli dell’altra. Per fare questo calibriamo simultaneamente le telecamere
usate al fine di poter generare una mappa delle disparità. La calibrazione avviene attraverso il
riconoscimento dei quadrati di un pattern a scacchiera di dimensioni conosciute. Conoscendo la
posizione nello spazio tridimensionale dei punti di intersezione tra i quadrati e la loro proiezione
sullo spazio bidimensionale delle telecamere è possibile stimare le proprietà intrinseche e i
coefficienti i distorsione delle loro lenti, nonché il vettore di traslazione e rotazione necessari per
equiparare i sistemi di riferimento di queste due telecamere. Stimati questi parametri si può quindi
procedere a modificare le immagini ottenute per porle sullo stesso piano, nel processo denominato
“rettificazione”, eseguito mediante apposite librerie che abbiamo impiegato sfruttandone particolari
funzioni.
4.2 Utilizzo del kinect
Abbiamo sperimentato l'utilizzo di altri metodi si scansione comparandoli con quello stereoscopico.
Sebbene il tipo di scansione 3D più utilizzato sia la scansione tramite foto, esso non è il più efficace
nel caso di oggetti o locali di piccole dimensioni è molto più efficace la scansione tramite il Kinect.
Il sensore originalmente è stato creato per scopi ludici, in particolare per riconoscere figure umane e
rilevarne i movimenti. Per questo è stato creato in modo che potesse rilevare la terza dimensione. Il
Kinect si divide in 3 componenti: una telecamera RGB (classica telecamera a colori), una
telecamera in bianco e nero ed una lampada infrarossi; ognuna di queste componenti ha un suo
compito: la lampada proietta, nello spazio davanti al Kinect, uno schema di punti che non sono
visibili ad occhio nudo, le due telecamere riescono ad
individuarli e quindi il sensore triangola ogni punto
usando le due telecamere ottenendo una nuvola di punti
che vengono colorati usando i colori rilevati dalla
telecamera RGB. Questa operazione viene ripetuta
diverse volte da inquadrature differenti ottenendo
diverse nuvole che vengono raggruppate tramite un
algoritmo che permette il riconoscimento delle forme
geometriche e quindi associa fra loro i punti che
compongono la stessa parte di oggetto, ottenendo in
questo modo una ricostruzione completa dell’oggetto. Figura 4: acquisizione immagini con il Kinect
8
4.3 Composizione foto
Negli ultimi anni la maggior parte delle
ricostruzioni tridimensionali sono ottenute
utilizzando il metodo della composizione foto,
questo metodo consiste nell’unione di una
notevole quantità di foto scattate da inquadrature
diverse tutto attorno al soggetto della scansione.
Le foto ottenute vengono quindi confrontate fra
loro individuando, tramite i colori e le linee, gli
elementi di sovrapposizione tra le immagini. Una
volta individuati i punti in comune si calcolano le
coordinate e l’angolo da cui sono state scattate le
foto rispetto all’oggetto, in questo modo si può
ricreare una nuvola di punti più fitta
Figura 5: ricostruzione 3D delle rovine di Laimburg aggiungendone ulteriori alla preesistente nuvola e
unendoli con una mesh. Per realizzare questa serie
di operazioni esistono vari software professionali tra cui Zephir, a cui abbiamo avuto accesso nella
struttura del Museo Civico di Rovereto, e Photoscan da noi utilizzato nella versione evaluation per
impratichirci.
4.4 Confronto
È importante notare che la scansione tramite Kinect è una versione evoluta e più precisa della
scansione stereoscopica poiché utilizza la stessa tecnica con l’aggiunta dell’infrarossi. Questo
divide la scelta del metodo di scansione in due tipi: la scansione tramite Kinect e la scansione a più
foto. Per prima cosa si nota come la scansione a più foto non ha un limite nelle dimensioni però
richiede molto più tempo sia per ottenere il materiale che per elaborare il materiale raccolto rispetto
alla scansione tramite Kinect, inoltre la scansione tramite Kinect non è influenzata ne dai giochi di
luce ne dalla mancanza di luce, a differenza della scansione per foto che in presenza di scarsa
illuminazione diventa completamente inutilizzabile. Per questo abbiamo scelto di scansionare gli
interni e gli oggetti utilizzando il Kinect, evitando problemi di illuminazione interna ai castelli. Per
il perimetro esterno, viste dimensioni e luminosità, applichiamo la scansione per foto.
Kinect, inoltre, non si presta per essere montato su un velivolo, ma nel prossimo futuro
sperimenteremo Structure, sensore analogo di ultima generazione, piccolo e leggero.
Figura 6: rovine di Laimburg, immagine reale Figura 7: rovine di Laimburg, ricostruzione 3D
5 SOFTWARE DI AGGIUSTAMENTO
5.1 Stl e Unity
Il frutto della scansione 3D è un file Stl con una miriade di facce di forma triangolare,
l’importazione di questo file all’interno di Unity comporterebbe un sostanziale appesantimento del
progetto che genererebbe lag e malfunzionamenti all’interno dell’applicazione, senza contare
9
l’eccessivo consumo di memoria volatile. La soluzione a questo problema è utilizzare dei software
di modellazione 3D al fine di rielaborare il materiale della ricostruzione facendolo diventare un
oggetto molto più pulito e leggero dal punto di vista della memoria utilizzata. Il software principale
che sfruttiamo è Blender, un software open-source a livello professionale, utilizzato molto da design
e 3D artists. Uno dei tanti pregi di questo programma è la possibilità di usare immagini reali come
texture degli oggetti, questa funzionalità si dimostra molto utile nel nostro caso perché ci basta
acquisire delle immagini delle texture presenti nel castello per poterlo riprodurre quanto più
fedelmente possibile alla realtà.
Figura 8: rielaborazione 3D delle immagini acquisite
5.2 Processo di rielaborazione delle mesh
La riproduzione di un castello con Blender è semplificata molto dalla possibilità di utilizzare la
scansione 3D come base da rielaborare. Difatti avere già un abbozzo su cui lavorare si rivela molto
utile nel caso di castelli molto grandi riducendo i tempi di elaborazione di una mesh (oggetto
tridimensionale in Blender) da 2 settimane se si parte da zero a poche ore se si utilizzano le
scansioni tridimensionali. Quest’enorme quantità di tempo risparmiato ci fa optare per la
realizzazione di un mondo virtuale piuttosto che delle immagini panoramiche a tutto tondo ormai
diffuse dal software della Google che è Maps, il quale permette lo Street view. Il processo di
rielaborazione del Stl si articola principalmente in tre fasi:
1) Nella prima fase importiamo il file Stl viene importato e ripulito da eventuali facce
generate erroneamente dai sensori di Scanning (Kinect o Fotocamera).
2) Nella seconda fase viene generata una seconda mesh che viene modellata sopra il file stl
in modo da ottenere una ricostruzione dettagliata del luogo scansionato, in questa fase
vengono corretti eventuali errori di scansione come ad esempio facce mancanti o
distorte.
3) La terza fase, chiamata anche fase di texturing, serve ad aggiungere alla mesh eventuali
texture.
Per impadronirci di questi strumenti ne abbiamo sperimentato l'uso per la scansione e ricostruzione
3D della nostra aula di robotica col risultato che compare in figura dove si compara una prima
ricostruzione con i dati grezzi e il prodotto dopo esser stato rielaborato con Blender.
10Siamo passati poi all'applicazione su esterni ed interni di castelli altoatesini.
6 TECNICHE DI RIPRESA
6.1 Multirotore
Ci siamo avventurati in questo progetto dopo aver valutato i mezzi disponibili.
Grazie all'esperienza acquisita e trasmessa dai nostri predecessori siamo stati in grado di
riassemblare e mettere in funzione due quadricotteri gemelli, progettando alcune parti su misura
per realizzarle con la nostra stampante 3D. Nella nostra "rivisitazione" del lavoro del gruppo di Julè
abbiamo pensato di testare elettroniche diverse per scegliere quella per noi più congeniale. Infatti il
primo è equipaggiato con una vrBrain 5.2 ed il secondo con una centralina Ardupilot 2.5.
Per i motivi che verrenno esposti in seguito il quadricottero con la scheda vrBrain viene usato
maggiormente, mentre il secondo multirotore funge da riserva. Entrambi i velivoli montano quattro
motori brushless da 920KV. Ciò significa che sono motori in grado di compiere 920 rotazioni al
minuto per ogni volt fornitogli. In termini aeromodellistici sono motori relativamente lenti, ma
essendo montati su un quadricottero sono pensati per sollevare pesi, e non per portarlo ad alta
velocità. Questa differenza si può notare principalmente dalle eliche che montano. Tali eliche sono
più angolate rispetto alla controparte per aeromodelli e sono progettate per funzionare a regimi più
bassi. L'alimentazione è fornita attraverso quattro ESC (modulatori di voltaggio) che regolano la
quantità di energia. I bracci sono collegati ad una base composta da fibra di vetro e metallo. Questa
combinazione conferisce resistenza e conduttibilità. Abbiamo a disposizione batterie per alimentare
i due droni di voltaggio 11.1V e un amperaggio compreso tra 5200 e 4000 mAh. Un amperaggio di
questo tipo ci permette di alimentare il quadricottero e il gimbal (il sistema per mantenere la
telecamera stabile e puntata) per circa quindici minuti. L'autonomia dipende anche da fattori esterni
quali vento, pressione atmosferica e quantità di variazioni di movimento che si fanno compiere al
drone. La centralina è alimentata in due modi diversi. Il quadricottero equipaggiato con Ardupilot
ha la centralina direttamente collegata all'alimentazione, mentre la scheda vrBrain necessita di un
BEC, un dispositivo che riduce il voltaggio della batteria e alimenta la centralina. La scheda è
dotata di accelerometri e un giroscopio
che le permettono di rilevare la sua
posizione rispetto all'orizzonte, in
modo da mantenersi orizzontale
durante il volo (regolando i motori per
conto suo, semplificando molto il
compito del pilota). La scheda è dotata
di due serie di porte: output e input.
Alle porte di output ci si collegano i
motori: il quadricottero invia dati per
farli accendere.
Figura 9: multirotore
Alle porte di input sono collegati i cavi
che portano segnali, come ad esempio i
cavi della ricetrasmittente e del GPS. L'antenna della telemetria è collegata allo stesso gruppo di
porte e trasmette a terra tutti i dati rilevati dal quadricottero. Attraverso un software apposito
(generalmente Mission Planner oppure APM Planner) è possibile interpretare i dati e dare al pilota
informazioni utili relative allo stato del quadrimotore. Tale software è anche usato per la
progettazione di missioni comandate attraverso il pilota automatico. Il pilota infatti, nelle missioni
più complesse fa affidamento su tale sistema, nel caso di problemi è però sempre pronto a
riprendere in modalità manuale il drone, portandolo a terra in modo sicuro. Ci sono varie modalità
di volo che possono essere impostate, le più usate sono:
11 Stabilaze, ovvero volo stabilizzato, in questa modalità il pilota ha la completa libertà sui
controlli, la centralina gestisce solo l'orientamento (mantiene orizzontale il drone se il
pilota non tocca i comandi)
Alt Hold, ovvero mantenimento della quota, permette al pilota di gestire il livello di quota
e non la potenza dei motori. Il sistema sfrutta un barometro integrato per mantenersi in
quota.
Loiter, è il sistema di geostabilizzazione attraverso il GPS. Il drone aggancia le coordinate
a cui si trova e si blocca in tale posizione. Il pilota ha il controllo su tutto, ma se molla i
comandi vedrà il drone bloccarsi a mezz'aria, dove lo aveva lasciato.
Le altre modalità di volo vengono usate di rado, quindi non verranno approfondite in questa
relazione.
6.2 Gimbal
Per migliorare le riprese utilizziamo un Gimbal che permette alla camera di mantenersi puntata su
oggetti che si muovono in modo rapido e repentino. Utilizziamo un sistema con possibilità di
movimento su tre assi, che gli permette di ruotare a 360° in tutte le direzioni. Questo sistema può
essere controllato con un radiocomando, in automatico o dal drone stesso. Al gimbal va collegata
una telecamera che permette di filmare, fare foto o scansioni. Nel nostro caso abbiamo utilizzato
una Go Pro Hero 4 che ci ha permesso di registrare video ad alta definizione con un incidenza
minima su peso e ingombro del velivolo. Tramite il software Go Pro Studio. apposito si può
programmare ed impostare questo eccellente apparecchio. Attraverso il software è possibile tarare
gli accelerometri e impostare diversi settaggi di funzionamento. Nel nostro caso il pilota del drone è
affiancato da un gimbalista che si occupa di direzionare la telecamera verso il bersaglio. Tale lavoro
cooperativo permette di riprendere nel dettaglio alcuni particolari di un oggetto senza dover
distrarre il pilota. Questo sistema può essere montato su qualsiasi drone in grado di sorreggerlo, ci
sono esempi di gimbal montati su elicotteri, aerei e addirittura rover. Ci sono varie tipologie di
stabilizzatori di ripresa, principalmente si dividono in base agli assi di movimento di cui sono
dotati. Tre assi di rotazione rappresenta il top di gamma, nonché un eccellente compromesso tra
costi ed efficienza. Sono tuttavia disponibili sul mercato gimbal composti da quattro assi.
6.3 Testing per il confronto tra VrBrain vs APM2.5
La decisione di utilizzare come quadricottero principale quello equipaggiato con VrBrain non è stata
casuale. Abbiamo voluto confrontare le informazioni date dal produttore e leggere le recensioni
scritte da numerosi utilizzatori di tali schede per capire quale di queste fosse davvero la migliore.
Dopo numerose ricerche è emerso che entrambe le schede presentassero pregi e difetti su
determinati aspetti, ad esempio, la scheda APM è più piccola e leggera della scheda VrBrain, che
però è a sua volta più reattiva grazie al processore più potente. Abbiamo quindi compreso che il
modo migliore per decretare quale di queste fosse la scheda migliore fosse di testarle entrambe e
scoprire vantaggi e svantaggi di entrambe. Essendo già in possesso della scheda APM abbiamo
deciso di acquistare la VrBrain della ditta italiana Virtual Robotix. Avendo entrambi i quadricotteri
operativi abbiamo effettuato dei test di stabilità e agilità fino ad ottenere sufficienti dati per un
confronto oggettivo. Come indicato dai dati del produttore, la VrBrain, con i suoi 168 Mhz di
processore è molto più reattiva e prestante della centralina APM. La centralina APM si è però
mostrata più semplice, pratica e compatta durante l'assemblaggio del quadricottero (le porte di input
e output sono indicate più chiaramente). Per quanto riguarda il peso e la memoria della scheda
entrambe se la cavano egregiamente e le differenze non si riescono a notare in volo. E' tuttavia
necessario precisare che esiste una terza scheda, che non possediamo, con le prestazioni di VrBrain
e la praticità di APM. Si tratta di Pixhawk, la scheda di PX4 ad alte prestazioni, compatta e
semplice da usare. A tutti gli effetti questa scheda rappresenta il top di gamma per chi ha intenzione
12di realizzare droni in grado di volare autonomamente. Non abbiamo purtroppo potuto acquistare
questa scheda per via del budget limitato che avevamo a disposizione, abbiamo però intenzione di
procuracene una per sostituire l'ormai danneggiata APM.
VrBrain APM 2.5
Vantaggi Svantaggi Vantaggi Svantaggi
Maggiore reattività Disposizione degli Compattezza Scarsa resistenza agli
input urti
Compattezza Dimensioni Compatibilità firmware Facile usura delle porte
componenti elettronici
Sensori molto sensibili Peso Cablaggi bene indicati
Prezzo Capienza della RAM
6.4 Ala fissa
Un altro elemento che ha differenziato fortemente il nostro uso si velivoli rispetto al gruppo di Julè
è stata la scelta per ora poco praticata di adottare dei velivoli ad ala fissa per effettuare riprese.
Abbiamo riscontrato la necessità di poter sorvolare grandi edifici in tempi brevi, effettuando magari
più passaggi. I velivoli di questo tipo possono inoltre non recare intelligenza a bordo (necessaria per
i multirotore) per cui essere classificabili come aeromodelli semplificando dal punto di vista legale
l'utilizzo. Abbiamo deciso quindi di costruire due tuttala di dimensioni differenti.
Il tuttala (conosciuto anche con il nome di aeromobile ad ala a delta o “blended wing aircraft”) è
uno specifico tipo di aereo. A differenza dei tradizionali aerei, che come caratteristiche principali
presentano una fusoliera, due ali, un timone di coda e un timone di profondità, i tuttala in genere
non hanno la fusoliera e le due ali diventano un'unica lunga ala. Nel nostro caso specifico i 2 tuttala
sono dotati di winglets posizionati sulle estremità alari. Le winglets servono ad aumentare le
prestazioni di volo, permettendo all'aereo di raggiungere velocità leggermente maggiori grazie al
fatto che riducono l'intensità dei vortici di estremità. Parlando di superfici di controllo, usualmente
gli aerei tradizionali presentano alettoni (posizionati sulle ali, servono a rollare l'aereo, ovvero
inclinarlo a destra e sinistra), timone di profondità (serve a far beccheggiare l'aereo, ovvero
inclinarlo verso l'alto o verso il basso), timone (per far imbardare l'aereo, ovvero fargli eseguire una
rotazione lungo un'asse verticale) e flap, Nel nostro caso invece sono presenti solamente due
superfici di controllo, ovvero due alettoni. Questi, a differenza degli alettoni installati su un normale
aereo, non servono solamente per virare sfruttando il rollio, bensì svolgono anche la funzione del
timone di profondità, controllando quindi il beccheggio. Nella nostra flotta abbiamo due tuttala, uno
piccolo e uno grande. Quello piccolo è completamente funzionante. È dotato di una ricevente che
comunica con il telecomando, il quale invia segnali al regolatore e ai due servomotori che
controllano i movimenti degli alettoni. Il regolatore è a sua volta collegato al motore brushless. Ad
alimentare il tutto si utilizza una batteria da 11,1V che distribuisce da 4000 a 5200 mA/h. Abbiamo
anche costruito un carrello, che permette di effettuare decolli e atterraggi rullando sul terreno.
L'impostazione è di tipo triciclico, ovvero sono presenti un carrello anteriore con una singola ruota
posizionata al centro e due carrelli posteriori (principali) posizionati lateralmente. Le ruote hanno
gomme che aiutano ad ammortizzare il tutto durante i rullaggi e i touchdown negli atterraggi. Sotto
all'ala, al centro, è posizionata una telecamera che riprende verso il basso. Con questa è possibile
effettuare riprese delle aree dei castelli dall'alto. Il tuttala più grande (1,40 m di apertura alare) è
molto simile al piccolo di 80 cm di apertura alare.
13Figura 10: Tuttala
Quadricottero vs Tuttala
Dopo le nostre sperimentazioni abbiamo potuto distinguere le situazioni in cui è utile un tipo di
velivolo piuttosto che l'altro.
Per il nostro progetto avevamo la necessità di sorvolare a bassa quota e con precisione un castello
medievale filmando da varie angolazioni. Il nostro gruppo aveva ormai guadagnato una certa
dimestichezza con l'utilizzo dei quadricotteri, ma avendo a disposizione due tuttala abbiamo deciso
di puntare sul loro sviluppo, sempre affiancati dagli ormai collaudati quadrimotori. A questo punto
abbiamo dovuto ideare la tecnica migliore per la scansione attraverso il nostro velivolo. Il problema
risiedeva nel diverso modo di volare di quest'ultimo, esso infatti, a differenza del quadricottero vola
sfruttando la portanza generata dell'ala, che viene portata ad alta velocità per mezzo di un rotore.
Per il quadricottero si usa generalmente un sistema di scansione a reticolo, che prevede il passaggio
attraveso uno schema a segmenti paralleli a distanza costante del drone, con la telecamera puntata in
basso. In alternativa è possibile creare un poligono attorno all'oggetto da scansionare, e sempre
attraverso il pilota automatico far volare il drone lungo tale perimetro. Con un quadricottero tutto
ciò è relativamente semlice, infatti esso è in grado di stazionare a mezz'aria per il tempo necessario
alla ripresa, e avvicinarsi lentamente e con precisione a qualsiasi edificio. Per il tuttala tutto ciò è
impossibile e per questo abbiamo studiato un diverso sistema di ripresa, che consiste in rapidi
passaggi in virata a fianco all'edificio. Il passaggio in virata è fondamentale per permettere alla
telecamera posta sotto la fusoliera di inquadrare l'edificio. Abbiamo pensato di testare entrambe le
tecniche su due siti differenti per poi comparare i risultati. Dalle nostre scansioni abbiamo notato
che il quadricottero è straordinariamente preciso nel suo lavoro, sia durante il volo manuale che
quello automatico, tutto questo a discapito della velocità. Il tuttala è invece molto rapido ed è in
grado di riprendere aree molto vaste in poco tempo, questo lo rende però poco preciso e spesso è
difficile inquadrare il bersaglio con precisione. Sarebbe possibile risolvere questo problema
montando un gimbal sul tuttala, rendendolo però eccessivamente pesante e goffo nei movimenti per
via del peso. Abbiamo quindi compreso il potenziale di entrambi i velivoli e abbiamo deciso di
utilizzarli entrambi sui siti da noi scansionati per massimizzare il rendimento. In questo modo sarà
possibile scansionare vaste aree riprendendo poi nel dettaglio le parti di maggiore interesse.
6.5 Regolamento Enac
Il volo dei droni al giorno d'oggi è strettamente regolamentato, al fine di garantire la sicurezza di
cose, animali e persone per conservare il fascino sicuro di questi mezzi. L'ente che si occupa della
realizzazione dei protocolli di sicurezza e di concedere i permessi per l'utilizzo di droni e
aeromodelli è l'ENAC, ovvero Ente Nazionale Aviazione Civile. La possibilità di far volare droni e
aeromodelli dipende dalla sezione di mezzi alla quale appartengono. E' intanto opportuno precisare
la differenza tra drone e aeromodello. Un drone è un velivolo sospinto attraverso un propulsore che
è in grado di volare in modo autonomo o che necessita di un certo grado di autonomia. Un
aeromodello è invece in ogni istante controllato interamente dal pilota. Nel nostro caso il pilota è
14sempre presente, tuttavia il quadricottero sarebbe in grado di volare in completa autonomia. Nel
nostro caso per uso non professionale dei nostri droni e aeromodelli non è necessario alcun
permesso da parte dell'ENAC per volare se essi si trovano in un luogo non abitato, senza persone e
volando sempre ad almeno 350 metri dall'abitazione più vicina al di fuori della Air Traffic Zone.
Non è inoltre possibile superare la quota di 70 metri senza permessi speciali ed è severamente
vietato invadere gli spazi aerei riservati di aeroporti, eliporti o basi militari. Per tanto abbiamo
selezionato location distanti da centri abitati e con eccellente visibilità del volo dell'aeromodello.
7 RISULTATI RAGGIUNTI
Attualmente, il 28 gennaio 2016, lo stato di avanzamento del nostro progetto è il seguente:
l'interfaccia della nostra APP supporta l'interazione con l'utente per la scelta del castello e
del tipo di servizio (navigazione in 3D interna, tour panoramico esterno ecc...),
abbiamo sperimentato con successo le tecniche di scansione e ricostruzione 3D per interni
ed esterni su almeno tre tipologie di castello: Fortificazione di grandi dimensioni e isolata,
ruderi, edificio inserito nel centro cittadino (senza l'utilizzo di droni),
l'utente può interagire con oggetti in 3D ed effettuare tour virtuali accedendo a informazioni
aggiuntive tramite tap su elementi presenti,
l'utente accede a immagini panoramiche di interni ed esterni,
gli strumenti hardware e software che abbiamo messo a punto ci permettono di acquisire
moli di dati e operare per creare tour virtuali su un numero elevato di siti di epoca
medioevale
8 WORK IN PROGRESS
Il sistema messo a punto presenta allo stato attuali enormi potenzialità di sviluppo e di utilizzo, per
cui nell'immediatissimo futuro vi apporteremo le seguenti integrazioni e migliorie.
8.1 Structure
Come spiegato prima, le nostre ricostruzioni 3D vengono effettuate con un sensore ormai datato: il
Kinect. Questo è sicuramente un ottimo sensore, ma ne esiste un altro molto più performante col
quale otterremo scansioni ancora migliori: Structure. Il sistema di funzionamento dei due è simile
ma non uguale. Il Kinect attraverso gli infrarossi crea dei punti sull'oggetto da scansionare e poi ne
verifica la distanza utilizzando un sistema che prevede l'utilizzo di due telecamere. Structure lavora
allo stesso modo, ma invece di utilizzare gli infrarossi per creare i punti, utilizza il laser. Un altro
grande pregio del sensore è che, a differenza del Kinect che per funzionare ha bisogno di 10V,
necessita solamente di 5V (presa USB). Inoltre per alimentare il Kinect c'è bisogno di una presa di
corrente, mentre per Structure basta avere una batteria. Per questo motivo abbiamo già in cantiere
l'idea di installare il nuovo sensore su velivoli per ricostruzioni aeree 3D. Per vari motivi quali la
disponibilità del prodotto in Italia e impedimenti burocratico-amministrativi non siamo riusciti
ancora a ottenerlo, ma in poco tempo ne entreremo in possesso.
8.2 Tuttala
Nel campo delle riprese aeree sfruttando i droni, il mezzo più utilizzato oggi è sicuramente il
multirotore. Questo per la sua affidabilità, maneggevolezza, stabilità e relativa semplicità di
utilizzo. La nostra idea è quella di iniziare a utilizzare anche altri tipi di velivoli ancora non
sperimentati nel campo; in particolare i tuttala. I 2 che possediamo risultano volare piuttosto
velocemente, per questo abbiamo intenzione di utilizzare questa caratteristica (che potrebbe essere
facilmente considerata come un problema) a nostro vantaggio. Abbiamo pensato a due modalità di
15utilizzo diverse. La prima è quella di installare una telecamera che punta verso il basso sotto all'ala.
In questo modo, volando al di sopra dei castelli è possibile ottenere le riprese necessarie a creare
un'immagine dell'area vista dall'alto. L'altra è quella di posizionare la telecamera sull'ala in modo
che punti di lato. Quando il velivolo rolla, un servomotore attaccato alla telecamera si muove
mantenendola perpendicolare al terreno. Con questa modalità le riprese potrebbero essere di tipo
panoramico, facendo volare l'aereo intorno ai siti d'epoca medioevale.
8.3 APP
Per quanto riguarda l'app pensiamo di aggiungere, in futuro, un sistema di rating dei castelli dove
gli utenti possono dare un voto (da una e cinque stelle) a ciò che hanno visto nel tour virtuale. Ci
sarà poi anche una classifica dei castelli in base al grado di apprezzamento da parte degli utenti.
Un'altra idea è quella di dare la possibilità ad alcuni proprietari dei castelli di apparire nella prima
pagina dell'applicazione in modo da aumentare la loro visibilità. In seguito all'uscita della
Cardboard di Google, abbiamo pensato di implementare in futuro la sua tecnologia all'interno della
nostra app dando la possibilità all'utente di apprezzare i castelli altoatesini a 360 gradi. Tutto questo
è effettuabile dal proprio smartphone supportato da Cardboard come visore di realtà virtuale.
9 CONCLUSIONI GENERALI
Il lavoro è stato effettuato da studenti di scuola secondaria con i tempi tecnici tipici della vita
scolastica. Sicuramente è perfettibile e ha notevoli potenzialità, di cui alcune probabilmente ci
sfuggono. Per ora abbiamo uno strumento i cui contenuti culturali andranno incrementati iniziando
collaborazioni anche con enti per la gestione dei beni culturali.
10 RINGRAZIAMENTI
– A Leonardo Defrancesco, Matthias Doecker e Jan Pizzuti per la preziosa collaborazione
– Ai professori Maddalena Angeli e Stefano Monfalcon
– A Sebastian Cincelli, per il prezioso sostegno
– Ai collaboratori Fabio Endrizzi, Francesco Finotti, Marco Nave, Multi Rotor System
– Al direttore dell'Istituto Maurizio Tisato.
BIBLIOGRAFIA E SITOGRAFIA
16Puoi anche leggere