Il camera-trapping come strumento per lo studio e la gestione della fauna nella parte sud-orientale del Parco Nazionale delle Dolomiti Bellunesi
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

Corso di Laurea magistrale in Scienze Ambientali Tesi di Laurea Il camera-trapping come strumento per lo studio e la gestione della fauna nella parte sud-orientale del Parco Nazionale delle Dolomiti Bellunesi Relatore Ch. Prof. Stefano Malavasi Correlatori Dott.ssa Arianna Spada Dott. Enrico Vettorazzo Laureando Tommaso Fabris Matricola 877831 Anno Accademico 2019 / 2020

INDICE 1. INTRODUZIONE .............................................................................................................................................. 1 1.1 Obiettivi del lavoro .................................................................................................................................. 1 1.2 Il camera-trapping nel monitoraggio faunistico ...................................................................................... 2 1.3 Struttura e componenti delle fototrappole odierne ............................................................................... 4 1.4 Il camera-trapping come tecnica poco invasiva ...................................................................................... 6 1.5 Il camera-trapping a confronto con altre tecniche di indagine ............................................................... 8 1.5.1 Il camera-trapping e il rilevamento dei segni di presenza................................................................ 8 1.5.2 Il camera-trapping e le trappole ....................................................................................................... 9 1.5.3 Il camera-trapping e la radiotelemetria ......................................................................................... 10 2. MATERIALI E METODI .................................................................................................................................. 12 2.1 L’area di studio ...................................................................................................................................... 12 2.2 Elaborazioni cartografiche e disegno di campionamento ..................................................................... 20 2.3 Protocollo metodologico ....................................................................................................................... 22 2.4 Catalogazione immagini ........................................................................................................................ 28 2.5 Elaborazione dati ................................................................................................................................... 29 3. RISULTATI..................................................................................................................................................... 32 4. DISCUSSIONE ............................................................................................................................................... 55 4.1 Analisi tecnica delle immagini ............................................................................................................... 55 4.2 Checklist................................................................................................................................................. 55 4.3 RAI.......................................................................................................................................................... 56 4.4 Naïve occupancy .................................................................................................................................... 58 4.5 Uso dell’habitat ..................................................................................................................................... 59 5. CONCLUSIONI .............................................................................................................................................. 61 6. ALLEGATI ...................................................................................................................................................... 62 6.1 Storia del camera-trapping .................................................................................................................... 62 6.2 Fattori economici e tempistiche del camera-trapping .......................................................................... 63 7. BIBLIOGRAFIA .............................................................................................................................................. 65

1. INTRODUZIONE 1.1 Obiettivi del lavoro Il Parco Nazionale delle Dolomiti Bellunesi (di seguito abbreviato PNDB) è un’area protetta, situata a nord della regione Veneto, istituita nel 1990 (Ministero dell’ambiente, 1990). In base alla Direttiva Habitat (92/43/CEE) e alla Direttiva Uccelli (79/409/CEE), l’area protetta viene individuata come Zona Speciale di Conservazione (ZSC) e Zona a Protezione Speciale (ZPS) ed è parte della Rete Natura 2000 (IT3230083). Istituita a protezione di habitat e specie della flora e della fauna selvatiche. Nel 2009, nove sistemi montuosi delle Dolomiti vengono dichiarati Patrimonio Mondiale dell’UNESCO. Tra questi rientra anche il PNDB, facendo parte del sistema montuoso delle Pale di San Martino - San Lucano - Dolomiti Bellunesi - Vette Feltrine. Questi riconoscimenti sottolineano l’importanza paesaggistica ed ecologica di quest’area, infatti il PNDB costituisce una delle regioni orientali delle Alpi meglio conservate e con la più ricca biodiversità. In esso sono presenti circa 1400 specie vegetali e le specie principali della fauna vertebrata alpina (Ente PNDB, 2020). Il PNDB, in quanto parco nazionale, ha tra le sue finalità la salvaguardia delle specie animali, vegetali e degli altri elementi naturali che rientrano nei suoi confini. Ciò viene indicato nella Legge Quadro sulle Aree Protette, lettera a) del comma 3, dell'articolo 1, L. 394/91. Studiare a fondo i vari habitat e le comunità che li abitano è il primo requisito per formulare delle strategie di conservazione efficaci. Per questo motivo di fondamentale importanza sono le attività di ricerca, indagine e monitoraggio portate avanti dal parco che vanno dalla botanica a tutta la fauna vertebrata e invertebrata. In particolare, studi approfonditi sono stati condotti su ungulati e galliformi, ma negli ultimi anni è stato possibile studiare più approfonditamente specie di mammiferi particolarmente elusive soprattutto grazie al camera-trapping. Per mezzo di questa tecnica, nel 2013 e nel 2014, è stato effettuato uno studio riguardo ai mustelidi e alla presenza del gatto selvatico europeo (Felis silvestris silvestris) nel parco. L’indagine ha permesso di incrementare le informazioni riguardo i mustelidi, prima derivanti principalmente da dati opportunistici, e ha permesso di verificare la presenza del gatto selvatico, specie mai segnalata prima nel parco (Spada et al., 2016). Allo stesso tempo l’utilizzo di questa tecnica oltre che per scopi di ricerca viene utilizzata all’interno del parco a fini divulgativi. Nel 2018 infatti il parco ha intrapreso un progetto intitolato “Il Sentiero dei Lupi” che ha lo scopo di documentare la ricolonizzazione naturale del lupo (Canis lupus lupus) nel parco. Nell’ambito di questo progetto è stato anche possibile registrare fortuitamente uno sciacallo dorato europeo 1

(Canis aureus moreoticus), specie segnalata poche volte nell’area protetta e con dati poco affidabili in precedenza (Il Sentiero dei Lupi, 2020). Considerato l’interesse del PNDB ad approfondire le conoscenze sulla fauna e constatati i risultati del camera-trapping in letteratura e nei primi studi effettuati nel parco, è stata intrapresa di recente un’indagine che si inserisce in questo contesto, ai fini di incrementare le conoscenze riguardo la fauna dell’area protetta, con particolare riferimento ai mammiferi e con un focus principale sui mesocarnivori, e fornire indicazioni che possano essere utili a scopo gestionale. L’indagine è stata condotta attraverso fototrappolaggio, tra giugno e settembre 2019, e si è concentrata nella porzione sud-orientale del PNDB. Tale area è stata scelta per la variabilità degli habitat che presenta e perché relativamente poco indagata anche in studi precedenti. Nell’area è possibile riconoscere tre subaree: il monte Serva, la valle dell’Ardo e la foresta di Cajada con i territori limitrofi. Queste si distinguono per la vegetazione che presentano. Il monte Serva è caratterizzato soprattutto da pascoli. La valle dell’Ardo presenta boschi a latifoglie, in particolare dell’associazione orno-ostrieto. La foresta di Cajada e i territori limitrofi sono costituiti soprattutto da boschi di latifoglie, in particolar modo faggete, e in parte di conifere. L’area indagata ha interessato una superficie di 21 km2 ed è stata suddivisa in una griglia di 21 celle di 1*1 km con una stazione di fototrappolaggio per ogni cella. Questa indagine intende fornire un contributo allo studio della biodiversità animale del PNDB, con particolare riferimento ai mammiferi, ampliando il bagaglio di conoscenze relative a tale componente faunistica, ai fini di fornire dati utili per la sua gestione e conservazione. I risultati ottenuti saranno comparati con indagini pregresse basate sul fototrappolaggio e costituiranno nuovo materiale di studio per il confronto con future possibili ricerche. I fattori che sono stati valutati in questo studio sono: - La ricchezza in specie per ogni punto indagato all’interno dell’area di studio e in base alle caratteristiche ambientali rilevate. - Gli indici di abbondanza relativi (RAI) giornalieri e orari per ogni specie. - La probabilità di rilevare ogni specie lungo la superficie dell’area di studio. - Alcune considerazioni riguardo l’uso dell’habitat delle specie rinvenute durante questa indagine. 1.2 Il camera-trapping nel monitoraggio faunistico Il camera-trapping (o fototrappolaggio) è uno strumento di indagine e monitoraggio della fauna che è stato ampiamente utilizzato negli ultimi decenni (Wearn and Glover-Kapfer, 2017). Esso consiste 2
nella disposizione, all’interno dell’area interessata, di fotocamere e videocamere automatiche anche dette camera-trap o fototrappole. Queste sono in grado di attivarsi al passaggio di un animale e di registrare una sua foto, o video, così da raccogliere di conseguenza, i dati che si possono trarre da una o più immagini. Questi dispositivi inoltre, sono in grado di registrare una serie di metadati al momento della cattura delle immagini. Tra questi è possibile trovare: l’ora, la data, la fase lunare e la temperatura del momento dello scatto. L’insieme di queste informazioni fa sì che il fototrappolaggio sia uno strumento adatto alle seguenti tipologie di studio: - Stesura di inventari faunistici: ovvero l’elenco delle specie presenti in una determinata area. Questo, oltre a dare una visione della composizione della comunità, permette di verificare la presenza di specie rare, in stati di conservazione particolari (Augugliaro et al., 2019) o specie invasive. - Studi di popolazione: questi possono prevedere stime di abbondanze relative, che possono essere calcolate tramite l’applicazione di indici, come l’indice dell’abbondanza relativa (RAI), oppure di abbondanze assolute che si possono ricavare ad esempio dal metodo di cattura e ricattura. Quest’ultimo può essere applicato solo sulle specie delle quali è possibile riconoscere i diversi individui e quindi di calcolare il loro tasso di ricattura da cui poi è possibile stimare le abbondanze. Infine, si può valutare la sex ratio (Maffei et al., 2005) oppure la struttura delle popolazioni, ma anche queste richiedono che la specie presenti dei tratti distintivi che rendano sesso ed età degli individui riconoscibili nelle immagini. - Studi di etologia: questi possono variare da studi di comportamento territoriale, stima dell’home range, e quindi stime di densità. Grazie all’ora e alla data presente nelle immagini si ha la possibilità di analizzare i ritmi di attività giornalieri o stagionali. Infine, è possibile fare osservazioni riguardo al comportamento sessuale o di ciclo di vita (Caravaggi et al., 2017). La quasi totalità degli studi effettuati tramite il camera-trapping ha come soggetto la fauna vertebrata. Le sue prime applicazioni hanno interessato mammiferi di ambiente terrestre, ma presto queste si sono estese anche agli uccelli (O’Connel et al., 2011). Alla fine degli anni Ottanta questo metodo è stato utilizzato in ambiente costiero, come per lo studio della foca monaca (Monachus monachus) di Hiby e Jeffery del 1987 e attualmente le sue applicazioni mostrano ulteriori sviluppi in habitat semiacquatici (Lerone et al., 2015). In tempi recenti si è persino costruito un sistema di fotocamera automatica subacquea (Williams et al., 2014). 3

I classici sensori a infrarossi PIR hanno difficoltà a rilevare organismi eterotermi come anfibi e rettili, e animali di piccole dimensioni, ad esempio micromammiferi, per questa ragione si sta cercando di affinare sistemi di rilevazione anche per essi (Hobbes et al., 2017). Dai lavori di revisione di Burton et al. del 2015 e di Wearn e Glover-Kapfer del 2019 è facile evincere che questa tecnica è ancora utilizzata per studiare principalmente la fauna teriologica. In primo luogo, i mammiferi di medie e grandi dimensioni come carnivori (in particolare felini) e ungulati; secondariamente piccoli mammiferi come lagomorfi e roditori. Viene sfruttata in maniera particolare per rilevare la presenza di animali elusivi, solitari o notturni. 1.3 Struttura e componenti delle fototrappole odierne Le fototrappole hanno visto una continua evoluzione e ad oggi, sono disponibili numerosi modelli con differenti funzionalità. In questa sezione verranno spiegate le componenti e le funzioni principali delle fototrappole, utili per una maggiore comprensione dei capitoli successivi. - Modalità di registrazione: i dispositivi odierni sono in grado di registrare immagini o video o anche entrambi. I video possono rivelarsi molto utili soprattutto per osservazioni etologiche. Le foto sono considerate sufficienti per la maggior parte degli scopi, soprattutto se raccolte tramite una raffica di scatti che permette di registrare più attimi consecutivi (Meek et al., 2012). - Sistemi di attivazione: permettono che la fototrappola si attivi automaticamente e che si avvii la registrazione. I dispositivi possono essere attivati tramite varie tipologie di processi. o Sistema Passive Infrared (PIR): sistema che rileva la differenza di temperatura tra l’aria e un oggetto all’interno dell’inquadratura. Quando tale differenza supera una certa soglia viene innescata la registrazione. La selettività di questa modalità si basa maggiormente sulle caratteristiche fisiologiche degli organismi. Possiede un’efficacia maggiore su animali con temperatura interna media tra 31.5 °C e 36.5 °C, invece non si dimostra funzionale in caso di specie a regolazione ectotermica e restituisce i risultati migliori in caso di temperatura esterna che si discosta di almeno 3°C da quella interna degli organismi (Meek et al., 2012). o Sistema Active Infrared (AIR): il dispositivo si compone di due parti in comunicazione tramite un raggio ad infrarossi che viene posto ad una determinata altezza. Quando esso viene ostacolato per il passaggio di un oggetto viene innescata la registrazione. Seleziona maggiormente gli oggetti catturati in base alla loro altezza ma non li distingue in base 4
alla temperatura. Essendo composto di due unità può risultare più complicato da disporre (Henschel and Ray, 2003). o Sistemi Meccanici: spesso consistono in un interruttore collegato ad un circuito la cui chiusura attiva la fototrappola. Gli animali entrando in contatto con questo interruttore danno avvio alla cattura delle immagini. o Sistema a intervallo di tempo: l’attivazione avviene a intervalli di tempo regolari prestabiliti, a prescindere che un oggetto sia entrato nell’inquadratura o meno. Questo tipo di attivazione si rivela utile quando il sistema PIR non è efficace, come in caso di temperatura troppo elevata dell’ambiente oppure nella rilevazione di organismi a regolazione non endotermica (Meek et al., 2012). - Tempo di attivazione: è il tempo che intercorre tra l’attivazione del dispositivo e l’effettiva registrazione delle immagini. Le fototrappole maggiormente performanti presentano valori ridotti di questa specifica, in media inferiori a 1s. Tempi lunghi di attivazione possono comportare la perdita del momento in cui transita l’animale e quindi ottenere un’immagine con solo una porzione del suo corpo o persino un’immagine senza soggetto (Rovero e Zimmermann, 2016). - Intervallo: è possibile inserire un intervallo di tempo tra una cattura avvenuta e quella successiva, durante il quale, il dispositivo non si riattiva. Ciò serve per regolare l’accumulo di immagini riguardanti stessi individui già rilevati, che possono stanziare per più tempo in prossimità del dispositivo o transitare davanti ad esso ripetutamente. - Numero di scatti per raffica: è possibile selezionare il numero di scatti da effettuarsi automaticamente, nel momento in cui la fototrappola viene attivata. Questo serve per raccogliere più scene dello stesso evento, facilitando così eventuali identificazioni e riconoscimenti, potendo osservare dettagli diversi attraverso la sequenza di scatti. - Flash: come si può desumere dal Paragrafo 6.1, il sistema di illuminazione ha subito varie evoluzioni durante lo sviluppo del camera-trapping. Ad oggi le tipologie maggiormente diffuse sono: o Flash a luce bianca: provocano un bagliore di luce bianca nel raggio del visibile. Permettono di ottenere foto a colori, sia di giorno che di notte, per questo vengono sfruttati per attività in cui sia necessaria l’identificazione o persino il riconoscimento degli individui tramite la loro colorazione. 5
Tra i flash a luce bianca troviamo quelli dotati di tubo allo xenon. Effettuano un breve lampo ma intenso, riuscendo così a immortalare meglio gli animali in movimento (Rovero, 2013), ma causando anche maggior disturbo, per questo si sono diffusi anche flash LED a luce bianca che ricrea una luce maggiormente soffusa. Questo è meno performante però dovrebbe ridurre il disturbo recato alla fauna. o Flash agli infrarossi: emettono un fascio di luce oltre il rosso lontano e quindi, risultano praticamente invisibili agli uomini e si presume, alla maggior parte della fauna. Questi però, non consentono di ottenere foto di qualità sufficiente da permettere il riconoscimento degli individui, perché possono alterare i colori di tratti distintivi che vengono sfruttati per riconoscere esemplari differenti della stessa specie. I flash a infrarossi possono essere di tipologia “low glow” o “no glow” si distinguono per la lunghezza d’onda che sfruttano (Vedi Paragrafo 1.4) (Apps, 2018). 1.4 Il camera-trapping come tecnica poco invasiva Le tecniche di monitoraggio della fauna possono essere classificate in base alla tipologia di contatto tra l’operatore e l’animale che esse richiedono per essere messe in atto. Su questa base possiamo dividerli in metodi diretti e indiretti. I metodi diretti prevedono un contatto diretto visivo o acustico tra l’operatore e l’organismo. Questi possono essere a loro volta suddivisi in metodi diretti attivi e passivi. Nei primi, oltre a un contatto diretto avviene anche un’interazione tra operatore e organismo che porta a una variazione del comportamento di quest’ultimo, o almeno, a rendersi conto della presenza dell’operatore, in questi rientrano ad esempio i metodi che prevedono catture fisiche per vari scopi ma anche i censimenti in battuta. I metodi diretti passivi invece, pur sempre presumendo un contatto diretto con l’organismo, non includono alcuna interazione, quindi tra questi potremmo inserire i rilevamenti tramite avvistamenti o l’ascolto di segnali sonori che non influenzano il comportamento degli organismi interessati. Oltre ai metodi diretti, la gestione della fauna si serve anche di strategie indirette, ovvero dove non si verifica alcun contatto tra l’operatore e l’animale ma l’analisi verrà fatta in base ad alcuni segni lasciati dagli organismi. Anche i metodi indiretti, a loro volta, possono essere suddivisi in metodi indiretti attivi e passivi. I primi prevedono che l’operatore disponga precisi apparecchi all’interno dell’habitat affinché gli organismi lascino traccia della loro presenza, come sistemi per la cattura del pelo. Invece i secondi prendono in considerazione le tracce lasciate naturalmente dagli animali (Università degli Studi dell’Insubria, 2010). 6
In questa classificazione il camera-trapping viene inserito nei metodi indiretti attivi. Questo perché prevede la disposizione della fotocamera automatica nell’habitat interessato. I metodi indiretti, generalmente, sono in grado di causare un ridotto disturbo alle specie target e per questo vengono definiti poco invasivi o non invasivi. In particolare, tra i metodi indiretti attivi, il fototrappolaggio risulta essere tra i meno invasivi, in quanto, spesso, non rende necessaria l’interazione diretta tra l’animale e la fotocamera, a differenza di altri metodi della stessa categoria. Nonostante il camera-trapping sia spiccatamente meno invasivo rispetto ad altre strategie, come ad esempio la cattura di un organismo e la disposizione su di esso di un tag o di un trasmettitore, esso comunque, presenta alcune caratteristiche che sono state prese in considerazione per la valutazione del disturbo che potrebbero provocare sulla fauna. Gli elementi che potrebbero incidere maggiormente nel disturbo che apporta una fototrappola sono: il flash, il rumore che essa provoca all’attivazione e in fase di scatto, la presenza stessa del dispositivo che può risultare estraneo e l’odore rilasciato dall’uomo durante la disposizione dei dispositivi. Come visto nel Paragrafo 1.3, esistono varie tipologie di flash che possono essere presenti su questi dispositivi. Tra di essi, quello che probabilmente apporta il disturbo più intenso alla maggior parte delle specie, è il flash bianco allo xenon. Questo emana un breve lampo ma molto intenso. Tale meccanismo può provocare consistente disturbo a causa della sua visibilità sia alla sorgente che sugli oggetti su cui si riflette, fino a poter indurre gli organismi ad evitare maggiormente l’area circostante la fototrappola (Wegge et al., 2004; Apps and McNutt, 2018). Similmente il flash a LED bianchi produce una luce simile ma maggiormente diffusa. Oltre ai flash a luce bianca, le fototrappole possono presentare flash a infrarossi, questi dovrebbero creare un disturbo minore alla fauna, si differenziano in “low glow” e “no glow”. I primi sfruttano una lunghezza d’onda minore, emanano una luce rossa che può essere vista dall’uomo solo alla sorgente ma non negli oggetti in cui si riflette. La tipologia “no glow” invece, sfrutta una lunghezza d’onda maggiore, risultando praticamente invisibile alla maggior parte degli uomini, sia alla sorgente che negli oggetti in cui si riflette, ma poiché appare debolmente visibile ad alcune persone si presume che essa possa essere notata anche da molti animali notturni, anche se non ci sono ancora studi accertati riguardo a ciò (Meek et al, 2014; Apps and McNutt, 2018). Nel lavoro di Meek et al. del 2014 si è misurato il rumore emesso da alcuni modelli di fototrappole e da tale misurazione è risultato che rientra nel campo uditivo di alcune specie. Nel test però non potevano essere considerati i rumori presenti in un ambiente naturale, che eventualmente coprirebbero quello della fototrappola, e le varie distanze a cui questo verrebbe percepito. 7
Inoltre, la presenza stessa della fototrappola potrebbe diventare un elemento di disturbo. Dal materiale che si raccoglie tramite questa tecnica, a volte è possibile vedere come un animale si accorga della presenza del dispositivo e di conseguenza scappi oppure si avvicini per interagire con esso. Seppur le cause precise di questi comportamenti devono ancora essere definite, sono fattori da tenere in considerazione durante uno studio, dato che potrebbero portare gli organismi a evitare zone in cui siano presenti questi dispositivi, alterando i rapporti di abbondanza tra le specie nel materiale registrato. Infine, è verosimile che, anche l’odore rilasciato dagli operatori durante gli spostamenti all’interno dell’area e soprattutto in fase di collocamento della fototrappola, causi un’alterazione dei comportamenti degli animali. Questo può verificarsi anche nella maggior parte degli altri metodi di indagine. 1.5 Il camera-trapping a confronto con altre tecniche di indagine 1.5.1 Il camera-trapping e il rilevamento dei segni di presenza Confrontando il camera-trapping con indagini effettuate tramite il rilevamento di segni di presenza come impronte, escrementi, ciuffi di pelo o piume, resti di predazione, il primo fattore da sottolineare è la differente affidabilità dei dati raccolti tramite queste due tecniche. Foto e video di elevata qualità rientrano nei così detti “hard fact”, ovvero tipologie di dati con elevata affidabilità. Meno affidabili sono invece segni di presenza lasciati da animali la cui identificazione è spesso complicata e può essere effettuata solo da operatori con un certo grado di esperienza. In più, la ricerca di segni di presenza è meno standardizzabile rispetto al camera-trapping (Rovero e Zimmermann, 2016). Il camera-trapping e il rilevamento dei segni di presenza possono essere utilizzati per la costruzione degli inventari faunistici, stime di abbondanze relative e di popolazione. Nello studio di De Luca del 2005, è possibile notare che, con il fototrappolaggio, è stato rilevato un numero maggiore di specie in un tempo minore rispetto all’analisi dei segni di presenza. Considerando le stesse applicazioni, nell’analisi di Roberts del 2011, il camera-trapping sembra essere il miglior compromesso tra costo, sforzo sul campo e precisione; risultati simili appaiono anche nel lavoro di Rahman et al. del 2016. Quest’ultimo autore però, nota che anche i segni di presenza restituiscano risultati di poco inferiori. Infine, in altri studi i due metodi sembrano essere equivalenti (Espartosa et al., 2011; Garrote et al., 2014; Pfeffer et al. 2017). Il camera-trapping sembra essere maggiormente efficiente in periodi di campionamento a medio e lungo termine. Ciò 8
perché il fototrappolaggio richiede un maggior numero di giorni per rilevare la presenza delle specie più rare (Espartosa et al., 2011; Roberts 2011) ma produce una quantità di dati superiore e con affidabilità più alta (Roberts, 2011; Rahman et al., 2016). I vantaggi a lungo termine di questa tecnica si riscontrano anche per i fattori economici, riportati nel Paragrafo 6.2. Le stime di popolazione, tramite camera-trapping e segni di presenza, possono essere effettuate tramite il processo di cattura e ricattura. Nel caso del camera-trapping, questo metodo consiste nell’analisi delle frequenze di ricattura di immagini degli stessi individui riconosciuti tramite segni distintivi, invece nel caso dei segni di presenza vengono normalmente considerate le analisi genetiche degli escrementi rinvenuti. Queste due strategie sono state messe a confronto nei lavori di Janečka et al. del 2011 e di Anile et al. del 2014 e in entrambi i casi il fototrappolaggio sembra aver restituito i risultati più precisi. In particolar modo nello studio di Janečka del 2011 effettuato sul leopardo delle nevi (Panthera uncia), le analisi genetiche hanno prodotto risultati non precisi a causa del fatto che questi animali depositino gli escrementi in aree comuni alterando le stime di densità, e quindi di popolazione, a causa dello stato spesso deteriorato dei campioni delle feci (Rovero e Zimmermann, 2016). Inoltre, le analisi genetiche non permettono la stima delle età degli individui, e richiedono laboratori di analisi nei pressi delle aree studiate (Janečka et al., 2011). Problematiche che non sussistono nella pratica del camera-trapping. Per concludere la comparazione tra queste due metodiche, si può considerare la loro ripetibilità. Nel camera-trapping è più semplice definire dei protocolli (Rovero e Zimmermann, 2016), che vengono caratterizzati da precisi disegni di campionamento, dalle caratteristiche del collocamento della fototrappola (altezza dal suolo, angolo di inclinazione, orientamento, ecc) e dalle configurazioni impostate nei dispositivi. I protocolli permettono un confronto più semplice tra studi di differenti aree geografiche e quindi facilitano una gestione della biodiversità globale; vengono delineati da diverse organizzazioni e variano a seconda degli habitat o delle specie target, come ad esempio il Tropical Ecology Assessment and Monitoring (TEAM), della Conservation International, ideato per gli habitat tropicali, oppure il protocollo della Wildlife Conservation Society per il leopardo africano (Panthera pardus) (Meek et al., 2012). 1.5.2 Il camera-trapping e le trappole Nella consistente revisione di Wearn and Glover-Kapfer del 2019 il camera-trapping si rivela essere maggiormente efficiente, per l’applicazione a inventari faunistici e stime di abbondanza, rispetto alle trappole a vivo o per peli. Ciò perché questi dispositivi richiedono necessariamente l’uso di 9
attrattivi o esche, un comportamento preciso da parte degli animali interessati e perché permettono la cattura di un organismo alla volta. L’uso di attrattivi ed esche può alterare il naturale uso del territorio da parte degli animali, i loro effetti possono variare nel tempo sugli individui che sono già venuti a contatto con essi e infine possono avere effetti diversi sugli individui della stessa specie in base ad età, sesso ed altre caratteristiche. Questi fattori fanno sì che le abbondanze relative delle specie catturate non rappresentino quelle della comunità reale, riducendo le informazioni estrapolabili da questo metodo. In secondo luogo, anche in caso di attrattivo efficace, questo non assicura il funzionamento delle trappole in quanto comunque questi dispositivi richiedono una precisa interazione da parte degli organismi e che essa si risolva nella loro cattura. Infine, le trappole hanno bisogno di essere svuotate e allestite nuovamente per ogni evento di cattura, dato che non possono contenere più animali contemporaneamente. Questo causa la perdita di ulteriori eventuali catture, e quindi di dati, a differenza del fototrappolaggio dove, il numero di immagini è limitato solo dallo spazio di memoria e dall’autonomia delle batterie, ma ad ogni modo, in condizioni regolari, permettono la possibile registrazione di un numero di dati nell’ordine delle migliaia. Notevole differenza tra le due tecniche è il disturbo che esse recano alla fauna. Le trappole provocano uno stress maggiore rispetto al camera-trapping, però è necessario sottolineare, come queste ultime, permettano di analizzare direttamente un intero organismo o parte di esso, procurando una serie di possibili informazioni non deducibili o, deducibili con minore affidabilità, tramite le immagini raccolte con il camera-trapping (Wearn and Glover-Krapfen 2019). 1.5.3 Il camera-trapping e la radiotelemetria Il camera-trapping e la radiotelemetria possono essere usate per gli studi riguardo il comportamento territoriale da parte degli animali, dai quali è possibile anche trarre le stime di densità della popolazione. Con questi metodi poi è possibile analizzare i ritmi di attività delle specie interessate. La radiotelemetria permette di valutare fenomeni di tassi di emigrazione e mortalità, a differenza del camera-trapping, dove questi possono essere confusi tra loro, risultando entrambi come nuova assenza durante i monitoraggi (Miller et al., 2010). La radiotelemetria inoltre, è largamente utilizzata per le stime di densità delle popolazioni. Nell’ultimo decennio si è notato come il camera-trapping, tramite metodi di cattura e ricattura, che considerano la variabile spaziale in fase di rielaborazione, spesso sia in grado di eguagliare i risultati della radiotelemetria (Núñez-Pérez, 2011; Noss et al., 2012; Zimmermann et al., 2013; Rovero e Zimmermann, 2016). Considerando i periodi di indagine maggiormente prolungati che usualmente richiede la telemetria e dovuti alle attività di cattura e 10
installazione del trasmettitore sull’animale, che in seguito dovrà essere anche recuperato, l’uso del camera-trapping restituirebbe risultati maggiormente rappresentativi, perché permetterebbe un’analisi più veloce e quindi meno suscettibile a variazioni della popolazione per fenomeni di migrazione, nascite o morti (Rovero e Zimmermann, 2016). La riduzione delle tempistiche tramite il camera-trapping potrebbe avere anche risvolti economici positivi, ma soprattutto, la sua applicazione, rispetto alla radiotelemetria, evita un contatto diretto con l’organismo e le problematiche che può causare il dispositivo applicato sull’animale. 11
2. MATERIALI E METODI 2.1 L’area di studio L’area di studio è situata in provincia di Belluno nella regione del Veneto. È parte del Parco Nazionale delle Dolomiti Bellunesi e occupa la porzione meridionale dell’estremo orientale del parco. Figura 1. Posizione geografica del Veneto Figura 2. Posizione geografica del PNDB Figura 3. Posizione geografica dell’area di studio 12
Il PNDB è situato a nord della regione Veneto. È un’area protetta che rientra nei 25 parchi nazionali italiani e nei 4 situati sulle Alpi. In particolare, occupa la porzione meridionale della catena montuosa delle Dolomiti. Il parco si sviluppa su una superficie di circa 310 km2 ed è interamente situato nella regione biogeografica alpina. La sua quota varia tra i 398 m s.l.m. e 2565 m s.l.m. e questo permette la presenza di una grande varietà di habitat (Ente PNDB, 2020). Consultando la cartografia CORINE Land Cover e Natura 2000 dell’area protetta, la tipologia di vegetazione maggiormente diffusa sono le foreste di latifoglie che si estendono pressappoco per il 35% dell’area protetta. Queste sono costituite soprattutto da faggete, che rivestono circa il 21%. La specie dominante arborea è Fagus sylvatica che viene accompagnata da diverse altre in funzione dell’altitudine: tra 600m e 1200m si trova con Ostrya carpinifolia, tra 1200m e 1400m si può presentare la faggeta pura o con Abies alba e infine tra 1400m e 1600m con Larix decidua o Picea abies (Ente PNDB, 2020). Invece il sottobosco è caratterizzato da Orchidaceae, Gramineae, Juncaceae, e Cyperaceae come la caratteristica Carex alba. A differenza delle estese foreste di latifoglie, i boschi di aghifoglie occupano circa al 10% della superficie del parco. Ulteriori habitat caratteristici del parco sono le mughete, ricoprendo intorno al 17% della superficie totale. In esse rientra l’habitat identificato con il codice 4070 secondo la classificazione Natura 2000, ovvero la boscaglia di Pinus mugo e Rhododendron hirsutum che appartiene agli habitat di interesse comunitario prioritari indicati nella Direttiva 92/43/CEE. Essa si trova tipicamente oltre il limite degli alberi, sui ghiaioni alla base delle pareti rocciose, ma si può rinvenire fino a fondovalle su greti ghiaiosi con microclimi più freddi, come in strette vallate. Mantenendosi oltre al limite inferiore alpino, ma dove non è presente il pino mugo, è possibile riconoscere le lande alpine, comunità anch’esse arbustive ma meno sviluppate in altezza della boscaglia. In esse, oltre al rododendro, potranno essere presenti Ericaceae e ginepri. Se invece la vegetazione assume carattere prevalentemente erbaceo andrà a costituire i pascoli che ricoprono quasi il 14% della superficie totale. Dove il terreno non è maturo, si potrà trovare una rada vegetazione che affiora tra gli accumuli detritici fino ad arrivare alla scarna vegetazione casmofitica delle pareti rocciose, quest’ultimi due habitat, insieme alle rocce nude e ai ghiaioni, costituiscono circa il 15% dell’area protetta (Provincia Autonoma di Trento, 2020). Le restanti porzioni della superficie del parco sono costituite dalla vegetazione erbacea al di sotto della linea degli alberi, come bordure planiziali, fasce 13
riparie e praterie; da greti di fiumi, di torrenti e dalle morfologie idriche; infine la superficie di suolo antropizzato, o sfruttato per attività agricole, costituisce meno dell’1% del parco. Il parco ha la finalità di salvaguardare le specie animali, vegetali e gli altri elementi naturali da cui è caratterizzato. Ciò però, senza trascurare l’integrazione della presenza umana al suo interno, quindi promuovendo attività sostenibili e preservando i lavori tradizionali (Ente PNDB, 2007). Per ottemperare in maniera efficace a queste finalità, con il Decreto Ministeriale del 20 aprile 1990 l’area è stata suddivisa in 4 tipologie di zone in base al grado di protezione che devono ricevere e alle possibili attività che possono essere esercitate dentro ai loro confini. I 4 tipi di zone principali sono: - Zone a riserva integrale. - Zone a riserva naturale generale. - Zone di protezione. - Zone di penetrazione. (Vedi Figura 4). Figura 4. Zonazione gestionale del PNDB Le zone a riserva integrale consistono in aree ad un elevato stato di conservazione e sono sottoposte al massimo grado di protezione per permettere che si evolvano naturalmente. Quindi in queste zone 14
non è previsto alcun tipo di intervento e sono vietate tutte le attività eccetto: il transito di visitatori su sentieri ufficiali segnalati, studi scientifici e attività amministrative da parte di professionisti con permesso e la sorveglianza da parte dei corpi incaricati. Le zone a riserva naturale generale coprono la maggior parte della superficie del parco. In esse sono consentiti interventi al fine di ristabilire l’equilibrio ecosistemico ma comunque ricevono un alto grado di protezione. Pertanto, è vietata la caccia e la pesca, qualsiasi attività di raccolta di flora, fauna, elementi geologici e reperti archeologici. Il rilascio di specie non autoctone. L’abbandono di rifiuti e il campeggio. Non è possibile eseguire opere di scavo, di alterazione della rete idrologica, di costruzione di nuove strade carrabili e la trasformazione dei terreni boschivi ad agricoli. Si possono praticare l’escursionismo, l’alpinismo e lo scialpinismo. È permessa la gestione dei rifugi e l’alpeggio tradizionale. Nelle zone di protezione sono consentite le medesime attività economiche e ricreative della zona a riserva integrale naturale. Inoltre, viene promosso il rinnovamento della rete escursionistica. Infine, sono permesse le attività agro-silvo-pastorali con mezzi meccanici autorizzati. Sono permessi interventi edili di manutenzione strettamente necessaria alle strutture già esistenti. Zone di penetrazione: consistono nelle aree di ricezione dei visitatori muniti di automezzo. Per questo esse si trovano lontano dai centri ad alta conservazione naturale. Qui sono permessi interventi di protezione delle strade ed estetica degli edifici (Ministero dell’Ambiente, 1990). L’area di studio occupa una superficie di 21 km2 della regione sud-orientale del PNDB. Essa è delimitata a ovest dalla valle dell’Ardo, a sud dal monte Serva, a est dal confine orientale del parco e a nord dalle cime di Cajada, infine sono comprese alcune espansioni verso la val Grave de San Marco. Questa, presenta un’elevata variabilità ambientale, dagli ambienti di fondovalle fino a quelli di alta quota. Anche nell’area di studio come nel parco i boschi di latifoglie occupano la maggior parte della superficie. La loro copertura raggiunge circa il 42%, le associazioni in cui i faggi fanno da genere guida sono la componente più importante. I boschi a conifere sono la seconda tipologia di vegetazione più diffusa. Occupano circa il 30% con una consistente preponderanza degli abieteti su lariceti, pinete e formazioni antropogene, ovvero vegetazioni arboree la cui presenza è dovuta ad attività antropiche di rimboschimento. Molto rappresentati sono anche i pascoli alpini che ricoprono circa il 20% della superficie dell’area di studio. Gli ambienti di alta quota rappresentano il 7%, essi consistono soprattutto di mughete seguite da ambienti di vegetazione rupicola, roccia nuda e ghiaioni. Infine, le superfici antropizzate o ad uso agricolo non risultano essere significative. 15
Val Grave de San Marco Forcella Col Torond Monte Pelf Cime Tanzon e Zervoi Monte Serva Figura 5. Geografia dell’area di studio. Figura 6. Copertura del suolo dell’area di studio. L’area di studio comprende: i versanti del monte Serva, la valle dell’Ardo, con la sua diramazione est (Val Rui Fret), e infine la foresta di Cajada con le alture confinanti. Il monte Serva occupa la porzione meridionale dell’area presa in esame. In particolare, sono i versanti sud e a sud-ovest quelli a essere interessati. Questi sono caratterizzati soprattutto da pascoli alpini che vengono sfruttati per la monticazione di ovini e caprini. Spingendosi ad altitudini maggiori è possibile trovare circoscritte superfici di habitat di alta montagna, caratterizzati da vegetazione rada e suoli rocciosi. Tra il Serva e le Pale della Mola si sviluppa la valle dell’Ardo e la Val Rui Fret. Queste zone occupano la porzione centro-occidentale dell’area di studio, sono maggiormente ombrose e caratterizzate da latifoglie, in particolare dall’associazione orno-ostrieto. A seguire si trovano anche consistenti superfici di conifere. 16
A nord-est della Val Rui Fret le cime del Tanzon e del Zervoi la separano dalla piana di Cajada. Quest’ultima rappresenta la regione nord-orientale dell’area di studio. Consiste in una piana boscosa confinata a sud dai rilievi sopracitati. A ovest invece sono le pendici Pelf a costituire un’importante barriera geografica. E a nord dalle cime di Cajada. Da queste montagne l’area prosegue ulteriormente sul versante settentrionale, discendendo la forcella di Col Torond, fino alla Val Grave de San Marco. La foresta di Cajada e le alture limitrofe presentano soprattutto superfici boscate che sono composte, in egual misura, da habitat caratterizzati da conifere e da superfici ricoperte da latifoglie, in particolare da faggete in varie associazioni. Le zone rimanenti di questo territorio sono costituite da pascoli reperibili sia in quota, come nei dintorni di Malga Zervoi, ma anche nella piana. In entrambi i casi sfruttati per l’alpeggio. Inoltre, è possibile trovare boscaglie di pino mugo e rododendro, invece non significative sono le superfici di ghiaioni e roccia nuda. Considerando la classificazione CORINE Land Cover (CLC) per la categorizzazione dell’uso e della copertura del suolo, l’area di studio presenta i livelli elencati nella Tabella 1. Codice CLC Legenda Superficie (km2) %copertura 31100 Bosco di latifoglie 0,102 0,487 31141 Faggeta altimontana 1,669 7,949 31142 Faggeta montana tipica esalpica 2,305 10,977 31145 Faggeta primitiva 1,730 8,237 31146 Faggeta submontana con ostria 0,827 3,937 31182 Orno-ostrieto primitivo 0,637 3,032 31183 Orno-ostrieto tipico 1,438 6,845 31193 Carpineto con ostria 0,106 0,506 31211 Abieteto dei substrati carbonatici 1,860 8,859 31213 Abieteto dei suoli mesici con faggio 0,240 1,142 31215 Abieteto esomesalpico montano 2,765 13,168 31221 Formazione antropogena di conifere 0,881 4,195 31231 Lariceto primitivo 0,108 0,515 31232 Lariceto tipico 0,338 1,609 31252 Pineta di pino silvestre esalpica con faggio 0,077 0,367 31258 Pineta di pino silvestre primitiva 0,037 0,175 32120 Pascoli di pertinenza di malga 2,450 11,669 32130 Pascoli diversi 1,664 7,925 32211 Arbusteto 0,217 1,031 32232 Mugheta mesoterma 0,764 3,638 33200 Rocce nude, falesie e affioramenti 0,462 2,199 33210 Greti e letti di fiumi e torrenti 0,126 0,601 33230 Ghiaioni 0,166 0,789 33300 Aree a vegetazione rada 0,032 0,154 Tabella 1. Coperture e usi del suolo presenti nell’area di studio secondo la classificazione CORINE Land Cover. 17
Considerando invece la classificazione Natura 2000 (N2K) per la categorizzazione degli habitat, l’area di studio presenta le tipologie elencate nella Tabella 2. Superficie Codice N2K Legenda %copertura (km2) 4060 Lande alpine e boreali 0,121 0,575 4070 Boscaglie di Pinus mugo e Rhododendron hirsutum (Mugo- 0,317 1,508 Rhododendretum hirsuti) 6150 Formazioni erbose boreo-alpine silicee 0,023 0,110 6170 Formazioni erbose calcicole alpine e subalpine 1,155 5,502 6210 Formazioni erbose secche seminaturali e facies coperte da 1,120 5,336 cespugli su substrato calcareo (Festuco-Brometalia) 6230 Formazioni erbose a Nardus, ricche di specie, su substrato siliceo 0,116 0,554 delle zone montane 6430 Bordure planiziali, montane e alpine di megaforbie idrofile 0,003 0,014 6520 Praterie montane da fieno 0,037 0,175 7230 Torbiere basse alcaline 0,009 0,041 8120 Ghiaioni calcarei e scistocalcarei montani e alpini (Thlaspietea 0,258 1,229 rotundifolii) 8160 Ghiaioni dell'Europa centrale calcarei di collina e montagna 0,033 0,159 8210 Pareti rocciose calcaree con vegetazione casmofitica 1,020 4,859 9130 Faggeti dell'Asperulo-Fagetum 5,302 25,247 9140 Faggeti subalpini dell'Europa centrale con Acer e Rumex arifolius 1,019 4,850 9180 Foreste di versanti, ghiaioni e valloni del Tilio-Acerion 0,048 0,226 91K0 Foreste illiriche di Fagus sylvatica (Aremonio-Fagion) 3,698 17,611 91L0 Querceti di rovere illirici (Erythronio-Carpinion) 0,161 0,767 9530 Pinete (sub-)mediterranee di pini neri endemici 0,077 0,368 Nonhabitat nd 6,482 30,869 Tabella 2. Habitat presenti nell’area di studio secondo la classificazione Natura 2000. 18
Riguardo alla gestione dell’area di studio è da sottolineare che non è completamente contenuta nei confini del PNDB. Delle 21 celle che compongono il territorio studiato, 13 ricadono interamente all’interno del parco invece 8 ricadono in piccola parte all’esterno dell’area protetta. Complessivamente il 90,5% dell’area presa in esame ricade all’interno del parco e la parte rimanente è subito fuori di esso. Quindi quest’ultima non soggiace alle norme di gestione dell’ente nazionale. La porzione dell’area di studio che rientra nei confini del parco è composta prevalentemente da zone a riserva naturale generale. Queste occupano praticamente la totalità della valle dell’Ardo e del monte Serva, mentre la foresta di Cajada e i rilievi limitrofi presentano una maggioranza di zone di protezione. Le zone di penetrazioni sono minime e corrispondono ad alcune malghe, assenti invece le zone a riserva integrale (Vedi Figura 7). Figura 7. Zonazione gestionale dell’area di studio. 19
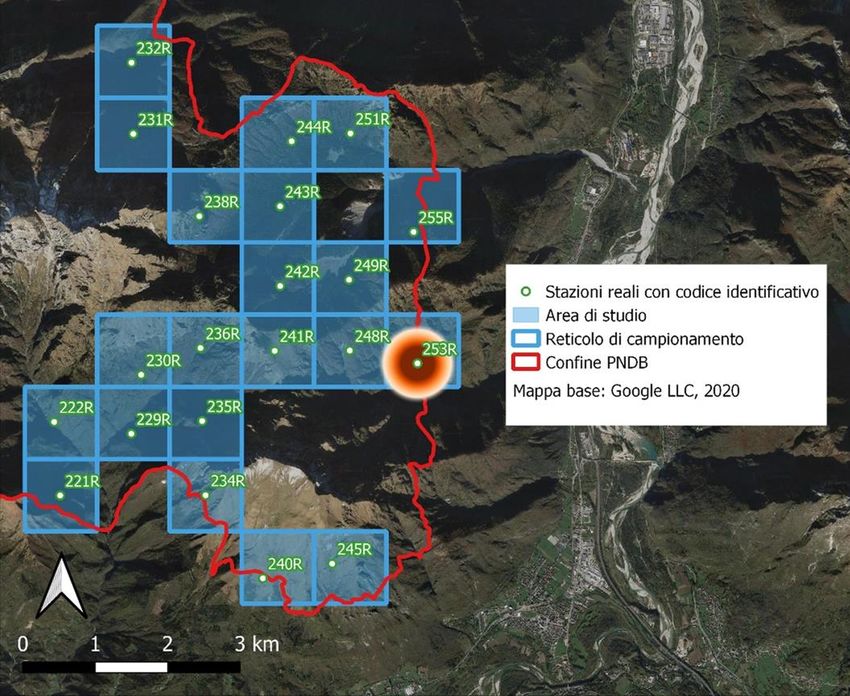
2.2 Elaborazioni cartografiche e disegno di campionamento Per la progettazione del disegno di campionamento è stato utilizzato il programma QGIS 2.18. Per i calcoli delle coperture del suolo dell’inquadramento geografico e per le immagini è stato usato QGIS 3.10. I layer utilizzati per queste operazioni sono stati i seguenti: - Shapefile del reticolo europeo ERTS89/LAEA 1 km fornito dal sito dell’Agenzia Europea dell’Ambiente. - Shapefile della copertura e uso del suolo CORINE Land Cover della Provincia di Belluno, fornito dal Geoportale della Regione Veneto. - Shapefile del Confine del Parco Nazionale delle Dolomiti Bellunesi fornito dal sito ufficiale del parco. - Shapefile degli habitat secondo la classificazione Natura 2000 del sito Rete Natura IT3230083 fornito dal sito della Regione Veneto. - Shapefile della zonazione gestionale del PNDB concesso dall’Ente Parco Dolomiti Bellunesi. - Foto satellitari fornite dai servizi open source di Google LLC. Per il posizionamento delle fotottrappole è stato redatto un apposito disegno di campionamento che ha previsto in primo luogo di suddividere l’area di studio in base al reticolo di celle di 1*1 km individuato dal Regolamento (UE) n. 1089/2010 relativo all'interoperabilità dei set di dati territoriali e dei servizi di dati territoriali e legato a quanto previsto dalla Direttiva 2007/2/CE. La Direttiva 2007/2/CE INSPIRE (INfrastructure for SPatial InfoRmation in Europe), recepita nell’ordinamento italiano con il decreto legislativo 27 gennaio 2010 n. 32, ha come obiettivo “di rendere omogenee e condivisibili, all’interno dell’Unione europea, le informazioni georeferenziate di carattere ambientale, affinché queste siano di supporto alle politiche ambientali o per ogni altra attività che possa avere ripercussioni sull’ambiente” (MATTM, 2020). Nell’ambito di tale direttiva i “dati territoriali” sono definiti come “i dati che attengono direttamente o indirettamente, a una località o a un’area geografica specifica” (Art. 3). In particolare, si è deciso di applicare il reticolo indicato in tale direttiva perché l’area di studio ricade quasi interamente nel sito Rete Natura 2000, delle Dolomiti Feltrine e Bellunesi (IT3230083). Per ogni cella è stato poi identificato il proprio centroide, e ad ognuno di essi è stato fatto corrispondere una stazione di campionamento. L’uso dei centroidi rende la matrice di campionamento omogenea, e le distanze, tra una stazione di campionamento e l’altra, costanti. Questo fa sì che specie con lo stesso home range abbiano le 20
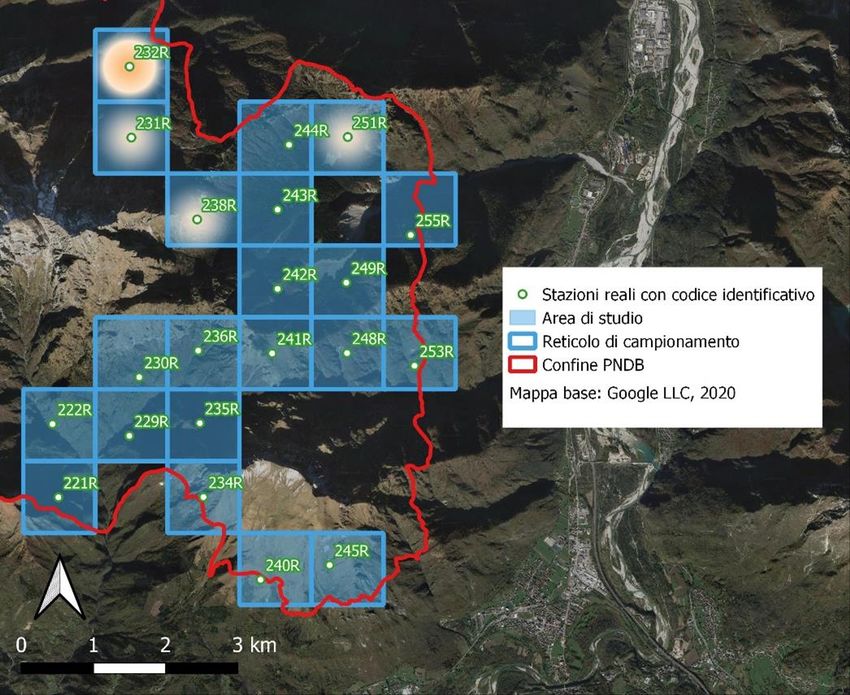
stesse probabilità di essere fotografate in qualsiasi porzione dell’area presa in esame. La distanza tra le stazioni di fototrappolaggio infatti influenza la probabilità di cattura delle specie che varia in base alla grandezza del loro home range. In caso di punti di rilevamento troppo distanti le specie dall’home range ridotto hanno meno possibilità di essere fotografate. Al contrario, a parità di stazioni di campionamento, se esse sono troppo ravvicinate, potrebbero coprire un’area troppo ristretta per rilevare diversi esemplari di una specie caratterizzata da ampio home range (Rovero e Zimmermann, 2016). Creati i centroidi delle celle sono stati eliminati i punti che ricadevano oltre i 1800 m di quota. Dei punti rimanenti sono stati selezionati quelli accessibili da sentieri che permettessero di ricoprire al meglio l’area del monte Serva, della valle dell’Ardo e della foresta di Cajada. Sono così risultati 21 punti, correlati a 21 celle di 1*1 km, a formare una maglia continua di 21 km2 totali, dove però non tutte le celle sono adiacenti tra loro (Vedi Figura 8). Figura 8. Reticolo di campionamento dell’area di studio. All’interno di ogni cella si trova la corrispettiva stazione di fototrappolaggio teorica, ovvero il proprio centroide. 21
2.3 Protocollo metodologico L’indagine è stata effettuata tra il 6 giugno e il 20 settembre 2019 e ha previsto l’impiego di 20 fototrappole, tutte modello Scoutguard SG562D (Vedi Figura 9). Figura 9. Fototrappola modello Scoutguard SG562D collocata nella stazione 235R. Questo modello è in grado di raccogliere sia immagini, con possibili dimensioni di 5, 10 o 14MP, sia video con risoluzione di 1280x720p. Possiede un angolo di ripresa di 55° e un tempo di attivazione di 1,2 s. Il processo di attivazione e quindi di cattura dell’immagine può avvenire tramite due sistemi. Il primo consiste in una classica modalità passiva a infrarossi (Passive Infrared, PIR). Essa induce l’attivazione nel caso in cui la differenza tra la temperatura dell’aria e quella di un oggetto presente nell’inquadratura superi una certa soglia (Meek et al., 2012). Questa soglia è configurabile tramite 3 modalità: bassa, media e alta. Inoltre, è selezionabile anche l’intervallo di tempo che deve intercorrere tra lo scatto di un primo oggetto rilevato e quello di una successiva rilevazione. Ciò serve per regolare l’accumulo di immagini riguardanti stessi individui già rilevati che possono stanziare per più tempo in prossimità del dispositivo. Il sistema PIR può essere attivato o disattivato e in alternativa è possibile utilizzare una modalità di attivazione a tempo. Ovvero, la fotocamera effettua uno scatto ad ogni intervallo di tempo prestabilito a prescindere che un oggetto sia entrato nell’inquadratura. Questo tipo di attivazione può essere utile quando il sistema PIR non si rivela 22
efficace, come in caso di temperature troppo elevate dell’ambiente oppure nella rilevazione di organismi ectotermi (Meek et al., 2012). La modalità PIR e a intervalli di tempo possono essere attivate in contemporanea. Infine, per entrambe è possibile definire il numero di scatti per raffica ad ogni attivazione. Il sistema di flash è composto da un illuminatore a luce bianca e uno a infrarossi. Il primo consiste in un tubo allo xenon. Esso permette di catturare foto a colori e nitide, ciò facilita l’identificazione degli animali ritratti. Tuttavia, può richiedere l’elevato consumo di batteria e tempi per ricaricarsi maggiori rispetto al flash a infrarossi. Quest’ultimo invece permette foto meno definite ma consuma meno energia e possiede tempi di ricarica più veloci (Meek et al., 2012). Le due tipologie di flash sono attive contemporaneamente e coprono una lunghezza massima di 27m. È possibile regolare la potenza del sistema di illuminazione e quindi la sua gittata tramite la scelta tra: long range e short range. In questo studio, per tutte le fototrappole, sono state utilizzate le medesime impostazioni le quali sono state riassunte nella Tabella 3. Dimensione Sistema di Sensibilità Gittata Modalità Raffica Intervallo media foto attivazione PIR flash Lunga o Foto 5mb PIR Normal 3 scatti 0 sec breve Tabella 3. Tabella riassuntiva delle impostazioni di fototrappolaggio utilizzate per questo studio. Analisi delle impostazioni utilizzate: - Modalità: foto Questa modalità è stata scelta perché permette di raccogliere una tipologia di dato sufficiente al riconoscimento di una specie, occupa meno spazio di memoria di un video e allunga l’autonomia del dispositivo. Infine, facilita il processo di trasferimento e catalogazione dei dati. - Dimensione media foto: 5mb Similmente anche la dimensione delle immagini è stata preferita in quanto sufficiente al riconoscimento delle specie, perché occupa una ridotta quantità di spazio di memoria e facilita le operazioni di trasferimento. - Sistema di attivazione: PIR 23
Puoi anche leggere