Caratteristiche di sorgente di piccoli terremoti
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Università degli Studi di Napoli “Federico II” Scuola Politecnica e delle Scienze di Base Area Didattica di Scienze Matematiche Fisiche e Naturali Dipartimento di Fisica “Ettore Pancini” Laurea triennale in Fisica Caratteristiche di sorgente di piccoli terremoti Relatori: Candidato: Prof. Gaetano Festa Rodolfo Petito Penna Matricola N85001340 A.A. 2020/2021
Introduzione In questo progetto di tesi studierò le proprietà dei piccoli terremoti, con l’obiettivo di ottenere una funzione sorgente grazie alla quale ricavare una mappa della dislocazione associata al terremoto di interesse. L’elaborato è suddiviso in 3 capitoli; nel primo si fa una panoramica generale sulla nascita della sismologia e sugli aspetti fenomenologici di un terremoto, descrivendo in che modo esso si origina e come può essere rilevato. Si procede poi alla trattazione delle proprietà fondamentali di esso e si ha l’introduzione del concetto di sforzo e deformazione, essenziali per giungere all’equazione delle elastodinamica. Viene, inoltre, approfondito il concetto di magnitudo e come esso è legato allo spettro in frequenza di un terremoto. Nel secondo capitolo vengono descritte le tecniche di deconvoluzione e di retro-propagazione. In riferimento alla prima particolare attenzione sarà rivolta alla “water level regularization” e ai benefici che essa comporta nel ricavare la funzione sorgente sia per segnali sintetici che reali, inoltre si terrà conto dell’effetto del rumore sul segnale registrato e sui problemi che la sua presenza comporta nell’applicazione della tecnica della deconvoluzione. Viene, in tale capitolo, anche chiarito il ruolo fondamentale svolto dalla funzione di Green, soluzione dell’equazione dell’elastodinamica. Nel terzo e ultimo capitolo la tecnica di deconvoluzione verrà applicata a due differenti segnali sintetici in modo da ricavare le funzioni sorgente e i relativi grafici. Poi la stessa tecnica in coppia con la retro-propagazione sarà utilizzata per analizzare un terremoto di magnitudo 4.1 avvenuto nei pressi di Benevento ed ottenere la rappresentazione grafica della dislocazione ad esso associato. 1

Capitolo 1 Origine e caratteristiche di un evento sismico 1.1 Sismologia e aspetti fenomenologici I terremoti sono fenomeni naturali con cui l’uomo convive sin dalla sua comparsa sulla Terra e ai quali, nel corso del tempo, ha cercato di dare una spiegazione. Per secoli un terremoto è stato interpretato come una punizione divina ai peccati dell’uomo; tuttavia non mancano nell’antichità proposte pseudoscientifiche sull’origine di questi eventi catastrofici, ad esempio i Babilonesi ricollegavano il verificarsi di un terremoto all’allineamento del Sole con particolari stelle. I Greci, invece, svilupparono diverse scuole di pensiero che individuavano come responsabile di un terremoto uno tra i quattro elementi naturali: terra, fuoco, acqua, vento. La nascita del Cristianesimo segna un profondo rafforzamento delle teorie sull’ipotesi divina di un sisma e bisognerà aspettare addirittura il XVIII secolo per assistere ad un approccio puramente scientifico del fenomeno. In tale secolo si ebbero due grandi terremoti (Lisbona nel 1755 e Calabria nel 1783) che provocarono numerose vittime ma che incrementarono notevolmente l’interesse scientifico verso questi fenomeni naturali. La sismologia nasce nei primi anni del ‘900 come scienza che, grazie all’osservazione e alla misurazione sperimentale delle onde sismiche, mira a descrivere le proprietà di un terremoto e i fenomeni che ad esso sono connessi. Un forte sviluppo di questa branca della Geofisica si è avuto grazie alla messa a punto di sistemi di calcolo e di misurazione molto avanzati che vengono oggi impiegati nelle varie stazioni sismiche distribuite su tutto il pianeta. Un insieme di stazioni sismiche poste ad una certa distanza l’una dall’altra costituisce una rete sismica che consente la raccolta di un gran numero di dati e permette la localizzazione di terremoti ma anche lo studio della loro distribuzione spazio-temporale. In Italia un esempio di rete sismica di dimensione regionale è rappresentata dalla rete ISNet (Irpinia Seismic Network) dislocata lungo l’Appennino campano-lucano. Figura 1.1 Geometria della rete sismica ISNet. 2
La maggior parte dei terremoti che scuotono la Terra ogni anno sono così deboli da essere registrati solo dai sismografi, mentre altri, seppur pochi, hanno conseguenze catastrofiche. Il 90% di essi si origina dallo scorrimento relativo tra placche continentali mentre il restante 10% da fenomeni naturali come eruzioni vulcaniche o maree e artificiali come esplosioni o rumori legati all’attività industriale. In base alla teoria della tettonica a zolle, la litosfera, che comprende la crosta terrestre e la parte più esterna del mantello, è suddivisa in placche tettoniche che possono spostarsi sulla sottostante astenosfera, collidendo, scorrendo o allontanandosi l’una rispetto all’altra. Per comprendere l’origine di un sisma legata ai moti delle placche è possibile ricorrere al “modello del rimbalzo elastico” proposto da H.F.Reid a seguito del terremoto di San Francisco del 1906. In base ad esso, quando due placche scorrono, il loro movimento non è continuo a causa dell’attrito statico tra le rocce; questo comporta l’accumulo di energia elastica in esse che cresce nel tempo fino a quando non si giunge al punto di rottura, in corrispondenza del quale la roccia si frattura, creando una spaccatura nota come faglia e liberando bruscamente tutta l’energia immagazzinata. Una parte di essa si trasforma in energia termica dissipandosi sotto forma di calore, mentre un’altra parte viaggia attraverso la Terra come onde sismiche che giunte in superficie provocano uno scuotimento del suolo. Inoltre, studiando i tempi di arrivo di queste onde sulla superficie terrestre, in corrispondenza delle stazioni sismiche, è possibile ricavare informazioni relative alla struttura interna della Terra. Figura 1.2 – Modello del rimbalzo elastico per un terremoto: a) assenza di tensione tra i due blocchi di roccia adiacenti; b) accumulo di tensione nei pressi della faglia con conseguente deformazione delle rocce a causa del moto relativo tra i due blocchi adiacenti; c) “rimbalzo” e conseguente rilascio di energia. 1.1.1 Sorgente sismica e magnitudo Nonostante un terremoto produca una rottura macroscopica della lunghezza anche di alcuni chilometri, per un osservatore molto lontano (già a partire da 100 km) dal luogo di origine del sisma, esso appare come un evento puntiforme. Il punto il cui si realizza la rottura è detto ipocentro e, a seconda della profondità a cui esso è posto rispetto alla superficie terrestre, è possibile classificare i terremoti in superficiali o profondi. La proiezione dell’ipocentro sulla superficie terrestre è detta epicentro. 3
Figura 1.3 – Ipocentro ed epicentro di un terremoto. Le dimensioni della sorgente di emissione delle onde sismiche sono fondamentali per ottenere informazioni circa la grandezza di un terremoto. Essa viene misurata tramite il momento sismico, la magnitudo o l’intensità macrosismica. Quest’ultima si ottiene analizzando i danni provocati da un terremoto, mentre magnitudo e momento sismico vengono calcolati a partire dai segnali sismici registrati. Grandi terremoti producono notevoli danni alle architetture erette dall’uomo; quest’osservazione spinse nel XVIII secolo Domenico Pignataro, un fisico italiano, a classificare,per la prima volta, più di 1000 terremoti in base ai loro effetti distruttivi su case ed edifici. Nel ‘900 fu un altro italiano, G. Mercalli, a proporre una scala con ben 12 gradi differenti di intensità sismica ancora basata sugli effetti prodotti da un terremoto, la quale è tutt’oggi utilizzata anche se con qualche piccola modifica in relazione alla qualità delle costruzioni interessate dal sisma. Si tratta di una classificazione molto soggettiva dell’intensità di un terremoto e fortemente dipendente dal grado di insediamento umano. Nel 1935 C.F.Richter introdusse il concetto di magnitudo che permette di descrivere quantitativamente la grandezza di un terremoto. La magnitudo è calcolata a partire dall’ampiezza di oscillazione del suolo prodotta dal terremoto e registrata dai sismografi ad una distanza nota dall’epicentro. La magnitudo superficiale , basata sulla componente verticale del moto del suolo, è definita come: = log10 ( ) + 1,66 log10 (∆) + 3,3 (1.1) dove è la componente verticale del moto del suolo espressa in micrometri (μm), Δ la distanza epicentrale in ° (20°≤ Δ ≤ 160°), T il periodo dell’onda (18-22 secondi), inoltre la profondità dell’ipocentro deve essere inferiore ai 50 km. La magnitudo delle onde di volume, non dipendenti dalla profondità a cui si realizza la frattura, è definita come: = log10 ( ) + (∆, ℎ) (1.2) 4
in cui è la massima ampiezza del moto del suolo legata alle onde di tipo P aventi un periodo inferiore ai 3s, Q è un fattore di correzione empirico che tiene conto dell’attenuazione dovuta alla distanza epicentrale Δ e alla profondità h. Per uno stesso terremoto i valori di e non coincidono, fatta eccezione per piccoli terremoti. Ciò è dovuto ad una differente risposta del suolo all’evento sismico e ad una differente dipendenza dalla frequenza dell’ampiezza delle onde di volume e di quelle di superficie. Inoltre, sia la magnitudo superficiale che quella delle onde di volume esibiscono una saturazione in corrispondenza di terremoti di una certa grandezza. A partire dai valori di =6 e =8 tutti i terremoti presentano la stessa magnitudo, sottostimando l’energia liberata. La definizione di momento sismico 0 si basa sull’area S della frattura che produce il terremoto, sul modulo di rigidità μ delle rocce lungo la faglia e sullo spostamento relativo D lungo essa. La dipendenza di 0 da questi parametri è descritta dalla relazione: 0 = (1.3) Dal momento sismico si definisce la magnitudo momento come: 2 = (log10 0 − 9.1) (1.4) 3 Quest’ultima viene ad oggi preferita alla magnitudo superficiale a causa dei problemi di saturazione che esibisce in corrispondenza di grandi terremoti ( ≈8). 1.1.2 Contenuto in frequenza dei segnali sismici Le onde sismiche vengono prodotte da differenti sorgenti che possono essere interne o esterne alla Terra. Lo spettro di emissione di un fenomeno sismico è piuttosto ampio e va da frequenze dell’ordine di 10−5 tipiche delle maree a frequenze di 103 caratteristiche delle vibrazioni industriali. A seguito di un evento di frattura le onde sismiche di volume prodotte hanno un periodo compreso tra 0,01 e 50 secondi (onde P e S) mentre per quelle superficiali è tra 10 e 350 secondi (onde di Rayleigh e di Love). Nonostante lo spettro sia ampio, per un terremoto, esso presenta un picco in corrispondenza di una frequenza caratteristica nota come frequenza d’angolo. Si osserva che quanto più grande è il terremoto tanto più piccola è la frequenza d’angolo, arrivando a frequenze di 10−4 per terremoti di magnitudo superiore a 8. 5
Figura 1.4 – Frequenza dominante del segnale emesso da un terremoto in funzione del momento sismico. La curva di risposta dei sismometri determina la banda di frequenze osservabile dei segnali sismici di un terremoto ed è fondamentale per poter ottenere informazioni riguardo le proprietà del mezzo di propagazione e della sorgente sismica. Misurando la frequenza d’angolo del segnale sismico si può infatti sperare di ricavare una stima delle dimensioni della faglia che lo ha originato; non sempre un’operazione del genere è realizzabile a causa delle attenuazioni che l’onda subisce nel propagarsi all’interno della Terra. Tuttavia, è grazie a queste variazioni che è possibile descrivere la struttura interna del pianeta ed evidenziare eventuali anomalie. In tal senso esiste un’ulteriore relazione che lega frequenza del segnale e lunghezza d’onda λ dello stesso, data da: = (1.5) con c velocità dell’onda nel mezzo. Se le dimensioni lineari dell’anomalia L sono molto più grandi di λ allora l’onda attraversa la regione anomala subendo delle variazioni in traiettoria, velocità e ampiezza. Al contrario se
garantendo la completa ricostruzione del vettore spostamento, accelerazione o velocità del suolo. Date le caratteristiche eterogenee dell’interno della Terra, le onde sismiche che vi si propagano vanno incontro a fenomeni ottici quali la rifrazione, la riflessione e la diffrazione. Le onde che ne risultano presentano un’ampiezza fortemente dipendente dalle caratteristiche elastiche delle regioni attraversate e questo consente, se si conoscono le proprietà del segnale, di poter ricavare informazioni sulle caratteristiche del sottosuolo. Una sorgente sismica genera differenti tipologie di onde che viaggiando a velocità diverse e vengono per tal motivo registrate dai sismometri ad istanti diversi. In particolare a seguito delle onde P, il sismogramma rivela il sopraggiungere di onde trasversali (S), a cui seguono quelle di superficie che possono a loro volta esser distinte in onde di Rayleigh (polarizzazione nel piano verticale) e onde di Love (polarizzazione nel piano orizzontale). Sebbene la loro identificazione sul sismogramma non dovrebbe essere un problema, dal momento che hanno diversi tempi di arrivo, talvolta potrebbe diventarlo a causa delle numerose sorgenti di rumore sismico. La velocità con cui queste tipologie di onde si propagano comporta che la loro separazione sul sismogramma diventa tanto più evidente quanto maggiore è la distanza epicentrale. Figura 1.5 - Sismogramma del terremoto di Sichuan (Cina) del 12 Ottobre 2008, = 7,9, registrato a Satriano dalla rete sismica ISNet mediante un sensore tri-assiale broad-band. Da esso si nota la variabilità nel tempo contenuto in frequenza associata agli arrivi delle differenti onde sismiche. Da essa le registrazioni dei terremoti possono essere classificate come segue: Distanze locali, ossia distanze dall’epicentro minori di 100km. In questo caso si ha una netta separazione tra onde P ed S emesse dalla sorgente e che si propagano nella crosta; 7
Distanze regionali, con distanza epicentrale compresa tra 100km e 1400km; in corrispondenza di esse i sismometri registrano fasi sismiche riflesse e/o rifratte lungo la discontinuità crosta- mantello; Distanze mantello-superiore, con distanza dall’epicentro compresa tra 1400km e 3300km; a tali distanze i grafici ottenuti dalla registrazione del moto del suolo presentano prevalentemente onde che hanno attraversato regioni della Terra con una complessa distribuzione in velocità; Distanze telesismiche, con Δ > 3300km; in questo caso i sismogrammi, fatta eccezione per distanze epicentrali comprese tra 30° e 95°, sono piuttosto complessi. Da poco più di 30 anni, di notevole interesse per i sismologi sono le registrazioni accelerometriche. L’importanza ad esse associata venne intuita nel 1968 dal sismologo giapponese Aki, il quale dimostrò che era possibile ottenere l’andamento temporale della velocità di dislocazione attraverso la doppia integrazione del segnale accelerometrico registrato nei pressi della faglia. Gli accelerometri sono strumenti in grado di individuare le ampiezze dei segnali prodotti da grandi terremoti, anche a breve distanza, grazie alla loro sensibilità ad un ampio spettro di frequenze. Nonostante la capacità degli accelerometri di fornire un gran numero di informazioni circa le caratteristiche della sorgente, numerosi sono gli effetti di propagazione indesiderati che compaiono nelle registrazioni e che necessitano di essere corretti attraverso l’adozione di complessi metodi numerici. 1.2 Teoria dell’elasticità: sforzo e deformazione La descrizione del comportamento di un materiale sottoposto, per un certo intervallo temporale, a delle sollecitazioni è fondamentale per lo studio della propagazione delle onde sismiche. Quando un corpo risente dell’azione di una forza, esso subisce una deformazione e può tornare o meno nella configurazione di partenza quando la forza viene rimossa, a seconda dell’intensità di quest’ultima; nel primo caso si parla di comportamento elastico mentre nel secondo di comportamento plastico. Un’onda sismica che si propaga in un mezzo produce uno spostamento, supposto continuo, delle sue particelle rispetto alla loro posizione di equilibrio. Le grandezze di sforzo e deformazione sono indispensabili per determinare un’equazione che possa descrivere questi spostamenti nelle ipotesi di: comportamento elastico del mezzo, piccole perturbazioni rispetto alla posizione di equilibrio e dipendenza lineare tra sforzo e deformazione. 1.2.1 Sforzo Lo sforzo (stress) è la grandezza fisica che descrive la forza applicata per unità di superficie. Lo sforzo risultate è variabile se la forza varia punto per punto. In questo caso esso può calcolarsi in un punto come: = lim (1.6) ∆ →0 ∆ 8
in cui F è la risultante delle forze agenti in un particolare punto e ΔS la superficie elementare. L’unità di misura per lo sforzo è il Pascal (1 = 1 −2 ). In base alla direzione della forza e della normale alla superficie è possibile distinguere: sforzo normale o pressione, in cui la forza è ortogonale alla superficie su cui è applicata; sforzo di taglio, se la forza è tangenziale alla superficie. Figura 1.6 - Scomposizione dello sforzo nelle sue componenti tangenziale e normale rispetto all’elemento di superficie ΔS. Qualora la forza fosse orientata in una direzione generica è comunque sempre possibile esprimerla in termini delle componenti di taglio e normale. Si consideri un cubo elementare con i tre spigoli orientati lungo gli assi di una terna cartesiana Oxyz. Figura 1.7 - Componenti cartesiane dello sforzo agente sulla faccia parallela al piano (y,z) di un cubetto elementare. Se , , sono gli sforzi agenti sulle facce del cubo ortogonali rispettivamente ai versori degli assi ̂ , ̂ , ̂ , allora in termini delle loro componenti cartesiane ( , = , , ) si può scrivere: 9
̂ + = ̂ + ̂ ̂ + = ̂ + ̂ (1.7) ̂ + = ̂ + ̂ Per ciascuna componente , il pedice indica la direzione della normale alla superficie su cui agisce la forza, mentre l’orientazione della componente di quest’ultima. Le forze agenti sulle facce opposte del cubo diventano uguali quando il suo volume tende a zero, riducendo a nove il numero delle componenti necessarie alla descrizione dello stato degli sforzi sul sistema. Tali componenti costituiscono gli elementi del tensore degli sforzi σ: 11 12 13 = ( 21 22 23 ) (1.8) 31 32 33 in cui sono state effettuate le sostituzioni: →1 →2 →3 Il tensore σ è simmetrico dal momento che = . Questo risultato, che riduce il numero di componenti indipendenti del tensore a sei, lo si ricava tenendo conto che in una condizione di equilibrio statico del cubetto il momento meccanico associato agli sforzi che agiscono sul sistema è nullo. 1.2.2 Deformazione Quando un corpo monodimensionale, una sbarretta ad esempio, è soggetto all’azione di una forza esso modifica le proprie dimensioni e la propria forma, ossia subisce una deformazione. Questa grandezza fisica è adimensionale e definita come il rapporto: ∆ (1.9) dove è la lunghezza del segmento non deformato mentre ∆ la variazione in lunghezza dovuta alla deformazione. Se si considera un punto P appartenente al materiale soggetto a deformazione, l’evoluzione temporale della sua posizione è descritta, in rappresentazione lagrangiana, dal vettore: ( ) = ⃗ − ⃗⃗⃗⃗0 (1.10) con ⃗ 0 = 01 ̂1 + 02 ̂2 + 03 ̂3 posizione del punto P all’istante iniziale = 0 e = 1 ̂1 + ̂2 + 3 2 ̂3 posizione all’istante > 0 . Tale rappresentazione equivale a scegliere un sistema di 10
riferimento cartesiano coincidente con la posizione iniziale del punto; ( ) può allora riscriversi in termini delle sue componenti in questo nuovo sistema come: ( ) = 1 ̂1 + 2 ̂2 + 3 ̂3 (1.11) Figura 1.8 - Evoluzione temporale della posizione del punto P tra gli istanti 0 e . Si consideri ora un punto posto a distanza da . A seguito della deformazione elastica subita dal materiale, essi passano dall’occupare le posizioni (iniziali a = 0 ) e alle posizioni ′ e ′ descritte dai vettori ⃗ e ⃗ . Analogamente a quanto prima fatto per P, l’evoluzione temporale della posizione di è data da: ( ) = ⃗ − ⃗⃗⃗⃗ 0 (1.12) 11
Figura 1.9 - Spostamento del punto Q tra la posizione iniziale individuata dal vettore 0 = 0 + e quella finale descritta da = + ′. Facendo riferimento alla figura 1.9 si ricava che: ( ) = ( ) + ( ) (1.13) in cui ( ) = 1 ̂1 + 2 ̂2 + 3 ̂3 e con ( =1,2,3) differenziali delle componenti dello spostamento ( ). Riscrivendo l’equazione (1.1) per ciascuna componente di ( ) si ricava il sistema di equazioni: 3 ( ) = ( ) + ∑ | (1.14) =1 con = 1,2,3. Fissata una coppia di indici e , ciascuna derivata può riscriversi in maniera equivalente nel seguente modo: 1 1 = ( − )+ ( + ) (1.15) 2 2 Sostituendo tale espressione nell’equazione 1.14 si ottiene: 3 1 1 ( ) = ( ) + [( × ) × ] + ∑ ( + ) (1.16) 2 2 =1 12
In tale espressione i primi due termini del secondo membro rappresentano una traslazione e una rotazione rigida, mentre il terzo descrive le deformazioni subite dal sistema. Infatti ciascun termine: 1 = ( + ) (1.17) 2 è un elemento del tensore simmetrico delle deformazioni infinitesime. Consideriamo ora il parallelepipedo in figura 1.10 e determiniamo l’equazione che fornisce il suo volume a seguito della deformazione. Figura 1.10 - Parallelepipedo di volume = 1 2 3 che subisce una deformazione nelle tre direzioni. A seguito dell’applicazione di una forza al parallelepipedo, la lunghezza di quest’ultimo nella direzione ̂ diventa: ′ = + (1.18) con = 1,2,3. Il volume deformato è allora: = ′1 ′2 ′3 = 1 (1 + 11 ) 2 (1 + 22 ) 3 (1 + 33 ) (1.19) da cui trascurando termini in di ordine superiore al primo, si ottiene in definitiva: ′ = + ∆ = (1 + ∆) (1.20) 13
dove ∆= ∇ ∙ = 11 + 22 + 33 costituisce la porzione di cui è variato il volume del parallelepipedo e si definisce dilatazione. 1.2.3 Legge di Hooke e parametri elastici La risposta dei vari materiali alle sollecitazioni è stata studiata per secoli da numerosi scienziati tra cui Robert Hooke, il quale riuscì a formulare un’equazione, poi denominata legge di Hooke, capace di descrivere la relazione lineare esistente tra sforzo e deformazione. La forma generale che caratterizza tale equazione tiene conto del tensore delle costanti elastiche che è legato ai due tensori e tramite l’espressione: = (1.21) In un mezzo anisotropo sfruttando le simmetrie di cui godono i tensori, il numero di costanti indipendenti si riduce a 21, mentre in uno elastico e isotropo (la Terra lo è in prima approssimazione) le costanti elastiche indipendenti sono soltanto 2 e sono anche note come costanti di Lamé λ e μ, aventi le dimensioni fisiche di uno sforzo. La legge di Hooke generalizzata può allora scriversi come segue: = ( 11 + 22 + 33 ) + 2 (1.22) Dalle costanti di Lamé è poi possibile definire una serie di altre costanti quali: Modulo di Young: (3 + 2 ) = (1.23) + esprime la propensione di un materiale a subire deformazioni lineari sotto dilatazioni o compressioni; Rapporto di Poisson: = (1.24) 2( + ) costituisce una stima del grado di restringimento o allargamento del materiale in presenza di una forza longitudinale. Modulo di incompressibilità: 2 = + (1.25) 3 14
tale grandezza descrive la capacità di un certo materiale di resistere a dei cambiamenti di volume dovuti a variazioni della pressione. Figura 1.11 - Relazione tra sforzo e deformazione. Una volta rimosso lo sforzo la deformazione si annulla; tuttavia, superato un certo valore dello sforzo, si entra in regime plastico. Incrementando ulteriormente lo sforzo si giunge al punto di rottura. 1.2.4 Equazione del moto in un mezzo elastico L’equazione dell’elastodinamica descrive il moto di una particella in un mezzo continuo elastico soggetto all’azione di una forza. Essa può essere ricavata considerando un parallelepipedo di dimensioni infinitesime 1 , 2 , 3 in equilibrio dinamico e in regime elastico. Affinché questo modello possa essere impiegato per il nostro scopo è necessario supporre che il parallelepipedo sia lontano dalla sorgente dello sforzo, non risentendo del suo contributo. Siano 11 , 12 , 13 gli sforzi che agiscono sulla faccia posteriore del parallelepipedo in base alla figura1.12, allora quelli agenti sulla faccia anteriore sono: 11 11 + 1 1 12 12 + 1 1 13 13 + 1 1 15
Figura 1.12 - Parallelepipedo elementare di dimensioni 1 , 2 , 3 in equilibrio dinamico su cui agisce, ortogonalmente alla faccia parallela al piano ( 2 , 3 ), lo sforzo 11 . Siccome forzi agenti su facce opposte hanno segno opposto, allora le componenti dello sforzo risultante sono: 11 12 13 1 ; 1 ; 1 1 1 1 A partire dagli sforzi agenti è possibile ricavare la forma delle forze ad essi associate; in particolare: 11 11 = 1 ( 1 2 ) = ′11 (1.26) 1 con volume del parallelepipedo e ′11 componente della forza per unità di volume associata allo sforzo 11 . Per le altre facce del cubo si ha: ′ = (1.27) In definitiva si giunge all’espressione per la risultante delle forze per unità di volume lungo la direzione 1 : ′ 1 = ′11 + ′21 + ′31 = ∇ ∙ 1 (1.28) in cui 1 = ( 11 , 21 , 31 ). Ricorrendo alla seconda legge della dinamica ′ 1 ≡ ′1 è scrivibile come: 16
′1 = 1 (1.29) ossia in termini della densità del materiale considerato e della componente lungo 1 dell’accelerazione indotta dall’applicazione della forza. Dal momento che: 2 1 11 21 31 1 = = + + (1.30) 2 1 2 3 e dalla legge di Hooke: 11 = ( 11 + 22 + 33 ) + 2 11 21 = 2 21 31 = 2 31 si ricava allora l’equazione: 2 1 ∆ 11 21 31 2 = + 2 + 2 + 2 (1.31) 1 1 2 3 tuttavia, tenendo conto dell’espressione delle componenti del tensore delle deformazioni: 1 1 2 1 1 3 1 11 = ; 21 = ( + ) ; 31 = ( + ) 1 2 1 2 2 1 3 l’equazione diventa: 2 1 ∆ 2 = ( + ) + ∇2 1 (1.32) 1 Si tratta dell’equazione dell’elastodinamica ricercata, che in forma vettoriale può scriversi come: 2 2 = ( + 2 )∇(∇ ∙ ) − (∇ × ∇ × ) (1.33) avendo sfruttato le proprietà dei due operatori ∆∇ e ∇2 . I due termini che compaiono al secondo membro dell’equazione sono rispettivamente irrotazionale e solenoidale. Essi, insieme, permettono di originare moti di polarizzazione qualunque. Si distinguono due casi limite: Campo di spostamento irrotazionale (∇ × = 0): 2 2 = ( + 2 )∇2 (1.34) 17
con = ∇ ( potenziale scalare di Helmholtz). Si tratta dell’equazione del moto per le onde Primarie (onde P) la quale descrive solo spostamenti che producono moti di compressione ma non moti trasversali. Figura 1.13 - Propagazione di un’onda primaria. Campo ssolenoidale(∇ ∙ = 0): 2 2 = μ∇2 (1.35) in questo caso si ottiene l’equazione del moto per la componente onda S dello spostamento. La corrispondente soluzione produce degli spostamenti trasversali nel mezzo, quindi ortogonali alla direzione di propagazione. Inoltre = ∇ × ( potenziale vettore di Helmholtz). Figura 1.14 - Propagazione di un’onda secondaria. Qualora l’equazione dell’elastodinamica non potesse esser ricondotta a uno di questi due casi limite, allora la soluzione deve essere ricavata usando i potenziali e di Helmholtz e sfruttando il teorema di Lamé ( = ∇ + ∇ × ). 1.2.5 Approssimazione di campo vicino e campo lontano per le onde P e S In un mezzo illimitato, omogeneo e isotropo è possibile ricavare una soluzione analitica per l’equazione dell’elastodinamica; essa è rappresentata da una funzione di Green, capace di descrivere lo spostamento prodotto dall’applicazione di una forza impulsiva e unidirezionale. Sia la posizione della sorgente (approssimabile a una delta di Dirac), a cui è applicata la forza all’istante 0 lungo la direzione p-esima, e x quella del ricevitore investito dall’onda al tempo t. La componente i-esima funzione di Green, ( , 0 ; , ), soddisfa l’equazione: 18
2 = ( − ) ( − 0 ) + ( ) (1.36) 2 con tensore delle costanti elastiche e densità del mezzo attraversato. Risolvendo l’equazione analiticamente si ottiene: ⁄ 1 1 = 3 ∫ ( − 0 − ) + 2 ( − ) 4 ⁄ 4 1 (1.37) + 2 ( − ) 4 +2 in cui = | − | , = √ , = √ . L’ampiezza dei tre termini al secondo membro dipende dalla distanza r tra osservatore e sorgente; mentre il primo domina a piccole distanze, poiché all’aumentare di quest’ultima diminuisce come −2 , gli altri due variano come −1 e quindi prevalgono a grandi valori di r. In virtù di ciò il primo termine è detto di campo vicino (CV), i restanti di campo lontano (CL); in particolare il secondo fa riferimento alle componenti onda P dello spostamento, il terzo alle onde S. Le costanti A che compaiono nell’equazione definiscono la polarizzazione dei tre addendi, attribuendo al primo una polarizzazione variabile, al secondo (onda P) una parallela alla direzione di propagazione e al terzo (onda S) una polarizzazione trasversale. Quando si ricava la soluzione di Green, la predominanza dei termini di campo lontano su quello di campo vicino e viceversa dipende non solo dalla distanza relativa tra sorgente e osservatore ma anche dalla lunghezza d’onda, , del segnale che viene prodotto dalla sorgente. In particolare, i termini CL dominano se la distanza r è maggiore di qualche lunghezza d’onda o equivalentemente se la distanza percorsa dall’onda è maggiore di . Il termine di campo vicino prevale se > , quindi per i terremoti, che vengono registrati a distanze molto maggiori di , esso è trascurabile. 19
Capitolo 2 Sorgente sismica e modellazione 2.1 La sorgente sismica nei segnali registrati Nel ricavare l’equazione dell’elastodinamica abbiamo supposto di essere sufficientemente lontani dal luogo di origine delle onde sismiche, così da poter trascurare il termine di sorgente, il quale è però necessario per una descrizione completa del moto d’onda. Per ricavare tale termine consideriamo un sisma prodotto da un processo di dislocazione lungo una faglia. Quest’ultima è una superficie che separa due blocchi di roccia, i quali, soggetti all’azione di sollecitazioni esterne, stanno per fratturarsi. Figura 2.1 – Volume V contente una faglia, , e con superficie esterna S. Il vettore n corrisponde alla normale alla faglia. Lungo la faglia ha luogo una discontinuità di spostamento rispetto a . Siano + e − i due lati della superficie di faglia; durante un processo di dislocazione, si realizza uno spostamento relativo tra i punti appartenenti alla superficie + e quelli di − . La funzione capace di descrivere tale spostamento e, di conseguenza, il processo di dislocazione associato ad una frattura sismica è la funzione sorgente definita come: + − ∆ ( , ) = ( , )| − ( , )| (2.1) Tale equazione presuppone che il processo di frattura abbia una dimensione spaziale e temporale ben definita. Grazie alla misura dei tempi di arrivo delle onde P e S sul sismogramma è possibile determinare la posizione del punto di nucleazione della frattura o ipocentro e l’istante in cui tale frattura è stata prodotta. Dall’ipocentro la dislocazione si propaga sulla faglia producendo un fronte, detto fronte di rottura, la cui velocità dipende dagli sforzi agenti e dalle proprietà dei materiali che caratterizzano i due lati della faglia. Una porzione dell’energia spesa nei processi di dislocazione viene rilasciata sottoforma di onde sismiche, la cui ampiezza dipende allora dalla funzione sorgente ∆ ( , ). Poiché l’ampiezza di dislocazione varia nel tempo e da punto a punto lungo la faglia, allora la determinazione delle dimensioni del processo di frattura richiede 20
l’informazione contenuta nell’intera forma d’onda, facendo però attenzione a separare gli effetti di sorgente, che siamo interessati a ricavare, da quelli di propagazione. La determinazione della funzione sorgente, essenziale per una descrizione completa del processo di frattura che genera un terremoto, può esser realizzata assimilando la Terra, al di fuori della regione sorgente, ad un filtro lineare e stazionario con stazionarietà limitata alla durata della propagazione delle onde sismiche. In questo modo i sismogrammi registrati, tenendo conto del contributo dello strumento di misura, appaiono come l’uscita di una cascata di filtri che modificano forma e ampiezza del segnale prodotto dalla sorgente. Siano ( ) e ( ) le funzioni che descrivono i filtri, lineari e indipendenti dal tempo, costituiti rispettivamente dalla Terra e dallo strumento di misura, allora, il sismogramma ( ) può essere ricavato attraverso un’operazione di convoluzione come: ( ) = ( ) ∗ ( ) ∗ ( ) (2.2) in cui ( ) è la funzione sorgente e rappresenta il segnale d’ingresso alla successione dei due filtri. Tale equazione è riferita ad un dominio temporale; eventualmente la si può riscrivere in funzione della frequenza ricorrendo al teorema di convoluzione come segue: ( ) = ( ) ( ) ( ) (2.3) Figura 2.2 – Ampiezza e forma del segnale prodotto dalla sorgente sismica vengono modificate a seguito del passaggio attraverso una catena di filtri lineari e stazionari. Il risultato finale lo si può osservare sul sismogramma. Poiché le sorgenti sismiche reali sono estese nello spazio e le registrazioni delle onde vengono condotte in differenti punti della superficie terrestre, allora l’equazione (2.2) dovrà esser riscritta tenendo conto della posizione del ricevitore e della sorgente : ( , ) = ( , ) ∗ ( , , ) ∗ ( , ) (2.4) In quest’ultima equazione la funzione elastodinamica di Green ( , , ) fornisce la risposta del filtro Terra al segnale prodotto da un processo di frattura. Si tratta di una funzione non facilmente ricavabile nelle applicazioni reali, se non con il ricorso a complessi metodi numerici, e che perciò si suppone, nello studio della sorgente sismica, esser nota a priori e calcolabile a partire dai parametri elastici del mezzo di propagazione.Talvolta i terremoti di magnitudo più piccola, se co- localizzati con la sorgente che si vuole caratterizzare, possono essere considerati come funzioni di Green empiriche. L’equazione(2.4) può essere utilizzata, se sono note le funzioni e , per ricavare la funzione sorgente , analizzando direttamente il sismogramma (conoscendo quindi la funzione ). Tale operazione richiede l’applicazione di una tecnica di deconvoluzione. 21
2.2 La deconvoluzione La deconvoluzione è un processo che permette di ottenere, a partire da un segnale “convoluto”, informazioni circa la natura del filtro o, come nel nostro caso, del segnale di ingresso prodotto dalla sorgente. Per comprendere in che modo realizzare quest’operazione partiamo dall’equazione: ( ) = ( ) ∗ ( ) (2.5) in cui ( ) e ( ) sono funzioni note, mentre ( ) è l’incognita. Si può passare nel dominio delle frequenze, in cui l’equazione è risolvibile più facilmente, attraverso il teorema di convoluzione, da cui: ( ) = ( ) ( ) (2.6) e quindi: ( ) ( ) = (2.7) ( ) Una volta ottenuta ( ), è possibile calcolare la sua anti trasformata di Fourier così da ricavare la funzione incognita ( ). Analogamente per segnali discreti si parte da un’equazione del tipo: = ( ∗ )∆ (2.8) per poi passare a: = ∆ (2.9) con = 0,1,2, … , − 1. In definitiva: = (2.10) ∆ da cui infine è possibile ottenere . Questo modo di procedere per la risoluzione del problema della deconvoluzione è noto come divisione spettrale e solo raramente trova applicazione pratica, a causa di una moltitudine di problemi. Primo fra essi è che il denominatore nell’equazione (2.7), per certe frequenze, potrebbe annullarsi; non permettendoci di definire correttamente ( ) e, di conseguenza, ricavare . Bisogna poi tener conto del rumore che produce un certo effetto nel segnale in output. Se si suppone che esso intervenga sul segnale d’ingresso prima della convoluzione, allora si ha: ( ) = ( ) ∗ ( ( ) + ( )) (2.11) applicando il metodo della divisione spettrale si ottiene: 22
( )
( ) + ( ) = (2.12)
( )
in questo caso non si ha un incremento del rumore rispetto a prima della deconvoluzione.
Se invece il rumore viene aggiunto a seguito della convoluzione del segnale d’ingresso, allora si ha:
( ) = ( ) ∗ ( ) + ( ) (2.13)
da cui, sempre attraverso la divisione spettrale:
( ) ( )
( ) + = (2.14)
( ) ( )
E’ora evidente come per valori piccoli, non nulli, della funzione ( ), il rumore è fortemente
incrementato dal processo di deconvoluzione. Tale problema può esser risolto attraverso una
regolarizzazione di quest’ultima, la quale consiste in una variazione del denominatore
nell’equazione (2.10), atta ad evitare una divisione per zero. Si potrebbe pensare di riscrivere
l’equazione (2.10) come:
= (2.15)
( + )∆
con numero reale piccolo. Tuttavia se = − , allora il denominatore sarebbe di nuovo nullo.
Si ricorre allora ad un metodo noto come “water level regularization”. Esso consiste nel fissare un
valore limite alla pulsazione associata alla frequenza del segnale, così da modificare il
denominatore solo nel caso in cui | ( )| è piccolo, ossia solo quando | ( )| < . In tale
situazione si procede con la sostituzione:
( )
̂ ( ) = (2.16)
| ( )|
se ( ) ≠ 0, oppure:
( ) = (2.17)
se ( ) = 0.
Quindi per tempi discreti, lo schema“water level regularization” ci consente di ottenere:
̂ =
(2.18)
̂ ∆
dove:
| | >
̂ = 0 < | | ≤ (2.19)
| |
{ = 0
23Infine, affinché questo metodo funzioni è indispensabile che ∆ sia più grande di | |, modulo della trasformata di Fourier del rumore in corrispondenza della frequenza k. 2.3 La retro-propagazione La retro-propagazione delle registrazioni di spostamenti ad elevata frequenza è una tecnica che permette di ottenere le immagini della dislocazione (la discontinuità di spostamento) che si realizza lungo il piano di faglia durante il processo di frattura che genera un terremoto. In generale, l’ampiezza associata alla dislocazione è ottenuta applicando il teorema di rappresentazione, grazie al quale è possibile esprimere lo spostamento del moto del suolo ( , ), in un qualunque punto del mezzo, in funzione della dislocazione lungo la faglia : ∞ ( , − ; , 0) ( , ) = ∫ ∫ ( , ) (2.16) −∞ in cui c è il tensore dei coefficienti elastici, n la normale a e la funzione di Green. Essendo interessati alla dislocazione che si genera lungo il piano della faglia , l’equazione (2.16) va invertita. Ovviamente quest’operazione richiede la conoscenza della funzione di Green; in particolare, quando una rete sismica è in grado di determinare con precisione la posizione e i meccanismi di faglia associati alle scosse di assestamento (aftershocks), la funzione può essere ricavata empiricamente a partire dai microsismi che hanno le stesse proprietà geometriche dell’evento principale. Inoltre, la conoscenza di tale funzione consente di separare gli effetti di sorgente da quelli di propagazione. Nell’approssimazione di campo lontano, in corrispondenza di alte frequenze, l’equazione (2.16) può esser ricondotta ad un integrale di linea se si ipotizza che lo scorrimento raggiunge il suo valore finale istantaneamente. Per un mezzo stratificato orizzontalmente, si ha infatti: ( , ) ( , ) = ∫ ( ) ( , , ) (2.17) ℒ ( , ) dove l’apice c descrive una fase sismica, è la diffusione geometrica, è il modello di radiazione e una costante definita come: = (2.18) 4 √ 0 05 con valore complesso, , 0 , , 0 densità e velocità alla sorgente e al ricevitore. Il contributo tiene conto dell’effetto Doppler e ha forma: (2.19) 24
− = − cos( ) in cui è la velocità di rottura e l’angolo che si forma tra la direzione del punto vista dall’ipocentro e la direzione dell’osservatore , vista da . Consideriamo la fase P o S di un piccolo evento come funzione di Green empirica, uniforme per la frattura. Allora l’integrale (2.17) si riconduce a: ( , ) = ∗ ∫ ( ) (2.20) ℒ Il cammino di integrazione è una curva ℒ ( ), nota come isocrona. Se è il tempo impiegato da un’onda P o S a percorrere la distanza che separa la sorgente dal ricevitore e , il tempo di rottura, ossia l’intervallo temporale impiegato dal fronte di rottura per raggiungere la posizione a partire dall’ipocentro, allora tutti i punti dell’isocrona verificano la relazione: ( , ) + ( ) = (2.21) Una mappa delle isocrone può esser ottenuta se si conosce la velocità di rottura. Il teorema dell’isocrona evidenzia che l’ampiezza del segnale, registrato sul sismogramma ad un dato istante t, si ottiene come somma dei contributi sulla corrispondente isocrona. Tuttavia, in presenza di un unico ricevitore, non si è in grado di determinare quale di questi contributi sia l’effettivo responsabile della dislocazione. Intersecando invece le informazioni provenienti da differenti osservatori, si ottiene una migliore risoluzione, in virtù del fatto che le mappe delle isocrone, ad essi associate, consentono di esplorare il piano di faglia seguendo differenti percorsi e garantendo quindi una migliore ricostruzione dell’immagine della dislocazione. La deconvoluzione dello spostamento registrato per la funzione di Green empirica, infine consente di ottenere la funzione sorgente apparente, ovvero la funzione sorgente vista da un dato ricevitore: ( ) = ∫ ( ) (2.22) ℒ Siccome la funzione di dislocazionenon è nota a priori, allora si assume che lo scorrimento sia uniforme lungo l’isocrona ( ). La funzione di dislocazione ( ) vista dal j-esimo osservatore è: ( ) ( ) = (2.23) in cui il denominatore è la lunghezza dell’isocrona a quell’istante di tempo. Se si considera il contributo di tutte le N stazioni sismiche, la mappa di dislocazione, che conclude l’applicazione del metodo, è: 25
( ) = ∑ ( ) (2.24) =1 con pesi associati a ciascuna funzione di dislocazione ( ), che tengono conto della qualità del segnale rispetto al rumore. La faglia può essere discretizzata suddividendola in sottofaglie, in cui si assume che la dislocazione sia uniforme. Ciascuna di esse risulta esser attraversata da più di un’isocrona e deve avere delle dimensioni tali da apparire all’osservatore come una sorgente puntiforme. Secondo tale schema, lo scorrimento è dato dalla media dei contributi dei punti all’interno di ogni sottofaglia e, in analogia all’equazione (2.26), la mappa complessiva dello scorrimento può esser ricavata come somma pesata delle singole funzioni di scorrimento. Nel realizzare la retro-propagazione è necessario tener sotto controllo il termine . Infatti per piccoli valori di esso, si potrebbero generare delle instabilità, in corrispondenza di rumori rilevanti per il segnale o si potrebbe avere una riduzione della lunghezza apparente dell’isocrona. Per evitare questi problemi si realizza una regolarizzazione della soluzione e si evita la retro- propagazione degli spostamenti quando il pattern dell’onda cambia segno lungo l’isocrona. 26
Capitolo 3 Applicazioni del processo di deconvoluzione 3.1 Analisi della deconvoluzione su segnali sintetici Analizziamo un esempio applicativo del processo di deconvoluzione trattato nel precedente capitolo, osservando in particolare come, in alcuni casi, la presenza di una sorgente di rumore, seppur piccola, necessita dell’applicazione della “water level regularization”. Supponiamo di effettuare dei campionamenti dei segnali ad intervalli di ∆ = 0,01s per 10 s. Il segnale di input è: ( ) = − (3.1) Figura 3.1 – Funzione ( ). e la funzione di Green considerata: ( ) = −5 sin 10 (3.2) 27
Figura 3.2 – Funzione ( ). Il segnale osservato in output è la convoluzione delle due precedenti funzioni così come riportato nell’equazione (2.5). Si ricava da essa la seguente rappresentazione grafica: Figura 3.3 – Grafico della convoluzione tra le funzioni ( ) e ( ). In assenza di rumore, qualora il segnale di ingresso non fosse noto, è possibile applicare il metodo della divisione spettrale per risolvere il problema della deconvoluzione nel dominio delle frequenze e ricavare l’espressione della funzione ( ) a partire da ( ) e ( ). Il grafico che si ottiene per ( ) è esattamente identico a quello in figura 3.1 (ovviamente è anche possibile ricavare ( ), se essa è l’incognita, dalle altre 2 funzioni). Supponiamo, invece, che il segnale ( ) sia “sporcato” da un rumore più piccolo rispetto ad esso di un fattore 10−4 . La funzione in uscita che ne deriva è allora: 28
( ) = ( )[1 + 0.0001 ( )] (3.3) Dove ran(t) è un numero casuale tra -0.5 e 0.5. Ne risulta il grafico: Figura 3.4 – Grafico della funzione ( ) in presenza di rumore. In questo caso, risolvendo la deconvoluzione con il metodo della divisione spettrale e graficando la funzione inversa della trasformata di Fourier relativa rapporto minv(t) che ne deriva, si ottiene un notevole incremento del rumore: Figura 3.5 – Incremento del rumore nel segnale ( ) dovuto all’applicazione della divisione spettrale (nero) confrontato con la funzione ( ) della precedente figura(rosso). 29
Per migliorare il risultato ottenuto e sperare di ricostruire il più fedelmente possibile l’andamento della funzione ( ), obiettivo del processo di deconvoluzione, si può allora ricorrere alla water level regularization. Tale tecnica consente di ridurre il rumore fissando un valore limite e confrontandolo con la funzione | ( )|, così come descritto nel capitolo 2. In particolare è indispensabile che la quantità ∆ sia molto più grande del rumore; tenendo conto che ∆ = 0,01 e il rumore è dell’ordine di 10−4 , rispetto al segnale di ingresso, allora, un buon risultato si ha per ≥ 1. Figura 3.6 – Funzione ( ) ottenuta con l’applicazione della water level regularization, in cui = 0,1. Figura 3.7 – Water level solution per = 1,0. 30
Figura 3.8 – water level solution per = 5,0. Figura 3.9 – water level solution per = 10,0 Come ci aspettavamo al crescere di si ha un progressivo miglioramento della soluzione. Si osserva però un effetto di bordo, nel caso = 10. Lo stesso procedimento di risoluzione del problema della deconvoluzione può essere seguito scegliendo un differente segnale d’ingresso, ad esempio triangolare, che è più simile alla forma teorica di una funzione sorgente. 31
Figura 3.10 – Segnale triangolare d’ingresso che si vuole ricavare con la deconvoluzione. Adottando la stessa funzione di Green (figura 3.2) e introducendo lo stesso rumore del caso precedente, si ottiene il grafico della convoluzione con e senza rumore: Figura 3.11 – Convoluzione con rumore (a destra) e senza (a sinistra), tra il segnale triangolare d’ingresso e la funzione di Green ( ). Avendo semplicemente sostituito la funzione d’ingresso esponenziale con un nuovo segnale d’ingresso triangolare, ci aspettiamo, anche in questo caso, che la divisione spettrale fallisca. 32
Figura 3.12 – Divisione spettrale nel tentativo di ottenere il segnale triangolare di ingresso. Se si applica la water level regularization i risultati sono nettamente migliori a partire da = 1,0. Figura 3.13 – water level solution con = 0,1. 33
Figura 3.14 – water level solution con = 1,0. Figura 3.15 – water level solution con = 5,0. Al crescere del valore di , l’effetto del rumore viene attenuato ma la funzione perde la positività ed il suo profilo risulta più liscio di quello della funzione originaria. 34
Figura 3.16 – water level regularization = 10,0. La water level regularization sebbene appaia come un tecnica infallibile per la risoluzione del problema della deconvoluzione dei segnali sintetici, fornendo una funzione sorgente quasi completamente “spoglia” da qualsiasi forma di rumore, non altrettanto lo si può dire per quelli reali, così come è possibile chiarire con il seguente esempio. Consideriamo un sismogramma relativo ad un evento di magnitudo 3. Partendo dalla porzione dei segnale di durata 5s che inizia 1s prima dell’onda S (Figura 3.17), restringiamo la registrazione ad una durata di 1s (tra il secondo 14 e 15 del grafico sottostante): si vede infatti che l’onda S diretta è seguita da ulteriori fasi, la cui presenza incide sul processo di deconvoluzione. Il tempo di campionamento è ∆ = 0,008 . Figura 3.17 – Segnale reale dal quale si vuole ricavare, attraverso la deconvoluzione, la funzione sorgente. 35
Come funzione di Green è possibile utilizzare il seguente segnale di un piccolo terremoto di magnitudo 1.1 co-localizzato con il precedente. Figura 3.18 – Funzione di Green empirica. Limitandoci a considerare le ampiezze dei due segnali, la funzione di Green e la funzione “main”, nell’intervallo temporale di 1 secondo (durata della fase S), è possibile in esso calcolare le trasformate di Fourier delle funzioni e quindi provare a risolvere la deconvoluzione con la divisione spettrale. Il risultato che si ricava è deludente (il segnale è dominato dal rumore) e quindi, come per i segnali sintetici, è necessario il ricorso alla water level regularization. Figura 3.19 – Funzione sorgente ottenuta con la divisione spettrale. 36
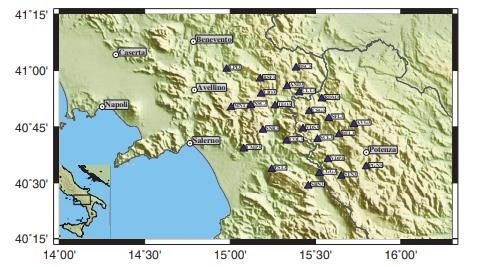
La difficoltà nell’applicazione di questa tecnica nel caso di segnali reali, come quelli considerati, è la ricerca del corretto valore del parametro . Esso deve essere una frazione del massimo della funzione| ( )|, trasformata di Fourier della funzione di Green empirica e al tempo stesso verificare la condizione ∆ ≫ | |. Dal momento che: | | ≈ 4 ∙ 104 (3.4) le analisi condotte hanno rivelato che un buon risultato lo si ottiene a partire da > 104 . Figura 3.20 – Confronto tra la funzione sorgente ricavata con = 10 (nero) e quella ottenuta per = 2 ∙ 104 (rosso). E’ evidente dal grafico come, anche per valori di molto grandi, non si riesce a ricavare un unico picco, come nel caso dei segnali sintetici, ma la presenza delle fasi successive a quella dell’onda S produce delle oscillazioni (presenti a partire, all’incirca, dall’istante 0,2 ) che seppure piccole intervengono nel processo di deconvoluzione “sporcando” la funzione sorgente. 3.2 Retro-propagazione applicata al terremoto di Benevento (27.09.12) L’obiettivo di questa sezione conclusiva è quello di ricostruire la mappa di dislocazione associata al terremoto di Benevento del 27 Settembre 2012, di magnitudo M 4.1, attraverso la tecnica della retro-propagazione descritta nel capitolo 2 e quindi ottenere la migliore stima della velocità di rottura associata al terremoto. I dati utilizzati per condurre un’analisi di questo tipo sono stati raccolti da tre differenti reti sismiche: RAN (National Strong Motion Network), RSNC (Centralized National Seismic Network) e 37
ISNet (Irpinia Seismic Network), per un totale di 33 stazioni collocate a meno di 100km dall’epicentro, posto, a 10km a Est di Benevento. Figura 3.21 – Mappa delle stazioni sismiche che hanno registrato l’evento di interesse. L’evento principale è avvenuto all’interno di una sequenzadi 40 eventi con momento sismico compreso tra 4.1 (evento principale di cui vogliamo studiare la dislocazione) e 1.3; divisi in due cluster (A e B), distanti l’uno dall’altro 2km in orizzontale e 1km in verticale e posti ad una profondità superiore ai 18km (A) e tra 16km e 18km (B). Per l’evento principale, i segnali osservati, perciascuna stazione, sono stati corretti rispetto alla riposta dello strumento e deconvoluti per il segnale di un evento più piccolo per ricostruire le funzioni sorgente. Infine è stato ottenuto un catalogo di 8 funzioni sorgente alle stazioni più prossime. La retro propagazione richiede la costruzione della mappa delle isocrone, la quale dipende oltre che dalle proprietà del mezzo attraversato dalle onde, che supponiamo note, anche dalla velocità di rottura, che non conosciamo e vogliamo stimare. La velocità di rottura più essere ottenuta attraverso un processo di ottimizzazione. Assumendo che la velocità di rottura sia costante, e fissato un intervallo di variazione esi esplorano valori per questo intervallo. Per ogni valore di velocità di rottura si calcola la mappa retropropagata e da questa si calcolano le funzioni apparenti sintetiche. Si sceglie infine quel valore di velocità di rottura per cui le funzioni sorgenti sintetiche si avvicinano di più a quelle del catalogo, misurando la similarità attraverso una norma L2. 38
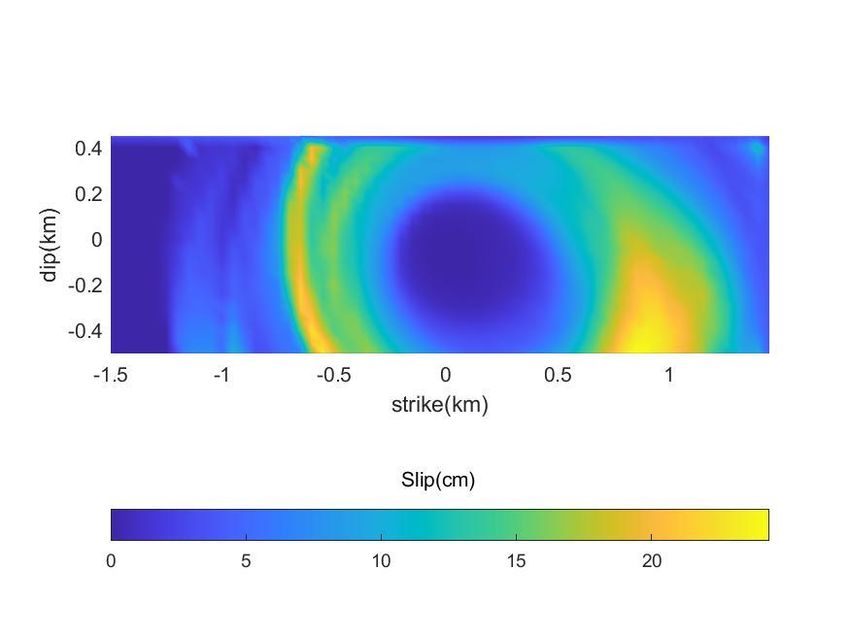
Figura 3.22 – Differenza tra funzione sorgente sintetica (rosso) e ottenuta tramite deconvoluzione (blu), ricavata da due differenti stazioni, tra le più prossime all’evento, della rete sismica utilizzata. Le analisi condotte hanno rivelato che la velocità di rottura per il terremoto considerato è di 2.1 / , valore questo che minimizza la differenza tra le funzioni sorgente sintetica e da catalogo. In figura 3.21 sono mostrati i confronti per due stazioni; la mappa finale di dislocazione sulla faglia che ha generato il terremoto è mostrata in figura 3.23. Figura 3.23 – Momento sismico in funzione della profondità Si osserva che la dislocazione è maggiore a profondità maggiori e tende a distribuirsi in due fasce verticali. Questo effetto di defocalizzazione è dovuto alla distribuzione delle stazioni e alla geometria del piano di faglia, per cui le isocrone campionano sempre le stesse regioni, indipendentemente dalla stazione. Di conseguenza, non si riesce a distinguere lungo questa zona quale regione abbia prodotto effettivamente la dislocazione, sebbene l’ampiezza della dislocazione sia maggiore nella regione sottostante l’ipocentro. 39
Puoi anche leggere