ITS e veicoli innovativi per il trasporto privato - Docente: Cino Bifulco Università degli Studi di Napoli Federico II - SIDT
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
1st SUMMER SCHOOL SIDT UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO (SA) Mercoledì 5 – Mercoledì 12 Settembre 2018 ITS e veicoli innovativi per il trasporto privato Docente: Cino Bifulco Università degli Studi di Napoli Federico II 12 settembre 2018
ITS: Intelligent Transportation Systems • Affrontare le sfide della mobilità • Ottimizzare deflusso e capacità dei rami • Aumentare l’efficienza delle reti di traffico e della sosta • Promuovere l’uso razionale dei modi di trasporto • Migliorare accessibilità di territori ed attività urbane/economiche • Incrementare la sicurezza nei sistemi di trasporto • Assicurare una mobilità sostenibilità • Dotando veicoli, infrastrutture e sistemi di gestione/esercizio di • Sistemi ICT • Spiccata capacità di adattamento dinamico del sistema rispetto ai cambiamenti di stato • Intelligenza cognitiva • Intelligenza decisionale UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018

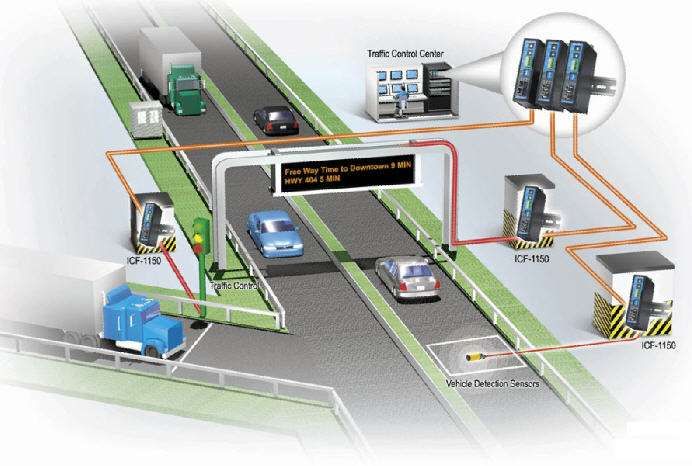
Esempi • Perché le soluzioni tecnologiche? • Quali sono i problemi che risolvono? •Vehicle Diagnostics •Traffic signal priority •GPS and Vehicle ID •Smart Card Reader, automated fare collection and passenger counting •… UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Esempi • Quali sono i problemi risolti? • Quali le applicazioni di dominio? • Osservazione e caratterizzazione dei parametri del deflusso • Identificazione di condizioni di deflusso, tempi di percorrenza e livelli di servizio • Identificazione (e gestione) degli incidenti e delle anomalie • Informazioni in tempo reale e re-routing •… UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018

Classificazione dei sistemi ITS Proposte non univoche L’applicazione ITS Propagazione del ha effetto su flusso Adaptive Traffic Management Systems Scelte di viaggio (es.: scelte di Advanced Traveler percorso, re-routing) Information Systems Scelte di guida (comportamento al Advanced Driving Connected and volante) Assistance Vehicles Automated Systems Scelte di mobilità (es.: scelta modale) Advanced Travel Mobility as a Service Demand Management UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Classificazione dei sistemi ITS Piano Nazionale d’Azione per gli ITS (adozione con D. M. 12 febbraio 2014, n. 44 del MIT) • TMS (Traffic Monitorig Systems) • NMS (Network Monitoring Systems) • AVM (Automatic Vehicle Monitoring) & AVL (Automatic Vehicle Location) • ATIS (Advanced Traveller Information Systems) • ATMS (Advanced Traffic Management Systems) • ATDM (Advanced Traveler Demand Management Systems) • ADAS (Advanced Driving Asssitance Systems) & cooperative-ADAS • ATFLS (Advanced Freight Transport and Logistic Systems) • ECS (Emergency Call System) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
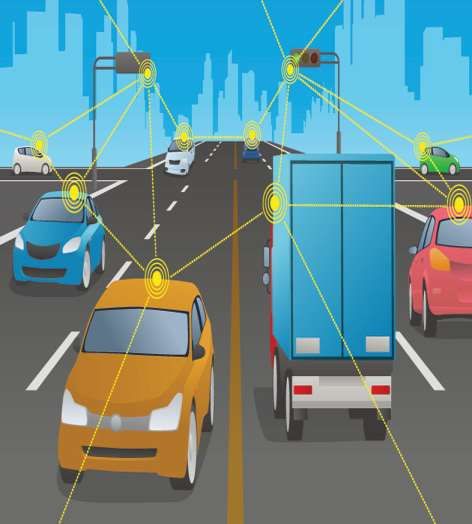
Da ITS a C-ITS • Cooperative-ITS (piattaforma europea) https://ec.europa.eu/transport/themes/its/c-its_en Declinazione soluzioni ATMS e ADAS (principalmente) abilitata dalle comunicazioni V2X • V2V = vehicle-to-vehicle • V2I = vehicle-to-infrastructure • Allo stato basato su comunicazioni DSRC (Dedicated Short Range Communication, ETSI-G5) • Implementazione specializzata di standard Wi-Fi (802.11p) • Su banda telecomunicazioni «libera» (non concessa) • Si prospetta che nel giro di pochi anni possa essere basato sulla rete mobile 5G • Su banda telecomunicazioni «concessa» ai telcom provider UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018

C-ITS • Day 1 services (2019?) RSU • V2V • Emergency brake light V2I • Emergency vehicle OBU approaching V2V • Slow or stationary vehicle(s) OBU • Vehicle platooning • Weather conditions • V2I • Weather conditions • Road works warning • Green Light Optimal Speed Advisory (GLOSA) • In-vehicle signage and (variable) speed-limits • Shockwave Damping UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018

C-ITS • Day 1.5 services • V2V • Cooperative adaptive cruise control • Lane change assistance • Vulnerable Road user protection • Motorcycle Approaching Indication • Cooperative Collision Risk Warning • V2I • Information on fuelling & charging stations for alternative fuel vehicles • Loading zone management • Intersection collision management UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018

C-ITS • Strumenti-base per implementarli • CAM – Cooperative Awareness Messages informano sullo stato corrente del veicolo trasmittente (velocità, posizione, ecc.) • Messaggi a cadenza prefissata (1-10-100Hz) • Abilitano: Cooperative-ACC; lane change assistance; ecc. • DENM – Decentralised Environmental Notification Message informano su un evento che ha un potenziale impatto sulla sicurezza stradale • Messaggi «ad evento» • Abilitano informazioni su incidenti, lavori in corso, ecc. • SPAT/MAP – Signal Phase and Timing + strato descrittivo della geometria fisica della intersezione • Abilitano applicazioni di sicurezza/automazione alle intersezioni UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
C-ITS: Green Light Optimal Speed Advisory (GLOSA) • Alcuni sistemi in fase (pre)commerciale (Volvo, BMW, …) • Velocità da tenere per attraversare con il verde • Al semaforo rosso, tempo per il verde • Accoppiato con un sistema stop&go • Non è necessario che altri veicoli siano equipaggiati • Sufficiente V2I • Chi paga i costi di investimento? Quali vantaggi si ottengono? Ne vale la pena? UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Esempi C-ITS • Intersection collision warning/avoidance • Automatic vehicle platooning • EDA (Enhanced Driving Awareness) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Da ITS a C-ITS Es.: nuova generazione di Adaptive Traffic Management Systems • Oggi (ITS) • Osservazione dei flussi locali alla intersezione • Programmazione della rete bi-livello • Ottimizzazione locale dei parametri semaforici • Strategie di rete/area (euristiche subottimali, limiti previsionali sulla propagazione del flusso, difficoltà a prevedere le scelte di percorso • Domani (C-ITS) • Veicoli con comunicazione V2X • Sistemi di navigazione e controllo di bordo • Comunicazione dei percorsi programmati • Ottimizzazione precoce dei parametri semaforici (possibilità di previsione della propagazione del flusso e supporto all’ottimizzazione di rete) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Da ITS a C-ITS Es.: riconoscimento automatico dei segnali stradali • Oggi (ITS) • Domani (C-ITS) • Abilita la implementazione dinamica di soluzione ISA (Intelligent Speed Adaptation) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
DA ITS a C-ITS − • Shock Wave Dumping = − • Scenario 0 – no detection = 0 = 2000 = 180 = 30 4 Km = −13 /ℎ = 18 • Scenario 1 – ITS VMS 2 Km 4 Km • Dopo 9 minuti (2 Km coda) il problema è rilevato dai sensori • L’allarme è lanciato al pannello a messaggio variabile • Il flusso sulla main lane a valle della diversione diminuisce del 60% = 800, = 10 → ≅ −5 /ℎ → Spillback (9+25) = 34 min UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
DA ITS a C-ITS • Scenario 2.a – V2V (back) propagation • Per basse penetrazioni di mercato • Bassa probabilità di rilevare l’incidente all’istante t=0 (appena avviene) • Bassa probabilità di propagare all’indietro l’informazione Bassa probabilità di allontanare dal percorso i veicoli (equipaggiati) prima della diversione • Scenario 2.b – V2I (back) propagation • La penetrazione di mercato non influenza la propagazione all’indietro della informazione • Tutti i veicoli (equipaggiati) sono raggiunti dalla informazione e divergono Diverted flow Incoming flow Incoming density Istantaneous wave Time to spillback Market % (veic/h) (veic/h) (veic/Km) Speed (km/h) (m) 0% 0 2000 30 -13 18 10% 200 1800 27 -12 20 20% 400 1600 23 -10 24 30% 600 1400 20 -9 27 60% 1200 800 10 -5 51 90% 1800 200 0 -1 216 UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Veicoli innovativi • DARPA Grand Challenge Defense Advanced Research Projects Agency (2004, 2005, 2007) • Veicoli autonomi unico aiuto esterno il GPS • Edizioni 2004 e 2005 su piste extraurbane e veicoli isolati • Edizione 2007 in ambito «urbano» interferenza con altri veicoli in competizione obbligo di osservare le regole del traffico • Negli ultimi anni forte accelerazione nello sviluppo (veicoli automatizzati e connessi) • Traino principale di attori del settore delle nuove tecnologie • I costruttori si stanno velocemente adeguando, seppure con diverse velocità UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
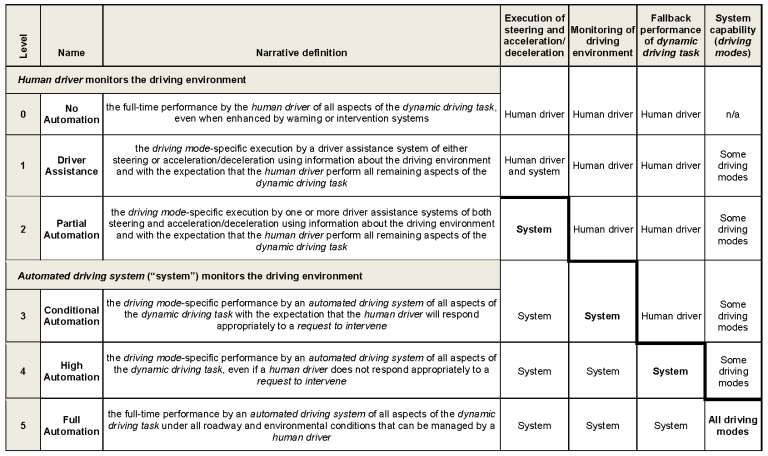
Livelli automazione • SAE (Society of Automotive Engineers) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Il veicolo come elemento di sistema • La tendenza è verso veicoli non solo automatici ma anche connessi • L’automazione è realizzata in maniera cooperativa • L’automazione non è l’unico obiettivo • Il veicolo è parte di una piattaforma di mobilità più ampia • Riceve e rilascia informazioni, reagisce in maniera adattiva, coopera in una logica di ottimizzazione del sistema • Convergenza tra innovazione tecnologica e di sistema • Visione della Mobility-as-a-Service • Auto = uno dei mezzi gestiti da fornitori di mobilità per soddisfare le richieste degli abbonati • Tecnologia = strumenti per gestire il veicolo come elemento della mobilità e per permetterne una fruizione «adattiva» UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Scenario di uso dei veicoli innovativi • Automazione e connessione potrebbe rendere i veicoli troppo sofisticati e costosi • È necessario che questa tendenza sia controbilanciata da • Una gestione «professionale» (flotte di mobility provider) • Un uso efficiente ed economico perché intenso (utilizzo condiviso e riduzione periodi di sosta/inattività) • Una specializzazione d’uso (veicoli urbani, extraurbani, adatti alla nebbia, con diversi sistemi di rifornimento ed alimentazione, ecc.) • Permette di controllare il costo di sviluppo/produzione • Necessità di un modello di utilizzo dissociato dal possesso (un veicolo di proprietà sarebbe «general purpose») • Un guidatore userà diversi veicoli • Un veicolo sarà utilizzato da una infinità di guidatori UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Research questions (transportation systems) • I guidatori interagiranno efficacemente con logiche di automazione di differente livello in vetture spesso diverse? • Come interagiranno tra loro veicoli con automazione diversa? (mixed traffic) • La teoria del deflusso come dovrà essere ri-specificata? • Come cambieranno i modelli di simulazione e previsione del traffico? • I sistemi di controllo del traffico come interagiranno con un flusso parzialmente e disomogeneamente automatizzato? • L’analisi/previsione dello stato di reti e sistemi aiuterà l’automazione? • Come sfruttare a livello di sistema la possibilità di integrare il traffico individuale in piattaforme multimodali di trasporto? Quali possibili ottimizzazioni per flotte di vetture gestite come servizio? • Come interagiranno e con quali risultati di sistemi differenti mobility providers? UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Livelli automazione • SAE (Society of Automotive Engineers) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Research questions (automotive) • Anche lo sviluppo di veicoli, logiche e componenti adotta processi basati sulla simulazione: • Prototipazione Rapida Un prototipo è dapprima progettato in ambiente di simulazione • Virtual-validation L’integrazione di componenti e soluzioni in un veicolo è testata: • Inserendone il modello di componente in un simulatore di veicolo (MIL – Model In the Loop) • Integrando la versione «fisica» della componente in un simulatore di veicolo e di scenario d’uso e sollecitazione (HIL – Hardware In the Loop) • Sempre più necessaria prototipazione/validazione di veicoli e automazione in ambienti di traffico espliciti e realistici • Prima: il veicolo era sollecitato dal guidatore = necessità di simulare sicurezza del prodotto e performance rispetto a richieste «semplici» (accelera, sterza, frena, …) • Ora: il veicolo interagisce direttamente con il traffico, si riduce il ruolo del guidatore come tramite/medium tra gli stimoli del traffico e la richiesta di performance al veicolo UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Integrazione strumenti automotive/traffico • Strumento MIL o HIL in campo automotive • Moduli di scenario e «traffico» DSPACE – ASM Traffic IPG - CarMaker UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
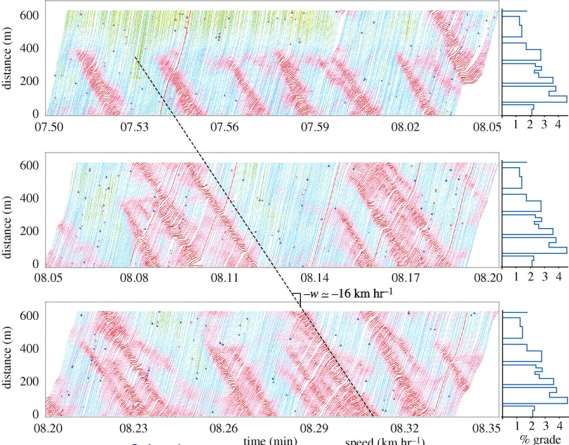
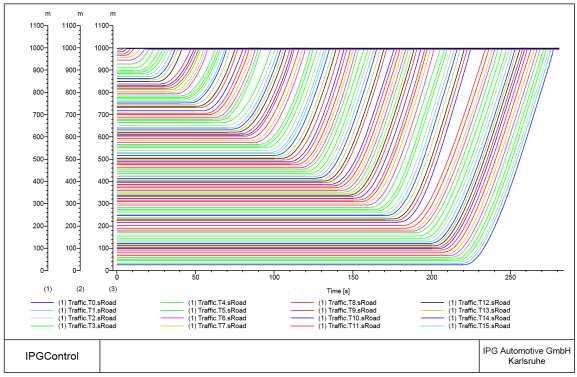
Esempio integrazione automotive/traffico • Prova realismo Formazione onda di shock • Situazione da «tamponamento a catena» • Non ci siamo riusciti • L’ambiente non lo permette UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Esempio integrazione automotive/traffico • Prova realismo Dissipazione onda di shock (ripartenza) • Velocità a regime deve essere Velocità Critica della corrente di traffico: 90 Km/h • La portata raggiunta dovrebbe essere la Capacità: 1700 veic/h • Esperimenti su strade di categoria diversa (es.: Cat. A, autostrade e Cat D, secondarie) ripetono lo stesso comportamento del traffico UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Altri esempi • Provato un AEB (Automated Emergency Braking) • In ambiente automotive «tradizionale» lo stimolo al AEB è dato da «scenari di test» • Distanza, velocità relativa, istante di attivazione, … • Logica di controllo e dinamica del veicolo rappresentata in ambiente misto Matlab/Simulink + IPG Carmaker • Test OK La logica di controllo è adatta ad evitare incidenti nella maggior parte degli scenari di sollecitazione • Ulteriore integrazione con scenario di traffico (microsimulazione) – gli stimoli al veicolo controllato gli stessi della prova precedente • Test KO La logica di controllo generare in un numero molto elevato di casi tamponamenti a catena nella corrente sopraggiungente UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Sollecitazioni C-ITS • D.M. n. 70 28/02/2018 «Smart Road» • Dorsale road-side di comunicazione dei dati ad elevato bit-rate (es.: fibra) Solo Smart Road tipo I • Copertura asse stradale e territorio circostante con servizio IoT di tipo LPWAN (Low Power-Wide Area Network) • Road-Side Unit per la comunicazione V2I, localizzate per consentire la connessione a veicoli dotati di On-board-unit V2X standard • Trasmissione informazioni V2I Tutte le Smart Road • Controllo del traffico, gestione degli scenari, gestione operativa • Minimizzazione della impronta ecologica delle tecnologie avanzate • Presenza di un sistema di hot-spot Wifi per device personali, nelle aree di servizio (if any) • Rappresentazione modellistica del grafo trasportistico per livelli di dettaglio • Sistema di monitoraggio delle opere d’arte e delle strutture in generale • Sistema di monitoraggio del traffico ed enforcement articolato su livelli • Sistema di archiviazione e storicizzazione dei dati • Sistema di monitoraggio delle informazioni Meteo • Modelli di previsione del traffico • Servizi avanzati per utenti e operatori UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Sollecitazioni C-ITS STRIA – WG on Connected and automated transport (Strategic Transportation Research and Innovation Agenda) • Vehicle • In vehicle enablers for automated transport • Human factors (mainly «driving behaviour» and HMI) • Vehicle and traffic • Vehicle validation • Large scale demonstration (pilots to enable deployment) • Transportation systems and infrastructures • Shared Connected and automated mobility services • Socioeconomic impacts of transport automation (and user/public acceptance) • Physical-digital infrastructures • Big data, artificial intelligence and their applications UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Grazie per l’attenzione Discussione … UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Puoi anche leggere

















































