Agricoltura di precisione e uso sostenibile delle risorse - Alessandro Matese
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Agricoltura di precisione e uso
sostenibile delle risorse
Alessandro Matese
Istituto di Biometeorologia
IBIMET CNR
AGROTEC
Istituto di Biometeorologia TEAM-WORK
GESTIONE DEL TERRITORIO
Gestione degli ecosistemi naturali attraverso metodologie di
monitoraggio di parametri ambientali relativi processi sul
territorio, sia antropici come le colture, l’irrigazione, la
deforestazione, gli impatti ambientali oppure eventi naturali
AGRICOLTURA DI PRECISIONE E AMBIENTE
Le interazioni tra i fattori meteorologici/climatici e la vegetazione
(ecosistemi agricoli e naturali) necessitano, per la loro
comprensione, di studi a diversa scala che indaghino i meccanismi
fisiologici di risposta allo stress e di adattamento anche ai
cambiamenti climatici.
CLIMATOLOGIA E BIOMETEO
La climatologia comprende i settori della climatologia dinamica,
dei cambiamenti climatici e della variabilità climatica.
Introduzione
• Definizioni e concetti
Agricoltura di Precisione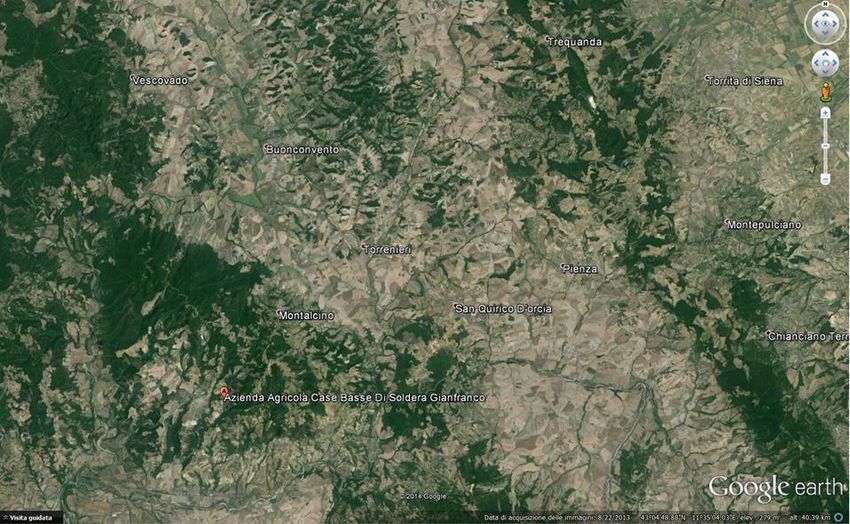
SFIDE DELL’AGRICOLTURA
Costi di produzione continuano ad incrementare
Prezzi di vendita scendono o restano stabili
Standard qualitativi richiesti sempre maggiori
Forte competizione da mercati esteri
Necessario incremento di efficienza produttiva
Agricoltura deve entrare dell’era dell’informazione
AGRICOLTURA DI PRECISIONE !
Agricoltura tradizionale
• Interventi agronomici UNIFORMI
• A calendario
• Cautelativa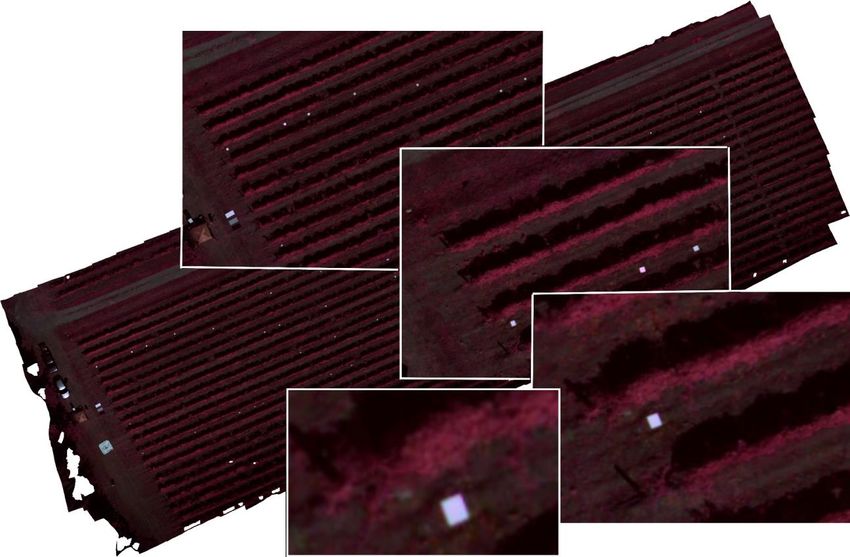
CONCETTO DI VARIABILITA’
variazione dei parametri di suolo e piante
all’interno di un’area in un determinato tempo
SPAZIALE : suolo, pH, stress, fotosintesi
TEMPORALE : anno per anno, entro l’anno
IL VIGNETO È UN AMBIENTE ETEROGENEO
Conoscere l’eterogeneità del vigneto consente di gestire nel modo
più ottimale il vigneto stesso, intervenendo con pratiche
agronomiche sito-specifiche
La ricerca ha fornito strumenti conoscitivi oggettivi in grado di caratterizzare in modo
dettagliato l’ambiente di sviluppo della pianta ed il suo stato vegetativo
PROXIMAL SENSING REMOTE SENSING
AGRICOLTURA DI PRECISIONE
“un sistema integrato di informazioni e gestione delle produzioni agricole
progettato per incrementare, utilizzando un approccio sito-specifico,
l’efficienza della produzione agricola, la qualità dei prodotti e la redditività,
riducendo al minimo gli impatti ambientali”
Fare la COSA giusta, nel POSTO OBIETTIVI
giusto e al MOMENTO giusto !
• Ottimizzare l’efficienza produttiva
dove per COSA giusta si intende
l’intervento agronomico • Ottimizzare la qualità dei prodotti
• Minimizzare gli impatti ambientali
• Minimizzare i costi aziendali
Storia dell’Agricoltura di Precisione
• Nuovo concetto di gestione sito specifica
Livelli di tecnologia
1. GPS(GNSS) -> Guida Automatica
2. Sensori + GPS -> Mappatura Variabilità e Produzioni
3. Sensori + GPS + Attuatori -> VRT (offline; on the go)
Non sono necessarie le macchine ma è il concetto che cambia
Interventi sito-specifici manuali ?!?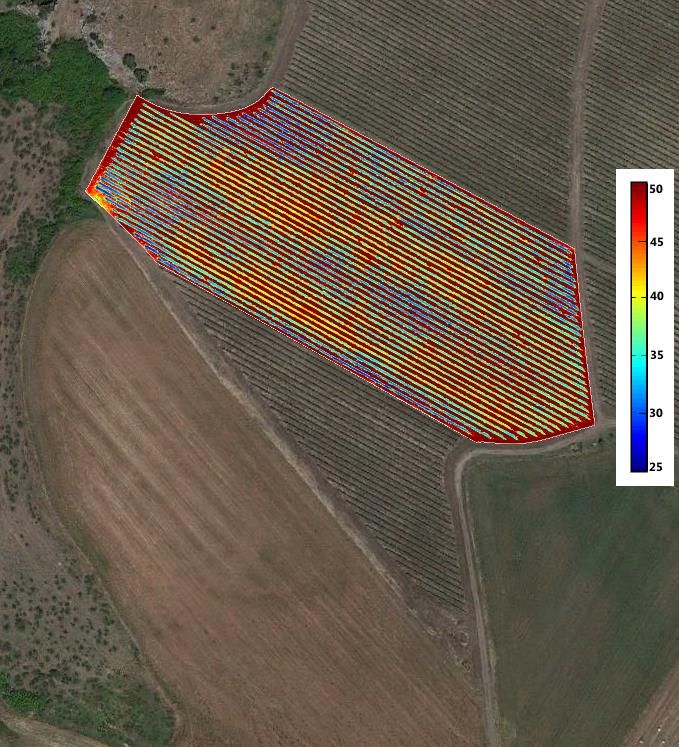
FASI DELL’AGRICOLTURA DI PRECISIONE
1
MISURA
E COMPRENSIONE
DELLA
VARIABILITA’ SPAZIALE
3
VALUTAZIONE 2
DELL’EFFICACIA
GESTIONE
DELLA
VARIABILITA’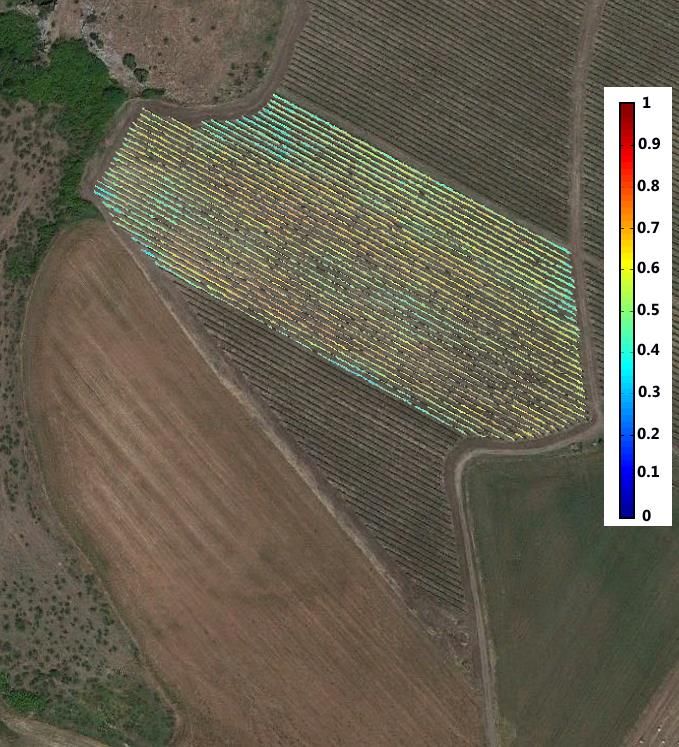
Monitoraggio
1- OSSERVAZIONE microclimatico Processo attuativo dell’Agricoltura di Precisione
E RACCOLTA DATI
GEORIFERITI (GPS)
Monitoraggio parametri
3 - INTERVENTI
qualitativi delle uve
SITO-SPECIFICI
Monitoraggio eco-
fisiologico remoto
2 – ELABORAZIONE
DATI e MODELLIProximal Sensing • Concetti • Sensori
WSN - agrometeo Crop monitoring Tecnologie di monitoraggio
Yield monitors –
on the go
Soil sensors
Apparent soil electrical conductivity (ECa) Proximal Crop reflectance sensor
EMI
GPR
Geoelettrici
Quality sensorsWSN
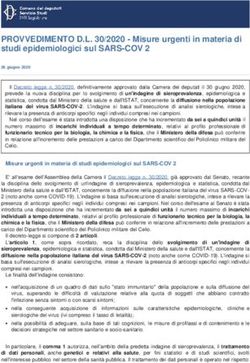
Wireless Sensor Network (WSN), reti di sensori wireless in grado di acquisire dati e renderli fruibili da remoto
per caratterizzare la variabilità micrometeorologica presente in vignetoEsperienze di monitoraggio micrometeorologico in vigneto
Progetto Consorzio Tuscania
2007-2010
Sviluppo di un sistema di
monitoraggio basato su tecnologia
wireless per lo studio della
variabilità microclimatica in
vigneto
Progetto CROSS-VIT 2011-2013
(Veneto) Temperature – Pinot g.
Studio sulla variabilità del
microclima interno della chioma in
termini di temperature e umidità
dell’aria e radiazione solare, in
funzione di diverse tesi di
potatura del vigneto
Anno
Sperimentazione Sistema Costo [€/nodo]
sperimentazione
Progetto AGRODUINO
Progetto Consorzio
Studio delle performance 2006 - 2010 NAV 800
Tuscania
di monitoraggio
utilizzando hardware low CRA – Conegliano
2011 CROSSBOW 300
cost e open source Veneto
ARDUINO
2012-2014 AGRODUINO ARDUINO 100Progetto Agroduino
Piattaforma low-cost e open-source, flessibile e facile da usare
• Costi contenuti (ordine di 100 Euro sensori esclusi)
• Hardware e Software open source: i modelli dei circuiti e i firmware sono distribuiti con licenza Creative Commons e possono essere modificati
• Vasta comunità di utenti, pronta a fornire supporto e utili librerieRemote Sensing • Cenni di telerilevamento • Piattaforme • Sistemi Aeromobili a Pilotaggio Remoto (SAPR) • Regolamento Enac
La radiazione incidente su di una determinata superficie può essere assorbita, riflessa o trasmessa Telerilevamento Nella regione del visibile (400-700 nm), la quantità di radiazione riflessa e trasmessa e relativamente bassa, ad eccezione del picco nella regione del verde (struttura cellulare e pigmenti fotosintetici) Nel vicino infrarosso (700-1350 nm) le foglie assorbono poco, a causa della struttura del mesofillo fogliare e quindi riflettanza e trasmittanza sono molto alte. Il passaggio tra valori di riflessione bassi nel rosso ed alti nell’infrarosso e molto rapido: questa porzione dello spettro, denominata Red Edge, e molto utilizzata nello studio dello stato di salute della vegetazione
SPUNTO DI RIFLESSIONE:
Quale è la migliore soluzione per remote
UAV sensing in agricoltura precisione?
AEREO
SATELLITE
Nella valutazione della miglior piattaforma per uno specifico monitoraggio in campo, devono essere presi in esame diverse variabili:
estensione della superficie di interesse, risoluzione temporale, risoluzione spaziale, tempi di elaborazione delle immagini, senza dimenticare
la valutazione dei costi di impiegoCaratteristiche spettrali e spaziali del sensore MSI (Multi Spectral Imager) del satellite Sentinel-2
Piattaforma UAV
1. Ala fissa
2. Elica
Differenza principale tra sistemi ad ala
fissa e multirotori, è la possibilità di questi
ultimi di effettuare decollo verticale, senza
la necessità di spazio libero per operazioni
di decollo e atterraggio
La gestione del volo viene eseguita dalla piattaforma in autonomia (monitorati dalla stazione di controllo
remoto a terra).
In agricoltura di precisione si utilizzano principalmente soluzioni di peso inferiore a 25 kg, con
un’autonomia di volo che varia in funzione del modello e del peso dei sensori equipaggiati a bordo
(payload).• la “flight control”, ossia l’unità centrale che gestisce il volo; Architettura UAV • il sistema IMU (Inertial Measurement Unit), modulo per la misurazione diretta di accelerazioni e velocità angolari rispetto a tre assi nello spazio, basati su accelerometri, giroscopi, bussola magnetica, GPS e altimetro barometrico; • il sistema di controllo radio, ossia un ricevitore che si interfaccia con un telecomando; • il sistema ECS (Electronic Speed Control), che interfaccia la flight control con ciascuno dei motori presenti sul drone, e consente di comandare individualmente la velocità di rotazione di ciascuno di essi; • il “camera mount”, ossia una culla stabilizzata basculante su 3 assi, in grado di supportare i sensori e allo stesso tempo garantirne il corretto orientamento durante gli spostamenti del drone; • il telaio o frame, generalmente realizzato in carbonio.
Per aeromobile si intende ogni macchina destinata al trasporto per aria
di persone o cose;
Sono considerati aeromobili anche i mezzi aerei a pilotaggio remoto,
definiti dai regolamenti dell’ENAC (Ente nazionale per l'aviazione civile);
Il Regolamento ENAC distingue i mezzi aerei a pilotaggio remoto in
Sistemi Aeromobili a Pilotaggio Remoto e Aeromodelli; prima edizione
del regolamento per l’utilizzo dei mezzi aerei a pilotaggio remoto, in
vigore dal Febbraio 2014, e successivamente una seconda edizione nel
Luglio 2015 completata poi con l’emendamento 1 del 21 dicembre 2015
• I mezzi aerei a pilotaggio remoto impiegati in operazioni specializzate o in attività sperimentali,
costituiscono i Sistemi Aeromobili a Pilotaggio Remoto (SAPR);
• Gli Aeromodelli possono essere utilizzati esclusivamente per impiego ricreazionale e sportivo.
Sono spesso definiti in termini anglosassoni UAV (Unmanned Aerial
Vehicle) o impropriamente droni, in grado di equipaggiare sensori ottici
dedicati all’acquisizione di dati telerilevatiRegolamento suddivide i Sistemi Aerei a Pilotaggio Remoto in due categorie in base al peso, inferiore a 25 kg e
uguale o maggiore a 25 kg ma non superiore ai 150 kg.
Nel Regolamento si definisce il concetto di Visual Line of Sight (VLOS), secondo il quale le operazioni di volo devono
essere condotte entro una distanza tale che consenta al pilota di mantenere un contatto visivo continuativo con il
mezzo in volo, assicurare una corretta gestione del volo ed evitare potenziali collisioni.
Le operazioni in VLOS sono consentite solo di giorno, fino ad un’altezza di 150 m dal suolo ed una
distanza sul piano orizzontale di 500 m rispetto al pilota, e devono essere condotte in condizioni tali
da garantire sicurezza di volo. In caso di perdita del contatto visivo del SAPR, entro i limiti orizzontali
e verticali consentiti, il pilota deve terminare il volo il prima possibile
I sistemi APR appartenenti alla prima categoria sono quelli più comunemente impiegati in agricoltura di precisione, e
non critiche
se utilizzati in operazioni di volo , la responsabilità è lasciata all'operatore che valuta la criticità e
l'idoneità del sistema per mezzo di “autocertificazione”.
NON CRITICO:
• fuori da agglomerati urbani e infrastrutture;
• “VLOS” volume di spazio di 150 m di altezza massima dal terreno e di raggio di 500 m;
• lontano da autostrade, ferrovie e aeroporti.
Le operazioni critiche , invece, sono autorizzate dall'ENAC, sulla base di accertamenti, che tengono conto della
complessità del sistema e della criticità degli scenari operativi.
Non è consentito condurre operazioni con un SAPR se non è stata stipulata e in corso di validità un’assicurazione
concernente la responsabilità civile verso terziEquipaggiamento e acquisizione • Flotta AeroLab IBIMET-CNR • Multispettrale e iperspettrale • Termico • Lidar
SENSORISTICA PER DRONE
CULLA STABILIZZATA X
CAMERA TERMICA
SUPPORTO SENSORI
CAMERA VISIBILE Analisi della
temperatura
superficiale e
dello stress
Fotogrammetria idrico
ad altissima
risoluzione
Optris GmbH - PI LightWeight
Canon – Eos 7D 24Mpx
CAMERA MULTISPETTRALE LIDAR - LASER SCANNER
CAMERA IPERSPETTRALE
Analisi della
risposta spettrale
della vegetazione
e della salute
delle piante
RIEGL - VUX-1 Ricostruzione
3D e stima della
biomassa della
Micasense - Sequoia Cubert GmbH – UHD 185 the Firefly chiomaLa pianificazione del volo viene effettuata in funzione della risoluzione
a terra necessaria e al grado di sovrapposizione delle immagini
(overlap)
Overlap frontale
Lateral overlap
Velocità
Distanza tra i
avanzamento
transetti
Velocità di scatto
Very good overlap is about 70% in both side
Risoluzione delle immagini multispettrali acquisite a differenti quote
A) 70m – immagine a terra di 47 x 35m con circa 0.04m/pixel di risoluzione
B) 150m - immagine a terra di 100 x 75m con circa 0.08m/pixel di risoluzioneElaborazione dati • Catena di elaborazione dati • Calibrazioni e correzioni radiometriche atmosferiche, termiche • Problematiche del telerilevamento • Indici vegetazione e termici
SPUNTO DI RIFLESSIONE:
IMMAGINE RAW Procedure
Esperienze di Acquisita con camera multispettrale
elaborazioni immagini ?
PRE-PROCESSING DN
Software del sensore
tif
MOSAICATURA Agisoft Photoscan + Ground Control
Points (GCP)
GEOREFERENZIAZIONE
CORREZIONE geometrica, atmosferica Modelli di correzione + reference in
CALIBRAZIONE radiometrica campo
FILTRAGGIO OMBRE E INTERFILA
CALCOLO INDICI Algoritmi Matlab
Mappa indice (NDVI)Mappatura e Data Management • Mappe tematiche • Geostatistica • GIS e GeoDB • Utilizzo mappe VRT
SPUNTO DI RIFLESSIONE: Esperienze di elaborazioni immagini ? MAPPE (dal dato alla mappa di prescrizione)
POST-PROCESSING
TIPOLOGIA DI DATI TIPOLOGIA DI TIPOLOGIA DI TIPOLOGIA DI PRESCRIZIONE
INTERPOLAZIONE CLASSIFICAZIONE
Punti di Media mobile Quantile, std, equal interval Interpretazione agronomica
campionamento Algoritmi commerciali
IDW Clustering (Fuzzy K-means)
Raster (Trimble, Agco, Cropcircle)
Kriging Factorial kriging
Dataset Mappa tematica Management Zones Mappa di prescrizioneNDVI
Il Normalized Difference Vegetation Index (NDVI) evidenzia le differenze tra la riflettanza nella banda del rosso nel
visibile (RR) e vicino infrarosso (RNIR). L’indice è sensibile alla attività fotosintetica e alla vegetazione, definita come
Photosynthetic Active Biomass (PAB)
La vegetazione mostra NDVI positivi, generalmente tra 0.2 e 0.8
PIANTE SANE riflettono poco nel visibile (RED) e
una grande parte della luce vicino infrarosso (NIR)
PIANTE STRESSATE riflettono un pò più nel visibile
(RED) e un pò meno nel vicino infrarosso (NIR)Analisi della variabilità spaziale - VIGORE
Mosaico multispettrale
Mappa di vigore (NDVI)
3D model Mappa di vigore (NDVI) – filtro filariCWSI - Crop Water Stress Index
L’indice CWSI è basato sull’incremento della temperatura fogliare (Tleaf) a seguito dell’interruzione
del fenomeno di raffreddamento evapotraspirativo dovuto alla chiusura degli stomi in condizioni di
carenza idrica al fine di preservarne la disponibilità
Twet
Tdry
Pistola termica per
misura reference
(FLIRi7)
Reference non Reference stressato -
stressato - acqua vasellina
CWSI = (Tleaf – Twet) / (Tdry – Twet)Analisi della variabilità spaziale – STRESS IDRICO
Mappa di stress (CWSII)
Mosaico termico
Mappa di stress (CWSI) – filtro filari
3D modelVRT - VITICOLTURA • Vendemmiatrice selettiva Pellenc (a) • Sfogliatrice a rateo variabile Tecnovit (b) • Atomizzatore selettivo con sensori a ultrasuoni Durand-Wayland (c) • Spandiconcime a rateo variabile Tecnovit (d)
Esempi di Agbots sviluppati per effettuare
ROBOTICA interventi di gestione agronomica in pieno campo.
Sistemi per gestione dei trattamenti
fitosanitari:
a) Grizzly-Clearpath Robotics Inc.
b) Hortibot project-Aarhus University
c) Bonirob-Amazonen-Werke
Sistemi per lavorazioni del suolo:
d) Armadillo-University of Southern
Denmark
e) ASI Forge Robotic Platform
Sistemi per raccolta frutti:
f) Multipurpose Orchard Robotics-Robotics
Plus
g) Husky-Queensland University of
Technology
Sistemi per potature:
h) Wall-Ye
i) Vision Robotics Corporation.
Sistemi per la gestione dell’inerbimento:
l) GrassBots ICT-AGRI Eranet project-
Aarhus University
m) Vitirover Robot
Sistemi di monitoraggio delle colture:
n) Armadillo-University of Southern
Denmark,
o) Shrimp-Australian Centre for Field
Robotics University of Sydney
p) Vinerobot Project
q) VinBot-Robotnik Automation S.L.L.SPUNTO DI RIFLESSIONE:
Casi studio Esperienze e conoscenza di ricerche
effettuate con tecniche di AdP
• Esca – UNIFI - GAJA
• Stress termici - Montalcino
• Stress idrici - CNR
• Variabilità qualitativa – CRAVIT
• NDVI e CWSI - UPNA
• Biomassa (3D) - ALSIAREMOTE SENSING – Disease monitoring
MAL DELL’ESCA della VITE
Le malattie fungine del legno sono difficilmente controllabili e sono responsabili di significative
perdite economiche nel settore vitivinicolo. Il Mal dell’esca è una malattia ampiamente diffusa,
causata da una colonizzazione del sistema vascolare dei funghi Phaeomoniella chlamydospora e
Phaeoacremonium aleophilum, e manifesta i suoi sintomi con tipiche tigrature fogliari
L’espressione dei sintomi è intermittente negli anni, è quindi difficile definire l’effettiva presenza di piante infette
Nelle foglie si manifesta un drastico calo dell’attività fotosintetica in risposta allo stress causato dal patogeno
molti giorni prima che siano visibili i primi sintomi fogliari
Obiettivo
Studiare le correlazioni tra dati NDVI ad altissima risoluzione da UAV e la sintomatologia monitorata
da osservazioni a terra, al fine di sviluppare una metodologia in grado di effettuare un’analisi remota
dell’incidenza dei sintomi, ed esplorare le potenzialità di piattaforme UAV come strumento predittivo
dell’insorgere dei sintomiAttività ESCA 2011 - 2013
Storico di 12 anni di
monitoraggio dei sintomi del
Mal dell’esca
Parcella sperimentale
Ogni pianta è stata georiferita ad altissima
risoluzione (0.02 m) con GPS Differenziale
MULTIROTORE 8 ELICHE
FLY&SENSE CNR PISA
50 piante 10 filari
INCIDENZA MAL
DELL’ESCA > 30%
500 piante Camera multispettraleRisultati dell’analisi dei dati NDVI
ID
Analisi dei dati estratti per pianta dalle immagini
C Piante controllo, mai manifestato sintomi
acquisite nei voli di maggio, giugno e luglio, rispetto
A Piante asintomatiche, ma con sintomi negli anni precedenti
S Piante sintomatiche ai sintomi osservati a terra
Maggio Giugno Luglio
A * .
S . ** ***
Signif. codes: '***' 0.001, '**' 0.01, '*' 0.05, '.' 0.1Attività ESCA 2015
Agricola Cà Marcanda, Bolgheri (Italy)
Cabernet SauvignonAnalisi ad alto dettaglio a livello di
singola pianta
Quota volo 50m
Risoluzione spaziale 3cm/pixel
Individuzione delle singole
piante georiferite su mappa
Ogni pianta è stata georiferita con GPS
Estrazione del dato NDVI per ogni pianta
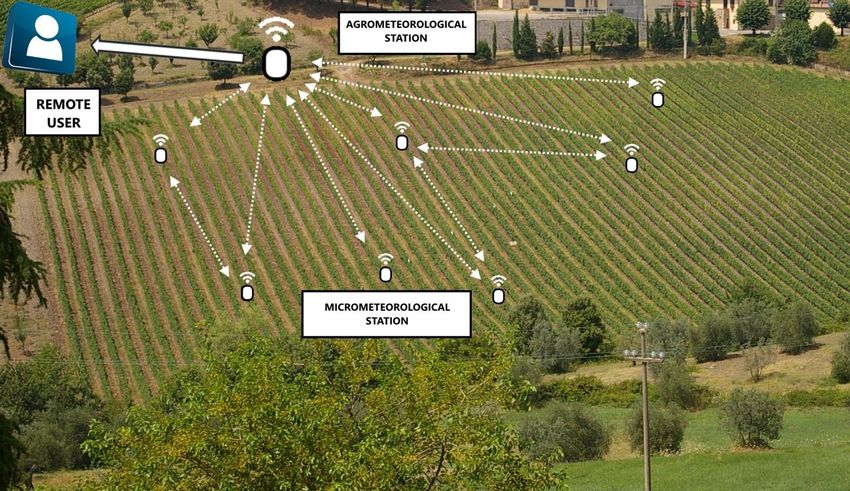
Differenziale (0.02 m) da modello 3D (rimozione suoloAttività di monitoraggio presso Case Basse – Montalcino 2013-2014
TUSCANY - ITALY
INGENTI DANNI DA
SCOTTATURE 2011- 2012
MONTALCINO
2011 PERDITA
Az. Agricola SUPERIORE AL 40%
Case Basse DELLA
PRODUZIONE
Analisi della variabilità spaziale in termini di vigore per ottimizzare la dislocazione di una
rete di monitoraggio micrometeorologico in zone rappresentative finalizzata allo studio
delle dinamiche termiche della chioma e del grappoloREMOTE SENSING
PROXIMAL SENSING
Caratterizzazione della variabilità
Dislocazione sensoristica in zone rappresentative
Temperature
MicroProbe
(GMR Strumenti)
Temperatura del Temperatura e
grappolo umidità della chiomaDinamiche termiche del grappolo
Elevate differenze
termiche sul
grappolo (fino 8°C)
Differente L’impiego dei droni in agricoltura non si deve limitare a
cinetica di
riscaldamento fornire strumenti di supporto decisionale per la gestione
agronomica aziendale, ma rappresenta uno strumento
fondamentale per qualsiasi sperimentazione dato il forte
impatto del vigore sulla risposta della piantaUPNA – Navarra (Spagna)
Attività 2105 Abruzzo – Tendone
Correlazioni NDVI vs parametri di produzione Le classi di NDVI hanno permesso di individuare le zone con piante di diverso vigore e differente capacità produttiva. Valori dell’indice inferiori a 0,5 sono stati associati a forti penalizzazioni produttive e a riduzioni di efficienza dei vigneti a tendone in cui la capacità di accumulo di zuccheri, antociani e polifenoli si riduce del 50-60%, rendendo necessari interventi correttivi per portare l’intero vigneto a produrre adeguate quantità di uve idonee ad essere trasformate in vini di alta qualità.
2010 – 2016 Casi studio di telerilevamento da drone in viticoltura di precisione – IBIMET CNR
Progetto Cisia 2010-2013
(Catania)
Valutazione delle potenzialità
di un approccio di remote
sensing da UAV per
analizzare la correlazione
tra vigore (NDVI) e maturità
fenolica (antociani)
SupAgro 2013 (Montpellier,
FRANCIA) Fallanza !
Analisi delle potenzialità del
remote sensing da UAV per
ottimizzare campionamenti in
vigneto
Elaborazione di un metodo per
analizzare e quantificare le
fallanze da remotoUniversità degli Studi di Torino 2013-2014
(Barolo)
Analisi della variabilità pedo-morfologica nella
regione del Barolo in Piemonte – studio della
correlazione tra tipologia di suolo e vigoria della
chioma
Progetto Viteclima CRAVIT 2014 (Veneto)
Analisi della variabilità territoriale della
risposta allo stress idrico del vitigno “Glera”
Utilizzo combinato di tecniche di remote
sensing da UAV e da satellite per ottimizzare
un processo di zonazione del comprensorio del
ProseccoCHM = DSM - DTM
Istituto di Biometeorologia
Grazie per l’attenzionePuoi anche leggere