Tecnica dei Trasporti: Trasporto Marittimo - Docente: Stefano Ricci Sapienza Università di Roma
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

1st SUMMER SCHOOL SIDT
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO (SA)
Mercoledì 5 – Mercoledì 12 Settembre 2018
Tecnica dei Trasporti:
Trasporto Marittimo
Docente: Stefano Ricci
Sapienza Università di Roma
06 settembre 2018
Contenuti
•
Vie d’acqua
•
Nozioni di oceanografia e caratteristiche fisico-chimiche
dell’acqua
•
Moti delle masse marine e moto ondoso
•
Natanti
•
Sostentazione e stabilità
•
Architettura: struttura, materiali e dimensioni
•
Locomozione: resistenze al moto, motori e propulsori
•
Navigazione
•
Distanze di sicurezza, capacità di una rotta, controllo e
gestioneDEGLI
UNIVERSITÀ del traffico
STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Fondamenti di oceanografia:
acque marine sulla Terra
Superficie terrestre
70.8% mare (circa 361 miliardi di km2)
- 80.9% nell’emisfero Sud
- 50.7% nell’emisfero Nord
29.2% terre emerse (circa 149 miliardi di km2)
Oceani
Vasti, profondi e non circondati da masse continentali
Mari
Marginali, connessi agli Oceani da ampi e profondi bracci di mare
(Mare del Nord, Mare del Giappone, Golfo di California, ecc.)
Mediterranei, circondati da continenti, connessi agli Oceani da
bracci di mare stretti e poco profondi
(Mar Mediterraneo, Mar Baltico, Golfo Persico, ecc.)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018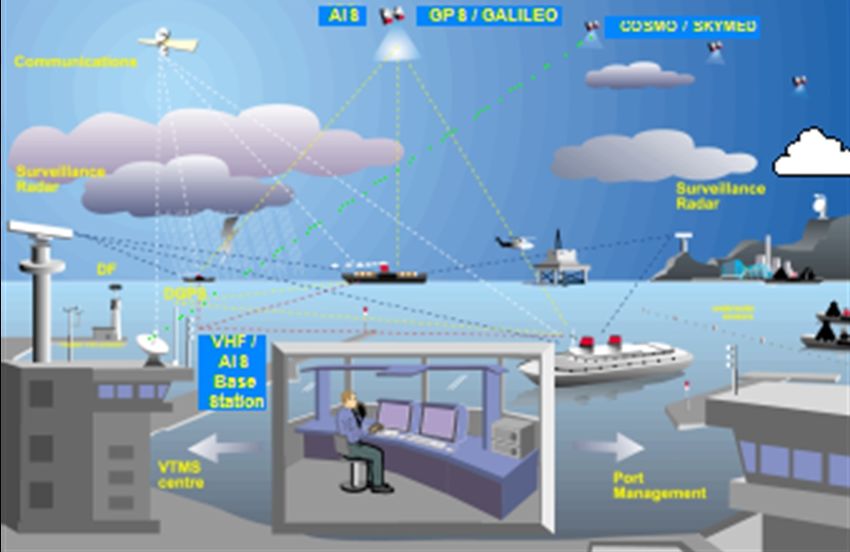
Fondamenti di oceanografia:
fondali marini
Profondità
< 200 m: d’interesse per la navigazione
> 200 m: d’interesse a fini oceanografici (indagini batimetriche via
Piattaforma continentale
Estensione variabile a seconda della geomorfologia
In Italia
- Adriatico: > 500 km
- Tirreno: pochi km
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018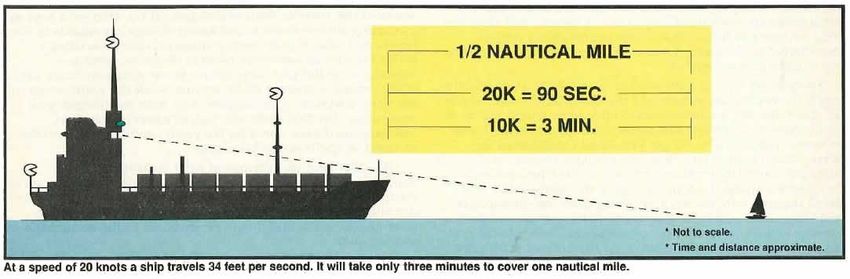
Fondamenti di oceanografia:
livelli marini
Variabili nello spazio e nel tempo
- Maree
- Correnti
- Onde
Variabilità di breve periodo attorno a livello medio
- Navigazione in acque basse
- Progetto e costruzione dei porti
- Gestione delle coste
Variabilità di lungo periodo
(ad esempio fra Atlantico e Pacifico)
- Differenze di salinità e densità
- Correnti e venti
Necessità di un livello di riferimento
- Carte nautiche riferite prudenzialmente a MLWS o LAT
- In Italia anche utilizzata la differenza MLW-MLWS
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018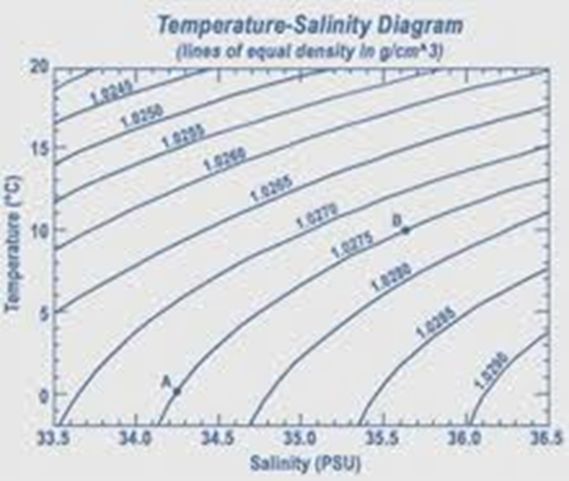
Caratteristiche chimico-fisiche
dell’acqua ed effetti sulla
navigazione
Densità
Crescente con la salinità e decrescente con la temperatura
Valore medio relativo in mare (salinità 34‰): 1,026 kg/dm3
Pressione idrostatica
Densità crescente con la profondità
Circa +1 bar ogni -10 m
Moti delle acque profonde generati da maree e correnti
Maree: rilevanti per la navigazione in acque basse e la gestione dei porti
(altezze massime: 10÷12 m, periodo: 12÷24 h)
Correnti: modesti effetti sulla navigazione in mare con eccezioni locali
Moti superficiali generati dal vento
Moti ondosi di rilievo per la navigazione
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018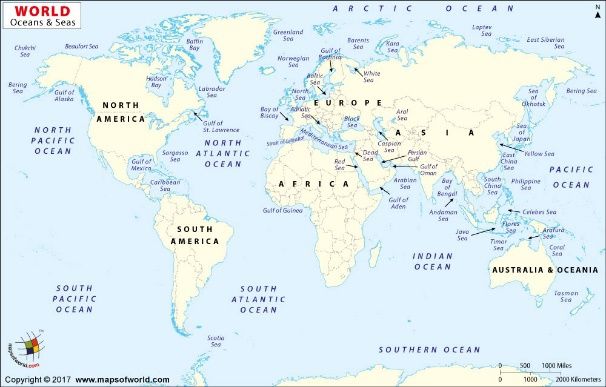
Moto ondoso: generazione e morfologia Onde generate dal vento Generate per velocità del vento > 1 m/s - Lunghezza iniziale: 5÷10 cm - Altezza iniziale: 1÷2 cm - Periodo di oscillazione < 30 s Dimensioni e periodo crescenti con: - Velocità del vento - Estensione e profondità dell’area investita dal vento Permanenti anche in assenza locale di vento (onde di mare morto: swells) UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Moto ondoso: effetti sui natanti
Possibili situazioni
a) L > λ
Carena che taglia le onde poggia su diverse di
esse, situazione simile a quella di superficie liscia
c) d) L ~ λ
Nave che passa da condizioni di trave appoggiata
agli estremi a condizioni di trave appoggiata al
centro (sollecitazioni di taglio e flessione) con
fatica strutturale e deformazioni elevate se la
frequenza delle sollecitazioni esterne uguaglia la
frequenza propria
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018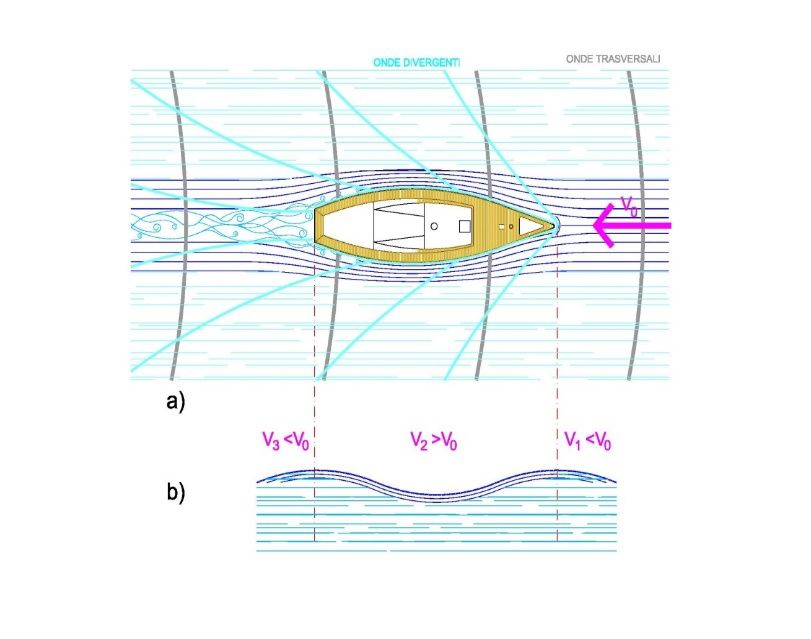
Natanti: sostentazione
Idrostatica
Spinta generata dallo spostamento della massa d’acqua
a seguito dell’immersione dello scafo, secondo il principio
di Archimede
-
Differenza di peso specifico del materiale rispetto a
quello dell'acqua (zattera)
-
Forma cava del corpo, parzialmente occupato da aria,
tale che il volume dell'acqua spostata dalla carena sia
maggiore del volume complessivo del corpo (nave)
Idrodinamica
Spinta generata dalle azioni dinamiche risultanti dal
movimento relativo fra carena e acqua a seguito della
variazione della quantità di moto delle particelle d’acqua
Cuscino d’aria
Spinta generata dalla pressione dell’aria fra veicolo e
superficie dell’acqua in un volume ristretto al di sotto
della carena
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018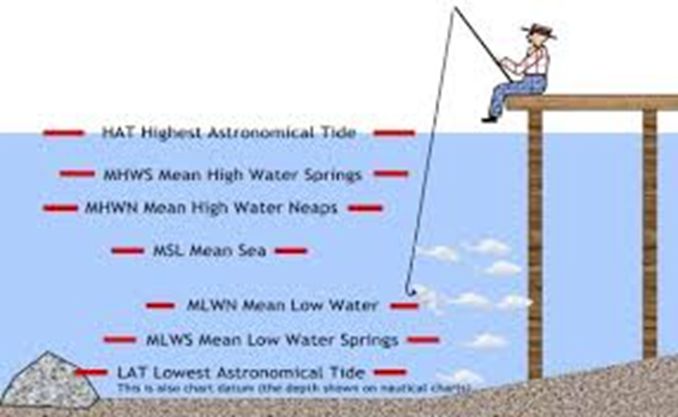
Natanti: galleggiamento e immersione G = baricentro C = centro di spinta (baricentro del volume immerso) Immersione crescente fino a raggiungere l’equilibrio fra peso P e spinta idrostatica S Se P < S e i < H (corpo galleggiante = natante) Se P > S e i ≥ H (corpo completamente immerso = sommergibile) Il corpo affonda finché: - La pressione idrostatica ristabilisce l’equilibrio - Si raggiunge il fondo UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Natanti: stabilità trasversale Inclinazione trasversale a seguito di un moto di rollio Per ogni piano di fluttuazione - Volume immerso costante - Cambio della forma del volume immerso - Cambio della posizione del centro di spinta C - Cambio della posizione del falso metacentro Mf Equilibrio per tutti i piani di fluttuazione - Stabile se Mf è al di sopra di G - Instabile se Mf è al di sotto di G Angolo limite di stabilità Energia stabilizzante proporzionale all’area compresa fra le curve di Mf e G UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Natanti: struttura
Scheletro
Trave longitudinale principale (chiglia) e travi curve trasversali
(costole)
Resistenza a forze esterne (acqua) e interne (carichi)
Fasciame
Resistenza alla sola pressione dell’acqua
Contributo alla rigidità globale dello scafo
Guscio rigido resistente e non sommergibile
Fattori che influenzano la forma dello scafo
Riduzione della superficie bagnata per limitare le resistenze al
moto
Riduzione delle interazioni carena-acqua sotto l’azione del moto
ondoso
Incremento del dislocamento per aumentare la capacità di carico
Forma tipica risultante
Solido a doppia DEGLI
UNIVERSITÀ curvatura (cilindro)
STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Natanti: materiali costruttivi
Legno
Piccole navi e imbarcazioni da diporto
Costruzione prevalentemente manuale molto costosa
Acciaio
Resistente alla corrosione in leghe con altri metalli
Resiliente per assorbire le deformazioni dovute all’impatto con le onde
Saldabile all’arco elettrico
Plastica
Imbarcazioni piccole e leggere e sovrastrutture
Calcestruzzo armato
Chiatte economiche ma poco resistenti agli urti
Leghe leggere
Sovrastrutture per ridurre il peso complessivo della nave
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Natanti: dimensioni e carichi
Stazza (Tonnage)
1 Tonnellata = 100 ft3 = 2.832 m3 (1 ft = 0,304 m)
Stazza Lorda (Gross Tonnage)
Volume di tutti i locali chiusi
Stazza Netta (Net Tonnage)
Volume disponibile per il carico pagante
Dislocamento
Volume d’acqua spostato dalla carena dipendente dalle condizioni di
carico
Dislocamento Leggero
Navi vuote
Dislocamento Lordo
Navi a pieno carico
Carico pagante lordo
Dislocamento Lordo – Dislocamento Leggero
Dislocamento / Stazza Lorda ≈ 1 ÷ 2 (passeggeri ÷ merci)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Resistenze al moto: tipologie
Forze da vincere per il movimento di un veicolo dislocante
Attrito con acqua Ra + vortici Rv
Onde Ro
Altri fenomeni: aerodinamica, viscosità, interazione con i fondali, forme
anomale della carena e della scabrezza, ecc.
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Resistenze al moto: attrito con
acqua e vortici
Espressione di Tideman
Ra v fSv1,829
f = coefficiente crescente con la scabrezza del materiale e decrescente
con la lunghezza L della carena (mediamente pari a 0,145)
δ = densità relativa dell'acqua (=1 per acqua dolce e =1,026 per acqua di
mare)
V = velocità del natante [m/s]
S = superficie bagnata [m2]
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Resistenze al moto:
generazione
Espressione di Taylor di onde
δ = densità relativa dell'acqua (=1 per acqua dolce e =1,026 per acqua di
mare)
Φ = coefficiente di finezza (o di snellezza) totale
D = dislocamento [t]
V = velocità del natanti [nodi]
L = lunghezza della carena [m]
Possibile riduzione grazie a un bulbo sempre sommerso a prua (bulbo di
Taylor) capace di migliorare la penetrazione idrodinamica dello scafo
attenuando gli effetti dissipativi delle onde divergenti di prua
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Motori marini: requisiti e
Requisiti di progetto per le navi commerciali
tipologie
Massimo rapporto affidabilità / costi operativi
1) Elevata affidabilità per prevenire le conseguenze delle avarie in mare
Ritardi e rischi potenziali
Immobilizzazione di grandi quantità di merci
Immobilizzazione della nave stessa (fattore di produzione chiave)
2) Bassi costi operativi per competere nel libero mercato internazionale
Requisiti di progetto per i motori
Esercizio semplice
Manutenzione semplice e a basso costo
Consumo ridotto di carburanti a basso costo
Tipologie
Generatori di potenza
- Alternativi (vapore, combustione interna)
- Turbine (vapore, gas)
Generatori di spinta
- Aeroreattori
- Idroreattori
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Motori marini: alternativi a
vapore
Origini
1771: Invenzione di Watt
Inizio XIX secolo: installazione sulle navi
Caratteristiche
Caldaia a tubi di fumo (come le locomotive) alimentata da carbone o nafta
Fino a 4 cilindri in serie per massimizzare le espansioni del vapore
Raffreddamento per recuperare il vapore esausto e ritrasformarlo in acqua
Accoppiamento diretto all’asse del propulsore
Prestazioni
Elevata semplicità
Impiego attuale
Limitato a dove i combustibili solidi abbondano (Russia, Africa,
Sudamerica)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Motori
Origini
marini: alternativi Diesel
1912: installazione sulle navi
Caratteristiche
Ciclo a quattro o due tempi con avviamento ad aria compressa
Raffreddamento ad acqua
Possibile sovralimentazione con compressori elettrici o turbine a gas di
scarico
Combustibili economici come la nafta
Presa diretta su albero dell’elica (diesel lenti) o impiego di dispositivi di
riduzione
Retromarcia possibile con arresto e avviamento in senso inverso
Prestazioni
Affidabilità
Basso consumo
Manutenzione e sorveglianza limitate
Impiego attuale
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Motori marini: turbine
Caratteristiche
Necessità di riduttore fra albero motore e albero dell’elica
Necessità di apposita turbina per la retromarcia
Adattabili a essere collocate all’interno dello scafo: costituite da gruppi
separabili
Tipologia a gas di derivazione aeronautica senza caldaia adattata a uso
navale
Massima potenza disponibile entro qualche minuto dalla messa in moto
Prestazioni
Potenza elevata
Volume minore e meno vibrazioni dei Diesel
Possibile sovralimentazione (fino al 50%) senza rischi di avarie
Alte velocità di rotazione (migliaia di giri/minuto)
Costi di costruzione elevati: materiali più resistenti e costosi
Più voluminose e pesanti dei motori diesel
Impiego attuale
Grandi navi
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Propulsori: primi sistemi
meccanici
Remi
Pagaie
Vele
Ruote a pale
Utilizzate nelle prime applicazioni dei motori a vapore
Cattivo funzionamento con onde e immersione variabile
Impiego attuale
Navigazione in acque calme (laghi, fiumi, canali)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Propulsori:
Caratteristiche elica marina
Pale corte e spesse
Bassa velocità di rotazione per limitare la velocità periferica
≥3 pale
Passo fisso o variabile
Costruzione in bronzo o ghisa (meno costosa)
Prestazioni
Diametro ridotto per limitare emersione e pressione sulle pale
Eliche multiple per produrre alta potenza
Eliche ausiliarie in tubi di prua per manovre trasversali
(rotazione fino a 360°)
Impiego attuale
Larga maggioranza delle imbarcazioni motorizzate
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Propulsori: elica aerea
Caratteristiche
Pale lunghe e sottili
Elevata velocità di rotazione
≤3 pale
Passo fisso
Costruzione in acciaio o leghe leggere
Impiego attuale
Idroscivolanti (airboats), aliscafi (hydrofoils) e veicoli a
cuscino d’aria (hovercraft)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Architetture di sistemi di trazione: motori + propulsori UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Origini
Propulsione elettrica
Inizio XX secolo: applicazioni su navi militari (ridotti rumore e
vibrazioni)
Caratteristiche
Motori elettrici alimentati da generatori Diesel
Corrente continua o motori asincroni (dagli anni ‘80)
Prestazioni
Semplicità di manovra
Rendimento elevato del motore elettrico
Gestione degli spazi interni facilitata: struttura compatta senza
ingranaggi e cavi
Capacità di produrre la coppia nominale a tutte le velocità
Ridotta emissione di rumore e vibrazioni
Ridotto fabbisogno di manutenzione: minor numero organi in
rotazione
Affidabilità per ridondanza grazie alla versatilità dei gruppi
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Utilizzo degli spazi su una nave da crociera con propulsione elettrica UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Navigazione in rotta: principi di
sicurezza e distanza d’arresto
Principi di sicurezza
Navi succedentesi lungo una rotta all’interno di una marevia dedicata
Distanza nave-nave compatibile con le manovre di arresto
Arresto improvviso potenzialmente dovuto a cause volontarie o accidentali
(perdita di controllo, avaria ai motori, ecc.)
Fattori rilevanti per la distanza d’arresto
Velocità
Stazza lorda
Lunghezza e forma dello scafo
Manovrabilità
Formula approssimata del PIANC
Da = 4 L (v / 2.5) 0.75 + L
Da = Distanza d’arresto [m], L = lunghezza [m], v = velocità [m/s]
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Navigazione in rotta: dalla
distanza d’arresto alla capacità
della rotta
Ulteriori fattori rilevanti per la distanza di separazione Ds
Eventi meteo-marini (onde, vento, correnti concordi con la rotta): up to +
50%
Errori nella misura della velocità: up to +40%
Correzione addizionale di sicurezza: +20%
Minima distanza di sicurezza
Ds = 2.52 Da
Calibrazione su dati reali di canali regolati da schemi di separazione del
traffico (Canale di Suez, Stretto di Messina, ecc.)
Capacità
Massimo numero unità in navigazione sicura senza congestione in tempo
definito
Φ (v) = v / (Ds + τ v + L) [navi/h]
τ = intervallo fra la decelerazione delle navi in rotta (percezione
rallentamento)
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Controllo e gestione del traffico: Vessel Traffic System (VTS) Trasmissione d’informazioni utili alla navigazione Situazione del traffico marittimo e fattori di potenziale influenza (condizioni meteo, Situazione maree, possibile congestione) Organizzazione del traffico Schemi di separazione e rotte comuni per prevenire incidenti Aree VTS differenziate in zone e rotte (navi obbligate a utilizzarle) Accordo su tempi di arrivo e partenza Fra comando nave e autorità (basati su informazioni sulla situazione traffico) Assistenza alla navigazione Info su velocità e direzione nave, identità e posizione navi vicine (prevenzione di potenziali collisioni) Comunicazioni Radar a breve, medio e lungo raggio supportato da triangolazioni terra- naviUNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018
Controllo e gestione del
traffico: Automatic
Identification System (AIS)
Continuous identification and communication with ships
Passive GPS transponders providing basic information
(Similar to those mounted on planes)
Colloquium between VTS stations and ships within 15 nm covered by VHF
radio
(direct or by bridging on surrounding vessels)
https://www.marinetraffic.com/en/ais/home
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Riferimenti bibliografici
•
Berarducci L., Borzani G., Esu F., Franco L.,
Noli A., Petrossi U., Piciocchi A., Serra M.,
Toniolo A. – Calate portuali e terminali
marittimi. Criteri generali di pianificazione e
costruzione – ESA, Roma, 1984
•
Cantarella G.E. (a cura di) - Sistema di
trasporto: Tecnica ed Economia - UTET
Edizioni Tecniche, Torino, 2007
•
International Maritime Organisation –
International Regulations for Preventing
Collisions at Sea – London, 1981
UNIVERSITÀ DEGLI STUDI DI SALERNO, FISCIANO, 5 – 12 settembre 2018Puoi anche leggere