Sviluppo e validazione di un sistema robotico bio-cooperativo per la riabilitazione ed il reinserimento in contesti lavorativi di soggetti affetti ...
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
LETTERATURA INTERNAZIONALE
Sviluppo e validazione di un sistema robotico
bio-cooperativo per la riabilitazione ed il
reinserimento in contesti lavorativi di soggetti
affetti da patologia muscolo-scheletrica acuta
del distretto di spalla
Federica BRESSI1, Dorotea MANCO1, Sandra MICCINILLI1, Marco BRAVI1, Laura CRICENTI1, Benedetta CAMPAGNOLA1,
Fabio SANTACATERINA1, Christian TAMANTINI2, Francesco SCOTTO DI LUZIO2, Francesca CORDELLA2, Loredana ZOLLO2,
Silvia STERZI1.
1
Unità Operativa Complessa di Medicina Fisica e Riabilitazione, Università Campus Bio-Medico di Roma.
2
Unità di Ricerca di Robotica Avanzata e Tecnologie Centrate sulla Persona – CREO Lab, Università Campus Biomedico di Roma.
Autore di riferimento:
Prof.ssa Federica Bressi
U.O.C. di Medicina Fisica e Riabilitazione, Università Campus Bio-Medico 00128 Roma.
Email: f.bressi@unicampus.it
Abstract venzionale. Gli outcome valutati: do- Conclusioni: I risultati mostrano che
lore (VAS); articolarità e forza di RehabRobo@Work è un device robot-
Introduzione: I sistemi bio-coopera- spalla (Constant Scale - CS); funzion- ico sicuro e di facile applicazione per i
tivi rappresentano una delle ultime alità dell’arto superiore (DASH); pazienti studiati. Tuttavia, studi futuri
frontiere della Riabilitazione e posso- parametri cinematici di movimento con un campione adeguato e un fol-
no essere utilizzati non solo in ambito della spalla (sensori e robot); indice di low-up a lungo termine saranno nec-
neurologico ma anche ortopedico. In gradimento, sicurezza e carico di la- essari per confermare l’efficacia clini-
riabilitazione ortopedica, l’equilibrio voro percepiti durante il trattamento ca del trattamento con RehabRobo@
tra immobilizzazione e ritorno al robotico (QUEST, SAM, NASA-TLX). Work.
movimento impone nel post-acuzie Le valutazioni sono state effettuate
un trattamento riabilitativo graduale alla baseline (T0), dopo 4 settimane
e progressivo e gli ultimi studi stanno Introduzione
(T1) e alla fine del trattamento (T2).
verificando come i robot di ultima Risultati: I punteggi riportati nelle Le patologie muscoloscheletriche del-
generazione possano inserirsi come valutazioni della CS e DASH hanno la spalla rappresentano uno dei prin-
valide e sicure risorse di potenzia- evidenziato in entrambe le scale un cipali argomenti di interesse e di in-
mento della fisioterapia tradizionale miglioramento clinico graduale e pro- tervento nel campo della prevenzione
garantendo tempi e qualità di recupe- gressivo per i 5 pazienti trattati. e tutela della salute dei lavoratori.
ro maggiori. Obiettivo dello studio è L’analisi delle traiettorie registrate dai Attualmente sono riconosciute come
stato quello di verificare la sicurezza e grafici cartesiani in 2D ha mostrato una delle principali cause occupazio-
l’efficacia di un sistema robotico un miglioramento complessivo nali d’invalidità e sono quindi fonte
bio-cooperativo (RehabRobo@Work) nell’esecuzione dei movimenti richi- di rilevanti problemi sanitari e sociali
applicato nel recupero motorio e fun- esti, in particolare dell’escursione ar- e di costi economici che incidono su
zionale della spalla in seguito a frattu- ticolare in elevazione di spalla. Infine, bilanci, strategie occupazionali e poli-
ra di omero o riparazione chirurgica i pazienti hanno espresso indici di tiche socio-economiche [1]. Il dolore,
della cuffia dei rotatori. gradimento medio-elevati al tratta- la limitazione articolare e l’impotenza
Materiali e Metodi Sono stati ar- mento robotico (VAS 9.2/10, QUEST funzionale che ne conseguono, predi-
ruolati 5 pazienti e sottoposti ad 8 set- 4.5/5, SAM 7.6/9), mostrando invece spongono inoltre ad un aumentato
timane di trattamento robotico arto una certa eterogeneità nella percezi- rischio di assenza e/o di re-infortunio
superiore (mediante RehabRobo@ one del carico di lavoro (NASA-TLX sul posto di lavoro, secondo solo alla
Work) associato a trattamento con- 35.2/100). lombalgia [2]. Nel caso specifico delle
62 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa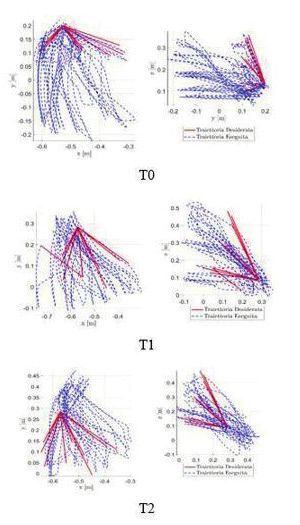
LETTERATURA INTERNAZIONALE
affezioni muscolo-scheletriche acute tuttavia la mancanza di un utilizzo si- scheletrica acuta di spalla. I soggetti
di spalla, come la frattura prossimale stematico della tecnologia robotica sono stati reclutati presso gli ambula-
di omero e la ricostruzione chirurgica nella riabilitazione ortopedica dell’ar- tori della UOC di Medicina Fisica e
della cuffia dei rotatori, il trattamento to superiore in particolare perché gli Riabilitativa del Policlinico Universi-
riabilitativo richiede tempi ed obietti- schemi di interazione uomo-macchi- tario Campus Bio-Medico di Roma e
vi ben strutturati, quali: controllo del na di questi sistemi operativi non ri- provenivano dall’UOC di Ortopedia e
dolore, recupero dell’escursione arti- sulta sempre adeguato a questa cate- Traumatologia dello stesso Policlini-
colare, miglioramento del tono-trofi- goria di pazienti [5]. co. L’arruolamento è iniziato a set-
smo muscolare, rieducazione pro- I sistemi di tipo bio-cooperativo [8], tembre 2019 ed è tutt’ora in corso.
priocettiva e del gesto occupazionale una delle ultime frontiere della Robo- Sono stati considerati idonei tutti i
[3,4]. La necessità di immobilizzazio- tica, sono stati sviluppati per sopperi- pazienti che rispettavano i seguenti
ne e ritorno al movimento che si in- re a questa difficoltà: utilizzando piat- criteri di inclusione: postumi di inter-
staura nella fase post-acuzie, impone taforme multi-modali, sono in grado vento chirurgico di riparazione della
che sicurezza e gradualità siano i re- di modulare l’attività erogata dal ro- cuffia dei rotatori e/o di frattura ome-
quisiti fondamentali alla base del trat- bot in base alle informazioni bio-mec- rale prossimale trattata in modo con-
tamento riabilitativo; in tale contesto, caniche e psico-fisiologiche del sog- servativo e/o chirurgico e con indica-
la ricerca si sta muovendo affinché i getto con cui interagiscono, registrate zione ortopedica ad iniziare il tratta-
robot possano inserirsi come valide e ed integrate mediante appositi senso- mento riabilitativo; ROM di flessione
sicure risorse di potenziamento della ri [9,10]. I sistemi bio-cooperativi, di spalla possibile a 90°; Mini-Mental
fisioterapia tradizionale [5]. Uno dei consentendo un’interazione bi-dire- State Examination (MMSE) ≥24; 18
primi studi realizzati è quello di zionale tra robot e uomo, contribui- anni di età compiuti. I criteri d’esclu-
Schwickert et al. [6], che descrissero scono ad un’inclusione attiva di sione sono stati: fratture secondarie a
l’impiego di un esoscheletro (Ar- quest’ultimo nel circuito di controllo malattia neoplastica o spontanee da
meo-Spring, Hocoma AG, Switzer- della macchina. Tali promettenti ca- fragilità, frattura di omero trattata con
land) nella riabilitazione post-inter- ratteristiche hanno inevitabilmente protesi di spalla, compresenza di al-
vento di frattura prossimale di omero stimolato la sperimentazione di siste- go-neuro-distrofia, deficit neuro-va-
in pazienti geriatrici. I risultati mo- mi bio-cooperativi in ambito riabilita- scolari sensitivi e motori dell’arto su-
strarono che l’Armeo-Spring era sicu- tivo [9]. periore interessato, deformità articola-
ro ed efficace, i partecipanti allo stu- Stando al consistente impatto che le ri, pregressi interventi a carico del
dio inoltre erano molto soddisfatti e patologie muscolo-scheletriche del l’apparato muscolo-scheletrico dell’ar-
motivati a completare il percorso ria- l’arto superiore hanno sulla qualità di to interessato che pregiudicavano l’e-
bilitativo proposto. I risultati eviden- vita dei soggetti affetti e considerando ventuale utilizzo del robot, soggetti
ziarono miglioramenti nel coinvolgi- la versatilità e l’adattabilità dei sistemi che non avevano espresso il consenso
mento dell’arto superiore in attività robotici bio-cooperativi, informato. Le caratteristiche dei pa-
della vita quotidiana, valutate tramite lo scopo del presente studio è stato di zienti arruolati sono riassunte in Ta-
DASH, JAMAR SH5001 (test dina- validare l’efficacia e la sicurezza del bella I. Nel corso del trattamento è
mometrico per la forza di presa) e la sistema RehabRobo@Work, che oltre stato consentito l’utilizzo di terapie
Wolf Motor Function Test. Tuttavia a migliorare i tempi e la qualità di re- farmacologiche/strumentali per un
l’interpretazione dei dati è limitata da cupero della spalla dopo frattura di adeguato controllo del dolore, men-
una piccola dimensione del campione omero (operata o non operata) o ri- tre non sono stati ammessi tratta-
e dalla mancanza di un follow-up a parazione della cuffia, evidenziasse il menti riabilitativi all’infuori di quelli
lungo termine. Padilla et al. [7] inve- vantaggio di un sistema in grado di previsti dal protocollo. La compliance
ce presentarono uno studio il cui “cooperare” con il paziente, monito-
del soggetto è stata verificata median-
obiettivo era quello di valutare l’adat- rando seduta dopo seduta non solo le
te la registrazione della presenza gior-
tabilità di un device robotico (PER- sue prestazioni ma anche lo stress fi-
naliera alla seduta di trattamento.
CRO-BRANDO) da loro sviluppato sico legato sia al trattamento che alla
nel trattamento delle problematiche Lo studio ha ricevuto l’approvazione
fase del recupero biologico e consen-
ortopediche dell’avambraccio, in par- del Comitato Etico del Policlinico
tisse l’identificazione di un program-
ticolare in postumi di frattura di polso Campus Bio-Medico di Roma.
ma riabilitativo sempre più bilanciato
o gomito. I risultati decretarono un e personalizzato per le esigenze del Il sistema robotico
miglioramento degli outcome consi- singolo.
derati, come il dolore (VAS), il ROM Il sistema RehabRobo@Work (Figura
di gomito e polso, la forza di presa 1) è stato progettato inizialmente per
manuale (Jamar test) e la funzionali-
Materiali e metodi la riabilitazione di soggetti vittime di
tà dell’arto superiore (DASH). Regi- È stato realizzato uno studio pilota infortuni sul lavoro o colpiti da ma-
strarono inoltre un buon livello di si- per la validazione di un sistema robo- lattie professionali riguardanti l’arto
curezza durante l’erogazione del trat- tico bio-cooperativo (RehabRobo@ superiore. In seguito il suo ambito di
tamento nonostante il ridotto nume- Work) per la riabilitazione ed il rein- applicazione è stato esteso anche ad
ro di pazienti. serimento in contesti lavorativi di altre popolazioni di pazienti con le
Dall’analisi della letteratura emerge soggetti affetti da patologia muscolo- stesse problematiche riguardanti l’ar-
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 63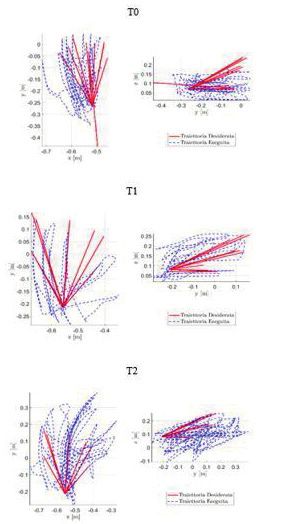
LETTERATURA INTERNAZIONALE
Tabella I. Caratteristiche dei pazienti.
Paziente Sesso Età Intervento Chirurgico Tutore Immobilizzazione (gg) FKT pre-robot
in AS operato (intervallo tra l’intervento (n. sedute)
chirurgico e l’inizio della FKT)
1 F 44 Riparazione della cuffia dei rotatori + tenotomia CLB 4 settimane 15 gg 40 sedute
2 F 75 Osteosintesi con chiodo endomidollare per frattura 5 settimane 35 gg 7 sedute
pluriframmentaria diafisaria di omero
3 M 55 Riparazione della cuffia dei rotatori 4 settimane 12 gg 16 sedute
4 F 68 Riparazione della cuffia dei rotatori 4 settimane 14 gg 10 sedute
5 F 78 Osteosintesi con chiodo endomidollare + viti per 5 settimane 37 gg 30 sedute
frattura della testa omerale e viti + placca per frattura
dell’olecrano
zio con compensazione decrescente
(esercizi assisted-as-needed) del
peso del braccio sulla base di una
funzione di modulazione associata
a soglie predefinite (25%, 50%,
75%, 100%) del peso dell’arto del
paziente;
•• Fase 2: training contro-resistenza
per allenare la forza muscolare (il
robot ha applicato una forza con-
tro-resistente di 0.5 kg).
Il passaggio alla Fase 2 avveniva
quando il soggetto era in grado di
compensare autonomamente il peso
del suo braccio e aveva raggiunto un
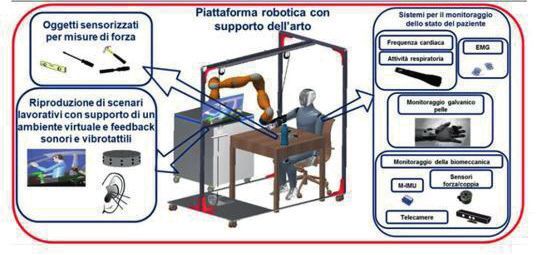
Figura 1 Sistema RehabRobo@Work
ROM di 180° per l’elevazione della
spalla.
to superiore (spalla). L’obiettivo è di robotico in associazione al program- Fase 2 (4 settimane, 20 sedute): i pa-
somministrare trattamenti riabilita- ma di esercizi convenzionali specifici zienti venivano divisi in 2 sottocate-
tivi motori e di coordinamento vi- per la spalla [11-13]. Le prime 4 setti- gorie previa randomizzazione sempli-
suo-motorio for temente personaliz- mane sono state dedicate al recupero ce: A) movimentazione carichi e B)
zati. articolare e le successive 4 al recupero riproduzione del gesto del martellista.
del gesto lavorativo. A) È stato sottoposto a 30’ di attività
Il sistema è composto da:
Fase 1 (4 settimane, 20 sedute): ogni di reaching con il fisioterapista per
1. Un braccio robotico antropomorfo
seduta di terapia prevedeva 30’ di recuperare/mantenere il ROM e a
KUKA Light Weight Robot 4+;
trattamento tradizionale (esercizi di 30’ di trattamento robotico consi-
2. Un supporto motorizzato per lo
mobilizzazione passiva, attiva e atti- stente in attività di posizionamen-
sgravio del peso del braccio;
va-assistita, esercizi di rinforzo e po- to di oggetti su uno scaffale semi-
3. Un sistema di interfaccia multimo-
sturali propriocettivi di spalla) e 30’ di circolare (±30°) con incremento
dale, costituito da un sistema EMG crescente della resistenza del robot
e da unità magneto-inerziali; terapia robotica della spalla. Durante
la fase di trattamento tradizionale, fino a 5 kg.
4. Un sistema di realtà virtuale per B) È stato sottoposto a 30’ di attività
l’interazione tra terapista e paziente
riprodurre lo scenario lavorativo; di reaching con terapista per recu-
era registrata, previa autorizzazione,
5. Sensori per il monitoraggio dei pa- perare/mantenere il ROM e 30’ di
tramite sistemi per l’analisi del movi-
rametri fisiologici (i.e. Shimmer3 trattamento robot-assistito di mar-
mento (telecamere RGB-D, sensori
GSR+ Unit e BioHarness 3); tellamento su piani di lavoro diffe-
M-IMU) e sono stati inoltre monito-
rati i parametri fisiologici (FR, FC) del renti.
I diversi dispositivi sono connessi tra- In entrambe le fasi l’incremento della
paziente tramite sensori indossabili
mite il sistema di messaggistica YARP. (i.e. Shimmer3 GSR+ Unit e BioHar- resistenza del robot è stato basato sul-
ness 3). la valutazione degli indicatori di per-
Intervento formance con una strategia a soglia.
I soggetti arruolati hanno effettuato 8 La terapia robotica era divisa in due
settimane di trattamento e 40 sedute fasi:
Outcomes misurati
di riabilitazione. Durante ogni seduta •• Fase 1: attività di reaching robot-as- Obiettivo primario della presente spe-
effettuavano trattamento riabilitativo sistita in diverse direzioni dello spa- rimentazione è stato verificare l’effica-
64 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa
LETTERATURA INTERNAZIONALE
cia del trattamento robotico, unita- •• Quebec User Evaluation of Sati- pia pre-trattamento robotico è stato
mente alla fisioterapia tradizionale. Gli sfaction with Technical Aids - di 18,6 sedute (7-40 sedute). Tra i 5
outcome primari considerati sono stati: QUEST, con valutazione della sod- pazienti arruolati, si è verificato un
•• Il miglioramento dell’articolarità, disfazione dell’utente nei confron- solo drop-out successivo alla 32° se-
della forza e della funzionalità del- ti dell’ausilio adottato, in una scala duta di trattamento robotico e su base
la spalla trattata; di 40 punti da dividere per gli 8 volontaria del paziente. I restanti pa-
•• La riduzione del dolore; item considerati (dimensioni, zienti hanno aderito al 100% al pro-
•• Il miglioramento della cinematica peso, facilità di regolazione, sicu- tocollo di trattamento. Durante l’in-
articolare e dell’attività muscolare rezza, durabilità, facilità d’uso ed tero periodo di osservazione, non si
dell’arto superiore durante l’ese- efficacia dell’ausilio). sono verificati eventi avversi o com-
cuzione del gesto lavorativo, mi- La somministrazione dei questionari plicanze relative all’intervento o alle
surate mediante robot e sensori di valutazione del dispositivo è stata fasi di valutazione. Data l’esiguità del
per valutare le forze. effettuata al tempo T2. campione di pazienti oggetto dello
La valutazione è stata effettuata tra- studio non è stato possibile condurre
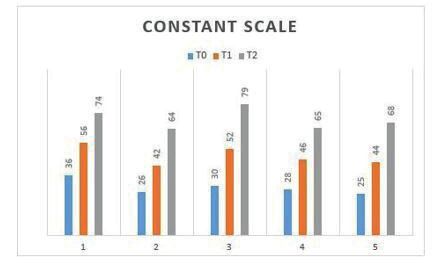
mite la Constant Murley Scale (CS) un’analisi statistica ed è stato ritenuto
per dolore, range of motion (ROM) e
Risultati opportuno posticipare il report dei
forza, in una scala complessiva di 100 Ad oggi sono stati arruolati 5 pazienti parametri vitali, cinematici e dinami-
punti, mentre la Disability of Arm, (4 donne ed 1 uomo - età media: 64 ci rilevati dal robot nonché l’analisi di
Shoulder and Hand Scale (DASH) è anni), che nella seconda fase del per- confronto tra i due gruppi al momen-
stata utilizzata per valutare il livello di corso riabilitativo sono stati così ran- to in cui si disporrà di un’adeguata
funzionalità dell’arto superiore ri- domizzati: 2 pazienti nel gruppo A e 3 dimensione campionaria. Per le stesse
spetto a determinate attività del vive- pazienti nel gruppo B. Le caratteristi- ragioni abbiamo ritenuto opportuno
re quotidiano, in una scala complessi- che della popolazione sono riportate considerare anche i dati relativi al pa-
va di 75 punti. nella Tabella I: tre pazienti sono stati ziente 4, nonostante il drop-out su
I parametri vitali, le forze di interazio- sottoposti a riparazione chirurgica base volontaria.
ne tra uomo e robot, la cinematica della cuffia dei rotatori, mentre gli al-
articolare e l’attività muscolare del tri due hanno effettuato un interven- Analisi outcome primari
l’arto superiore durante le attività de- to di osteosintesi post frattura omera- Sia per la CS che per la DASH si è do-
gli scenari lavorativi proposti sono le. Il tempo medio trascorso tra l’in- cumentato un diverso livello di recu-
stati valutati tramite i sensori indos- tervento chirurgico e l’inizio della fi- pero nel singolo paziente e nel con-
sati dal soggetto e quelli integrati nel sioterapia è stato di 22,6 giorni (12- fronto tra i 5 pazienti. Tuttavia, l’an-
sistema robotico e negli oggetti. 37gg). Un tutore spalla-gomito è stato damento dei punteggi relativi alla CS
Le valutazioni degli outcome primari indossato dopo l’intervento chirurgi- e alla DASH esprime in entrambi i
sono state effettuate al tempo: T0 co per 4 settimane nei pazienti con casi un miglioramento graduale e
(prima del trattamento), T1 (al termi- riparazione di cuffia e 5 settimane in progressivo (Tabelle II e III), come
ne della Fase 1) e T2 (al termine della quelli post-osteosintesi dell’omero. Il confermato dall’analisi grafica del
Fase 2). numero medio di sedute di fisiotera- l’andamento nel tempo di valutazio-
Obiettivo secondario è stato sviluppa-
re un sistema robotico 3D fortemente
adattativo, in grado di promuovere il Tabella II. Constant Scale al tempo T0, T1, T2
coinvolgimento attivo e di stimolare il Paziente T0 T1 T2
coordinamento visuo-motorio du-
1 36/100 56/100 74/100
rante l’esecuzione del task motorio,
verificato mediante i seguenti que- 2 26/100 42/100 64/100
stionari di gradimento: 3 30/100 52/100 79/100
•• NASA-TLX Scale, con valutazione 4 28/100 46/100 65/100*
del carico di lavoro in una scala a * valutata alla 32° seduta
100 punti e media pesata di sei
5 25/100 44/100 68/100
sottoscale (richiesta mentale, ri-
chiesta temporale, richiesta fisica,
prestazione, sforzo e frustrazione);
Tabella III. DASH al tempo T0, T1, T2
•• Scala Figurativa-non verbale
Self-Assessment Manikin - SAM, Paziente T0 T1 T2
con valutazione del livello di pia- 1 49/75 36/75 21/75
cere e di stress generati dall’inte- 2 60/75 48/75 32/75
razione con il robot, in due rispet-
3 53/75 37/75 23/75
tive scale con punteggio da 1 a 9;
•• Scala visuo-analogica del grado di 4 59/75 45/75 28/75*
* valutata alla 32° seduta
soddisfazione del robot - VAS, con
5 60/75 45/75 30/75
punteggio da 0 a 10;
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 65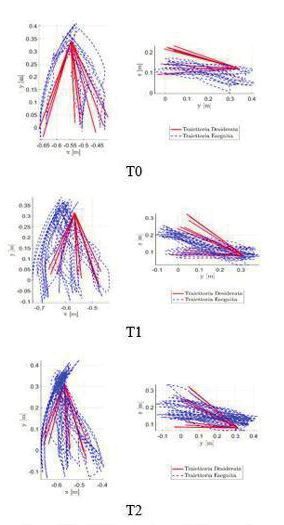
LETTERATURA INTERNAZIONALE
ria di movimento attesa e quella ese-
guita dal paziente. In particolare,
sono stati considerati il movimento di
reaching antero-posteriore del target
(piano trasverso) ed il movimento di
reaching del target in elevazione (pia-
no sagittale). I grafici cartesiani (Fi-
gure 4-8), mostrano un complessivo
miglioramento ed una riduzione della
dispersione grafica delle traiettorie
eseguite rispetto a quelle attese sia
nel movimento di reaching ante-
ro-posteriore che nel movimento di
reaching in elevazione. Tale anda-
mento depone a favore di un miglio-
ramento in termini di escursione arti-
colare, soprattutto nel movimento di
elevazione dell’arto operato (confer-
Figura 2 Dash T0, T1, T2
mato in 4 pazienti su 5). Tuttavia,
dall’analisi dei grafici dei singoli pa-
zienti, si osserva una discreta variabi-
lità nei tre tempi di valutazione sia
nello studio del singolo che dal con-
fronto complessivo.
Analisi outcome secondari
I risultati dei questionari di gradi-
mento e valutazione del robot sono
riportati in Tabella VI. Il grado di
soddisfazione e di gradimento del ro-
bot, espressa attraverso la VAS e il
QUEST, hanno ottenuto un punteg-
gio medio-elevato (VAS: 9.2/10 vs
QUEST – item relativi all’ausilio robo-
tico: 4.6/5). Le caratteristiche del de-
vice più apprezzate sono state: facilità
Figura 3 Constant Scale T0, T1, T2 d’uso, facilità di regolazione, stabilità
e sicurezza. La scala NASA-TLX ha
permesso di indagare il carico di lavo-
ro (work-load) percepito: è stata os-
ne (Figure 2 e 3). Dall’analisi dei dati Tabella V. Variazione assoluta e % della DASH servata una discreta eterogeneità nel
è stato possibile ricavare la variazione Valutazioni Variazione Variazione confronto tra i singoli punteggi, con
assoluta (VA) e la variazione percen- Dash Assoluta Percentuale uno score medio di 35.2/100. Richie-
tuale (VP) dei valori di entrambe le T0-T1 -14 -24,9 sta fisica, sforzo e prestazione sono
scale (Tabelle IV e V), che confer- stati gli item ad aver maggiormente
T1-T2 -15,4 -36,5
mano quanto sopra riportato. In en- contribuito all’innalzamento del sud-
trambe le scale, la variazione più con- T0-T2 -29,4 -52,3 detto punteggio. Infine, i risultati del-
sistente di VP e VA è stata osservata la scala Figurativa-non verbale S.A.M
dal confronto T0-T2. L’analisi delle variazioni T0-T1 e T1-T2, mostra sono stati mediamente di 7.6/9 per il
come entrambe le scale mantengano livello di compiacimento/apprezza-
un lieve incremento nella VA (in T0- mento del robot e 2.4/9 per il livello
Tabella IV. Variazione assoluta e % della Con- T1 CS 19, DASH -14 vs in T1-T2: CS 22, di stress/carico emotivo.
stant Scale
DASH -15,4), mentre nella VP il trend
si conferma per la DASH (-24.9% in
Valutazioni
CS
Variazione
Assoluta
Variazione
Percentuale T0-T1 vs -36.5% in T1-T2), ma non per
Discussione
T0-T1 19 65,5 la CS (65.5% in T0-T1 vs 45.8% in T1- I risultati, sebbene preliminari, per-
T1-T2 22 45,8
T2). Lo studio delle traiettorie docu- mettono di considerare RehabRobo@
mentate dai grafici cartesiani 2D ha Work un device robotico sicuro e di
T0-T2 41 141,4
permesso un confronto tra la traietto- facile applicazione nella categoria dei
66 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa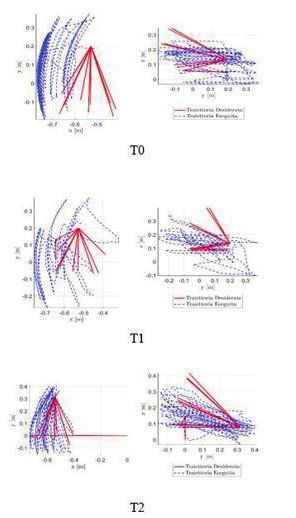
LETTERATURA INTERNAZIONALE
Figura 4 Traiettorie attese/eseguite Paziente 1: Figura 5 Traiettorie attese/eseguite Paziente 2:
sx: reaching antero-posteriore (piano cartesiano xy); sx: reaching antero-posteriore (piano cartesiano xy);
dx: reaching in elevazione (piano cartesiano yx) dx: reaching in elevazione (piano cartesiano yx)
pazienti studiati. Tale considerazione Tabella VI. Questionari di gradimento e di valutazione del Robot al tempo T2
è supportata non solo dai punteggi
medio-elevati osservati nei question- Paziente VAS soddisfazione NASA-TLX Scale QUEST S.A.M.
Robot Ausilio
ari di gradimento, soddisfazione e ris-
posta emotiva al trattamento roboti- 1 9/10 65.67 4/5 compiacimento 7/9
stress 2/9
co, ma anche dall’assenza di eventi
avversi. Un dato che merita una rif- 2 10/10 11.67 5/5 compiacimento 9/9
stress 6/9
lessione a parte è sicuramente la dis-
creta eterogeneità riscontrata nella 3 10/10 29.67 4.8/5 compiacimento 8/9
valutazione del “carico di lavoro” per- stress 1/9
cepito dal paziente ed espresso medi- 4 7/10 54.67 4.5/5 compiacimento 5/9*
ante questionario NASA-TLX: 2 pazi- stress 5/9
enti hanno infatti manifestato un car- * valutata alla 32°
seduta
ico di lavoro molto superiore rispetto
a quello percepito dagli altri (Tabella 5 10/10 14.33 5/5 compiacimento 9/9
stress 3/9
VI). Questo dato potrebbe trovare
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 67
LETTERATURA INTERNAZIONALE Figura 6 Traiettorie attese/eseguite Paziente 3: Figura 7 Traiettorie attese/eseguite Paziente 4: sx: reaching antero-posteriore (piano cartesiano xy); sx: reaching antero-posteriore (piano cartesiano xy); dx: reaching in elevazione (piano cartesiano yx) dx: reaching in elevazione (piano cartesiano yx) spiegazione nella storia clinica del pa- questa interessante considerazione come clinici sono stati rilevati attra- ziente e nella indiscutibile soggettivi- meriterebbe ulteriori analisi in futuro verso la CS ed il questionario DASH. tà percettiva del trattamento riabilita- con un campione di pazienti di mag- Abbiamo ritenuto opportuno l’utiliz- tivo. Nonostante tale discrepanza, per giore dimensione. L’“impegno fisico”, zo di queste due scale di valutazione ciascun paziente i dati relativi al NA- lo “sforzo” e la “prestazione” richiesti poiché in grado non solo di saggiare SA-TLX sono in linea con i punteggi dal device sono stati gli item ad aver pe- in modo semplice e completo gli out- di gradimento dell’ausilio e della ris- sato maggiormente nello score finale come di principale interesse nella ri- posta emotiva al robot derivati dal del NASA-TLX, mentre scarso, se non abilitazione della spalla, ma anche di QUEST. Sembra, inoltre, che il carico addirittura assente, è stato il contributo esprimere indirettamente il benessere di lavoro percepito sia maggiore nei dell’item “frustrazione”: quest’ul timo clinico e la qualità di vita del pazi- pazienti sottoposti ad intervento dato, contestualizzato con le attuali ente. La CS indaga il dolore (gravità e chirurgico di riparazione di cuffia, in- evidenze scientifiche, fa ben supporre caratteristiche temporali), il ROM (el- dipendentemente dall’età e dal nu- circa la capacità del robot di con- evazione, abduzione, rotazione inter- mero di sedute di fisioterapia prope- tribuire positivamente alla compli- na ed esterna) e la forza del distretto deutiche al trattamento robotico: ance del paziente [14,15]. Gli out- di spalla, mentre il questionario 68 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa
LETTERATURA INTERNAZIONALE
ulteriormente confermato dall’impat-
to visivo dei grafici relativi all’anda-
mento temporale dei punteggi di en-
trambe le scale (Figure 2 e 3) e
dall’analisi quantitativa della VA e VP
rilevata nei tre intervalli di tempo
considerati (Tabelle IV e V). Tutta-
via, il trend di miglioramento regis-
trato con la VP ha un comportamento
diverso per le due scale: se per la
DASH si mantiene una variazione ad
incremento positivo pressoché cos-
tante nei due intervalli, per la CS la
VP tra T1-T2 è minore rispetto a quel-
la tra T0-T1. Si può supporre che esso
trovi giustificazione sia nella tipologia
di outcome valutati dalla CS sia nelle
caratteristiche del protocollo riabilita-
tivo utilizzato. Il miglioramento di
outcome clinici come il dolore e l’ar-
ticolarità è infatti generalmente tan-
gibile soprattutto nelle prime setti-
mane di trattamento e alla stregua di
una fisioterapia incentrata sul recu-
pero articolare, muscolare e pro-
priocettivo: non sarebbe pertanto da
escludere l’ipotesi che un trattamento
riabilitativo di tipo occupazionale, ab-
bia determinato un miglioramento
più consistente in termini di attività
quotidiane, come mostrato dalle vari-
azioni della DASH. Partendo da
queste osservazioni preliminari, e
considerando le potenzialità bio-co-
operative del robot, si potrebbe giun-
gere ad indicazioni più precise per
indirizzare correttamente gli accorgi-
Figura 8 Traiettorie attese/eseguite Paziente 5: menti terapeutici necessari a mas-
sx: reaching antero-posteriore (piano cartesiano xy); simizzare l’efficacia del trattamento.
dx: reaching in elevazione (piano cartesiano yx) La possibilità di integrare le infor-
mazioni cliniche e soggettive descritte
da CS e DASH, con quelle biomecca-
DASH ne valuta la funzionalità in at- sono migliorati in modo sensibile ot- niche e psico-fisiologiche registrate
tività semplici e complesse. Dai punt- tenendo, in alcuni pazienti, il massi- dal robot, a nostro giudizio permet-
eggi a T0 si osserva una certa eteroge- mo punteggio consentito. Forza, ro- terà infatti una più chiara comprensi-
neità nei valori rilevati sia dalla CS tazione interna e rotazione esterna di one non solo degli effettivi progressi
che dalla DASH: questo dato potrebbe spalla, pur registrando un graduale riabilitativi, ma anche delle strategie
trovare giustificazione nel diverso miglioramento, non hanno raggiunto terapeutiche migliori per il paziente.
background anamnestico e fisiopato- mai il massimo punteggio previsto. Inoltre, il confronto tra gruppo speri-
logico del paziente (come l’età ed il Analogamente, osservando i punteg- mentale e gruppo di controllo per-
tipo di intervento chirurgico subìto) e gi della DASH al tempo T2, tutti i pa- metterà di saggiare il contributo e gli
nel numero di sedute di FKT effettu- zienti inclusi hanno espresso un certo eventuali vantaggi derivati dal tratta-
ate prima del trattamento robotico. In livello di difficoltà esecutiva nell’item mento robotico bio-coperativo rispet-
particolare, l’analisi delle valutazioni riguardante le attività richiedenti un to a quello tradizionale, in linea con
con CS ha mostrato come non tutti gli considerevole impegno fisico e/o un Molteni e collaboratori [15], che con-
item considerati abbiano ottenuto lo ROM articolare scevro da sintomato- siderano il “movimento” non come
stesso margine di recupero nelle di- logia dolorosa: è dunque evidente atto motorio fine a se stesso, ma so-
verse fasi di follow-up: gli item rela- una correlazione tra i limiti articolari prattutto come percezione ed espe-
tivi alle attività quotidiane, il dolore, evidenziati dalla CS e quelli funzion- rienza qualitativa. Un device robotico
l’elevazione e l’abduzione di spalla ali rilevati dalla DASH. Questo dato è bio-cooperativo potrebbe offrire un
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 69
LETTERATURA INTERNAZIONALE
sensibile contributo in tal senso. In- reinserimento del paziente nei conte- nale per l’Assicurazione contro gli In-
fine dal confronto tra traiettorie at- sti lavorativi e quotidiani di apparte- fortuni sul Lavoro (INAIL)
tese ed eseguite registrate dal robot nenza. In tal senso, sarebbe interes-
nei tre tempi di valutazione, emerge sante indagare, con adeguato fol- Corsi, convegni o congressi
un miglioramento nella precisione, low-up, se ed in quale misura l’im-
nell’escursione articolare e nel raggi- piego di un device robotico di tipo Il presente lavoro è stato presentato
ungimento effettivo del target, sep- bio-cooperativo possa fare la differen- al Maker Faire del 2019
pur di grado variabile da paziente a za in termini di rieducazione al movi-
paziente. Alla luce di quanto fino ad mento e consolidamento delle strate- Bibliografia
ora discusso, riteniamo che i dati pre- gie motorie corrette, impattando sul
1. Linaker C.H., Walker-bone K. et al.
liminari emersi dallo studio possano rischio di recidiva e – conseguente- Shoulder disorders and occupation.
essere un buon punto di partenza ed mente – sulla qualità di vita del sog- Best Pract rES clin Rheumatol. 2015;
un ottimo incentivo per la realizzazi- getto. 29(3); 405-423.
one di protocolli riabilitativi personal- 2. Pekkala J., Rahkonen O. et al. Sickness
absence due to different musculoskele-
izzati con RehabRobo@Work nella Conclusioni tal diagnoses by occupational class: a
popolazione considerata. I dati rela- register-based study among 1.2 million
tivi alla risposta psicologica ed emoti- Tenendo conto dei limiti dello studio, Finnish employees. Occup Environ
va dei 5 pazienti trattati e i risultati è possibile affermare che RehaRobo@ Med. 2018; 75: 296-302
ottenuti dalle valutazioni cliniche e Work si è dimostrato un device robot- 3. Nikolaidou O., Migkou S. et al. Reha-
ico sicuro e applicabile nella categoria bilitation after rotator cuff repair. The
robotiche preliminari, evidenziano Open Orthopaedics J. 2017; 11:154-
non solo un miglioramento degli out- dei pazienti studiati, aprendo la possi-
162 78
come primari, ma anche la sicurezza bilità all’utilizzo del robot in ambito 4. Di Giacomo G., Fratture d’omero trat-
e l’appropriatezza del trattamento e ortopedico. tate con placca e viti a stabilità angola-
l’effettivo contribuito del device alla Il training mediante robot può essere re, Febbraio 2019, Spalla.it, https://
dunque considerato una possibilità www.spalla.it/trattamento-chirurgi-
terapia tradizionale. co-delle-frat-ture-di-spalla.
nella riabilitazione ortopedica di
5. Sicuri C., Porcellini G. et al. Robotics in
Limiti spalla. Tuttavia ad oggi le evidenze shoulder rehabilitation Muscles Liga-
sono limitate principalmente all’am- ments Tendons J 2014 Apr-Jun; 4(2):
Alla luce delle suddette osservazioni, bito neurologico: la conduzione di 207–213.
si afferma innanzitutto la necessità di uno studio randomizzato controllato 6. L. Schwickert, J. Klenk, et al. Robo-
uno studio clinico randomizzato con- in singolo cieco, realizzato su adegua- tic-assisted rehabilitation of proximal
trollato e condotto su adeguato cam- humerus fractures in virtual environ-
to campione e con valutazione inte- ments: a pilot study. Zeitschrift f¨ur Ge-
pione. grata dei parametri rilevati dal robot e rontologie und Geriatrie. 2011; 44
Un limite dello studio è rappresentato dal clinico, permetterebbe sia di con- (6):387–392.
dalla mancanza di scale di valutazio- fermare o meno i risultati preliminari 7. Padilla-Castañeda M.A, Sotgiu E. An
ne che prendano in considerazione i raccolti, che ad oggi sembrano essere Orthopaedic Robotic-Assisted Rehabi-
parametri bio-meccanici e psico-fisio- litation Method of the Forearm in Vir-
a favore di RehaRobo@Work nel trat- tual Reality Physiotherapy. J Health
logici registrati dal robot: l’utilizzo tamento della popolazione studiata. Eng. 2018; 7438609
adeguato di questo tipo di scale con- Inoltre, il prolungamento del fol- 8. Simonetti D., Zollo L. et al. Reprint of
sentirebbe di creare un trattamento low-up con valutazioni a medio e multimodal adaptive interfaces of 3D
sempre più “customizzato” alle esi- lungo termine, offrirebbe la possibil- robot-mediated upper limb neu-
genze del paziente, massimizzando gli ro-rehabilitation: an overview of
ità di saggiare l’effettivo valore aggi- bio-cooperative systems. Robot. Au-
effetti terapeutici e la compliance pa- unto della terapia robotica bio-coop- ton. Syst. 2017; 90: 86-96.
ziente-robot [16]. Queste scale inol- erativa a quella tradizionale nel con- 9. Rodriguez G.C., Fraile M. J. et al. Bio
tre contribuirebbero a confermare o solidamento di strategie motorie utili cooperative robotic platform for motor
meno i dati preliminari raccolti ed e sicure per il reinserimento nei con- function recovery of the upper limb
eventualmente a stimolare ulteriori after stroke. Annu Int Conf IEEE Eng
testi di appartenenza. Tale studio non
Med Biol Soc. 2010; 2010: 4472-5.
riflessioni a riguardo. sarebbe poi da intendersi fine a se st- 10. Scotto di Luzio F., Simonetti D. et al.
Considerando poi l’impatto epide- esso: esso andrebbe inevitabilmente Bio-Cooperative Approach for the Hu-
miologico delle patologie musco- ad ampliare la casistica attuale e le man-in-the-Loop Control of an
lo-scheletriche acute nella popolazio- evidenze scientifiche circa gli effetti e End-Effector Rehabilitation Robot.
ne adulta/lavorativa, unitamente allo Front Neuro-robot. 2018;12: 67.
gli eventuali vantaggi della terapia ro-
11. Thigpen CA, Shaffer MA, et al. The
scadimento della qualità di vita botica rispetto al trattamento tra- American Society of Shoulder and El-
dell’individuo che ne è affetto, rite- dizionale in ambito ortopedico. bow Therapists’ consensus statement
niamo che tale studio - se condotto on rehabilitation following arthrosco-
con i requisiti adeguati - possa offrire pic rotator cuff repair. J Shoulder El-
Finanziamenti e contributi bow Surg. 2016 Apr;25(4):521-35. doi:
un sensibile contributo a migliori
strategie riabilitative. Quest’ultime
educazionali 10.1016/j.jse.2015.12.018. PMID:
26995456.
non devono intendersi solo ai fini del Il presente studio ha ricevuto finan- 12. Jung C, Tepohl L, et al. Rehabilitation
trattamento, ma anche riguardo al ziamenti da parte dell’Istituto Nazio- following rotator cuff repair: A work of
70 Vol. 36 - N. 3 - Giornale italiano di Medicina RiabilitativaLETTERATURA INTERNAZIONALE
the Commission Rehabilitation of the 10.1007/s11678-018-0448-2. Epub book of Robotics. Springer. 2016.
German Society of Shoulder and El- 2018 Feb 22. PMID: 29527239; 15. Molteni F., Gasperini G. et al. Exoske-
bow Surgery e. V. (DVSE) in collabora- PMCID: PMC5834570. leton and End effector Robots for Up-
tion with the German Association for 13. Ratajczak K, Szcze/sny G et al. Commi- per and Lower Limbs Rehabilitation:
Physiotherapy (ZVK) e. V., the Asso- nuted fractures of the proximal hume- Narrative Review. PM R. 2018; 10(9
ciation Physical Therapy, Association rus - principles of the diagnosis, treat- Suppl 2): S174-S188.
for Physical Professions (VPT) e. V. and ment and rehabilitation. Ortop Trau- 16. Riener R. and Munih M. Guest edito-
the Section Rehabilitation-Physical matol Rehabil. 2019 Apr 30;21(2):77- rial special section on rehabilitation via
Therapy of the German Society for Or- 93. doi: 10.5604/01.3001.0013.1544. bio-cooperative control. IEEE Trans.
thopaedics and Trauma e. V. (DGOU). PMID: 31180034 Neural Syst. Rehabil. Eg. 2010; 18:
Obere Extrem. 2018;13(1):45-61. doi: 14. Siciliano B., Khatib O. Springer Hand- 337-338.
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 71Puoi anche leggere