Robotica Educativa Progetto - nell'ambito del progetto "SOS Lavoro" - The Biorobotics Institute
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Progetto
2014
Robotica
Educativa
nell’ambito del progetto
“SOS Lavoro”
SOMMARIO
1. Introduzione............................................................................................................................................................................................3
2. Caratteristiche del progetto ..........................................................................................................................................................3
3. Le tre fasi del progetto .....................................................................................................................................................................4
4. I contenuti disciplinari ........................................................................................................................................................................4
4.1. Definizioni .................................................................................................................................................................................4
4.2. I componenti dei robot ......................................................................................................................................................5
5. Descrizione esecutiva delle tre fasi.............................................................................................................................................7
5.1. La PRIMA FASE – cosa è un robot? ...........................................................................................................................7
5.2. La SECONDA FASE – Progettare un Green-Robot ..............................................................................................8
5.2.1. Attività 1: Costruire il robot ...........................................................................................................................9
5.2.2. Attività 2: Programmare il robot .............................................................................................................10
5.2.3. Attività 3: I sensori del robot ......................................................................................................................11
5.3. La TERZA FASE – Preparazione dell’elaborato finale ......................................................................................13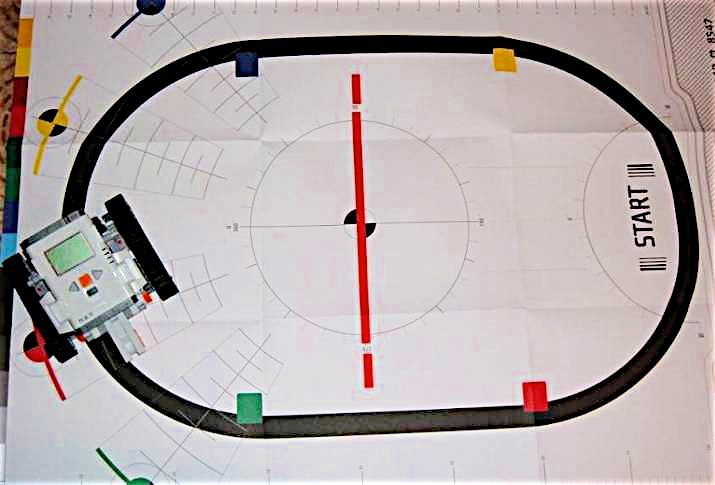
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
1. INTRODUZIONE
La
tecnologia
è
entrata
ormai
nella
vita
di
tutti
i
giorni
attraverso
i
dispositivi
robotici
a
casa,
a
lavoro,
nei
servizi
e
nel
tempo
libero.
Nonostante
le
nuove
generazioni
si
possano
de9inire
“native
digitali”,
in
quanto
cresciute
immerse
in
queste
tecnologie,
molti
giovani
sono
spesso
dei
semplici
utilizzatori
passivi
e
non
conoscono
a
fondo
ciò
che
sta
dietro
a
tali
innovazioni.
In
questo
contesto
è
ritenuta
opportuna
un’opera
di
divulgazione
della
cultura
tecnico-‐scienti9ica
che
possa
colmare
queste
lacune,
cominciando
dalla
scuola,
luogo
di
preparazione
culturale
e
sociale
delle
nuove
generazioni
per
poi
ottenere,
in
prospettiva
temporale,
una
diffusione
nella
società
in
generale.
La
robotica
è
uno
strumento
fortemente
interdisciplinare
ed
estremamente
coinvolgente
per
i
giovani,
che
riesce
a
suscitare
curiosità
e
ad
avvicinare
i
ragazzi
alla
scienza
e
alla
tecnologia
in
modo
spontaneo
ed
ef9icace.
Il
presente
progetto
si
propone
di
fornire
ai
giovani
degli
strumenti
per
comprendere
meglio
che
cosa
sia
un
robot,
come
funziona,
quali
sono
i
campi
di
utilizzo,
in
modo
da
poter
divenire
degli
utilizzatori
consapevoli
ed
essere
ipoteticamente
a
loro
volta
dei
futuri
innovatori
e
creatori
di
nuove
tecnologie.
Inoltre,
per
l’anno
scolastico
2013-‐2014
si
è
deciso
sull’orientare
l’introduzione
alla
robotica
su
una
tematica
attuale
ed
in
linea
con
le
direttive
nazionali
e
comunitarie:
la
salvaguardia
ambientale.
2. CARATTERISTICHE DEL PROGETTO
Il
progetto
propone
delle
attività
che
non
sono
argomenti
consueti
ai
programmi
ministeriali
per
cui
qui
di
seguito
si
illustreranno
le
caratteristiche
globali
del
progetto,
la
programmazione
temporale,
i
contenuti
disciplinari
ed
altre
informazioni
che
possono
essere
d’aiuto
ai
professori
al
9ine
di
comprendere
ed
partecipare
in
modo
più
ef9icace
e
soddisfacente
possibile.
Obiettivo
dell’attività:
- Capire
come
funziona
un
robot
e
imparare
ad
individuare
le
parti
che
lo
compongono.
- Conoscere
i
principi
di
funzionamento
dei
sensori.
- Acquisire
le
prime
basi
di
programmazione
di
robot.
- Conoscere
come
la
robotica
può
aiutare
l’uomo
nella
difesa
dell’ambiente.
- Realizzare
un
semplice
robot
che
aiuti
l’uomo
nella
salvaguardia
ambientale.
Classi
che
hanno
aderito:
Scuola Classi Studenti
1 L.
Scienti9ico Enriques 2
classi 40
2 L.
Scienti9ico Cecioni 2
classi 36
3 I.
Tecnico
Industriale
S. Galilei 2
classi 60
4 I.
Professionale Orlando 1
classe 25
5 I.T.
Nautico Cappellini 1
classe 25
6 I.T.
Geometri Buontalenti 1
classe 25
TOTALE 9
Classi 211
Studenti
Materie
di
applicazione:
Matematica,
Fisica,
Informatica
e
Elettronica.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .3
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
Ore
previste:
8
ore.
Conoscenze
pregresse:
nessuna
in
particolare.
Età
degli
studenti:
Scuole
secondarie
di
II
grado.
Organizzazione
del
modulo:
Lo
scopo
del
modulo
è
far
prendere
con9idenza
ai
ragazzi
con
il
mondo
della
robotica:
le
attività
sono
suddivise
in
più
esperienze
che
analizzano
vari
aspetti
dell’argomento.
3. LE TRE FASI DEL PROGETTO
Il
progetto
ha
una
durata
di
sette
mesi
all’interno
dell’anno
scolastico,
da
Ottobre
a
2013
a
Aprile
2014
e
si
divide
in
tre
fasi:
• PRIMA
FASE:
introduzione
alla
robotica
(ottobre2013
-‐
dicembre2013)
In
questa
prima
fase
viene
lanciato
il
progetto
a
livello
cittadino
con
un
evento
di
apertura
che
si
terrà
a
ottobre.
Dopo
tale
evento
inizierà
il
lavoro
nella
classi
che
prevede
l’introduzione
alla
robotica
e
la
scoperta
dei
vari
componenti
dei
robot.
In
tale
fase
è
prevista
almeno
un
intervento
da
parte
del
ricercatore
della
Scuola
Superiore
Sant’Anna.
• SECONDA
FASE:
progettare
un
green
robot
(gennaio
2014
-‐
marzo2014)
In
questa
fase
le
classi
che
hanno
aderito
al
progetto
andranno
ad
assemblare
il
kit
robotico
scelto
(Lego
Mindstorm)
seguendo
le
attività
consigliate
in
questo
modulo.
• TERZA
FASE:
preparazione
elaborato
Pinale
(aprile
2014)
La
terza
fase
prevede
la
preparazione
dell’evento
9inale
durante
il
quale
ogni
classe
potrà
esporre
il
proprio
lavoro.
Il
mese
di
aprile
è
dedicato
alla
preparazione
degli
elaborati
9inali
e
l’organizzazione
dell’evento
9inale.
PRIMA
FASE SECONDA
FASE TERZA
FASE
•evento
iniziale:
presentazione
progetto •
progettazione
green
robot •preparazione
•
introduzione
alla
robotica elaborati
•
evento
finale
ottobre novembre dicembre gennaio febbraio marzo aprile
2013 2014
diagramma temporale dell’esecuzione delle tre fasi in cui si articola il progetto
4. I CONTENUTI DISCIPLINARI
Oggigiorno
siamo
circondati
da
robot,
essi
sono
entrati
nelle
nostre
case
e
nelle
attività
giornaliere;
è
quindi
utile
conoscere
un
po’
più
nel
dettaglio
che
cosa
sono
davvero
i
robot.
4.1. Definizioni
Etimologia
del
termine
“robot”
Il
termine
“robot”
fu
usato
per
la
prima
volta
dallo
scrittore
ceco
Karel
Capek
nel
1920
nel
suo
romanzo
R.U.R.
(Rossum's
Universal
Robots).
Deriva
dal
termine
ceco
“robota”,
che
signi9ica
“lavoro
pesante”
o
“lavoro
forzato”.
In
realtà
il
vero
inventore
della
parola
“robot”
fu
il
fratello
di
Karl
Capek,
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .4
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
Josef,
anche
lui
scrittore
e
pittore
cubista,
il
quale
utilizzò
la
parola
“automat”
(automa)
in
un
suo
racconto
del
1917,
Opilec
(L'ubriacone).
Il
termine
greco
“autòmaton”
signi9ica
“che
si
muove
da
sé”.
Il
termine
robotica
fu
usato
per
la
prima
volta
(su
carta
stampata)
nel
racconto
di
Isaac
Asimov
intitolato
Circolo
vizioso
(Runaround,
1942),
presente
nella
sua
famosa
raccolta
Io,
Robot.
In
esso
egli
citava
le
tre
regole
della
robotica,
che
in
seguito
divennero
le
Tre
leggi
della
robotica:
• Prima
Legge:
Un
robot
non
può
recare
danno
a
un
essere
umano,
né
può
permettere
che,
a
causa
del
suo
mancato
intervento,
un
essere
umano
riceva
danno.
• Seconda
Legge:
Un
robot
deve
obbedire
agli
ordini
impartiti
dagli
esseri
umani,
purché
tali
ordini
non
contravvengano
alla
Prima
Legge.
• Terza
Legge:
Un
robot
deve
proteggere
la
propria
esistenza,
purché
questa
autodifesa
non
contrasti
con
la
Prima
e
la
Seconda
Legge.
DePinizioni
di
Robotica
•
Un
robot
è
un
manipolatore
multifunzionale
riprogrammabile
progettato
per
muovere
materiali,
componenti
o
dispositivi
specializzati,
attraverso
movimenti
variabili
programmati
per
lo
svolgimento
del
compito
(Robotics
Industry
Association
1980)
•
La
robotica
è
la
connessione
intelligente
della
percezione
all’azione
(Michael
Brady
1985)
•
Un
robot
è
una
macchina
in
grado
di
estrarre
informazioni
dall’ambiente
e
di
usare
la
conoscenza
sul
mondo
per
muoversi
in
maniera
sicura,
signi9icativa
e
intenzionale
(Maja
Mataric
1990)
•
Robotica
è
la
scienza
e
tecnologia
della
progettazione
di
sistemi
meccatronici
capaci
di
generare
e
controllare
movimento
e
forza
(Paolo
Dario
2000)
Una
dePinizione
più
generale
di
robot
Un
robot
è
una
macchina
che
raccoglie
informazioni
dall’ambiente
circostante
(“sente”)
e
le
utilizza
per
piani9icare
determinati
comportamenti
(“pensa”)
che
le
permettono
di
compiere
delle
azioni
nell’ambiente
in
cui
si
trova
(“agisce”).
(George
Bekey,
2005)
Parallelo
tra
uomo
e
robot
Partendo
dalla
de9inizione
precedente,
proviamo
a
individuare
un
possibile
parallelismo
tra
uomo
e
robot,
utile
per
sempli9icare
quei
concetti
che,
a
prima
vista,
possono
risultare
complessi.
Il
robot
“sente”,
cioè
raccoglie
informazioni
dall’ambiente
circostante
grazie
ai
sensori.
Essi
sono
dispositivi
in
grado
di
rilevare
e
misurare
una
grandezza
9isica
di
tipo
qualsiasi
(termico,
luminoso,
magnetico,
meccanico,
chimico,
ecc...).
Sempli9icando,
possiamo
farli
corrispondere
ai
nostri
sensi,
infatti
svolgono
all’incirca
la
stessa
funzione
dei
nostri
vista,
udito,
olfatto,
tatto
e
gusto.
Il
robot
“pensa”,
cioè
pianiUica
determinati
comportamenti
grazie
al
suo
sistema
di
controllo.
Si
tratta
di
un
processore
che
stabilisce
il
comportamento
del
robot
in
base
alle
informazioni
ricevute
dai
sensori.
Possiamo
pensarlo
un
po’
come
il
nostro
cervello,
che
riesce
a
prendere
delle
decisioni.
Il
robot
“agisce”,
cioè
compie
delle
azioni
nell’ambiente
in
cui
si
trova,
grazie
agli
attuatori
(o
motori).
Essi
sono
dispositivi
che
permettono
al
robot
di
compiere
azioni
e
movimenti.
Volendo
fare
un
parallelo,
essi
potrebbero
corrispondere
ai
nostri
muscoli
che
ci
permettono
di
interagire
con
il
modo
esterno.
In9ine
il
robot
ha
bisogno
di
una
fonte
di
energia
(batterie,
energia
elettrica
...),
allo
stesso
modo
in
cui
noi
abbiamo
bisogno
di
cibo.
4.2. I componenti dei robot
I
componenti
principali
di
un
robot
sono:
i
sensori,
il
sistema
di
controllo
e
gli
attuatori;
questi
elementi
sono
collegati
ad
un
meccanismo
(elementi
meccanici
e
ingranaggi
connessi
fra
loro).
Vediamo
in
breve
le
caratteristiche
principali.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .5
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
diagramma che illustra l’elaborazione del flusso di informazioni tra il robot e l’ambiente circostante.
I
sensori
sono
dei
dispositivi
sensibili
ad
una
determinata
grandezza
9isica
ed
in
grado
di
trasformarla
in
un
segnale
misurabile.
Esistono
molti
tipi
di
sensori,
che
possono
essere
classi9icati
in
base
alla
grandezza
misurata
(temperatura,
forza,
posizione,
suono,
intensità
della
luce,
concentrazione
di
un
gas...)
oppure
in
base
al
tipo
di
tecnologia
che
utilizzano
(sensori
a
ultrasuoni,
a
infrarossi
...).
Fondamentalmente,
però,
tutti
sono
in
grado
di
misurare
una
grandezza
9isica
e
restituire
in
uscita
un
segnale
elettrico
interpretabile
con
strumentazione
elettronica
e
PC.
Il
sensore,
quindi,
misura
una
grandezza
in
modo
molto
accurato
e
veloce
e
inoltre
comunica
direttamente
con
il
sistema
di
controllo
del
robot.
Senza
entrare
nel
dettaglio
delle
tecnologie
utilizzate
nei
singoli
sensori,
spesso
complesse
e
troppo
specialistiche
per
un
primo
approccio
alla
robotica,
possiamo
considerare
il
sensore
come
una
scatola
chiusa,
che
ha
come
entrata
una
variabile
da
misurare
e
come
uscita
un
segnale
elettrico.
Le
due
grandezze
sono
legate
da
una
“funzione
di
trasferimento”,
cioè
un’espressione
matematica
che
descrive
la
relazione
tra
la
grandezza
in
entrata
(da
misurare)
e
il
segnale
in
uscita
(il
risultato
fornito
dal
sensore).
diagramma del funzionamento di un sensore: la trasformazione di una grandezza fisica.
I
risultati
della
misura
possono
essere
semplicemente
visualizzati
su
un
display
(come
ad
esempio
nelle
bilance
o
nei
termometri
elettronici).
Se
invece
il
sensore
è
integrato
all’interno
di
un
robot,
il
segnale
in
uscita
viene
inviato
direttamente
al
microprocessore
che
lo
interpreta
e
usa
i
dati
raccolti
per
piani9icare
i
comportamenti
del
robot.
Il
sistema
di
controllo
è
l’insieme
delle
funzioni
di
comando
logico
che
permette
di
monitorare
e
controllare
la
struttura
meccanica
del
robot
e
di
comunicare
con
l’ambiente.
Il
controllo
di
un
robot
si
occupa
di
coordinare
i
segnali
elettronici
rilevati
dal
sistema
di
percezione
(sensori)
per
produrre
segnali
di
movimento
da
trasdurre
in
opportuni
comandi
elettrici
per
i
motori
(attuatori).
Programmare
un
robot
signi9ica
fornire
un
insieme
di
istruzioni
che
de9iniscono
un
particolare
compito
da
eseguire.
Gli
attuatori
sono
dei
sistemi
che
permettono
al
robot
di
agire
sull’ambiente
esterno,
sono
cioè
organi
in
grado
di
convertire
energia
in
azione
meccanica.
I
motori,
ad
esempio,
trasformano
l’energia
elettrica
o
idraulica
con
cui
sono
alimentati
in
un’energia
meccanica
che
permette
il
movimento
del
robot.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .6
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
5. DESCRIZIONE ESECUTIVA DELLE TRE FASI
Il
presente
progetto
di
Robotica
Educativa
si
articola
in
tre
fasi.
La
prima
ha
lo
scopo
di
introdurre
il
mondo
della
robotica
agli
studenti,
portando
come
esempio
robot
che
sono
spesso
presenti
nell’ambiente
quotidiano
9ino
ad
arrivare
a
dei
robot
estremamente
speci9ici
per
compiti
particolari.
La
seconda
fase
è
dedicata
alla
costruzione
del
robot
ecologico
(Green
Robot)
da
parte
degli
stessi
studenti.
Il
loro
compito
sarà
quello
di
individuare
il
compito
da
far
svolgere
al
proprio
robot
per
poi
costruirlo
e
programmarlo.
La
terza
fase
riguarderà
la
preparazione
dei
robot
in
visione
dell’evento
9inale
del
progetto.
Gli
studenti
prepareranno
un
elaborato
riguardante
l’attività
svolta
durante
il
progetto
e
porteranno
i
loro
robot
all’evento
9inale
e
conclusivo.
Nei
prossimi
paragra9i
si
analizzerà
in
dettaglio
l’aspetto
operativo
delle
tre
fasi.
Si
chiariscono
in
questo
modo
gli
aspetti
esecutivi
e
pratici
che
possono
essere
utilizzati
come
percorso
di
riferimento
per
le
attività
frontali
con
i
ragazzi
delle
classi
interessate.
5.1. La PRIMA FASE – cosa è un robot?
Al
9ine
di
attirare
l’attenzione
degli
studenti,
si
può
iniziare
chiedendo
loro
quali
robot
conoscono
e/o
hanno
utilizzato
direttamente
oppure
visto
in
TV
o
sui
giornali.
A
questo
scopo
saranno
mostrate
immagini
e
9ilmati
di
robot,
cercando
di
coglierne
le
caratteristiche.
Un’attenzione
particolare
sarà
data
ai
robot
in
grado
di
aiutare
l’uomo
nella
tutela
dell’ambiente
attraverso
il
monitoraggio
delle
sostanze
inquinanti,
la
raccolta
dei
ri9iuti,
i
lavori
in
situazioni
a
rischio.
Gli
studenti
saranno
incoraggiati
a
formulare
ipotesi
su
come
funzionano,
che
cosa
analizzano
e
sui
vantaggi
derivanti
dal
loro
utilizzo.
Rientra
in
questa
fase
anche
un’eventuale
visita
ai
laboratori
di
ricerca.
Questa
esperienza
è
molto
importante
perché
i
ragazzi,
vedendo
“dal
vivo”
i
robot
e
parlando
con
i
ricercatori
che
li
hanno
progettati,
saranno
stimolati
a
costruire
il
proprio
robot,
esattamente
come
fa
un
vero
ricercatore.
Come
attività
iniziale,
si
propone
una
semplice
esperienza
che
ha
lo
scopo
di
“far
toccare
con
mano”
ai
ragazzi
che
cos’è
un
robot.
Si
riassumono
nella
seguente
tabella
le
caratteristiche
di
questa
prima
fase:
PRIMA FASE Cosa è un Robot?
Tipo
di
attività: osservazione,
da
svolgere
in
classe.
Materiali
necessari: Kit
Robotici
Durata
dell’attività: 2
ore
Conoscenze
preliminari
richieste: nessuna
in
particolare
Grado
di
difficoltà: semplice
Costo: nessuno
-‐
i
kit
saranno
forniti
dai
ricercatori
Fattibilità: se
la
scuola
possiede
i
kit,
l’esperienza
è
realizzabile
dall’insegnante
Procedura
per
l’esperimento:
Saranno
portati
in
classe
dei
robot
didattici
con
caratteristiche
diverse,
alcuni
dei
quali
equipaggiati
con
sensori
(luce,
suono,
contatto).
1. Utilizzare
un
tavolo
abbastanza
grande
oppure
il
pavimento,
preferendo
super9ici
senza
eccessivi
dislivelli.
2. Posizionare
i
robot
sul
tavolo,
accenderli
ed
osservarne
il
funzionamento.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .7
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
3. Focalizzare
l’attenzione
sul
fatto
che,
nonostante
la
forma
e
l’apparenza
siano
diverse,
i
robot
hanno
molte
caratteristiche
comuni
(si
muovono,
reagiscono
agli
stimoli).
4. Individuare
a
quali
stimoli
risponde
ogni
robot
(ad
es.
contatto,
suono...)
5. Osservare
nel
dettaglio
i
robot
e
individuare
da
quali
parti
sono
composti,
dove
sono
posizionati
i
motori,
i
sensori
ed
il
sistema
di
controllo.
6. Se
possibile,
provare
a
smontare
uno
dei
robot
per
capire
come
sono
collegate
tra
loro
le
varie
parti.
Alcuni esempi di kit robotici da osservare in classe
Guida
per
l’insegnante:
Favorire
l’osservazione
autonoma,
stimolando
i
ragazzi
a
porsi
le
seguenti
domande:
- Quali
sono
le
capacità
del
robot?
- A
quali
stimoli
reagisce?
Come
si
comporta
quando
riceve
uno
stimolo?
Stimolare
a
proporre
idee:
- Di
quanti
motori
pensi
abbia
bisogno
per
i
suoi
movimenti?
Perché?
- Di
quali
tipi
di
sensore
potrebbe
essere
dotato?
Perché?
Passare
in9ine
ad
un’osservazione
più
dettagliata,
eventualmente
smontando
il
robot:
- Da
quali
e
quante
parti
è
composto
il
robot?
- Come
sono
collegati
tra
loro
i
vari
componenti?
- Che
cosa
succede
se
interrompiamo
i
collegamenti?
Perché?
L’esperienza
si
pone
l’obiettivo
di
far
emergere
che:
i
robot
sono
composti
da
sensori,
sistema
di
controllo
(microprocessore),
attuatori,
struttura
meccanica
e
fonte
di
energia.
I
sensori
raccolgono
gli
stimoli
esterni
e
li
inviano
al
microprocessore;
il
microprocessore
ricevere
i
dati
ed
elabora
comandi
da
inviare
agli
attuatori;
gli
attuatori
generano
il
movimento
della
struttura
meccanica
seguendo
le
istruzioni
ricevute;
la
struttura
meccanica
è
un
insieme
articolato
di
elementi
meccanici
connessi
fra
loro
(meccanismi
e
ingranaggi);
la
fonte
di
energia
(batterie
o
corrente
elettrica)
fornisce
al
robot
l’energia
necessaria.
I
componenti
sono
collegati
tra
loro
e
se
le
connessioni
vengono
interrotte
la
funzionalità
del
robot
sarà
compromessa
in
parte
o
totalmente.
5.2. La SECONDA FASE – Progettare un Green-Robot
Agli
studenti
sarà
dato
l’obiettivo
di
creare
un
robot
con
compiti
di
salvaguardia
ambientale.
È
possibile
lavorare
con
l’intera
classe
oppure
in
gruppi
per
ideare
robot
diversi
tra
loro.
A
titolo
di
esempio,
potrebbe
essere
progettata
una
città
in
cui
un
robot
spazza
la
strada,
uno
porta
i
ri9iuti
al
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .8
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
centro
di
raccolta,
uno
li
seleziona,
ecc.
La
forma
e
l’aspetto
estetico
dei
robot
possono
essere
modi9icati
a
piacere,
dando
spazio
a
fantasia
e
creatività.
Per
la
realizzazione
del
robot
si
è
deciso
di
adottare
il
kit
Lego
Mindstorms
NXT
in
quanto
è
riconosciuta
come
piattaforma
educativa
robotica
robusta,
facile
da
usare
e
programmare,
modi9icabile
e
con9igurabile
in
modo
molto
semplice.
Il
kit
comprende
sensori,
motori,
strutture
componibili
ed
un
sistema
di
controllo,
chiamato
Mattoncino
Intelligente
NXT.
L’iter
di
lavoro
per
ottenere
un
robot
che
funzioni
correttamente
è
riassumibile
nei
seguenti
passi:
1. decidere
il
compito
del
robot
e,
in
base
a
quello,
progettarne
la
forma;
2. assemblare
il
robot
(motori,
sensori,
scheda
di
controllo,
ecc.);
3. programmare
il
robot;
4. testarlo
e
modi9icarlo
9ino
ad
ottenere
il
comportamento
desiderato.
esempi di forme di robot costruibili con il kit Lego Mindtorms
La
SECONDA
FASE
-‐
progettare
un
Green
Robot
-‐
si
articola
in
tre
attività
operative:
Attività 1
–
Costruire
il
robot
Attività 2 –
Programmare
il
robot
Attività 3
–
I
sensori
del
robot
5.2.1. Attività 1: Costruire il robot
Questa
attività
è
focalizzata
sulla
costruzione
della
struttura
del
robot.
Saranno
portati
in
classe
i
kit
robotici
che
gli
studenti
dovranno
assemblare.
SECONDA FASE ATTIVITÀ 1 - Costruire il Robot
Tipo
di
attività: esperimento,
da
svolgere
in
classe
Materiali
necessari: •
kit
robotici
Lego
Mindstorms,
•
batterie
(6
stilo
AA
per
il
kit
Mindstorms)
Durata
dell’attività: 2
ore
Conoscenze
preliminari
richieste: conoscenza
dei
principali
componenti
di
un
robot
Grado
di
difficoltà: necessaria
buona
manualità
e
precisione
per
il
montaggio
dei
kit
Costo: costo
dei
kit
(che
sono
già
in
possesso
della
scuola
oppure
forniti
dai
ricercatori
del
Sant’Anna)
Fattibilità: eseguibile
dagli
studenti.
È
comunque
consigliata
la
supervisione
di
un
adulto
perché
alcune
operazioni
manuali
possono
risultare
complesse
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .9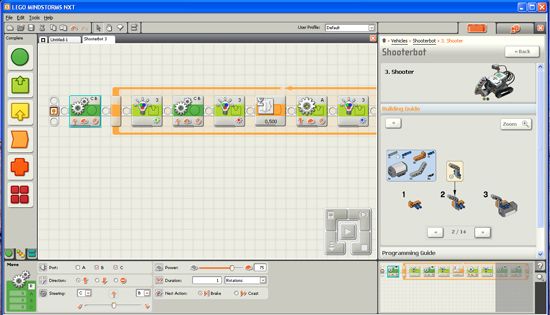
Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
Procedura
per
l’esperimento:
1. Utilizzare
un
piano
libero
da
oggetti,
ad
esempio
il
banco.
2. Aprire
la
scatola
con
il
kit
e
riconoscere
i
vari
componenti,
con
l’aiuto
del
manuale
selezionare
le
parti
da
assemblare.
3. Assemblare
la
struttura,
le
schede
elettroniche
ed
i
motori
utilizzando
il
cacciavite,
le
viti
e/
o
i
connettori
forniti
nel
kit.
È
possibile
fare
riferimento
a
uno
degli
esempi
presenti
nel
manuale.
I kit Mindstorms: la scatola con i componenti
4. Inserire
le
batterie.
5. Se
i
collegamenti
sono
corretti,
premendo
l’interruttore
di
avvio
si
accenderà
il
display.
Due esempi di robot costruiti con il kit Mindstorms.
5.2.2. Attività 2: Programmare il robot
In
questa
seconda
attività
della
Fase
2
i
ragazzi
programmeranno
il
robot
per
stabilirne
il
comportamento
e
le
reazioni
agli
stimoli
esterni.
Il
robot
sarà
dotato
di
sensori
di
contatto.
SECONDA FASE ATTIVITÀ 1 - Costruire il Robot
Tipo
di
attività: esperimento,
da
svolgere
in
classe
o
nel
laboratorio
di
informatica
Materiali
necessari: •
kit
Robotici
Lego
Mindstorms
(con
Batterie)
•
software,
fornito
insieme
al
kit
•
personal
Computer
Durata
dell’attività: circa
2
÷
4
ore
Conoscenze
preliminari
richieste: è
di
aiuto
la
capacità
di
saper
sviluppare
schemi
a
blocchi
e
diagrammi
di
flusso;
è
necessaria
una
conoscenza
base
dell’uso
del
computer
Grado
di
difficoltà: medio
-‐
complesso
Costo: il
software
è
compreso
nel
kit,
il
PC
è
generalmente
già
in
dotazione
alla
scuola
Fattibilità: eseguibile
dagli
studenti
con
la
supervisione
dell’insegnante
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .10Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
Procedura
per
l’esperimento:
1. Installare
il
software
sul
PC
della
scuola:
l’ambiente
di
sviluppo
è
costituito
da
un’interfaccia
visuale
semplice
ed
intuitiva
che
permette
di
programmare
il
robot
attraverso
dei
diagrammi
di
9lusso.
2. Aprire
un
nuovo
documento.
3. Con9igurare
la
pagina
di
hardware,
seguendo
le
istruzioni
fornite
nel
manuale.
4. Nella
pagina
di
programmazione,
comporre
il
diagramma
di
9lusso
trascinando
nella
9inestra
di
lavoro
i
blocchi
di
comando
che
si
trovano
nella
colonna
sinistra
dell’interfaccia
e
collegandoli
nell’ordine
corretto.
Ogni
blocco
rappresenta
un
comando
per
il
robot,
sul
manuale
è
possibile
trovare
le
caratteristiche
di
ogni
singolo
blocco.
5. Collegare
il
robot
al
PC
tramite
l’apposito
cavo
USB
e
trasferire
il
programma
sul
robot.
6. Disconnettere
il
cavo
e
premere
il
tasto
di
avvio
sul
mattoncino
Lego.
7. Se
il
robot
è
stato
programmato
correttamente,
si
comporterà
come
previsto;
altrimenti
sarà
necessario
modi9icare
il
programma
per
trovare
l’errore.
8. Una
volta
ottenuti
dei
risultati
è
possibile
modi9icare
nuovamente
il
programma
per
dare
al
robot
compiti
sempre
più
complessi.
Microprocessore del kit Mindstorms collegato al PC (sinistra) e l’interfaccia grafica del software per la
programmazione del robot (destra).
Guida
per
l’insegnante:
Prima
di
costruire
lo
schema
a
blocchi
è
necessario
avere
ben
chiaro:
• quali
informazioni
è
necessario
ottenere
dai
sensori
• quali
comandi
è
necessario
inviare
ai
motori
Durante
la
fase
di
programmazione
è
molto
utile
porsi
un
obiettivo
iniziale
(ad
es.
“il
robot
dovrà
fermarsi
quando
incontra
un
ostacolo”,
oppure
“dovrà
girare
a
destra”
ecc.).
Di
seguito
alcuni
esempi
di
compiti
da
dare
al
robot:
- procedere
sempre
dritto
- muoversi
velocemente
oppure
lentamente
- ruotare
a
sinistra
- tornare
indietro
dopo
aver
urtato
un
ostacolo
- ecc.
5.2.3. Attività 3: I sensori del robot
In
aggiunta
alle
attività
descritte,
si
possono
fare
esperimenti
utilizzando
i
sensori
presenti
nel
kit:
contatto,
ultrasuoni
e
colore.
La
seguente
tabella
sintetizza
le
caratteristiche
della
terza
attività:
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .11Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
SECONDA FASE ATTIVITÀ 3 - I sensori del Robot
Tipo
di
attività: esperimento,
da
svolgere
in
classe
Materiali
necessari: •
kit
Robotici
Lego
Mindstorms
(con
Batterie)
Durata
dell’attività: circa
2
ore
Conoscenze
preliminari
richieste: aver
svolto
le
attività
precedenti
Grado
di
difficoltà: medio
-‐
complesso
Costo: costo
dei
kit
(che
sono
già
in
possesso
della
scuola
oppure
forniti
dai
ricercatori
del
Sant’Anna)
Fattibilità: eseguibile
dagli
studenti.
Procedura
per
l’esperimento:
A
seconda
del
compito
da
svolgere,
è
necessario
utilizzare
uno
o
più
sensori
per
raccogliere
informazioni
sull’ambiente
circostante.
Alcuni
esempi
possono
essere
ad
esempio
“segui
un
percorso
evitando
gli
ostacoli”,
“segui
una
luce”,
“torna
indietro
quando
tocchi
qualcosa”.
1. Collegare
ogni
sensore
alle
porte
d’ingresso
del
mattoncino
di
controllo
tramite
gli
appositi
cavi
(contatto
porta
1
e
2,
colore
3,
ultrasuoni
4).
2. Sfruttare
le
caratteristiche
di
ogni
sensore
per
programmare
il
comportamento
del
robot
attraverso
il
software.
Selezionando
un
blocco
sulla
pagina
di
programmazione,
in
basso
appare
una
breve
descrizione
delle
sue
proprietà.
• Il
sensore
di
contatto:
è
il
sensore
più
semplice,
fornisce
al
robot
il
senso
del
tatto,
rileva
quando
è
premuto
e
quando
viene
rilasciato.
Il
modo
più
semplice
di
utilizzarlo
è
associare
un’azione
da
compiere
quando
il
tasto
viene
premuto
(ad
esempio
cambiare
direzione
quando
si
incontra
un
ostacolo).
• Il
sensore
di
distanza:
il
sensore
a
ultrasuoni
permette
al
robot
di
rilevare
la
presenza
di
oggetti
e
di
misurarne
la
distanza.
Il
principio
9isico
su
cui
si
basa
è
lo
stesso
dei
pipistrelli:
misura
la
distanza
calcolando
il
tempo
impiegato
da
un’onda
a
ultrasuoni
per
urtare
un
oggetto
e
tornare
indietro.
Il
sensore
può
essere
usato
per
far
muovere
il
robot
evitando
gli
ostacoli
prima
di
toccarli,
oppure
si
può
progettare
un
robot
che
segnali
con
un
allarme
eventuali
movimenti
nella
stanza.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .12Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
• Il
sensore
di
colore:
questo
sensore
permette
al
robot
di
distinguere
tra
luce
e
buio
e
di
rilevare
6
diversi
colori,
funziona
inoltre
come
fonte
luminosa.
Il
sensore
può
essere
utile
per
far
seguire
al
robot
una
pista
nera
su
sfondo
bianco,
e
magari
cambiare
direzione
quando
incontra
una
zona
rossa,
oppure
può
essere
utilizzato
come
sensore
di
luce
per
misurare
l’intensità
della
luminosità
nella
stanza.
I
sensori
possono
essere
utilizzati
anche
per
acquisire
dati
dall’esterno.
Attraverso
l’apposita
interfaccia,
il
kit
può
essere
impiegato
per
condurre
esperimenti,
registrare
dati
e
disegnare
gra9ici
sull’andamento
dell’intensità
di
luce
o
della
distanza.
In
questo
modo
il
robot
diventa
uno
strumento
di
misura
per
esperimenti
di
qualsiasi
genere
(di
scienze,
matematica,
9isica...).
Robot che segue una pista grazie al sensore di luce.
5.3. La TERZA FASE – Preparazione dell’elaborato finale
Questa
ultima
fase
del
progetto
è
dedicata
a
preparare
poster,
presentazioni
multimediali,
disegni,
foto
e
video.
Inoltre
è
consigliabile
scrivere
articoli
da
pubblicare
sul
sito
web
del
progetto,
sul
giornalino
scolastico
e/o
su
organi
pubblici.
La
parte
più
stimolante
per
gli
studenti
sarà
la
presentazione
del
proprio
lavoro
ai
docenti
e
ai
ricercatori
provenienti
dalle
altre
scuole.
Questa
fase
fungerà
quindi
anche
da
veri=ica
di
tutte
le
attività
svolte
nei
mesi
precedenti,
mettendo
in
mostra
quanto
i
ragazzi
abbiano
imparato
ed
abbiano
assimilato.
Sarà
organizzata
una
giornata
conclusiva
durante
la
quale
ogni
gruppo
potrà
introdurre
il
proprio
robot
e
le
sue
caratteristiche.
Potranno
essere
programmate
delle
gare
tra
prototipi
dello
stesso
tipo
e
saranno
previsti
dei
premi
per
i
migliori
elaborati.
Scuola Superiore Sant’Anna - Istituto di BioRobotica p .13Robotica Educativa - nell’ambito del progetto “SOS Lavoro”
Stampa: Centro Stampa del Comune di Livorno, novembre 2013
p .14Puoi anche leggere