Il sistema di controllo di assetto di un satellite - Trieste, 24 novembre 2020 - Moodle@Units
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

Il sistema di controllo di
assetto di un satellite
Trieste, 24 novembre 2020 1
SOTTO-SISTEMI Trieste, 24 novembre 2020 2
DETERMINAZIONE E CONTROLLO ASSETTO 1/5
A satellite must maintain a certain attitude while in orbit
- to allow precise pointing of an antenna toward the Earth,
- to allow the accurate orientation of observation
instruments toward the object being observed,
- and to direct solar panels toward the Sun.
But the satellite receives interference from such
phenomena as the Earth's gravitational and magnetic
fields, and the solar wind.
These phenomena tend to disturb the satellite's attitude,
so it is necessary to control attitude to keep the satellite
stable.
http://spaceinfo.jaxa.jp/
Trieste, 24 novembre 2020 3
DETERMINAZIONE E CONTROLLO ASSETTO 2/5
Ø The spacecraft needs an Attitude Determination
and Control System (ADCS)
Ø To do the determination function requires
knowledge of kinematics
Ø Attitude is determined using sensors
Ø To do the control function requires knowledge of
kinetics and kinematics (dynamics)
Ø Attitude is controlled using actuators
Trieste, 24 novembre 2020 4
DETERMINAZIONE E CONTROLLO ASSETTO 3/5
y-axis
Modi operativi:
M = 215 kg
Negative orbit x-axis
normal Ix = Iy = 90 kg m2
Velocity
Ø Inserzione in orbita Iy = 60 kg m2
Orbite attitude = 800 km,
Ø Acquisizione iniziale circular
Normale
Slew rate < 0.1° / s
Ø Pointing accuracy = 0.1°
Ø Slew z-axis Mission is earth looking,
except one operational
To Earth
Ø Contingency manoeuver per month to a
target of opportunity
Ø Speciale
Trieste, 24 novembre 2020 5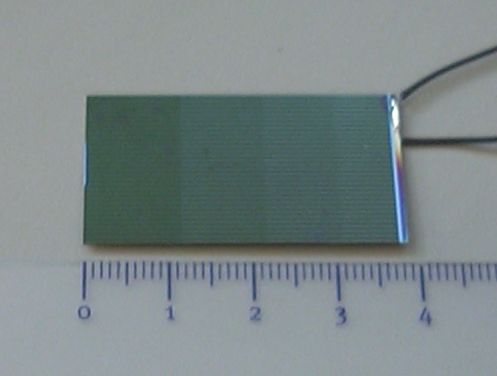
DETERMINAZIONE E CONTROLLO ASSETTO 4/5
Parametri e requisiti
determinazione
Ø Accuracy
& controllo
Ø quanto bene misuro/controllo orientazione S/C (0.25° su 3
assi)
Ø Range
Ø intervallo angolare entro cui devo garantire accuracy (30°
dal nadir)
Ø Jitter
Ø velocità angolare a breve termine, moto alta frequenza (1°/s)
controllo
Ø Drift
Ø velocità angolare a lungo termine, moto bassa frequenza
(1°/hr)
Ø Settling time
Ø tempo limite per riprendere il controllo dopo una manovra
Trieste, 24 novembre 2020 6
DETERMINAZIONE E CONTROLLO ASSETTO 5/5
CONTROLLO:
terr
a sat SISTEMI ATTIVI
sole
SISTEMI PASSIVI
DETERMINAZIONE:
SENSORI
GPS
CELLE SOLARI,
FOTODIODI
MAGNETOMETRO
Trieste, 24 novembre 2020 7
Tecniche di Controllo 2/3
CONTROLLO PASSIVO
Ø Gravity gradient control
Ø Controllo tramite magneti permanenti
Ø Tecniche di controllo dello spin
CONTROLLO ATTIVO
Ø Controllo tramite bobine magnetiche
Ø Sistemi a zero momentum
Ø Sistemi a momentum bias
Ø Thrusters
Trieste, 24 novembre 2020 8
Control Algorithms
Ø Control Algorithms are computer programs
that receive input data from vehicle
sensors and derive the appropriate torque
commands to the actuators to rotate the
vehicle to the desired attitude
Trieste, 24 novembre 2020 9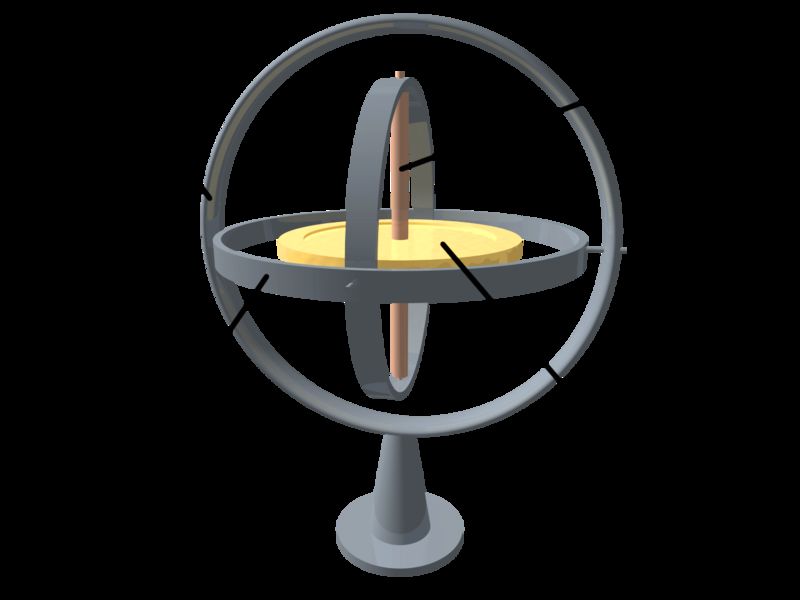
Tecniche di Controllo 3/3
Equazione di Eulero
Ø dL / dt = T = ΣMi (Mi = ri×Fi)
Ø L = I⋅ω T = I⋅dω/dt (...+ω×I⋅ω…)
CONTROLLO PASSIVO
Ø f(Ix,Iy,Iz, ωx, ωy,ωz) = Mdx (…Mdy, Mdz)
Ø Ix ωx +[(Iz-Iy) ωy ωz ]= Mdx Matrice nel sistema di
Ø Iy ωy +[(Ix-Iz) ωz ωx ]= Mdy riferimento fisso col corpo
Sistema di riferimento
Ø Iz ωz +[(Iy-Ix) ωx ωy ]= Mdz principale
CONTROLLO ATTIVO
Ø Ix ωx + (Iz-Iy) ωy ωz = Mdx + Mcx
Ø Iy ωy + (Ix-Iz) ωz ωx = Mdy + Mcy
Ø Iz ωz + (Iy-Ix) ωx ωy = Mdz + Mcz
Trieste, 24 novembre 2020 10Diagramma a Blocchi
(
)
Trieste, 24 novembre 2020 11Disturbi Ambientali
39800
km
6310
km
1000
km
158
km
Trieste, 24 novembre 2020 12BOOM: Gradiente di Gravità
a1
DIMENSIONAMENTO
DEL BOOM
✦ CdM:
o F0 = mµ / R2 = mω2oR
m1
✦ m1 : (ω2o = µ/R3)
Centro di g1 o Fg,1 = m1µ / R12 < m1ω2oR1
m
massa
✦ m2 :
o Fg,2 = m2µ / R22 > m2ω2oR2
a2
m2 3µ
x TG = 3 I Z − I MIN sen(2θ )
y g2
2a
z
Trieste, 24 novembre 2020 13Stabilizzazione a Spin 1/2
RIGIDITA’ GIROSCOPICA
L=Iω
ω velocità angolare, I momento ω
d’inerzia,
⇒ L momento angolare (>>)
Perturbazione ⇒ Forza ⇒ T (torsione),
⇒ direzione di L varia di dψ
(precessione) ~
⇒ piccola torsione T:
⇒ dψ/dt piccolo
⇒ per una data torsione T:
⇒ (L >>) dψ/dtStabilizzazione a Spin 2/2
Valori tipici: 1 rivoluzione
al secondo
Svantaggi:
- pannelli solari ridotti
- orientamento antenne
e strumenti richiedono
ulteriori manovre (de-
spinning)
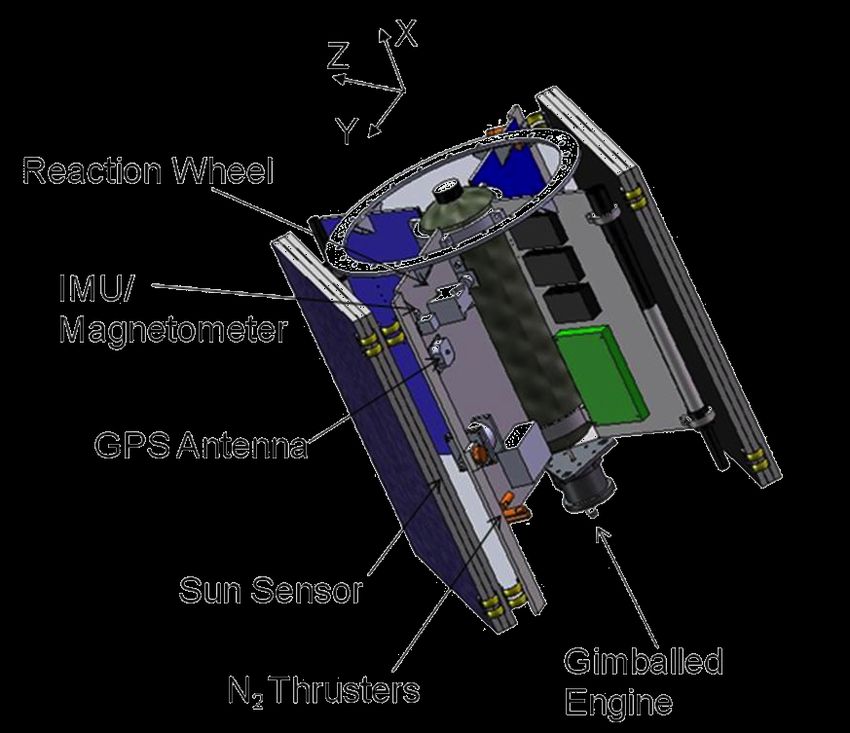
Trieste, 24 novembre 2020 15I diversi tipi di attuatori Ø Propulsori e gas jet Ø Ruote di reazione e di momento Ø Control moment gyro Ø Magnetic torquer Trieste, 24 novembre 2020 16
Ruote 1/4
Momentum o Reaction Wheel
Dischi (rotori) che ruotano grazie a un motore elettrico
Quando il motore applica un momento di torsione per
accelerare o rallentare il rotore, produce un momento
di torsione di reazione sul corpo del satellite
Essendo un sistema chiuso, il momento angolare totale
e’ costante ⇒ qls variazione del momento angolare
di una ruota comporta una variazione uguale e
opposta del momento angolare del corpo del satellite
Trieste, 24 novembre 2020 17Ruote 1/4
Momentum o Reaction Wheel
Dischi (rotori) che ruotano grazie a un motore elettrico
Quando il motore applica un momento di torsione per
accelerare o rallentare il rotore, produce un momento
di torsione di reazione sul corpo del satellite
Essendo un sistema chiuso, il momento angolare totale
e’ costante ⇒ qls variazione del momento angolare
di una ruota comporta una variazione uguale e
opposta del momento angolare del corpo del satellite
Trieste, 24 novembre 2020 18Ruote 2/4
• Asse di gimbal: fisso nel sistema rif.
corpo
• Asse di spin controllato dal motore di
gimbal
• Velocita’ di spin controllata dal
motore della ruota
• Angoli di gimbal fissi:
“momentum wheel” (MW)
“reaction wheel” (RW)
• Velocita’ di ruota fissa:
“control moment gyro” (CMG)
L’asse di rotazione fissato per ogni
ruota ⇒ una ruota puo’ agire solo
su un asse ⇒ almeno tre ruote per
controllare il satellite su tre assi
Trieste, 24 novembre 2020 19Ruote 3/4
Se le ruote sono usate ripetutamente per contrastare una
torsione sempre nello stesso senso, le ruote possono
superare la loro velocità massima ⇒ devono essere
“dumpate” (thrusters or magnetic torquers)
Ø Ruote di reazione: velocità nominale zero
Ø Il motore elettrico fa ruotare la RW per torcere la S/C
Ø Risposta veloce
Ø Saturazione puo’ essere un problema
Ø Usate quando la torsione e’ richiesta periodicamente
Ø Ruote di momento: velocità nominale alta (~6000
rpm) per fornire rigidità giroscopica
Ø Range permesso: +/- 10% della velocita’ media
Trieste, 24 novembre 2020 20Ruote 4/4 Trieste, 24 novembre 2020 21
Giroscopi ✦ Forniscono alti livelli di controllo (100x ruote convenzionali) ✦ Il sistema di controllo molto più complesso delle ruote convenzionali ✦ Pesanti, alti consumi, rumorosi, vibrazioni Trieste, 24 novembre 2020 22
Magnetic Torquer 1/2
Il campo magnetico della S/C (momento di
dipolo m) interagisce con quello della Terra
(B) producendo un momento di torsione T:
T=mxB
Torque rods: bobine scelte e posizionate
opportunamente, percorse da correnti
variabili per controllare l’assetto
T = nIA (c x B)
n=no. di spire, I = corrente, A = sezione
trasversale della bobina, c = versore
dell’asse della bobina
Trieste, 24 novembre 2020 23Magnetic Torquer 2/2
✦ Magnetic torquers sono efficaci
anche fino alle GEO, ma il CM
della Terra decresce
velocemente con l’altezza
✦ Questi sistemi non richiedono
carburante e sono controllabili
(ma sistema di controllo
complesso) e devono essere
posizionati accuratamente
✦ Sono utilizzati anche per
“momentum dumping”…
Trieste, 24 novembre 2020 24Momenti Sommario p. 366 SMAD (tab. 11-9A) Trieste, 24 novembre 2020 25
Tecniche di Controllo 1/3 Trieste, 24 novembre 2020 26
I diversi tipi di sensori 1/2
Ø Sensori solari
Ø Analogici
Ø Di presenza
Ø Digitali
Ø Sensori stellari (star tracker)
sole/terra ~ 400
Ø Sensori di orizzonte
sole/terra ~ 30000
Ø Terra (IR / V)
Ø Luna (IR / V)
Ø Magnetometri
Ø Ricevitori GPS
Ø Giroscopi
Trieste, 24 novembre 2020 27I diversi tipi di sensori 2/2
Sensori stellari Sensori solari
Trieste, 24 novembre 2020 28Star Trackers
200
1.6
180
Trk error
160
tracking error (arcsec)
motor position (deg)
1.2 140
120
AZ pos
100
0.8
80
EL pos 60
0.4
40
20
0 0
0 2000 4000 6000 8000 10000 12000 14000 16000 18000
Trieste, 24 novembre 2020 29
time (s)FS a] W Solari
Sensori F]ZO W Analogici
6 OZ]UWQW
FS FS
a] Wa]
F]ZO W 6 W OZ]UWQW
W F]ZO 6 OZ]UWQW
Celle solari:
8SZZS a]ZO W2I(β)
> β =4Io>]cos
Q]a ββ$
8SZZS a]ZOa]ZO
W2 > βW2 >4β>] 4Q]a
β$
8SZZS >] Q]a
β$ β$ β$ β$
T]d
T]d T]d α 4 --] o
-α fov/2-α α$ α =] 55]$
4 --
α T]d4).(
α-fov/2 α
α 4
fov=160 -- ]
o
α$ T]d4).( ]$
-180 -90 -α 0 fov/2-α 90 180
α$ T]d4).(]$
α-fov/2 α
-180 -90 α 0 90 180
- fov/2-α
α-fov/2 -α α fov/2-α
-180 -90 0 α-fov/2 90 α 180
-180 -90 0 90 180
β$
β$ β$
G WSabS
Trieste, 24 )1 ]dS[P S 2020
novembre ()+ +( 30FSSensori
a] a]
FS W F]ZO W RW
Solari
W F]ZO C
diW RW SaS
SaShOhO
Presenza
C
FS a] W F]ZO W RW CaWSaS γ 4hO)
naWsin
aWγ 4γ )4= )1
γ$ γ$
γ$ γ$ γ$ γ$ aW γ 4 )
γ$ γ$
] OfWa
]on]OfWa
axis
OfWa
] OfWa
]TT OfWa
off
]TT axis
]TT OfWa
OfWa
]TT OfWa
aObc
saturation
aObc Ob]Ob]
aObc Ob]
aObc Ob]
G Trieste,
WSabS )1G24
G WSabS )1
]dS[P
WSabS )1 S
novembre
]dS[P
()+
]dS[P
S ()+
S ()+
2020 +)
+)31FSSensori Solari
a] W F]ZO Digitali
W 9WUWbOZW
Componente
8][ ] S bS RW
[Wac
di O
misura
Componente
8][ ] S bS RW
diQ][O R]
comando
8]RWQS < Og
Codice Gray
codice binario a lunghezza fissa s
costituito da tutte le 2s sequenze di
s bit e consente di rappresentare
tutti gli interi da 0 a 2s−1
G WSabS )1
Trieste, 24 ]dS[P S ()+2020
novembre + 32Tecniche di controllo Trieste, 24 novembre 2020 33
Tecniche di controllo Trieste, 24 novembre 2020 34
ESEMPIO: BOOM+BOBINA
BOBINA Con questa scelta
Compromesso tra massa AtmoCube sarà in
minima e momento grado di soddisfare i
magnetico massimo requisiti di missione:
BOOM una faccia rivolta verso il nadir
per mantenere l’antenna
Compromesso tra massimo gradiente di
rivolta verso Terra
gravità e minimo
Altezza (km) spostamento
TAERODINAMICA (Nm) centro
TGGRAVITA’ di
(Nm) TBOBINA (Nm)
massa una faccia rivolta nella direzione
min sol 1.347 × 10-9
del moto per il calcolo della
3.879 × 10-6
50°C
650 1.427 × 10-7
max sol 3.890 × 10-8 -100°C densità atmosferica
5.313 × 10 -6
1.350 × 10-8 4.138 × 10-6
500 1.523 × 10-7
2.711 × 10-7 5.668 × 10-6
1.120 × 10-7 4.324 × 10-6
400 1.590 × 10-7
1.154 × 10-6 5.923 × 10-6
1.270 × 10-6 4.521 × 10-6
300 1.664 × 10-7
6.144 × 10-6 6.193 × 10-6
Trieste, 24 novembre 2020 35Esercizio 1/2
Ø Stimare i momenti di torsione esterni (di disturbo) che
agiscono sulla S/C
Ø Supponendo di avere un sistema di 3 RW (R=0.075 m, vel.
spin=1000 rpm), stimare quale debba essere la capacita’ di
immagazzinamento di momento (L=Torsione x tempo
accumulo) e la massa di ciascuna RW
✦ Suggerimenti tab 11.12 smad
S/C characteristics
mass 2089 kg
o Icilindro = ½ mr2 length 4 m
diameter 2.6 m
(lungo l’asse longitudinale)
coeff. reflectivity 0.6
o Icilindro =r m(r2/4+l2/12) magnetic dipole 2.5 A m2
drag coeff. 2.5
(lungo l’asse trasversale)
l diff. center pressure / center gravity 0.40 m
o L = 0.707 TD (τ/4) RW
Operational characteristics
o L·θ = TD (τ/4) MW orbit altitude 600 km
TD = torsione di disturbomax angular dev. from local vertical 1 deg
mission lifetime 5 years
τ = periodo orbitale
Trieste, 24 novembre 2020 36S R] RW OdS S c aWabS[O Esercizio
RW 2/2bV cabS ]abW OW
SZØQWZWSupponendo
R ] W ]aWhW] S ]un sistema
di avere ]abO Sdi 2a[] hO S
thruster
c(posti ai bordi
O d]ZbO del cilindro
OZ UW] ] Δb4)inaposizione
>a 4+ (opposta)
a per
S2 smorzare ogni RW (una volta al giorno, Δt=1 s,
Isp=320 s), valutare:
bO RW QWOaQc bV cab
Ø la spinta di ciascun thrust
[S ] b]bOZS RW W[ cZaW S bcbbO ZO dWbO RSZ aObSZZWbS
Ø Il numero totale di impulsi per tutta la vita del satellite
SZZS ØbSil propellente
SQSaaO W] necessario
✦ Suggerimenti: E
FcUUS W[S obW2 F = L / ( l Δt )
] 4 ' l Δb F=thrust, L=momento immagazzinato dalla ruota,
4bV cab 4[][S l =braccio,
b] W[[OUOhhW di accensione
Δt=tempoOb] ROZZO c]bO thruster
l 4P OQQW]
Δb4bS[o ]Impulso
RW OQQS totale
aW] S =
bV FcabS
Δt
o Isp =
] >[ cZa] b]bOZS 4 F /Δb
(g ΔM/Δt )
]Trieste,
> 424 novembre
' U Δ 2020
'Δb 37INPUTS: OUTPUTS:
S/C characteristics
mass 2089 kg
cylinder length 4 m
cylinder diameter 2.6 m
min mom. inertia 1765.205 kg m2 1765.205
max mom. inertia 3667.935833 kg m2 3667.9358
coeff. reflectivity 0.6
magnetic dipole 2.5 A m2
drag coeff. 2.5
diff. center pressure / center gravity 0.4 m
area to Sun 5.309291585 m2
area to atmosphere 16.3362818 m2
max area 10.4
v2 57121351.19 m2/s2 7557.8668 m/s
operational characteristics
orbit altitude 600 km
max angular dev. from local vertical 1 deg 0.0174533 rad
mission lifetime 5 years 157680000 s
orbit radius 6978 km
period 5801.228868 s
1.611452463 hr 14.893396 numero orbite 1 day
Trieste, 24 novembre 2020 38radius 0.075 m
sum quadr sum (indip)
REACTION WHEEL 2 1
Storage 4.200E-01 2.279E-01 N.m.s 1 orbits
1.141E+04 11414.741 N.m.s lifetime
w 1000 rpm
104.7 rad/s
m 1.426 0.774 kg
0.258 kg
storage 1 day tot 6.255E+00 3.394E+00 N.m.s
/wheel 2.085E+00 1.131E+00 N.m.s
MOMENTUM WHEEL
theta 1 deg
Storage 34.034 18.467 N.m.s
m 115.556 62.702 kg
THRUSTER
L 2.085E+00 N.m.s
dt 1 s
thrust 13.90 N 41.697684
impulso 13.90 N.s 76098.273
Isp 320 s
Mp 0.004427634 kg 0.0265658
numero tot/wheel 1825 5475
Mp/wheel 16.16086334 kg
Mp tot 48.48259001 kg
Trieste, 24 novembre 2020 39Sorgenti di Torsioni
Ø Thrusters (external)
Ø Magnetic torque (external)
Ø Gravity-gradient torque (external)
Ø Aerodynamic torques (external)
Ø Solar radiation pressure (external)
Ø Mass movement (internal)
Ø Momentum storage torquers
(internal)
Trieste, 24 novembre 2020 40ASSETTO 2/4 Trieste, 24 novembre 2020 41
ASSETTO 3/4 Trieste, 24 novembre 2020 42
ASSETTO 3/5
Modi operativi:
Ø Inserzione in orbita
Ø Acquisizione iniziale
Ø Normale
Ø Slew
Ø Contingency
Ø Speciale
Trieste, 24 novembre 2020 43Puoi anche leggere