I droni: una soluzione efficace verso l'automazione del processo di rilevamento 3D - Marco PIRAS
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

I droni: una soluzione efficace verso
l'automazione del processo di rilevamento 3D
Marco PIRAS
Torino, 24 novembre 2016
Sommario
1. Introduzione
• La definizione di geomatica
• le componenti
• Le informazioni 3D
2. Mezzi aerei non convenzionali
• Definizione, caratteristiche
• Ala fissa e multirotore
• Le soluzioni sperimentate
3. Gli UAV per l’estrazione di informazioni 3D
• Documentazione 3D
• Territorio e ambiente
• Termografia
4. Alcune considerazioni riassuntive
• Uno sguardo al futuro
Il gruppo del Politecnico di Torino
Andrea Lingua (PA)
Paolo Maschio Irene Aicardi (Dr) Filiberto
Nannina Spanò (PA) Marco Piras (PA) Chiabrando (RTD)
Piero Boccardo
(PA)
Fulvio Rinaudo
(PA)
Paolo Dabove Francesca Noardo (Dr)
(RTD)
Nives Grasso (Dr)
Ambrogio Manzino Horea Bendea
Alberto Cina (PA) (PO)
Cinzia Taglioretti (Dr)
Tamara Bellone (PA)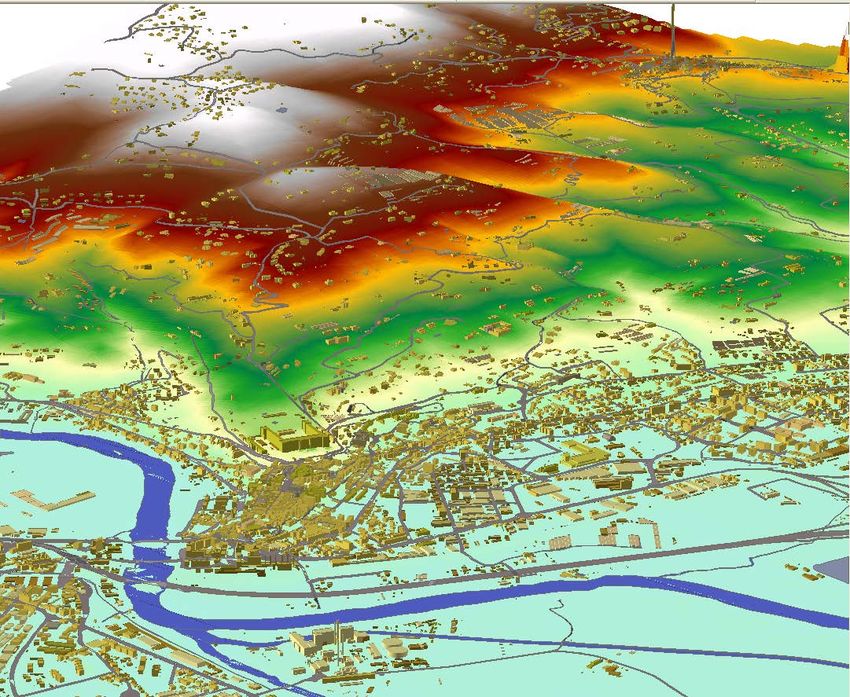
Introduzione
L’importanza della Geomatica
L’architettura, l’archeologia e l’ingegneria civile, edile e ambientale
svolgono attività progettuali applicative su porzioni del mondo reale.
Per definire correttamente gli interventi operativi è necessaria una
conoscenza adeguata dell’oggetto dell’intervento:
- corretta (precisione e dettaglio)
- completa (geometria e aspetto)
- sostenibile (tempi, costi, prestazioni)
?
La geomatica fornisce da alcuni anni
strumenti e tecniche che permettono di
acquisire queste informazioni in modo
efficace, rapido e relativamente
economico (automatismo)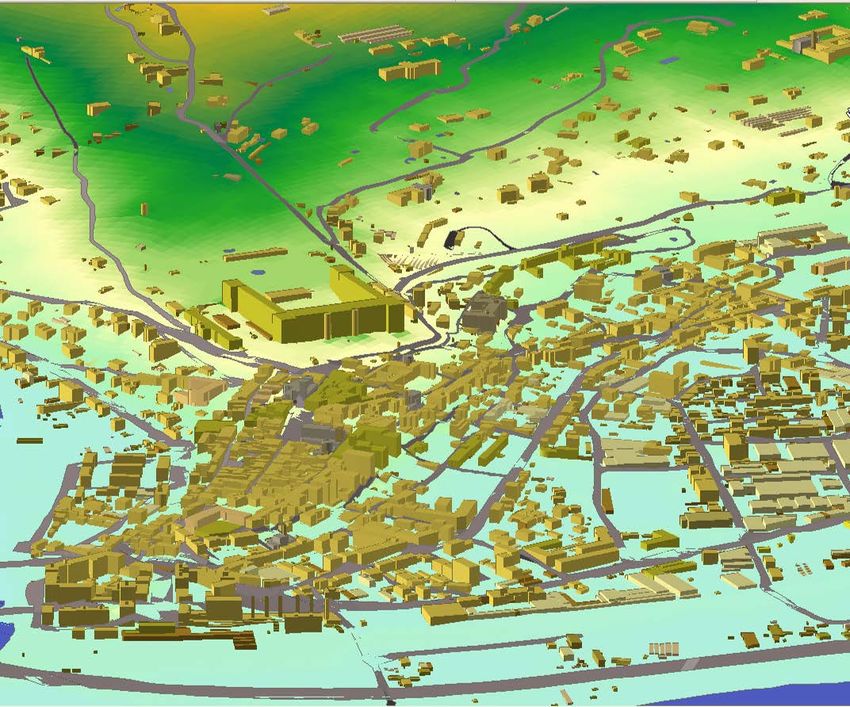
Introduzione
«La Geomatica è la scienza applicata inerente l’acquisizione, la modellizzazione, la
memorizzazione strutturata, l’analisi e la rappresentazione di dati a referenza
spaziale.» (Geodesia + Informatica)
Posizionamento, navigazione
Fotogrammetria UAV
e rilevamento
Image navigation Geodesia fisica
and Positioning
Statistica
Mobile Mapping
System GIS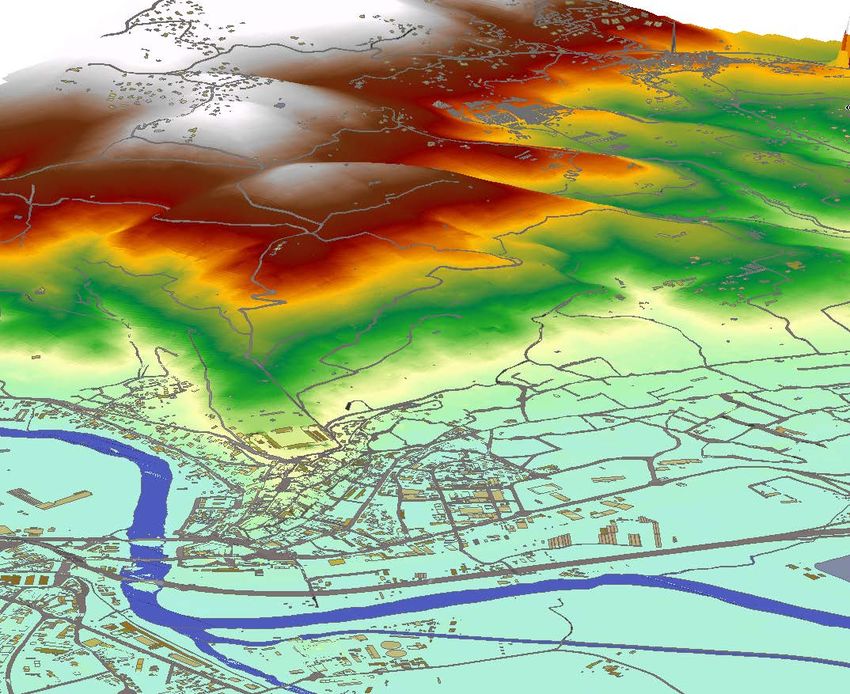
Introduzione
Google Earth, Maps, Street view
Microsoft Bing, Pictometry
3D Model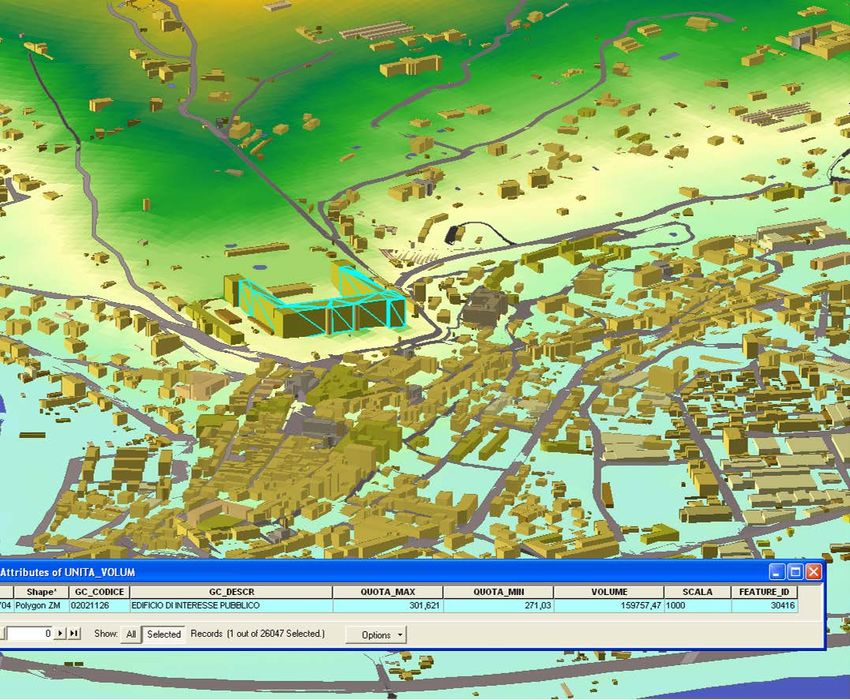
Introduzione
Le informazioni tridimensionali
Y
Mezzi aerei non convenzionali Julius Neubronner farmacista (1907)
Mezzi aerei non convenzionali
George R. Lawrence
(1906)
Gaspard Felix
Tournachon
Nadar (1855)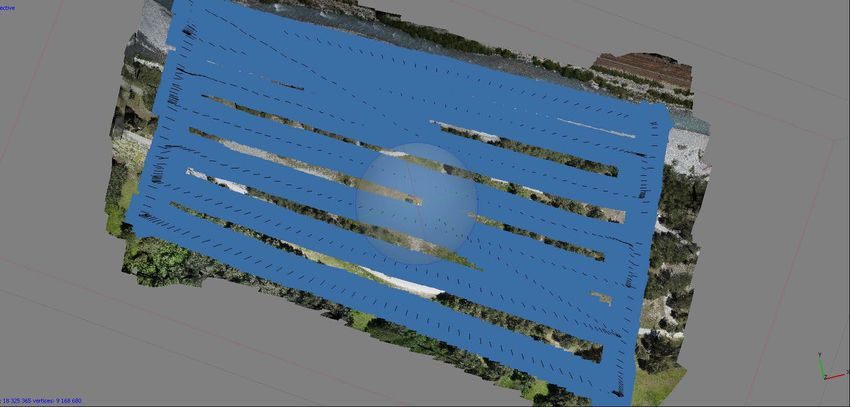
Mezzi aerei non convenzionali
Definizione
“Gli UAV (Unmanned Aerial Vehicles) sono veicoli aerei motorizzati
riutilizzabili senza pilota“ (van Blyenburg 1999)
LiDAR e fotogrammetria digitale è
consolidata da piattaforma aerea
(aereo o elicottero) con pilota:
Costi elevati per la strumentazione
e di gestione
UAV nascono con scopi militari
(ricognizione e altre questioni
belliche): non per la geomatica e il
rilevamento del territorio
Per applicazione civili, soluzioni
costose senza il software di post-
processingMezzi aerei non convenzionali
Ambiti applicativi
PRECISIONE
[mm]
104
REMOTE SENSING
GNSS
FOTOGRAMMETRIA
103 CON UAV
102 FOTOGRAMMETRIA
LiDAR AEREA
TOTAL
STATION
10 FOTOGRAMMETRIA DGNSS
CLOSE- RANGE
1
10-1 FOTOGRAM.
INDUSTRIALE
TEODOLITE
10-2 METGROLOGIA
INDUSTRIALE
10-3
INTERFERO
METRIA
1 10 102 103 104 DIMENSIONI OGGETTO /AREA
[m]Mezzi aerei non convenzionali
Le soluzioni sperimentate
Hexakopter
Mikrokopter/Arducopter
Paylod 3.5 kg (con batterie)
12 min di tempo di volo
Volo autonomo
Ebee di SenseFly
750 g di peso tutto compreso
45 min di volo
Volo autonomoMezzi aerei non convenzionali Il sistema multi-rotore
Mezzi aerei non convenzionali
Il sistema multi-rotore
Mezzi in grado di effettuare un volo autonomo
e rilevare il proprio percorsoMezzi aerei non convenzionali L’automazione dell’acquisizione
Mezzi aerei non convenzionali
L’automazione del data processing
Computer Vision
(SfM)
fotogrammetria
digitale
OE approx images
Image enhancement
(Wallis Filter)
Feature recognition
(SURF e/o SIFT)
Photogrammetric traingulation (LMS and MQ)
DSM OE final
approx param
DDSM generation (GIC3) and filtering
(S2MF)
Precise orthophotos generation
Precise solid
OrthophotosMezzi aerei non convenzionali
Immagine solida
(Dequal, Lingua, et al. 2004)
L’OS è la fusione del contenuto
metrico bidimensionale e cromatico
dell’ortofoto con l’informazione
tridimensionale di un DDSM
(Dense Digital Surface Model) Z
dell’oggetto rappresentato.
La posizione del pixel selezionato
dell’ortofoto fornisce le coordinate
X
planimetriche mentre il modello
altimetrico contiene la quota
corrispondente. Y
L’ortofoto solida può essere
prodotta in modo quasi
automatico.Gli UAV per le infomazioni 3D
Nuovi modelli per l’antica Segusium
realizzazione e mantenimento di una formazione
studentesca continua nel campo delle tecnologie
avanzate del Rilievo Metrico 3D e del
Telerilevamento con tecniche innovative,
sperimentandone l’integrazione, da mettere a
disposizione delle necessità di documentazione
dell’ambiente e del patrimonio costruito in occasione
delle emergenze ambientali, oppure destinate ai beni
soggetti a emergenze anche ordinarie continue.Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
Gli UAV per le infomazioni 3D Nuovi modelli per l’antica Segusium
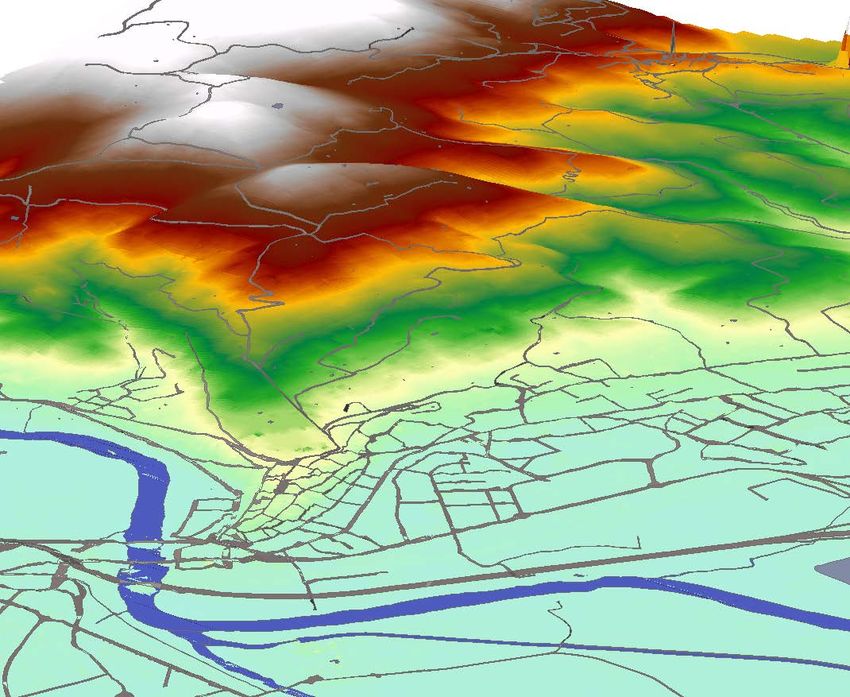
Gli UAV per le infomazioni 3D
Acquisizione di informazioni ambientali
Test su diversi software fotogrammetrici con strumenti di dense matching
Caso studio ROVENAUD
Elaborazioni
Test estrazione di profili
Confronto risultati tra
mesh con software diversi
generazione di sezioni:
laser (Scene)
fotogrammetria
(PhotoScan)
fotogrammetria
(MicMac)
MicMacGli UAV per le infomazioni 3D Le risorse Forestali
Gli UAV per le infomazioni 3D
Un’applicazione termografica
camera termica industriale
(FLIR A65)
RGB video
200 g (action cam)
Bolometro 640x512 pixel;
Elevata frequenza 30 HzGli UAV per le infomazioni 3D Acquisizione termiche: edifici
Gli UAV per le infomazioni 3D
Un’applicazione termografica
Elaborazione con Photoscan
per la generazione della
nuvola di punti dal filmato,
dell’ortofoto e del modello
altimetrico
Mediante georeferenziazione
si posizionano le immagini
termiche sull’ortofotoGli UAV per le infomazioni 3D Un’applicazione termografica
Gli UAV per le infomazioni 3D
Un’applicazione termografica
QGIS – Surface analysis
Analysis r.slope.aspectPuoi anche leggere

















































