GUIDA RAPIDA - CON INTERFACCIA MIR ROBOT 2.0 OTTOBRE 2017, V.1.02017 V.1.2 - MOBILE INDUSTRIAL ROBOTS
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

Ottobre 2017, v.1.02017 v.1.2
con interfaccia MiR Robot 2.0
Guida rapida
it
300003-it, 1.6 - 01/2019
Per la conformità ai requisiti di marcatura CE,
prima di utilizzare il robot è necessario
installare la pulsantiera di emergenza.
Versione documento Data di pubblicazione Versione HW
1.4 02/02/2018 2.0
1.5 20/08/2018 2.1
1.6 04/01/2019 3.0
Informazioni sulla presente Guida rapida
Informazioni sulla presente Guida rapida
La presente Guida rapida spiega come disimballare e avviare il MiR100™. Ulteriori
informazioni su come creare le mappe, configurare le missioni e altro sono disponibili
nella Guida di riferimento dell'interfaccia MiR Robot 2.0. Le informazioni sulle specifiche
del prodotto, sulla manutenzione e sulla risoluzione dei problemi sono disponibili nel
Manuale dell'utente del MiR100™. Tutti i manuali sono disponibili sull'unità USB in
dotazione, inoltre si possono scaricare dal nostro sito Web.
Contenuto della confezione
1. Il robot
2 Kit MiR100
• Pulsantiera di arresto d'emergenza, antenna esterna e 4 bulloni M10x40
• Due cavi di ricarica, uno per gli impianti a 110 V e uno per quelli a 220 V
• Un caricabatterie esterno da 24 VCC, 10 A
3 Cartella MiR contenente:
• Documenti cartacei: Guida rapida del MiR100 in inglese (e nella lingua locale se
disponibile), scheda password, dichiarazione di conformità CE, istruzioni per
l'installazione dell'arresto di emergenza
• Unità USB: Video Primi passi, Manuale dell'utente del MiR100™, dichiarazione di
conformità CE, altri manuali.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 1
•
•
•
Disimballaggio del MiR100™
Disimballaggio del MiR100™
Fase Azione
1 Rimuovere il coperchio del pallet ed estrarre la scatola con il kit MiR100.
2 Rimuovere l'imbottitura di schiuma, i blocchi di schiuma laterali e il telaio del pallet.
3 Posizionare il coperchio del pallet in modo che funga da rampa sul retro del robot.
Conservare l'imballaggio per trasportare il robot in futuro.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 2
•
•
•
Accensione
Accensione
Fase Azione
1 Afferrare i due angoli arrotondati e
sollevare con cautela il coperchio.
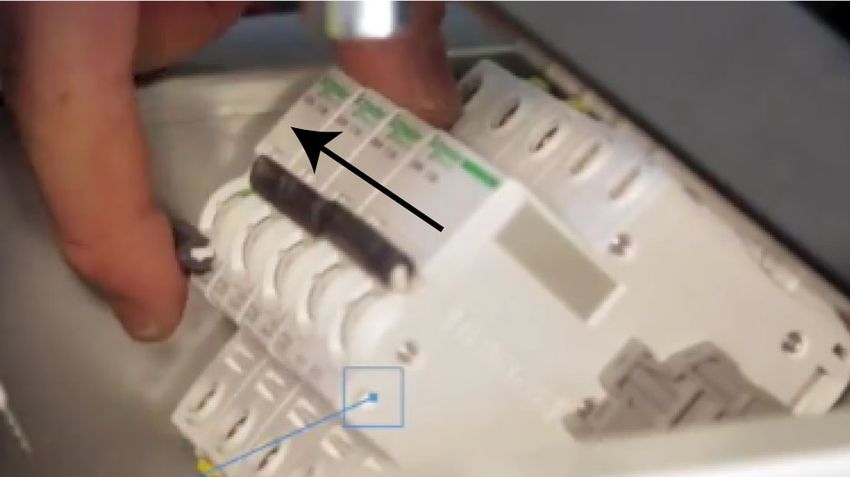
2 Collegare uno dei due cavi della batteria al Alzare i quattro interruttori nell'angolo vicino
connettore sulla parte superiore della allo scanner laser anteriore. Iniziare
batteria. dall'interruttore di rete da 32 A, procedendo
dall'esterno verso l'interno.
Il secondo cavo è utilizzabile per una
batteria supplementare.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 3
•
•
•
Accensione
Fase Azione
3 Prima di richiudere, verificare che il
sezionatore della batteria sia chiuso
(entrambi gli indicatori gialli rivolti verso
l'indicazione ON)
4 Posizionare con cura il coperchio sopra le Installare e collegare la pulsantiera di arresto
aperture del connettore. d'emergenza sulla sommità del coperchio del
robot.
Se si prevede di installare un modulo superiore sopra il robot, il pulsante di
emergenza deve essere posizionato in un punto facilmente accessibile.
Consultare il manuale dell'utente del MiR100.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 4
•
•
•
Accensione
Fase Azione
5 Collegare l'antenna al connettore sulla sommità del coperchio del robot. Prima di fissare
l'antenna, rimuovere il tappo di plastica dal connettore.
L'antenna si può abbassare e ruotare in tutte le direzioni, per funzionare anche
sotto un modulo superiore.
6 Premere il pulsante di alimentazione blu, Premere il pulsante di ripristino sulla
nell'angolo, per avviare il robot. pulsantiera di emergenza, quando si illumina.
Il robot si accende e si illumina in giallo La luce gialla del robot ora rimane fissa,
lampeggiante per un breve istante, quindi indicando che il robot è in pausa, pronto
passa alla modalità di arresto d'emergenza, all'uso.
indicata da una luce rossa fissa.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 5
•
•
•
Connessione
Connessione
Fase Azione
1 Su un PC, un tablet o uno
smartphone, accedere al menu
WiFi, individuare il nome del
robot e stabilire la connessione.
In un browser, aprire la pagina
mir.com.
Accedere all'interfaccia MiR
Robot.
Il nome utente e le
password per
accedere alla
connessione WiFi del
robot e all'interfaccia
si trovano sulla scheda
cartacea in dotazione;
consultare il manuale
dell'utente del
MiR100.
2 Una volta eseguito l'accesso,
premere Manual control
(Controllo manuale), sull'icona
del joystick: il robot passerà alla
modalità di controllo manuale;
a quel punto, con il joystick,
guidare il robot lungo la rampa.
La luce del robot
diventa blu, indicando
che il robot è in
modalità manuale e
si può controllare con
il joystick.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 6
•
•
•
Connessione
Fase Azione
3 Si consiglia di far scendere il robot lungo la rampa a marcia indietro.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 7
•
•
•
Ricarica del robot
Ricarica del robot
Il robot viene consegnato con la batteria carica e può funzionare fino a tre ore prima di
essere ricaricato. Seguire questa procedura per caricare il robot con il cavo di ricarica in
dotazione:
Fase Azione
1 Rimuovere l'angolo posteriore tirandolo Collegare quindi il caricabatterie alla presa del
verso di sé. Le prime volte potrebbe robot e a una presa di corrente. Premere
essere necessario applicare una certa l'interruttore a due posizioni sul robot per
forza. iniziare la carica.
Per evitare che si scarichi
velocemente, durante la
ricarica è consigliabile
spegnere il robot.
Usare solo il cavo di ricarica
originale.
2 Dopo quattro ore e mezza al massimo, il robot è completamente carico. Quando la
batteria è completamente carica, il robot emette una luce verde.
3 Premere l'interruttore a due posizioni e scollegare il cavo dal robot. Richiudere il
coperchio scorrevole nell'angolo.
Il robot rileva la presenza del cavo e il fatto che l'interruttore di carica è
premuto: in entrambi i casi passerà allo stato di arresto di emergenza.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 8
•
•
•Prova del robot
Prova del robot
Prima di utilizzare il robot, è consigliabile verificare che tutti i componenti e i processi
interni funzionino come previsto.
1. Accedere all'interfaccia Robot MiR; consultare la sezione Connessione a pagina 6.
2. Accedere a Monitoring > Hardware health (Monitoraggio > Condizioni dell'hardware).
3. Quando tutti i componenti di un gruppo sono in condizioni ottimali, il gruppo è
contrassegnato da un punto verde. Se uno o più componenti di un gruppo non
sono in condizioni perfette, il gruppo sarà contrassegnato con un punto giallo o
rosso e si potrà visualizzare il contenuto del gruppo facendo clic sulla freccia verde
per vedere quali componenti non funzionano correttamente e individuarne il
motivo.
Figura 2.1. Estratto del menu Hardware Health (Condizioni dell'hardware). Messaggio: OK
indica che i componenti del gruppo funzionano correttamente.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 9
•
•
•Prova del robot
Spegnimento del robot
Fase Azione
1 Arrestare il robot. Premere quindi il Attendere che la luce del robot si
pulsante di alimentazione blu per spenga. A questo punto, il robot
spegnere il robot. Durante la fase di non è più alimentato.
spegnimento la luce diventa gialla e si
attenua.
Se si spegne il robot per trasportarlo o per sottoporlo a un intervento di assistenza
o di riparazione, è necessario aprire anche il sezionatore della batteria e
scollegare il cavo della batteria; consultare il manuale dell'utente del MiR100.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 10
•
•
•Note di sicurezza generali
Note di sicurezza generali
• Verificare il corretto fissaggio dei carichi durante il trasporto
Pericolo di lesioni personali in caso di rovesciamento del robot o caduta del carico.
Tutti gli accessori e i carichi presenti sulla sommità del robot devono essere fissati
correttamente ed essere conformi alle specifiche.
• Evitare perdite di liquidi durante il trasporto
Pericolo di lesioni personali in caso di perdite di liquidi.
Verificare che i carichi contenenti liquidi non perdano, durante il trasporto.
• Usare solo il caricabatterie originale
Pericolo di lesioni personali e/o danni al robot.
L'utilizzo di un caricabatterie diverso da quello fornito dal produttore può
danneggiare la batteria e provocare incendi.
• Aggiornare le mappe per evitare potenziali rischi sul percorso
Pericolo di lesioni personali e/o danni al robot.
Aggiornare sempre le mappe per evitare il transito in zone pericolose, ad esempio
vicino alle scale.
• Non condurre il veicolo in modo irresponsabile
Pericolo di lesioni personali e/o danni al robot.
Il robot non deve transitare vicino a bordi con rischio di caduta e non deve essere
utilizzato in modo irresponsabile.
• Non utilizzare il robot per trasportare persone
Rischio di lesioni personali e/o danni al robot.
Il robot non deve mai essere usato per trasportare persone. In caso contrario perderà
la conformità alla norma EN 1525 relativa alla sicurezza dei carrelli senza operatore.
• Evitare pendenze superiori al 5%, lungo il percorso
Rischio di lesioni personali e/o danni al robot.
La pendenza (rampe o di altro tipo) non può superare il 5%, altrimenti il robot può
slittare.
• Condurre il robot solo su superfici uniformi e asciutte
Rischio di lesioni personali e/o danni al robot.
Su superfici bagnate e irregolari il robot può slittare.
• Non sovraccaricare il robot
Rischio di lesioni personali e/o danni al robot.
Il carico utile massimo sopra il robot è di 100 kg (220 libbre) kg. Oltre questo limite,
il carico può rovesciarsi o cadere e il robot può subire danni.
• Non utilizzare il robot a bordo di imbarcazioni
Rischio di lesioni personali e/o danni al robot.
A causa dell'instabilità dovuta al movimento della nave, il robot può slittare.
• Interrompere immediatamente l'alimentazione dopo aver rimosso il coperchio
superiore
Rischio di lesioni personali e/o danni al robot.
Interrompere l'alimentazione per evitare cortocircuiti.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 11
•
•
•Batteria al litio
• Solo per uso in interni
Rischio di danni al robot.
Il robot è destinato solo all'uso in interni e non deve mai essere utilizzato all'aperto.
• Evitare di lasciare piccoli oggetti sul pavimento nell'area del robot
Rischio di danni materiali o di danni lievi al robot.
Il robot non è in grado di rilevare gli oggetti di dimensioni inferiori a 50 mm e può
passare sopra gli oggetti più piccoli.
• Rimuovere gli oggetti inopportuni dal pavimento, nell'area del robot
Rischio di esecuzione inefficiente delle istruzioni.
Il robot aggirerà gli oggetti non indicati sulla mappa, ma in questo modo l'efficienza
del percorso programmato può diminuire.
• Evitare il surriscaldamento dei componenti
Rischio di danni al robot o ai suoi componenti.
La temperatura ambiente nell'area del robot non deve superare i 50°C (122°F).
• Evitare di esporre il robot ad ambienti eccessivamente umidi o asciutti
Rischio di danni al robot o ai suoi componenti.
Batteria al litio
Le batterie al litio sono importanti fonti di alimentazione ad alta potenza progettate per
offrire la massima sicurezza.
Potenziale rischio
Le batterie al litio possono surriscaldarsi, esplodere o incendiarsi e causare gravi
lesioni, se vengono utilizzate in modo improprio a livello elettrico o meccanico.
Attenersi alle seguenti precauzioni per la manipolazione e l'utilizzo delle batterie al
litio:
• Disattivare la batteria quando non è in uso.
• Non cortocircuitarla, né ricaricarla o collegarla invertendo la polarità.
• Non esporla a temperature che non rientrano nell'intervallo indicato; non
incenerirla.
• Non schiacciare, forare né smontare la batteria. La batteria contiene dispositivi di
sicurezza e di protezione che, se danneggiati, possono causare surriscaldamento,
esplosioni o incendi.
• Evitare che la batteria si bagni.
• Se la batteria perde liquido e il liquido entra in contatto con un occhio, non strofinare
l'occhio. Sciacquare a fondo con acqua e rivolgersi immediatamente a un medico. Se
trascurato, il liquido della batteria può causare lesioni oculari.
• Utilizzare solo il caricabatterie originale e seguire sempre le istruzioni del produttore
della batteria.
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 12
•
•
•Batteria al litio
•
•
MiR100™ Guida rapida Interfaccia Robot 2.0, 300003-it, 01/2019 v.1.6 • 13
•
•
•Copyright ed esclusione di responsabilità Tutti i diritti riservati. Nessuna parte del presente manuale può essere riprodotta in alcuna forma senza esplicita autorizzazione scritta di Mobile Industrial Robots ApS (MiR). MiR non fornisce alcuna garanzia, né esplicita né implicita, in relazione al presente documento o al suo contenuto. Inoltre, il contenuto del documento è soggetto a modifiche senza preavviso. Nella stesura del presente manuale è stata adottata la massima cura, tuttavia MiR declina qualsiasi responsabilità in relazione a errori, omissioni o eventuali danni derivanti dall'utilizzo delle informazioni qui contenute. Copyright © 2017-2019 by Mobile Industrial Robots Contatti del produttore: Mobile Industrial Robots Emil Neckelmanns Vej 15F DK-5220 Odense SØ www.mir-robots.com Telefono: +45 20 377 577 E-mail: support@mir-robots.com CVR: 35251235
Puoi anche leggere