3D CPS SERIE Control and Picking Solution - ISS
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
3D CPS SERIE Control and Picking Solution
“C’è vero progresso solo quando i vantaggi di una nuova tecnologia diventano per tutti” Questa famosa frase di Henry Ford ha ispirato il lungo percorso di sviluppo dei sistemi 3D CPS in quanto ISS ha rilasciato al mercato tale soluzione non quando ha raggiunto l’affidabilità ma solo quando ne ha reso semplice l’utilizzo. In sintesi: 2010 – ISS teorizza il vassoio virtuale, cioè l’idea che si possa eliminare il vassoio fisico su cui posizionare ordinatamente gli oggetti dotando il robot della capacità di prelevarli direttamente dal contenitore nel quale si trovano alla rinfusa. 2012 – l’attività di ISS si concretizza in una prima soluzione che, osservando una scena, è in grado di trovare gli oggetti in essa contenuti e di determinarne la posa così da permettere ad un robot di prelevarli. L’utente, senza scrivere linee di codice, ma semplicemente configurando il sistema, può trovare qualsiasi oggetto. 2015 – ISS rilascia al mercato la prima versione del sistema che, oltre a trovare gli oggetti della scena, è in grado di scegliere quale prelevare, definire la migliore modalità di presa e guidare il robot lungo traiettorie prive di collisioni a prelevarlo: 3D CPS 1.0. Il sistema è rivoluzionario: il programmatore del robot si limita a chiedere un oggetto (come se fosse posizionato su un vassoio), il sistema 3D CPS lo preleva dal mucchio in modo autonomo. Il concetto di vassoio virtuale è passato dalla teoria alla realtà. 2016 – ISS rilascia l’aggiornamento / nuova release da 1.0 a 2.0. 2018 – ISS rilascia una seconda versione del sistema (3D CPS 4.0) più veloce e ancora più semplice da utilizzare. 2019 – viene rilasciato il 3D CPS Fast che introduce una tecnica di rilievo della scena tridimensionale basato su un sistema stereoscopico con proiezione di pattern che risulta più accurato e veloce della triangolazione laser su piccoli campi di lavoro. Per questo il 3D CPS, in qualunque versione, è semplice da usare come un vassoio (perché la complessità del prelievo dal contenitore è a totale carico del sistema) ed è flessibile come un operatore umano (in quanto configurando il sistema trova e sceglie qualsiasi oggetto di forma definita).
OSSERVA
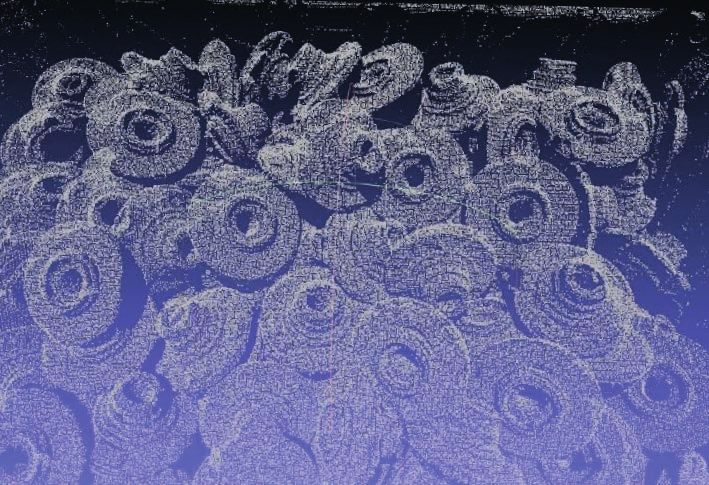
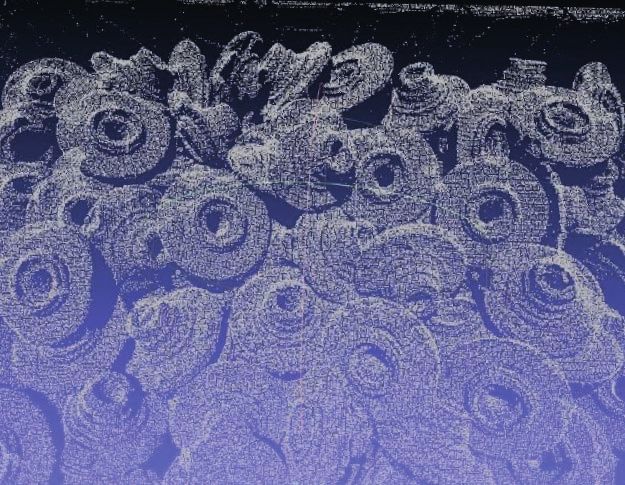
I sistemi 3D CPS si avvalgono della tecnologia di scansione a
triangolazione laser e di quella a luce strutturata codificata.
Entrambe le soluzioni si caratterizzano per:
• accuratezza di misura sub millimetrica;
• insensibilità alla luce esterna;
• elevata velocità di esecuzione della scansione.
SCANSIONE
TROVA
L’applicativo di ricerca dei pezzi a partire dalla scansione si basa
su un robusto e veloce algoritmo di pattern matching 3D che li
identifica anche quando sono visibili solo parzialmente.
RICONOSCIMENTO
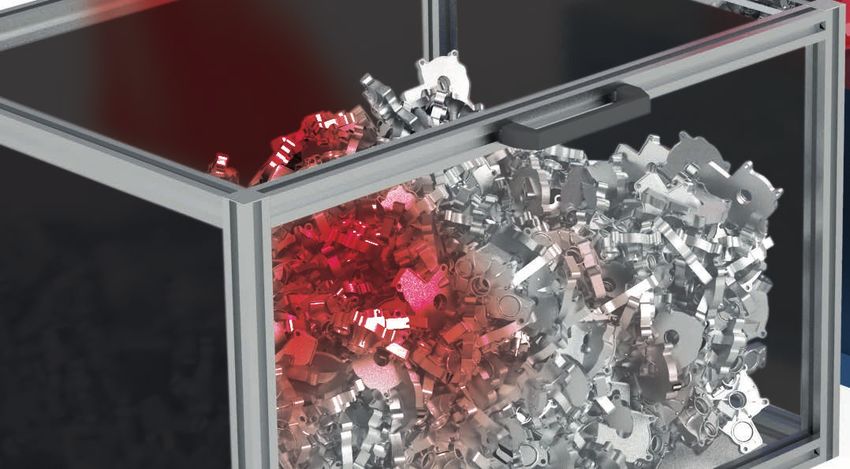
SCEGLIE
Tra tutti i pezzi trovati il sistema sceglie quello da prelevare in base
ad una serie di parametri quali lo svuotamento regolare del cassone,
l’assenza di sovrapposizioni, l’affidabilità della presa e la possibilità di
raggiungere il pezzo, di afferrarlo e di estrarlo lungo una traiettoria priva
di collisioni.
Scelto il pezzo il 3D CPS invia la traiettoria pianificata al controllore del
robot che esegue il prelievo senza la necessità che il programmatore
scriva alcun codice.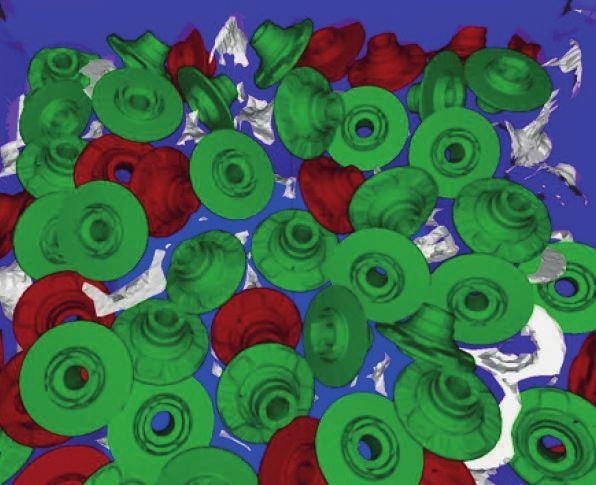
BIN PICKING E ROBOT, DAGLI ALBORI ALLA MATURITÀ 1970 – nasce il primo robot industriale idraulico Unimation che raggiunge a comando qualsiasi posizione con qualsiasi orientazione e apre teoricamente la strada alla presa di pezzi alla rinfusa. L’assenza di sistemi di visione sofisticati lo costringe a limitarsi a manipolare solo pezzi ordinati in cartoni o su vassoi come in figura. 1980 – il robot industriale diventa elettrico ma i sistemi di visione sono ancora troppo primitivi; la presa da contenitore è quindi impossibile se non utilizzando una periferia meccanica in grado di singolarizzare i pezzi e di posizionarli ed orientarli in modo corretto e ripetibile. Si afferma il concetto che la periferia, che deve essere specifica per ogni pezzo, consuma la flessibilità del robot. 1990 – i sistemi di visione si affacciano per la prima volta sul mercato industriale provocando una semplificazione della periferia meccanica che può limitarsi a fare arrivare un singolo pezzo su un piano retroilluminato dove una telecamera lo localizza e guida il robot alla presa. 2000 - le tecniche di pattern matching geometrico basato sull’utilizzo dei contorni degli oggetti raggiungono il mercato industriale rendendo possibile il riconoscimento dei pezzi in modo più veloce e più robusto alle variazioni delle condizioni di illuminazione ambientali. Diventa possibile riconoscere i pezzi anche se parzialmente sovrapposti e disposti alla rinfusa. 2010 – le tecniche di pattern matching tridimensionale possono finalmente essere utilizzate grazie alle aumentate prestazioni dell’hardware; i singoli pezzi possono essere individuati anche se parzialmente sovrapposti. Oggi non solo si è in grado di riconoscere gli oggetti ma si ha anche la certezza di prenderli in modo affidabile. Il sistema è in grado di individuare i pezzi e di guidare il robot per raggiungerli lungo una traiettoria libera da collisioni. Dalla filosofia di tenere il robot fuori dal cassone e di prendere i pezzi con una pinza lunga si passa a quelle di utilizzare un tool piccolo e di tuffarsi nel cassone svuotandolo completamente.

I NOSTRI SCANNER 3D CPS 2.0 LA SOLUZIONE CLASSICA PER LA PRESA DA CASSONE IL SISTEMA DI GUIDA ROBOT CHE HA PERMESSO LA DIFFUSIONE DEL BIN PICKING NELL’INDUSTRIA MANIFATTURIERA. FUNZIONALITÀ SPECIFICHE: - elaboratore integrato nell’unità di scansione; - raffreddamento tramite ventilazione forzata microfiltrata; - scansione tramite profilometro interno che deve essere movimentato dall’integratore con un movimento di rotazione o di traslazione. 3D CPS 2.0 BELT PRESA DA NASTRO CON GUIDA 3D IL SISTEMA CHE HA ESTESO I VANTAGGI DEL 3D ALLA PRESA DA NASTRO. FUNZIONALITÀ SPECIFICHE: - elaboratore integrato nella unità di scansione; - raffreddamento tramite ventilazione forzata microfiltrata; - tenendo fermo il profilometro e sfruttando il movimento degli oggetti da scandire (ad esempio quando si muovono su un nastro) è possibile realizzare una presa da nastro 3D estremamente efficace.

3D CPS 4.0 LA SOLUZIONE PER IL PRELIEVO DA CASSONE VELOCE ANCHE IN AMBIENTI POLVEROSI L’EVOLUZIONE DEL BIN PICKING SI CHIAMA 3D CPS 4.0, IL NUOVO RIFERIMENTO NEL MONDO DEI SISTEMI DI GUIDA ROBOT. FUNZIONALITÀ SPECIFICHE: - la movimentazione è gestita da un motore integrato nel sistema, che ne semplifica l’utilizzo e riduce i tempi di scansione; - l’unità di scansione può operare anche in ambienti polverosi non prevedendo una ventilazione forzata; - l’ampio volume di scansione permette di utilizzare anche robot di grosse dimensioni; - l’unità di elaborazione è esterna al box di scansione e va installata in un quadro elettrico. 3D CPS FAST LA SOLUZIONE PER IL PRELIEVO DA CASSETTA L’ESTENSIONE DEL BIN PICKING AL SETTORE DELL’ASSEMBLAGGIO CON UNA VELOCITÀ DI SCELTA SUPERIORE ALLA VERSIONE 4.0 SU VOLUMI DI LAVORO CONTENUTI. FUNZIONALITÀ SPECIFICHE: - l’unità di scansione è completamente statica; - l’illuminazione è a led infrarossi, quindi sicura ed invisibile all’operatore in modo da non causargli disagio; - l’unità di elaborazione è esterna ed è costituita da un PC industriale da installare in un quadro elettrico; di conseguenza, anche grazie alla compattezza della soluzione di scansione adottata, il box è nettamente il più piccolo della serie; - il volume di lavoro è limitato a 600 mm x 400 mm x 200 mm.

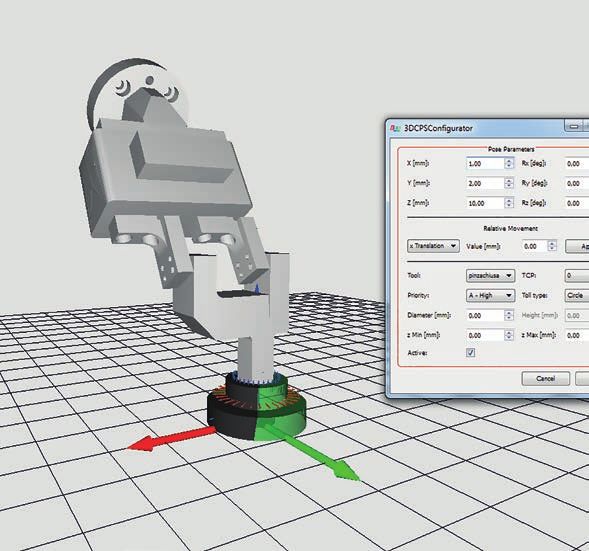
LA SUITE SOFTWARE CONFIGURATOR IL CONFIGURATOR È LO STRUMENTO CON IL QUALE, SENZA SCRIVERE ALCUNA LINEA DI CODICE, SI GESTISCE COMPLETAMENTE L’ATTIVITÀ DI PRELIEVO DEGLI OGGETTI TRAMITE ROBOT. L’OPERATORE DEVE CONFIGURARE: - l’ambiente tridimensionale in cui opera il robot, intendendo con questo il modello della cella, del robot e della pinza completa di dita di presa; - il modello del pezzo da prendere, solitamente coincidente con una vista CAD; - i possibili punti di presa con le rispettive modalità di afferraggio. DEBUGGER IL DEBUGGER PERMETTE DI ANALIZZARE IL COMPORTAMENTO DEL 3D CPS AL FINE DI INDIVIDUARE EVENTUALI CRITICITÀ ED ELIMINARLE. L’applicativo permette, tramite l’importazione di un unico file, di visualizzare sia i risultati del processo di riconoscimento delle parti disposte casualmente all’interno del cassone, sia quelli della fase di pianificazione delle traiettorie esenti da collisioni che garantiscono la corretta presa delle parti stesse da parte del robot.

“INNOVARE IL PRESENTE
CON LE TECNOLOGIE DEL FUTURO E
L’ESPERIENZA DEL PASSATO”
CONTATTI
Innovative Security Solutions
Via Lombardia 25 bis
22074 Lomazzo (CO)
Tel. +39 02.96734017 · www.issweb.it · info@issweb.it
Puoi anche leggere