SVILUPPO DI UN'INFRASTRUTTURA HAD (HIGHLY AUTONOMOUS DRIVING) - Panoramica su un modello tecnologico - HPE
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
White paper tecnico SVILUPPO DI UN’INFRASTRUTTURA HAD (HIGHLY AUTONOMOUS DRIVING) Panoramica su un modello tecnologico
White paper tecnico
SOMMARIO
1. Introduzione.......................................................................................................................................................................................................................................................................................................................... 3
1.1. Ambito del problema ......................................................................................................................................................................................................................................................................................... 4
2. Livelli di automazione .................................................................................................................................................................................................................................................................................................. 6
3. Acquisizione, trasformazione e analisi dei dati ..................................................................................................................................................................................................................................... 6
3.1 Principi chiave ........................................................................................................................................................................................................................................................................................................... 6
4. Il percorso end-to-end dei sistemi HAD ..................................................................................................................................................................................................................................................... 7
4.1 Registrazione dei dati ........................................................................................................................................................................................................................................................................................ 8
4.2 Acquisizione dei dati........................................................................................................................................................................................................................................................................................... 8
4.3 Data lake ........................................................................................................................................................................................................................................................................................................................ 9
4.4 Tecniche SIL (Software-in the-loop) e HIL (Hardware-in the-loop) ...................................................................................................................................................................... 9
4.5 Archiviazione/backup .....................................................................................................................................................................................................................................................................................10
5. Servizi e partnership ..................................................................................................................................................................................................................................................................................................10
5.1 Realizzazione ..........................................................................................................................................................................................................................................................................................................10
5.2 Esecuzione ................................................................................................................................................................................................................................................................................................................10
5.3 Utilizzo ..........................................................................................................................................................................................................................................................................................................................11
5.4 Partner ..........................................................................................................................................................................................................................................................................................................................11
6. Conclusione ........................................................................................................................................................................................................................................................................................................................11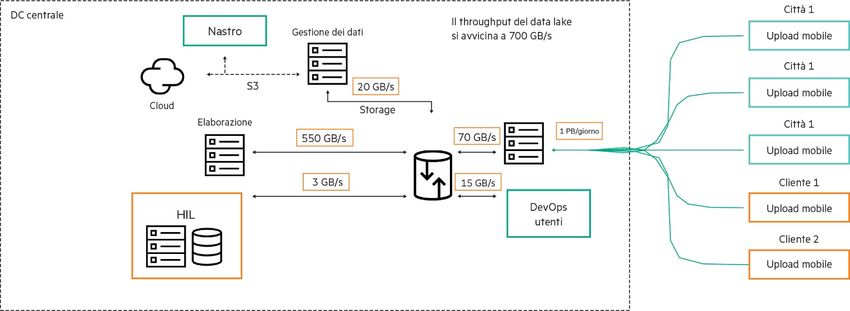
White paper tecnico Pagina 3 1. INTRODUZIONE La tecnologia dedicata ai veicoli autonomi è destinata a rivoluzionare l'industria dei trasporti, con profonde implicazioni a lungo termine per la nostra società e per il nostro modo di vivere, lavorare e fare business. La guida autonoma promette di ridurre il numero di vittime della strada, limitare gli ingorghi e far risparmiare tempo, introducendo inoltre nuovi paradigmi per i trasporti, come ad esempio taxi a guida autonoma e modelli di proprietà di veicoli condivisi con approccio Transportation-as-a-service. I prodotti e i pacchetti di servizi correlati alla guida autonoma includono poi sistemi di parcheggio e manutenzione automatici e, visto il minor numero di auto sulla strada, si ottengono anche vantaggi in termini di utilizzo del suolo e progettazione urbanistica. A questo si aggiungono significativi risparmi sui costi, possibili tramite un uso più efficiente dei carburanti e costi operativi inferiori. Tuttavia i veicoli autonomi creano anche notevoli problematiche: • Guidare può essere complicato con le auto convenzionali, a maggior ragione per un sistema failsafe automatico che deve operare con una bassissima tolleranza agli errori in tutte le condizioni di guida. • Il volume di dati generati e utilizzati dai veicoli autonomi è molto elevato: secondo un nuovo report, si prevede che il mercato globale dei veicoli connessi crescerà del 270% entro il 2022. Le stime parlano di oltre 125 milioni di autovetture con connettività incorporata consegnate in tutto il mondo tra il 2018 e il 2022. 1 • Lo sviluppo di questa tecnologia costerà nel complesso miliardi di dollari, mentre il prezzo dei singoli veicoli a guida completamente autonoma potrebbe arrivare a 100.000 dollari. 2 • L’infrastruttura richiederà una serie di aggiornamenti. Le strade dovrebbero diventare più smart al fine di garantire sicurezza e coerenza per le nuove tipologie di veicoli, ma raggiungere questi obiettivi a livello internazionale o anche all’interno delle città sarà complicato. • Dovranno essere considerati anche problemi normativi e di responsabilità (ad esempio, se un’auto a guida autonoma causa un incidente, chi ne risponde: il conducente, la casa automobilistica o l’azienda che ha sviluppato il software?) • I clienti devono ricevere informazioni e maturare un’adeguata consapevolezza per effettuare scelte informate, senza lasciarsi influenzare da voci, false credenze o idee errate sul settore e la tecnologia. Da quando esistono le automobili, la tecnologia ha definito gli standard più avanzati in materia di sicurezza. A partire dagli anni '70, le case automobilistiche hanno introdotto gli airbag e salvato migliaia di vite. I freni con sistema antibloccaggio, diffusi dagli anni '90, riducono il coinvolgimento in incidenti non mortali dal 6 all’8%. 3 Tuttavia negli incidenti automobilistici muoiono ancora circa 1,3 milioni di persone ogni anno. 4 La combinazione delle funzioni più avanzate e potenti di High Performance Computing, machine learning, nuove tecnologie di rilevamento (ad esempio LIDAR) ed edge computing offre la prospettiva di una drastica riduzione di queste morti assurde attraverso l’implementazione della guida autonoma. Anche la congestione del traffico sta peggiorando con la crescita delle economie e l’accelerazione dell’urbanizzazione. Chi usa l’auto per recarsi al lavoro in città trascorre mediamente 40 minuti al giorno nel traffico. In un anno, si arriva a 167 ore perse, più di 4 settimane lavorative full-time trascorse al volante, senza la possibilità di concentrare la propria attenzione su niente altro, se non ovviamente la guida. Le autovetture autonome rivestiranno un ruolo essenziale nel futuro delle città intelligenti e influenzeranno la progettazione e la realizzazione delle infrastrutture urbanistiche. Oggi soltanto negli Stati Uniti esistono oltre 700 milioni di parcheggi dedicati, per una superficie quadrata equivalente a tutto lo stato del Connecticut. In media un’auto viene usata solo per il 4% del tempo, mentre secondo alcune stime le flotte a guida autonoma raggiungeranno un utilizzo vicino al 75%. 5 Per queste ragioni, si prevede che tali veicoli costituiranno la dorsale portante delle città intelligenti del futuro. Le aspettative di successo delle soluzioni congiunte di guida autonoma e mobilità condivisa sono associate alla convergenza dei modelli di business dell’e-hailing e del car sharing. Secondo il report pubblicato da Allied Market Research, le stime per il mercato globale dei veicoli autonomi erano pari a 54,23 miliardi di dollari nel 2019 e si prevede che raggiungano i 556,67 miliardi entro il 2026, con un tasso annuo di crescita composto (CAGR) del 39,47% dal 2019 al 2026. 6 Le funzionalità HAD (Highly Autonomous Driving) e di guida semiautonoma nei sistemi ADAS (Advanced Driver Assistance Systems) richiedono una piattaforma di elaborazione e rilevamento in corrispondenza del core e dell’edge di rete. Le soluzioni di archiviazione e storage a elevate prestazioni di HPE migliorano ulteriormente un’affidabile distribuzione, che protegge i dati e li prepara per l’analisi. Per molte soluzioni HAD potrebbero essere necessari modelli di consumo con pagamento basato sull’uso, esattamente ciò che offre la flessibilità di HPE GreenLake, che semplifica l’infrastruttura IT garantendo nel contempo privacy e controllo. 1 “Connected cars report: 125 million vehicles by 2022, 5G coming”, Internet of Business, 2018 2 “The true cost of autonomous cars”, Axios, 2018 3 “Government study confirms ABS effectiveness, but mysteries linger”, Consumer Reports News, 2009 4 “Road traffic injuries”, Organizzazione mondiale della sanità, 2018 5 “How self-driving cars will help solve America’s parking problem”, Axios, 2018 6 “Global Autonomous Vehicle Market is Expected to Reach $556.67 Billion by 2026”, Allied Market Research, 2019
White paper tecnico Pagina 4
Questo white paper delineerà l’ambito del problema HAD, con un’analisi dei principali elementi costitutivi e componenti di un veicolo a guida
autonoma:
• Nella Sezione 2 saranno descritti i tradizionali livelli di automazione dei veicoli (da 0 a 5).
• Nella Sezione 3 si parlerà della natura, quantità e portata dei dati associati a un veicolo HAD.
• La Sezione 4 illustra il percorso end-to-end per una tipica soluzione HAD di livello 3 e 4.
• Nella Sezione 5 vengono presentati gli HPE Pointnext Services e le partnership attinenti a una distribuzione HAD.
1.1. Ambito del problema
Rilevamento Comprensione Rilevamento degli oggetti
Percezione Decisione Azione
FIGURA 1. Principali elementi costitutivi nello sviluppo di un’auto a guida autonoma
1. Rilevamento: i sistemi HAD si basano sulla tecnologia dei sensori integrati sui veicoli. I sensori più importanti sono GPS/unità di misura
inerziale (IMU), videocamere, LIDAR, radar, ultrasuoni e altri sensori presenti negli interni e negli organi di trasmissione. Alcune tecnologie sono
già consolidate (ad esempio GPS e videocamere), mentre altre come LIDAR oggi risultano ancora costose, ma si prevede che i prezzi e le
dimensioni si riducano con la maturazione del mercato HAD. Questo primo elemento costitutivo implica l’integrazione dell’intera gamma di
input dei sensori dell’auto per creare una descrizione ad alto contenuto di dati dell’ambiente circostante.
2. Comprensione: i modelli di machine learning sull’auto (edge) e nei data center connessi (core) eseguono simulazioni per associare i dati dei
sensori a scenari noti e pre-elaborati (ad esempio una strada congestionata in una giornata di pioggia o un parcheggio di notte). Il processo
decisionale del veicolo si baserà in parte sui modelli di riferimento usati per comprendere le condizioni dell’ambiente circostante e garantire la
sicurezza. Con l’arrivo di nuovi dati, il veicolo deve anche essere in grado di eseguire correlazioni incrociate tra le informazioni e considerare
attendibili i flussi da cui queste hanno avuto origine.
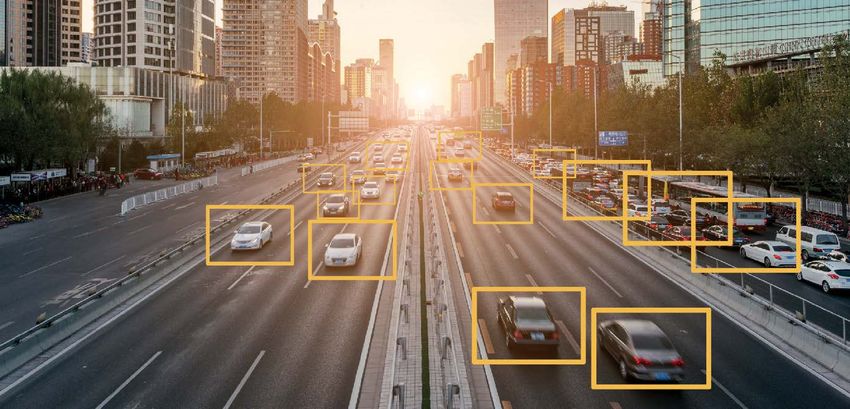
3. Rilevamento degli oggetti: nella fase di rilevamento vengono distinti altri veicoli, corsie stradali, segnaletica, pedoni, percorsi automobilistici e
così via. L’obiettivo è rilevare gli oggetti nell’ambiente e dedurre il contesto, sia in aree fino a quel momento non definite, sia su mappe ad alta
definizione. Il rilevamento della segnaletica stradale è ovviamente essenziale, come la comunicazione tra il veicolo e l’infrastruttura o gli altri
veicoli (V2X).
4. Percezione: la percezione implica l’esecuzione di modelli rispetto ai nuovi dati per scoprire gli oggetti e la loro relazione con l’ambiente più
esteso. I componenti di questo blocco sono localizzazione (dov’è l’auto?), contestualizzazione (qual è l’ambiente, individuato magari tramite
mappe ad alta definizione?), riconoscimento degli oggetti (con l’integrazione dei dati LIDAR e di altri sensori) e monitoraggio degli oggetti
(attraverso modelli intelligenti).
5. Decisione: con decisione si intende la preparazione all’azione. Qual è il successivo comportamento dell’auto? Deve svoltare, frenare o
procedere in avanti? L’unità di elaborazione primaria del veicolo prende le decisioni sulla base dei dati generati dai sensori situati nel contesto
ambientale in cui si trova l’auto. I modelli vengono addestrati tramite machine learning e alimentati dai grandi quantitativi di dati acquisiti dalla
suite di sensori. In questo modo si creano algoritmi utilizzabili per ricavare potenziali risultati fondati sui feed live delle informazioni contestuali.
Da qui è possibile applicare la logica per determinare le successive azioni desiderate. L’obiettivo principale è una strategia di guida, che include
capacità di evitare gli ostacoli, pianificazione del comportamento, controllo GPS, pianificazione del percorso e previsione di eventi non rilevati.
6. Azione: una volta presa una decisione su quale azione eseguire successivamente, il veicolo deve implementarla il più rapidamente possibile.
Qui è necessaria la software intelligence, poiché è essenziale comprendere il corretto ambito di azione nel contesto. Nel caso di una soleggiata
giornata estiva con strade asciutte, la condizione che prevede una svolta dell’auto a sinistra è naturalmente molto diversa rispetto a una
giornata invernale con strade scivolose. Le case automobilistiche hanno già iniziato ad affrontare il problema sfruttando le funzionalità di
assistenza al cambio di corsia (LCA, Lane Change Assist) o di cruise control adattivo (ACC, Adaptive Cruise Control) dei veicoli. Tuttavia la
corretta ottimizzazione automatica di un sistema di controllo presente su un’auto in base all’ambiente circostante è ancora problematica.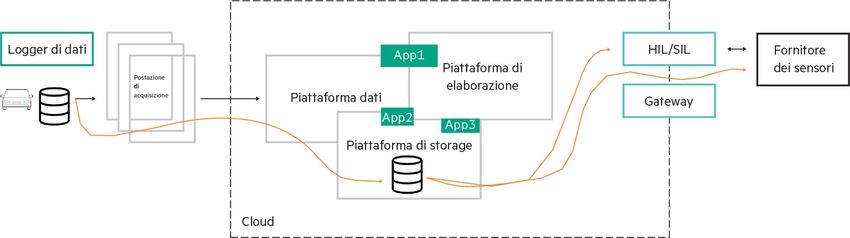
White paper tecnico Pagina 5
Tenendo conto degli elementi costitutivi indicati sopra, consideriamo i componenti chiave di un sistema HAD. I dati dei sensori vengono
solitamente raccolti in contenitori di misurazione posti nel bagagliaio delle autovetture (vedere la sezione “Acquisizione, trasformazione e
analisi dei dati”). Le prime difficoltà relative ai test su sistemi HAD sono lo scaricamento dei dati e la loro archiviazione in una postazione di
acquisizione (chiamata anche postazione di carico o buffer). In genere il principale archivio dati è una soluzione di cloud ibrido con la
maggior parte dei componenti nel data center e la possibilità di utilizzare il cloud in caso di picco.
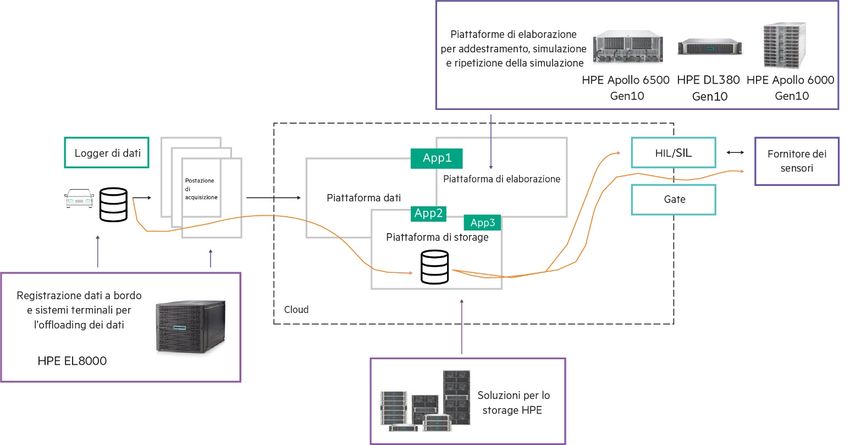
FIGURA 2. Vista dettagliata dei componenti di sviluppo di un sistema HAD end-to-end
In base alla complessità dell’auto e al livello di simulazione utilizzato, i test per lo sviluppo di soluzioni HAD implicano normalmente tre
passaggi:
• Con le prove MIL (Model-in-the-loop) vengono testati il modello e l’ambiente operativo del sistema HAD, escludendo i componenti
hardware (l’esecuzione avviene di solito su workstation generiche). Le prove MIL sono effettuate generalmente nelle prime fasi del ciclo
di sviluppo.
• Con le prove SIL (Software-in-the-loop) viene testato e convalidato il codice autogenerato impiegato nel controller del sistema. I test
SIL avvengono spesso in un ambiente simulato, ancora senza hardware del sistema HAD.
• Con le prove HIL (Hardware-in-the-loop) viene testato e convalidato l’hardware del sistema HAD, allo scopo di rilevare potenziali
guasti causati dal compilatore di destinazione o dall’architettura hardware.
Esistono vari modi in cui gestire i dati raccolti dai diversi sensori. I dati video possono essere archiviati insieme a quelli della trasmissione o alle
informazioni LiDAR. I file dati vengono memorizzati nella piattaforma back-end e usati per l’elaborazione basata su IA e per le prove HIL/SIL
(Hardware e Software-in-the-loop), nonché per le attività di test e ottimizzazione dei sensori esterni dei veicoli svolte dagli sviluppatori.
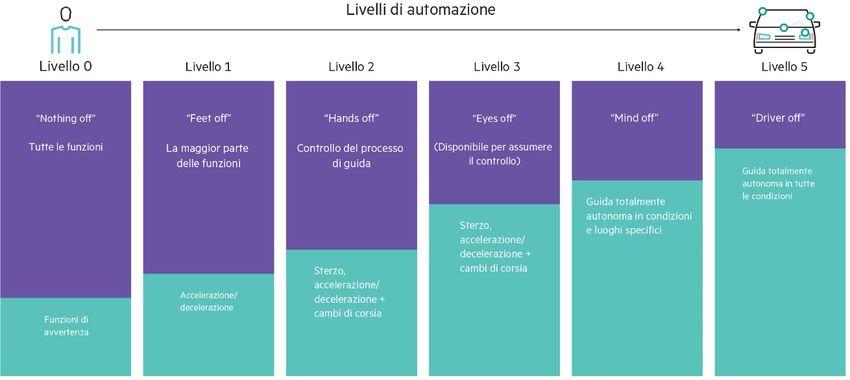
FIGURE 3. Classificazione dei livelli di automazione HAD, definiti dalla Society of Automotive Engineers (SAE) 7
7
“Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles”, J3016_201806, SAE International, 2018White paper tecnico Pagina 6 2. LIVELLI DI AUTOMAZIONE Secondo la SAE, che ha ricevuto l’approvazione dell’NHTSA (National Highway Traffic Safety Administration), l’automazione dei veicoli si misura in una scala a sei livelli, dal livello 0 al livello 5: • Livello 0: nessuna automazione: il conducente umano si deve occupare della guida in ogni momento. L’autovettura può essere dotata di sistemi di avviso, ma la guida dinamica è svolta totalmente dall’uomo. • Livello 1: assistenza alla guida: il veicolo è in grado di effettuare azioni specifiche, come accelerare o decelerare servendosi di informazioni ottenute dall’ambiente. Tuttavia il controllo e la guida dinamica sono di responsabilità del conducente. • Livello 2: automazione parziale: il veicolo è in grado di sterzare (per il cambiamento di corsia) e accelerare/decelerare. Tutti gli altri aspetti della guida dinamica rimangono sotto il controllo costante del conducente umano. • Livello 3: automazione condizionata: il veicolo gestisce tutti gli aspetti della guida dinamica, anche se il conducente può intervenire quando necessario. • Livello 4: elevata automazione: il veicolo gestisce tutti gli aspetti della guida dinamica ed in grado di prendere decisioni anche se il conducente non risponde alle richieste di intervento. Questo è tuttavia possibile solo in determinati scenari, come il ride sharing cittadino o in aree che presentano un eccellente livello di mappatura. • Livello 5: automazione completa: il veicolo si occupa totalmente della guida dinamica in tutte le condizioni stradali e ambientali in cui oggi può operare un conducente umano. Recenti investimenti e acquisizioni hanno evidenziato l’interesse del settore nel perseguire lo sviluppo dei sistemi HAD, con l’obiettivo di raggiungere l’automazione di livello 5. Per citare un limitato ma significativo numero di esempi dell’attività in questo settore molto dinamico, possiamo ricordare che Ford ha investito 1 miliardo di dollari in Argo AI, 8 GM ha investito in Lyft e acquisito Cruise Automation, 9 Volvo ha sviluppato una joint venture con Uber, 10 Uber ha acquistato Otto, 11 Intel® ha investito 15,3 miliardi di dollari per l’acquisizione di Mobileye, 12 Hyundai e Toyota hanno annunciato i rispettivi investimenti in ricerca e sviluppo (R&D) per soluzioni HAD. Alcuni OEM stanno pensando ad auto a guida autonoma come proposte as-a-service e prevedono che possano generare ricavi significativi. I veicoli di livello 3 costituiranno il punto di svolta per i test sulla tecnologia, aprendo la strada all’adozione di massa delle soluzioni HAD all’interno del mercato. Mentre si intensifica la corsa per raggiungere il livello 5, oggi la maggior parte delle principali case automobilistiche sta sviluppando un programma per veicoli a guida autonoma, oppure collabora con un’altra realtà che si occupa di tale sviluppo. Ogni OEM segue un approccio diverso. Waymo (una società Alphabet/Google™) ha annunciato di essere interessata soltanto al livello 5, mentre altre aziende come Uber e Ford si stanno preparando per il livello 4. 13 Daimler, insieme a Bosch, ha dichiarato 14 che si dedicherà ai livelli 4 e 5, cercando di trasformarli in realtà entro l’inizio del prossimo decennio. Altri produttori hanno scelto un percorso progressivo, che prevede il passaggio attraverso i vari livelli di automazione durante la maturazione della tecnologia HAD. 3. ACQUISIZIONE, TRASFORMAZIONE E ANALISI DEI DATI Riunendo gli elementi costitutivi dell’infrastruttura HAD si determinano complesse pipeline di dati dal veicolo al back-end e viceversa. Durante la realizzazione di un nuovo veicolo HAD, le videocamere all’edge (sull’auto), LiDAR e altri sensori generano grandi quantitativi di informazioni, mentre il data center addestra i modelli basati su IA e li ottimizza per le decisioni in tempo reale in fase di guida. Il flusso di dati medio di un sensore è pari a circa 33 gb/s, il che significa approssimativamente 120 TB per un test drive di 8 ore. Sebbene la tecnologia sia ancora in fase di sviluppo, queste informazioni devono essere archiviate nella loro totalità per il rispetto delle norme giuridiche. Con la raccolta dei dati associati a un test drive di una giornata su 80 veicoli si arriva a 10 PB di dati grezzi, per cui è presumibile che una piccola flotta di autovetture generi tra i 100 e i 500 PB al giorno. 3.1 Principi chiave Oltre a fornire un file system flessibile, scalabile e a elevate prestazioni, l’ambiente R&D dedicato alla tecnologia HAD deve supportare attività simultanee di sviluppo, simulazione e test per più operatori e team dedicati. Per rispondere alle diverse esigenze dei tecnici, HPE può mettere a disposizione ambienti di sviluppo paragonabili al cloud il più vicino possibile alle informazioni, sia nel core sia all’edge. 8 “Ford invests $1 billion in Pittsburgh-based Argo AI to build self-driving cars by 2021”, TechCrunch, 2017 9 “GM invests $500 million in Lyft, sets out self-driving car partnership”, Reuters, 2016; “GM buys Cruise Automation to speed self-driving car strategy”, Reuters, 2016 10 “Volvo Cars and Uber present production vehicle ready for self-driving” comunicati stampa di Volvo Cars, 2019 11 “Uber buys self-driving truck startup Otto; teams with Volvo”, Reuters 2016 12 “Intel buys Mobileye in $15.3B deal, moves its automotive unit to Israel”, TechCrunch, 2017 13 “Ford aims for self-driving car with no gas pedal, no steering wheel in 5 years, CEO says“, CNBC LLC, 2017 14 Future mobility. Bosch and Daimler join forces to work on fully automated, driverless system
White paper tecnico Pagina 7 In questi ambienti, è essenziale ridurre al minimo i movimenti dei dati e portare la potenza di elaborazione verso questi ultimi, nonché consentire una rapida pianificazione delle risorse di elaborazione e accelerazione condivise al fine di massimizzare l’utilizzo. Possono risultare utili soluzioni Platform-as-a-Service e Software-as-a-Service, nonché container velocemente configurabili per l’esecuzione di un particolare processo. Sono disponibili strumenti per creare pipeline CI/CD (Continuous Integration/Continuous Development) che permettono test agili ed efficienti e supportano lo sviluppo di algoritmi. 4. IL PERCORSO END-TO-END DEI SISTEMI HAD I sistemi HAD di livello 3 e 4 richiedono tecnologie IT innovative. Come uno dei fornitori leader in tutto il mondo di tecnologia HPC, HPE alimenta le soluzioni più performanti per clienti che devono affrontare le più complesse problematiche di elaborazione odierne. L’obiettivo finale (il livello 5) che, secondo le previsioni, dovrebbe essere raggiunto tramite le tecnologie di guida autonoma è un modello di car sharing diffuso, in cui gli automobilisti non sono più conducenti e anzi potrebbero essere del tutto assenti per una porzione del tragitto. Nel frattempo, i veicoli stabiliranno una comunicazione reciproca fornendo costanti informazioni sulle loro intenzioni e sull’avanzamento, attraverso l’utilizzo di tecnologie wireless come Wi-Fi e 5G. Finché non si raggiungerà tale livello di automazione, la guida e i test di livello 3 e 4 richiederanno ancora un framework affidabile per la raccolta, l’acquisizione, la trasformazione, la conservazione e il consumo dei dati. In questa infrastruttura, le informazioni vengono trasmesse tramite sensori nel logger dei dati dell’auto e successivamente, attraverso il sistema di storage a bordo, passano alla postazione di acquisizione. Da qui, vengono inserite nel data lake dove sono trasformate e preparate per l’analisi e l’utilizzo. Per il flusso di dati è fondamentale il data lake, che archivia tutte le informazioni raccolte dai veicoli nonché gli output generati dalle attività del sistema. Vedere le figure 4 e 5 per le diverse fasi del flusso di lavoro dei dati forniti da un data lake. FIGURA 4. Flusso di dati di un sistema HAD
White paper tecnico Pagina 8 FIGURA 5. Vista dettagliata dei componenti di sviluppo di un sistema HAD 4.1 Registrazione dei dati L’apparecchiatura a bordo dei veicoli di test raccoglie e archivia i dati provenienti dai sensori, con velocità che superano i 30 gb/s. Ad esempio, una flotta operativa di 80 veicoli che raccoglie 18 TB di informazioni per ogni turno di 8 ore a una velocità In-Vehicle di 5 gb/s genera 1,44 PB di dati grezzi per turno. Per la stessa flotta che raccoglie informazioni a una velocità In-Vehicle di 30 gb/s, i dati generati per turno aumentano a 8,64 PB. Per velocità dati così elevate, è consigliato il sistema edge convergente HPE Edgeline EL8000, una piattaforma convergente e modulare che combina connettività per sensori, risorse di elaborazione e storage. HPE EL8000 è un sistema rinforzato, gestibile da remoto, un logger di dati che rappresenta un’estensione integrata del data center. HPE EL8000 è una piattaforma di elaborazione convergente In-Vehicle particolarmente adatta per le fasi di test e sviluppo, visto che può acquisire decine di gigabit al secondo dei flussi dati LiDAR, radar e video. Il PCIe HPE EL8000 collega l’I/O direttamente al processore, ottenendo l’accesso diretto al distributore all’interno della CPU. Così il routing dei dati da e verso la memoria, nonché per la cache del processore e altri dispositivi PCIe, è diretto. HPE EL8000 non è semplicemente un’unità di storage, poiché supporta CPU x86 a 64 bit e acceleratori di elaborazione specializzati come GPU e FPGA. In tal senso, HPE EL8000 rappresenta il primo passo della pipeline di trasformazione dei dati: è in grado di ridurre significativamente uno dei colli di bottiglia del flusso dati, garantendo l’assegnazione automatica e on-the-fly dei tag dei contenuti e limitando la quantità di pre-elaborazione necessaria. 4.2 Acquisizione dei dati Esistono due diverse opzioni per l’offloading dei dati: • Sostituzione dei supporti fisici: HPE EL8000 possiede due unità hot-swap che possono essere caricate e rimosse dal sistema In-Vehicle. I supporti sono basati su unità SSD per minimizzare il rischio di perdita dei dati dovuta a movimentazione e trasporto. I supporti ricevuti dal centro remoto vengono caricati e trasferiti al data center tramite un’infrastruttura LAN ad alta velocità. • Offloading su LAN ad alta velocità verso postazioni di acquisizione o data center: questo approccio prevede l’offloading su LAN dal dispositivo In-Vehicle alla postazione di acquisizione. Le postazioni di acquisizione si trovano nei data center dove vengono usate reti LAN ad alta velocità per collegare i veicoli all’infrastruttura data center. Una volta connessi, i veicoli effettuano l’offloading dei dati attraverso uplink da 100 Gb verso la destinazione specificata. • Con la prevista introduzione del 5G, HPE EL8000 potrà caricare i dati, o porzioni rappresentative di essi, durante la guida, qualora il logger sia dotato di scheda 5G. Potrebbe essere adottata anche un’altra postazione di acquisizione per il buffer dei dati provenienti direttamente dall’auto di sviluppo, in modo da rimetterla in strada il prima possibile.
White paper tecnico Pagina 9
Oltre a supportare il buffer dei caricamenti, la postazione di acquisizione è anche il primo punto di valutazione delle informazioni. In
qualsiasi test drive, è probabile che la maggior parte dei dati sia priva di eventi significativi e fornirà un valore immediato inferiore al
processo di sviluppo. Tuttavia, alcuni eventi avranno un valore più alto per gli sviluppatori; in questi casi i caricamenti prioritari vengono
gestisti in corrispondenza della postazione di acquisizione, liberando l’auto in tempi più rapidi e offrendo subito agli sviluppatori i dati più
importanti. I tecnici potrebbero decidere di definire in modo diverso le priorità, scelta che richiederebbe una capacità di elaborazione
maggiore rispetto a quella offerta da HPE EL8000.
FIGURA 6. File system diversi in base a prestazioni e scalabilità
4.3 Data lake
La principale problematica per stabilire la tecnologia di storage da adottare in relazione a questo flusso di lavoro è la scalabilità che può
garantire. Nella figura 6, si possono trovare le varie opzioni di file system, ognuna con un diverso livello di scalabilità o prestazioni.
I file system paralleli come Lustre consentono la scalabilità lineare di una soluzione. Lustre è stato progettato per configurare elementi
costitutivi di determinate dimensioni e prestazioni, con la possibilità di aggiungerne altri in modo flessibile. Esistono poche soluzioni sul
mercato che hanno dimostrato pari livelli di prestazioni, capacità e scalabilità.
I file system paralleli forniscono inoltre connettori e supporto per i tradizionali file system POSIX, nonché connettori Hadoop per i comuni
ambienti Big Data.
Alcuni clienti utilizzano altri ambienti distribuiti a scalabilità orizzontale come HDFS (Hadoop Distributed File System), Ceph o addirittura
prodotti di storage conformi a S3. Ad esempio, HDFS è progettato per l’esecuzione su hardware standard e per una scalabilità orizzontale
semplificata. HDFS definisce anche i tier di storage in base alle temperature dei dati. I dati attivi (hot) a cui è necessario accedere
velocemente sono collocati sulle unità più veloci, mentre quelli a temperatura inferiore vengono gestiti da unità con velocità minori. Questo
approccio consente la realizzazione di un data lake a costi contenuti sulla base dell'importanza e delle esigenze dei dati.
4.4 Tecniche SIL (Software-in the-loop) e HIL (Hardware-in the-loop)
In un report pubblicato nel 2016, 15 la RAND Corporation calcolava che, per ridurre gli incidenti mortali sulle strade del 20%, i veicoli a guida
autonoma devono percorrere circa 11 miliardi di miglia. Con una flotta di 100 auto, utilizzate 24 ore su 24, 365 giorni all’anno a una
velocità media di 25 miglia orarie, sarebbero necessari 518 anni per raggiungere questo obiettivo. Chiaramente serve un’alternativa.
Per vincere questa sfida, oggi le aziende che si occupano di guida autonoma si servono di tecniche e modelli SIL e/o HIL per accelerare i
test.
Per rispondere alle esigenze delle aziende del settore automotive di tutto il mondo, HPE ha sviluppato sistemi di simulazione generalmente
dotati dello chassis HPE Apollo 2000 Gen10 configurato con HPE XL170r per la porzione di elaborazione della CPU e HPE XL190r per la
GPU.
I flussi di lavoro SIL personalizzati si fondano su un sistema CMS (Control and Management System) che supporta eventi pianificati in base
al tempo nonché code di elaborazione la cui esecuzione avverrà in parallelo secondo la disponibilità delle risorse.
I sistemi SIL collocati insieme allo storage garantiscono maggior flessibilità per soddisfare i requisiti di larghezza di banda necessari per
operazioni SIL ottimali. L’accesso ai sistemi SIL può avvenire a livello globale, assicurando così il supporto ai tecnici di diverse aree
geografiche.
15
“Driving to Safety”, RAND Corporation, 2016White paper tecnico Pagina 10
Anche le soluzioni HIL (Hardware-in-the-loop) possono essere integrate nel fabric di data center principale per offrire un rapido accesso
al data lake. Visti gli elevati livelli di prestazioni richiesti, per una configurazione HAD sono preferibili i fabric di interconnessione ad alta
velocità come InfiniBand o Intel Omni-Path, con tecnologia 10 GbE secondaria disponibile per connettività globale e per soluzioni HIL
personalizzate.
4.5 Archiviazione/backup
La realizzazione di un sistema HAD può richiedere un ampio numero di veicoli di test, ognuno dei quali genera terabyte di dati ogni giorno;
come si può facilmente intuire, una flotta estesa può rapidamente arrivare centinaia di petabyte. Nel contempo, una volta acquisite, le
informazioni devono essere ripulite, separate e trasformate, con la creazione di versioni diverse delle stesse (in formati diversi).
In base alle normative e alle policy di conformità specifiche di un’azienda, potrebbero essere necessarie anche opzioni di archiviazione e
backup. Per la conservazione dei dati a lungo termine, HPE propone DMF (Data Management Framework), un prodotto di gestione dello
storage gerarchico con oltre 20 anni di implementazioni di successo.
HPE DMF monitora automaticamente lo spazio disponibile su un file system gestito, verificando che vi sia sempre una quantità di spazio
sufficiente, per sollevare gli amministratori di sistema dal lungo e ripetitivo processo di monitoraggio e provisioning dello storage.
HPE DMF conserva le informazioni dei metadati e i file dati dalle precedenti versioni dei file, così gli amministratori possono contare su una
cronologia completa dell’evoluzione e dei contenuti dei file system, per tornare indietro e ripristinarli in modo parziale o totale. Durante la
fase di ripristino dei file system o di porzioni di essi, gli amministratori possono utilizzare la designazione point-in-time.
La base di una soluzione HPE DMF a nastro è costituita dalla libreria su nastro HPE TFinity® ExaScale, fondata sulla tecnologia Spectra.
TFinity ExaScale è il sistema di archiviazione a singolo ingombro più grande del mondo: 16 un solo sistema TFinity EE è in grado di
archiviare fino a 53.450 cartucce di nastro su 44 frame. Con la tecnologia per supporti compressi TS1150, la capacità supererà 1 exabyte.
Grazie alla doppia robotica 17 e alle 72 unità LTO-8, la soluzione può arrivare a velocità di scrittura pari a 21 GB/s, con una capacità di
100,2 PB tramite 8350 cartucce LTO-8 (quattro RIM).
5. SERVIZI E PARTNERSHIP
HPE, leader mondiale in termini di quota di mercato nel settore HPC, è in grado di soddisfare le elevate esigenze di elaborazione, storage e
rete di una soluzione HAD. Meno conosciuti sono i servizi offerti da HPE per la realizzazione di ambienti HPC e, in ultimo, per il supporto
della base di clienti e utenti a livello globale.
5.1 Realizzazione
La divisione HPE Pointnext Services crea la piattaforma per i clienti dal data center all’edge (in questo caso postazioni di acquisizione e
logger dei dati delle auto), fino alle applicazioni pronte per l’utilizzo da parte degli sviluppatori. Secondo le esigenze e gli obiettivi del
cliente, gli esperti di HPE Pointnext Services che si occupano di IA e dati possono consentire agli utenti di:
• valutare obiettivi e priorità dei casi d’uso per gli stakeholder in ambito aziendale, dati e IT
• identificare le funzionalità di IA e analisi per raggiungere gli obiettivi dei soggetti interessati
• scoprire le dipendenze e le origini dati per sviluppare una strategia di gestione dati intelligente
5.2 Esecuzione
Una volta realizzata, la piattaforma può passare alla fase di produzione. L’esecuzione in produzione implica il corretto livello di supporto
operativo per tutti i componenti, con la garanzia di una disponibilità ottimale a sostegno del business. Attraverso i servizi di supporto
operativo di HPE Pointnext Services, HPE può dedicarsi agli aspetti funzionali di un sistema HAD.
Gli HPE Adaptive Management Services sono un componente integrato delle soluzioni HPE GreenLake, che forniscono risultati IT secondo
un modello pay-per-use. Questo framework affronta le problematiche della fase operativa dei servizi all’interno dell’infrastruttura di
un’azienda, in relazione a server, storage, rete, software di infrastruttura, hypervisor, backup/ripristino e sicurezza, nonché middleware e
applicazioni per asset HPE e di terze parti selezionate.
16
spectralogic.com/products/tfinity-exascale/overview/
17
“TFinity® ExaScale Edition Architectural Guide”, Spectra Logic Corporation, 2016White paper tecnico Pagina 11
5.3 Utilizzo
Combina la flessibilità del cloud pubblico on-premise e tieni sotto controllo l’ambiente con HPE GreenLake, un set di soluzioni IT basate sul
consumo. Il catalogo include soluzioni complete ed esclusive che offrono risultati IT con hardware, software e competenze on-premise
grazie a un modello pay-per-use.
5.4 Partner
Nel percorso HAD possono verificarsi situazioni in cui per HPE è utile collaborare non soltanto con il cliente finale ma anche con altre
organizzazioni per offrire la miglior piattaforma e il miglior servizio. La fornitura di dati per prove in test drive remoti rappresenta un
potenziale esempio di tale partnership. La larghezza di banda disponibile presso la sede di un test drive potrebbe rendere di fatto
impossibile il caricamento dei dati; collaborando con un servizio di corriere, possiamo garantire che i dati siano consegnati il prima possibile
al punto di acquisizione più vicino.
Le partnership assumono anche altre forme. Magari il cliente possiede già un service provider IT e desidera che la piattaforma HAD sia
eseguita nello stesso ambiente. Seguendo le richieste dei clienti, HPE può collaborare con questi service provider per verificare che la
transizione dalla realizzazione all'esecuzione avvenga nel modo più fluido possibile e senza difficoltà. Attraverso la collaborazione con i
service provider, HPE può fare in modo che i servizi di realizzazione ed esecuzione per il cliente finale siano una combinazione tra HPE ed
altri. Ciascun partner apporta i propri servizi all’ecosistema e propone una soluzione end-to-end per il cliente.
6. CONCLUSIONE
Ogni anno muoiono circa 1,35 milioni di persone a seguito di incidenti stradali, il cui costo per la maggior parte dei paesi è pari al 3% del
loro PIL. È compreso tra 20 e i 50 milioni il numero di coloro che subiscono infortuni non fatali, la cui conseguenza in molti casi è però una
disabilità fisica. 18
Le soluzioni HAD (Highly Autonomous Driving) sono un mercato in rapida crescita, con l'obiettivo di migliorare la salute e la sicurezza
pubblica. È stato stimato che, con tassi di penetrazione dei veicoli a guida autonoma del 10%, 50% e 90%, le vite salvate ogni anno negli
Stati Uniti potrebbero essere rispettivamente 1.100, 9.600 e 21.700. 19
Tuttavia l’HAD è una sfida complessa, poiché richiede alcune delle più avanzate e sofisticate tecnologie oggi disponibili sul mercato, tra cui
reti neurali basate su machine learning e deep learning, elaborazione accelerata d’avanguardia, reti a elevata larghezza di banda e fabric
interconnessi.
HPE risponde alle esigenze del settore automotive con un portafoglio completo di soluzioni HPC e IA capaci di supportare distribuzioni
HAD dall’edge al
cloud; i clienti possono acquistarle e utilizzarle autonomamente oppure sottoscrivere un contratto con HPE (tramite HPE Pointnext
Services,
HPE GreenLake e altre offerte di servizi) affinché gestisca per loro gli ambienti HAD, in modo parziale o totale. Il portafoglio HPE di sistemi
di elaborazione, storage e rete dalle massime prestazioni, insieme ai servizi e al supporto a livello globale, consente agli sviluppatori di
creare oggi le soluzioni
HAD ottimali per le affidabili e sicure reti di trasporto di domani.
ULTERIORI INFORMAZIONI ALLA PAGINA
hpe.com/ai
Seguici
Facebook: facebook.com/HPEAI/
Twitter: IA HPE - @IA_HPE
LinkedIn: linkedin.com/showcase/hpe-ai/
18
“Road traffic injuries”, Organizzazione mondiale della sanità, 2018
19
Commissione europea, Autonomous Vehicles & Traffic Safety, Commissione europea, Direzione generale dei trasporti, febbraio 2018White paper tecnico
Check if the document is available
in the language of your choice.
Prendi la decisione d’acquisto giusta.
Contatta i nostri specialisti della
prevendita.
Condividi ora
Ricevi aggiornamenti
© Copyright 2020 Hewlett Packard Enterprise Development LP. Le informazioni contenute nel presente documento sono
soggette a modifica senza preavviso. Le uniche garanzie relative ai prodotti e servizi Hewlett Packard Enterprise sono quelle
espressamente indicate nelle dichiarazioni di garanzia che accompagnano tali prodotti e servizi. Nessuna affermazione
contenuta nel presente documento può essere ritenuta come garanzia aggiuntiva. Hewlett Packard Enterprise declina ogni
responsabilità per eventuali omissioni o errori tecnici o editoriali contenuti nel presente documento.
Google è un marchio di Google LLC. Intel è un marchio di Intel Corporation negli Stati Uniti e in altri paesi. Tutti i marchi di terzi
sono di proprietà dei rispettivi titolari.
a00091772ITE, ottobre 2020Puoi anche leggere