N 2057 BIOINGEGNERIA DELL'ESERCIZIO FISICO E DELLO SPORT TEORIA ESERCIZI TEMI ESAME - 2017-18 DI FRANCIA SABRINA - Appunti Universitari Online
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 1 di 134
Centro Stampa
ATTENZIONE QUESTI APPUNTI SONO OPERA DI STUDENTI , NON SONO STATI VISIONATI
DAL DOCENTE. IL NOME DEL PROFESSORE, SERVE SOLO PER IDENTIFICARE IL CORSO.
N° 2057
BIOINGEGNERIA DELL'ESERCIZIO FISICO
E DELLO SPORT
TEORIA ESERCIZI TEMI ESAME
2017-18
DI FRANCIA SABRINA
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 1 di 134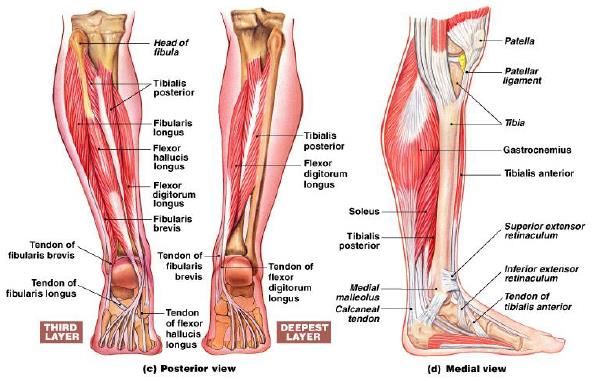
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 2 di 134
9 ottobre 2017
La prima cosa da fare per risolvere un problema di biomeccanica è identificare e disegnare un diagramma di
corpo libero che richiede due competenze: capire qual è il sistema che dobbiamo analizzare (a quali corpi si
estende l’analisi da modellizzare attraverso il diagramma) e quali sono le forze significative che entrano in
gioco nell’esercizio specifico che andiamo a studiare (in alcuni casi la forza resistente dell’aria è da inserire
mentre a volte è trascurabile).
Un diagramma di corpo libero si disegna come un insieme di segmenti collegati tra loro e indicando le forze
che agiscono su questi. Quello che rappresentiamo nel diagramma attraverso i segmenti è l’oggetto di
analisi.
A livello di diagramma di corpo libero è importante andare a rappresentare solo ed esclusivamente le forze
che agiscono all’esterno del sistema mentre quelle che agiscono internamente non vanno rappresentate.
Questo ha conseguenze importanti: la più evidente è che se, per esempio, vogliamo studiare la forza
muscolare del quadricipite che agisce sull’articolazione di ginocchio, come sistema da analizzare non
possiamo considerare il corpo nel complesso dell’atleta perché la forza del quadricipite sarebbe interna e
non potremmo né rappresentarla né risolverla; per risolverlo dovremmo considerare come
sistema di analisi un sottosistema.
Si disegnano più segmenti solo per comprendere meglio l’oggetto che si sta studiando ma,
essendo tutti i segmenti rigidi gli uni rispetto agli altri, potremmo disegnarne uno unico.
A noi interessa stimare la forza muscolare quindi dobbiamo identificare meglio il sistema. Il
sistema che andiamo a considerare si identifica sulla base della forza che si vuole misurare o
calcolare.
Per fare in modo che la forza sia esterna dobbiamo tagliare il sistema in corrispondenza dell’articolazione: il
modo più semplice è considerare solo i segmenti gamba + piede perché a questo punto il sistema si
interfaccerebbe con un sistema esterno (muscolo e segmento coscia) e il muscolo genererebbe una forza
applicata al segmento gamba tramite un tendine. La forza di estensione generata dal muscolo diventa
esterna perché il motore è diventato un elemento esterno al sistema gamba + piede.
Valutazione della reazione vincolare durante la corsa
La forza di reazione del terreno è la forza che interagisce tra il piede e il piano di appoggio. Vogliamo
calcolare modulo e direzione di tale forza. La prima cosa da fare è disegnare il diagramma di corpo libero.
La forza di reazione vincolare deve essere una forza esterna al sistema
considerato quindi non possiamo considerare il sistema terra e corridore
(caso estremizzato) come sistema di analisi in quanto in tal caso la forza di
reazione sarebbe interna. Possiamo però considerare il corridore nel suo
complesso e andare a sfruttare tutte le conoscenze riguardo alle forze che
andiamo ad inserire.
Oltre alla forza di reazione vincolare Fg (reagisce al peso del soggetto e alle coppie generate alle varie
articolazioni) che ha verso entrante e direzione non necessariamente perpendicolare al terreno (ci poniamo
nella situazione più generica, ha una componente orizzontale e una verticale), dobbiamo aggiungere le
forze esterne che agiscono sul sistema stesso. Possiamo disegnare la Fg come un unico vettore con una
certa direzione generica oppure nelle sue due componenti Fgh e Fgv, rispettivamente orizzontale e
verticale. Aggiungiamo la forza peso esterna Fw dovuta alla gravità, la applichiamo nel centro di massa con
direzione perpendicolare al terreno e verso che va dal centro di massa verso il terreno. Aggiungiamo poi la
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 2 di 134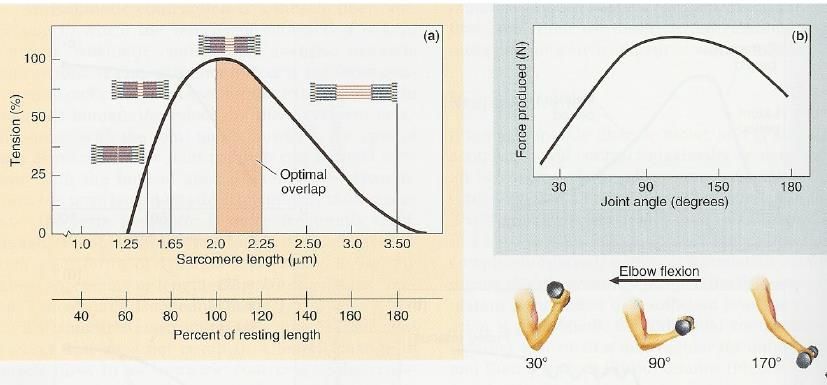
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 3 di 134
resistenza dell’aria Fa che ha verso opposto alla direzione di percorrenza del corridore, è perpendicolare al
piano frontale del corridore ed è applicata al centro di pressione.
Nel caso considerato dobbiamo misurare le forze di interesse mediante delle simulazioni o con degli
strumenti opportuni. La forza peso viene fornita da una qualsiasi bilancia mentre la forza dovuta alla
reazione dell’aria è fornita da tabelle specifiche in funzione della dimensione trasversa del soggetto nel
fluido e della velocità di movimento del fluido stesso (occorre quindi misurare la sezione frontale del
soggetto, ovvero l’area che si espone, e la velocità).
Ci sono più soluzioni possibili per risolvere questo sistema, tutte ugualmente valide; scegliamo quella in
funzione alle grandezze che possiamo misurare.
Supponiamo ora di tagliare il sistema atleta in corrispondenza dell’articolazione dell’anca.
Essendo Fg una forza esterna, il sistema scelto soddisferà il primo requisito
Fm quindi potrà essere utilizzato per la risoluzione.
Fj In questo caso la forza peso Fw non sarà quella del soggetto ma solo del
sistema coscia-gamba-piede e di conseguenza sarà applicata nel centro di
Fw Fa
massa di quest’ultimo. Il valore di questa forza può essere stimato con
tabelle che, in base al peso del soggetto, forniscono una percentuale di
peso per quanto riguarda il sistema coscia-gamba-piede (indicativamente la
Fg
coscia è circa il 20% del peso complessivo, il piede il 3% e la gamba il 15%, la
somma è circa il 48% del peso).
La forza di resistenza dell’aria si applica alla sezione trasversa sul piano frontale dei segmenti coscia-gamba-
piede e la si misura con le stesse difficoltà di quelle che si avevano nel piano complessivo.
Introduciamo poi la forza di reazione vincolare dell’anca Fj: la testa del femore interagisce con il bacino e
per un effetto di azione e reazione abbiamo delle forze tra i due segmenti corporei. Non è affatto facile da
misurare perché è una forza interna al sistema, bisogna usare delle celle di carico e dei sensori di pressione
posti in modo invasivo tra i due segmenti.
La forza di reazione del terreno è determinata dalla forza muscolare (estensori e flessori dell’anca che
agiscono in modo diverso in base alla fase del movimento) che si applica in un certo punto del femore e che
agisce in una direzione non nota a priori ma da stimare e con un modulo non noto e difficilmente
misurabile, anch’esso da stimare. L’unica certezza che abbiamo è il verso uscente dal segmento perché il
muscolo può solo contrarsi.
Siamo più comodi a scegliere il primo modello descritto perché il secondo, nonostante fornisca lo stesso
risultato, introduce due forze in più che risultano solo stimabili e non misurabili. L’obiettivo è avere un
sistema che sia il più semplice possibile per la domanda posta. Il secondo modello proposto può essere
sfruttato quando viene chiesto di stimare forze interne e quindi forze muscolari oppure forze di reazione
vincolare all’articolazione.
In questo caso occorrerebbe tagliare il sistema sull’articolazione in corrispondenza della quale si ha il
muscolo e bisognerebbe determinare l’effetto della forza muscolare sui segmenti, che è duplice: forza
muscolare netta che porta alla generazione della coppia che genera la rotazione tra i due segmenti e forza
di reazione vincolare.
Se fossimo invece interessati ai muscoli estensori della gamba, taglieremmo a livello
dell’articolazione di ginocchio, dove agiscono questi muscoli. Avremmo una forza Fg in
compressione ma in direzione non nota, una reazione vincolare Fj sul ginocchio e la forza dei
muscoli estensori di cui non conosciamo la direzione ma il verso è sicuramente uscente in
quanto questi devono dare una rotazione antioraria.
Infine avremo la forza peso.
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 3 di 134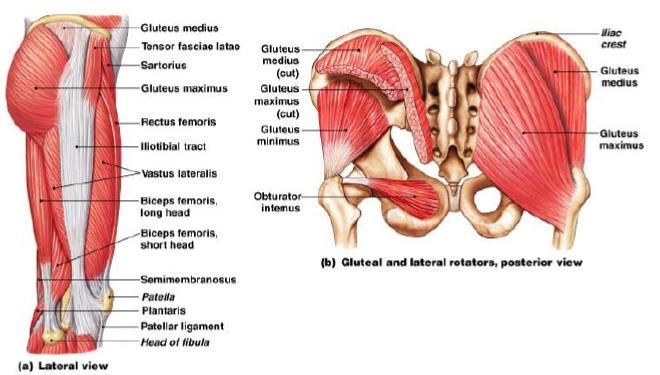
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 4 di 134
Un altro esempio di diagramma è quello in cui tagliamo in corrispondenza del ginocchio e della caviglia
(segmento rigido che permette di calcolare la forza muscolare degli estensori della gamba) ma ci si
complica la vita perché si introducono Fj, Fm, Fw del solo segmento gamba, ma tagliando nell’articolazione
della caviglia avremo un’altra Fj e un’altra Fm di dorsiflessione.
Valutazione delle forze dei muscoli dorsali per sollevare un bilanciere
Anche in questo caso occorre decidere quale sistema considerare e poi aggiungere le diverse forze, tra
queste ultime ci interessano quelle dei muscoli lombari che permettono di alzare il peso. Risulta ottimale
tagliare in corrispondenza dell’articolazione di anca in modo che la forza dei muscoli lombari risulti esterna.
Consideriamo ora il sistema superiore: tronco, testa e braccio. Le forze in gioco sono
il peso del bilanciere che viene applicato alla mano con direzione perpendicolare al
terreno e verso il terreno, la forza peso Fw (di tronco, testa, mani, avambracci e Fm
Fb
braccia) applicata al centro di massa del sistema considerato e con direzione
perpendicolare al terreno e verso il basso, la reazione vincolare all’articolazione Fj
Fj
(evitare di disegnarla in direzioni particolari bensì in un caso generico) sempre in
compressione come verso e con modulo e direzione non note a priori, la forza Fm
muscolare che si applica nel punto in cui i tendini del muscolo si inseriscono nella
struttura scheletrica (muscoli estensori che si inseriscono sulla parte lombare del Fw
tronco) con direzione sempre legata al fatto che il muscolo può solo contrarsi quindi Fg
sempre verso l’esterno. In questo caso la forza dell’aria è trascurabile.
Scegliendo, invece, di lavorare sulla parte bassa del soggetto, avremo la forza peso dei segmenti considerati
(coscia, gamba e piede dx e sx) perpendicolare al terreno e diretta verso il basso, la reazione vincolare al
terreno Fg, la forza di reazione all’articolazione Fj esattamente analoga al caso precedente ma con verso
opposto ed Fm che è la forza muscolare analoga a prima ma trasmessa al segmento del femore.
Nonostante la forza muscolare sia esattamente la stessa nei due casi, risulta più conveniente il primo
sistema considerato perché è sufficiente calcolare la forza peso del bilanciere che è sostanzialmente nota;
nel secondo caso occorre stimare un numero di forze maggiore, tra cui la reazione vincolare al terreno.
Valutazione delle forze dei muscoli di un bicipite per sollevare un bilanciere
Nel caso di bicipite brachiale si ha il muscolo con un tendine che lo
Fj
collega all’omero e uno che lo collega al segmento distale. I due segmenti
di braccio e avambraccio risultano uniti in corrispondenza
Fm dell’articolazione del gomito. Supponendo di separare il segmento
braccio da quello di avambraccio, la forza muscolare che agisce su
quest’ultimo è quella che ha come punto di applicazione il punto di
Fj
inserzione del tendine all’avambraccio stesso (si conosce il punto medio
Fm
di inserzione) e si inserisce con un angolo, definito di inserzione (angolo
che il vettore forma con la struttura scheletrica, nota che varia con la
geometria). La forza muscolare Fm è quella sviluppata dal bicipite che si trasferisce a entrambi i segmenti,
uno fisso e uno in movimento.
Fj è la stessa, uguale in modulo e in direzione e opposta per quanto riguarda il verso, è la forza che deriva
dall’interazione dei due segmenti a livello dell’articolazione gomito ed è in compressione sui punti di
inserzione dell’avambraccio.
Valutazione delle forze dei muscoli lombari
A livello dei muscoli lombari le cose non cambiano in quanto abbiamo il segmento tronco (rigido per
semplicità anche se ci sono le articolazioni vertebrali) e il segmento coscia e femore; i muscoli lombari
hanno due inserzioni tendinee. La forza generata dai muscoli è Fm ma in un caso è applicata sul segmento
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 4 di 134
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 5 di 134
femore in un certo punto di inserzione e con un certo angolo di inserzione e in un altro in un punto di
inserzione del tronco con un altro angolo.
Considerazioni aggiuntive
Quando disegniamo il diagramma di corpo libero dobbiamo semplificarci la vita. Nei casi proposti, tutti i
movimenti sono risultati simmetrici quindi è stato possibile semplificare il diagramma di corpo libero sul
piano sagittale; ad esempio nel considerare il segmento tronco, un segmento unico per braccio,
avambraccio e mano destro e sinistro. Nel caso in cui ci fosse il sollevamento di due bilancieri diversi con i
due arti, dovremmo considerare questi ultimi separatamente.
Le forze muscolari agiscono su un punto di inserzione quindi hanno un braccio di applicazione da
considerare quando bisogna calcolare la coppia generata rispetto all’articolazione; a seconda della
convenienza disegniamo la forza muscolare con il relativo braccio o direttamente la coppia.
Dal momento che il nostro sistema corpo umano è costituito da segmenti in prima approssimazione rigidi,
collegati mediante articolazioni, generalmente ci interessa stimare le coppie piuttosto che le forze.
13 ottobre 2017
Terminologia di riferimento standard
Quando occorre definire la postura di un soggetto e il suo movimento, bisogna fare riferimento ad una
terminologia standard che però non esiste in modo universale ma si differenzia in base alla figura
professionale con cui abbiamo a che fare; si notano pertanto discrepanze tra la terminologia utilizzata da
un fisioterapista piuttosto che da un fisiatra ecc.
Quando definiamo un movimento, lo facciamo rispetto alla posizione di riferimento standard del soggetto
uomo definita come un soggetto in piedi, con gli arti allineati e quelli superiori rilassati con il palmo delle
mani rivolto in avanti. Da questa posizione si possono definire gli angoli di flessione, di abduzione e
adduzione ecc.
Termini direzionali
In base alle considerazioni che facciamo di un segmento rispetto ad un altro dovremo utilizzare i seguenti
termini:
Superiore
Inferiore
Anteriore
Posteriore
Mediale
Laterale
Prossimale
Distale
Superficiale
Profondo
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 5 di 134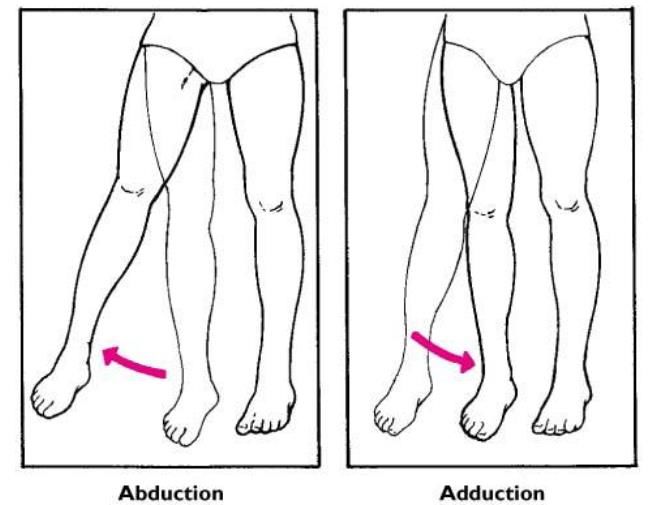
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 6 di 134
Occorre avere uno standard di riferimento anche per i movimenti che vengono definiti rispetto ai piani o
agli assi di rotazione. I piani rispetto ai quali si definisce un movimento sono:
- Piano frontale: divide il corpo umano in parte anteriore e
posteriore
- Piano sagittale: divide il corpo in lato sinistro e lato destro
- Piano trasverso: divide il corpo in parte superiore e posteriore
Tutti i piani passano per il centro di massa del soggetto.
Per esempio, il sollevatore di pesi svolge un gesto atletico che si
sviluppa sostanzialmente nel piano sagittale mentre in quello frontale è
simmetrico.
Gli assi vengono definiti sulla base dell’intersezione dei piani o, in altre
parole, una coppia di piani definisce un asse e servono per definire i
movimenti di rotazione attorno ad un’articolazione.
L’asse longitudinale è quello che deriva dall’intersezione del piano
sagittale con quello frontale, l’asse mediolaterale (o frontale) si ottiene
dall’intersezione tra piano frontale e il piano trasverso, l’asse
anteroposteriore (o sagittale) deriva dall’intersezione del piano
sagittale e con quello trasverso.
Movimenti nel piano sagittale
Per definizione, nella posizione anatomica di riferimento tutti i segmenti vengono considerati posizionati ad
un angolo nullo. Quindi il nostro angolo di abduzione del braccio in posizione anatomica è pari a zero e, allo
stesso modo, l’angolo di flessione dell’avambraccio rispetto al braccio è nullo.
Nell’immagine vediamo i movimenti di flessione, estensione e iperestensione del braccio, che avvengono
nel piano sagittale.
Potremmo fare analoghe considerazioni sull’avambraccio.
Troveremo due terminologie diverse: flessione dell’avambraccio piuttosto che flessione del gomito in
quanto possiamo riferirci al segmento distale rispetto all’articolazione oppure all’articolazione stessa.
Per il braccio possiamo parlare di flessione del braccio oppure della spalla.
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 6 di 134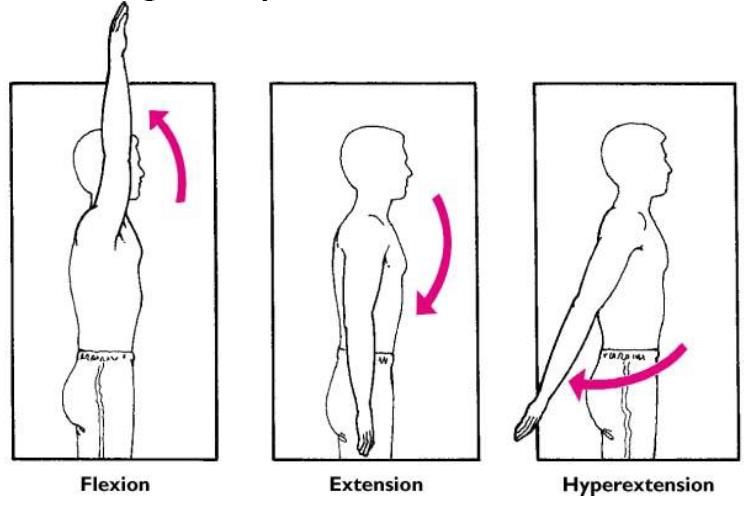
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 7 di 134
Movimenti nel piano frontale
Movimenti sul piano frontale sono quelli di abduzione (allontanamento del segmento distale da quello
prossimale) e adduzione (avvicinamento). Nell’immagine ne vediamo un esempio.
Articolazioni come il ginocchio e il gomito non possono avere movimenti di adduzione e abduzione.
Movimenti nel piano trasverso
I movimenti nel piano trasverso sono quelli di intra-rotazione ed extra-rotazione.
Sinonimo di intra-rotazione è rotazione mediale, mentre sinonimo di extra-rotazione è rotazione laterale.
Per alcuni segmenti non si parla di flessione ed estensione ma di plantaflessione (abbassamento) o
dorsiflessione (alzamento).
Muscoli agonisti, antagonisti, stabilizzatori e sinergici
Possiamo distinguere i muscoli in:
- Agonisti: partecipano al movimento.
Per esempio il bicipite brachiale è agonista della flessione del gomito
- Antagonisti: svolgono un’azione contraria al movimento.
Per esempio l’antagonista della flessione del gomito è il tricipite che si contrae e si oppone al
movimento di flessione stesso.
Il fatto che un muscolo sia agonista o antagonista dipende dal movimento che si considera: rispetto agli
esempi proposti, se consideriamo l’estensione dell’avambraccio l’agonista è il tricipite e l’antagonista è il
bicipite.
Per quanto riguarda un movimento non esiste un solo agonista e un solo antagonista: il sistema muscolare
è ridondante e quindi più muscoli sono agonisti di un movimento.
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 7 di 134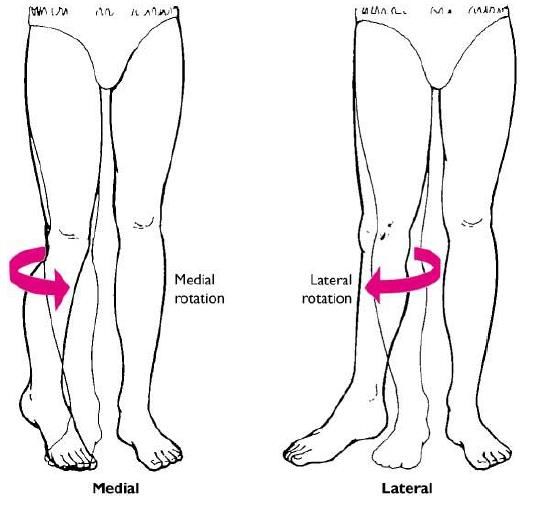
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 8 di 134
Per esempio nella flessione del braccio agonisti sono il bicipite (capolungo e capobreve), il brachioradiale
(avambraccio che lavora sull’articolazione di gomito) e il brachiale (interno).
- Stabilizzatori: intervengono per fissare un’articolazione durante un movimento in modo da
eliminare la possibilità di avere movimenti non desiderati di segmenti corporei.
Per esempio se consideriamo la flessione della spalla, i muscoli flessori sono il deltoide anteriore e il
capobreve del bicipite brachiale, siccome la spalla è molto complessa come articolazione se non
avessimo gli stabilizzatori avremmo dei movimenti disarticolati: intervengono il trapezio superiore e
l’elevatore della scapola, sono muscoli che agiscono su strutture scheletriche interessate al
movimento per garantirne stabilità.
- Sinergigi: simili agli stabilizzatori, hanno una funzione opposta a quella del movimento generato
dall’agonista e servono per evitare movimenti indesiderati.
Per esempio se eseguiamo un’estensione del polso e vogliamo mantenere la mano con le dita
estese verso l’alto, attiviamo gli estensori del polso ma dobbiamo attivare anche gli estensori delle
dita, in caso contrario, per l’accoppiamento meccanico dei tendini, le dita andrebbero a flettersi.
Alcuni muscoli hanno più di una funzione. Per esempio il bicipite capobreve e quello capolungo si
inseriscono entrambi sul segmento osseo avambraccio ma prossimalmente hanno due inserzioni diverse; a
seconda di dov’è l’inserzione il capolungo ha solo una flessione mentre quello breve ha due azioni ovvero
flessione dell’avambraccio e flessione del braccio. Un altro esempio è il retto femorale (muscolo della
coscia) che svolge due azioni: l’estensione della gamba (ginocchio) e la flessione dell’anca (per capire il
movimento pensare allo skip).
Relazione lunghezza-tensione nei muscoli
Il muscolo è un organo in grado di generare forza contrattile, ma questa forza non è sempre costante. La
forza generata non è indipendente dalla lunghezza del muscolo ma presenta una curva di generazione che
dipende dal livello di accorciamento del muscolo legato alla sovrapposizione di actina e miosina.
Il muscolo è in grado di generare una forza massima quando è alla sua lunghezza di riposo (né contratto né
stirato) e avrà man mano la capacità di sviluppare forze inferiori quanto più è contratto ed esteso.
Indipendemente da altri fattori, ciò che influenza la generazione della forza è il braccio di applicazione della
forza stessa (parliamo di forza e non di coppia per ora). Quindi se vogliamo misurare la forza massimale di
uno specifico muscolo, dobbiamo effettuare le misurazioni in posizioni specifiche in cui il muscolo è a
riposto (isometrico).
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 8 di 134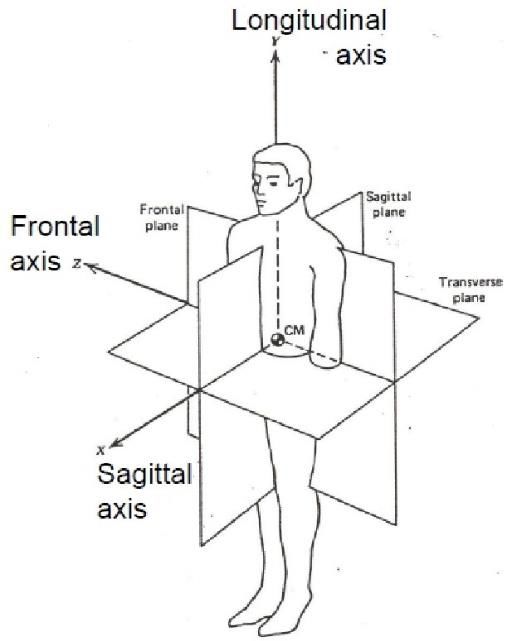
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 9 di 134
Noi consideriamo il sistema uomo come fatto da segmenti scheletrici rigidi che vengono mossi dai muscoli
collegati sia al segmento prossimale che a quello distale. Nell’anatomia possiamo trovare diverse
configurazioni di inserzione dei muscoli riconducibili alle leve.
Meccanicamente, ogni osso è una leva e ogni unione è un fulcro. I muscoli forniscono una forza applicata
(AF) necessaria a vincere una resistenza (R).
In base alla relazione tra fulcro, forza motrice e forza resistente possiamo fare la seguente distinzione:
1. Leva di primo genere (o interfulcro): il fulcro su cui avviene il movimento si trova tra la forza
applicata e la forza resistente.
Per quanto riguarda l’anatomia umana, una leva di questo tipo è riconducibile al caso
dell’estensione del capo: il fulcro è la vertebra cervicale, la forza resistente è data dal peso della
testa in direzione anteriore e la forza motrice è data dai muscoli estensori del capo che si trovano
in zona posteriore.
2. Leva di secondo genere (o interresistente): la forza resistente si trova tra il fulcro e la forza
applicata.
Per quanto riguarda il sistema muscolo-scheletrico, possiamo considerare come fulcro il centro di
pressione del piede sul terreno di appoggio, il vettore della forza resistente si applica al centro di
massa del soggetto ed è diretto verso il basso e la forza muscolare è quella del gastrocnemio sulla
punta dei piedi che lavora con un braccio di applicazione rispetto al fulcro maggiore rispetto al
braccio di applicazione della forza resistente.
Si tratta di un vantaggio del muscolo rispetto alla forza resistente e si parla infatti di leva
vantaggiosa in quanto è necessario svolgere una forza minore rispetto al peso.
3. Leva di terzo genere (o intepotente): la forza resistente e quella applicata sono dalla stessa parte
del fulcro ma il braccio di applicazione della forza resistente è maggiore.
Un esempio è il bicipite che agisce sull’articolazione del gomito, si inserisce a circa 1.5-2 cm
dall’articolazione del gomito sull’avambraccio.
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 9 di 134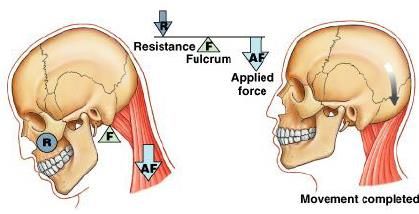
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 10 di 134
Dal punto di vista della forza ci troviamo in una situazione sfavorevole in quanto c’è uno svantaggio
meccanico. Tuttavia questa situazione presenta un notevole vantaggio a livello del range of motion
e per quanto riguarda la velocità di movimento (velocità di rotazione dell’effettore molto maggiore
di quella di accorciamento del muscolo).
Leve nel sistema muscolo-scheletrico
La forza del muscolo viene sviluppata lungo l’asse longitudinale del muscolo stesso
(freccia rossa). Scomponendola avremo un contributo verticale che sostiene il
peso, maggiore di quest’ultimo, e un contributo orizzontale che non regge il peso
ma fornisce una reazione vincolare Fj.
Si tratta di una leva sfavorevole.
Origine del muscolo: punto in cui il tendine del muscolo si inserisce sul segmento scheletrico fisso.
Inserzione del muscolo: punto in cui il muscolo si collega tramite il tendine al segmento che si muove.
In generale l’origine è sul segmento più prossimale e l’inserzione su quello più distale.
Per quanto riguarda la flessione del gomito, il bicipite capolungo ha origine sull’omero dove si inserisce il
tendine prossimale mentre l’inserzione è sul segmento distale ovvero sull’avambraccio.
Se consideriamo l’estensione della gamba, i muscoli che contribuiscono al movimento sono almeno tre,
ovvero retto femorale, vastomediale e vastolaterale; questi hanno origine sul femore e inserzione sulla tibia
distale che viene mossa.
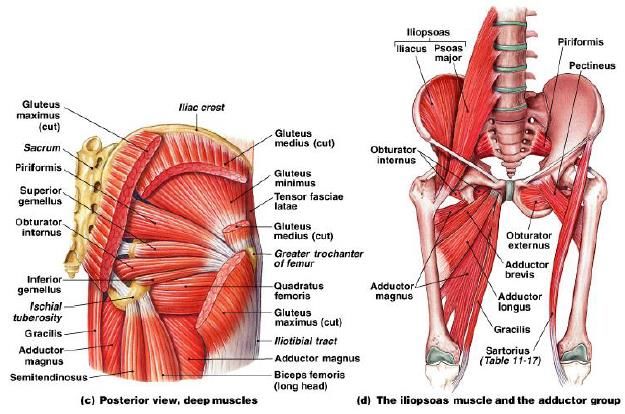
Muscoli che muovono la coscia
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 10 di 134Centro stampa Copysprinter – Stampa Autorizzata dall’autore 11 di 134
Muscoli che muovono la gamba
Per l’estensione della gamba lavorano il retto femorale, il vasto laterale, mediale e quello intermedio.
Il muscolo che lavora sull’articolazione del ginocchio è un estensore ed è un muscolo biarticolare perché
attraversa due articolazioni (muscolo retto-femorale). Questo muscolo ha una duplice reazione: estensione
della gamba come gli altri due vasti ma anche la flessione dell’anca.
Un altro esempio di muscolo biarticolare è il muscolo sartorio che ha origine sulle cresta iliaca inferiore e
inserzione sulla tibia. È un muscolo che agisce come adduttore della gamba spostandola dal’esterno verso
la posizione mediale, ma ha anche un’attività sulla flessione dell’anca.
(muscolo sartorio: parte dall’inguine in alto esternamente e arriva all’interno del ginocchio, “attraversa la
coscia in obliquo”).
Muscoli che muovono il piede e la caviglia
Centro stampa Copysprinter – Stampa Autorizzata dall’autore 11 di 134Puoi anche leggere