La Riabilitazione Robot-assistita del cammino nel paziente affetto da stroke: stato dell'arte e attuali indicazioni
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

LETTERATURA INTERNAZIONALE
La Riabilitazione Robot-assistita del cammino
nel paziente affetto da stroke: stato dell’arte e
attuali indicazioni
Gregorio SORRENTINO1, Rocco Salvatore CALABRÒ2, Donatella BONAIUTI3
1
Dpt Medicina Fisica e Riabilitazione, Policlinico di Monza, Monza
2
IRCCS Centro Neurolesi “Bonino Pulejo”, Messina
3
Società Scientifica Medicina Fisica e Riabilitativa SIMFER
Abstract itativo Individuale del paziente con dizionamento cardiovascolare e
esiti di stroke, chiarendo gli aspetti muscolare) (2) significativamente ri-
La riabilitazione robot assistita si è anche applicativi dell’utilizzo dei dotte rispetto ai valori medi riscon-
molto diffusa nei Centri riabilitativi e diversi dispositivi esistenti sul mer- trabili nella popolazione sana di pari
consolidata come evidenze, negli ul- cato, e sottolineando i limiti e la età, mentre il 20% ha perso comple-
timi anni, anche per merito di nu- non conclusività delle conoscenze tamente l’autonomia ed è costretto
merosi studi che ne hanno sottolin- attuali. in carrozzina. (3)
eato l’utilità. La significativa riduzione dell’endur-
Questo in particolare per il recupero ance e la precoce faticabilità cogniti-
del cammino nel soggetto con esiti di Introduzione
va, tipica del paziente neurologico,
ictus. Nei paesi industrializzati è stata cal- determinano un’altra limitazione
Scopo del presente lavoro è quello di colata un’incidenza annuale di ic- importante delle prestazioni durante
fornire al riabilitatore una estrema tus – patologia più comune tra il training neuromotorio (4). Le
sintesi dei risultati della letteratura e quelle neurologiche acquisite- che sedute riabilitative finalizzate al re-
delle acquisizioni da implementare va dai 76 casi per 100.000 all’anno cupero del cammino risultano dun-
nella pratica clinica, pur nella cons- in Australia ai 119 per 100.000 del- que estremamente impegnative sia
apevolezza che si è solo all’inizio di la Nuova Zelanda (1). Grazie al cos- da un punto di vista fisico che men-
una definizione dell’esatta “posolo- tante miglioramento delle tecniche tale e necessitano, spesso, di un rap-
gia” per un utilizzo corretto, basato di rianimazione ed all’introduzione porto numero terapisti su numero
sulle evidenze, e clinicamente appli- nella pratica clinica di tecnologie e pazienti superiore a uno, con un pe-
cabile per il recupero del cammino protocolli terapeutici sempre più sante impatto in termini di risorse da
negli esiti di ictus con dispositivi ro- efficaci, negli ultimi decenni si è as- impegnare.
botizzati. sistito ad un progressivo e significa- L’applicazione della tecnologia ro-
In questo lavoro si vuole trasmettere tivo aumento dell’aspettativa di botica in riabilitazione si inserisce in
le nozioni elementari limitatamente vita in soggetti affetti da ictus cere- questo contesto.
alla classe di dispositivi maggior- bri. Tale cambiamento del quadro L’utilizzo di un dispositivo robotico
mente diffusi: gli apparecchi robotiz- socio-demografico ed economico, permette di alleggerire il lavoro
zati su superfici fisse. Queste nozioni anche in un’ottica di politiche pub- dell’operatore con modalità di al-
che si raffineranno nei prossimi bliche e sanitarie, impone un’atten- levio del peso e di intensificare il
anni, per la conoscenza delle poten- ta presa in carico riabilitativa, con trattamento permettendo esercizi al-
zialità di questi utili e innovativi l’obiettivo di massimizzare le possi- tamente ripetitivi, progressivamente
strumenti per la riabilitazione, al bilità di recupero (ad oggi ancora intensivi e programmabili sulla base
fine di migliorare le nostre possibilità parziali) allo scopo di limitare il più delle necessità del paziente. Infatti, i
di trattamento per renderlo più effi- possibile la disabilità residua di dispositivi robotizzati sono dotati di
cace. queste persone. sistemi di controllo adattivi che per-
Pertanto abbiamo presentato il razi- Tra le varie problematiche seconda- mettono, nel caso della riabilitazi-
onale dell’utilizzo della robotica su rie a un danno neurologico, il deficit one, di individualizzare il trattamen-
superfici fisse per la riabilitazione del cammino rappresenta una delle to a seconda delle necessità e abilità
del cammino sulla base delle nu- più importanti ed invalidanti. A tre residue specifiche di ciascun pazi-
merose evidenze e delle linee guida mesi dall’ictus circa il 70% dei pazi- ente, al fine di favorire il recupero
nazionali e internazionali, come enti superstiti ha infatti velocità nel sensomotorio, cognitivo e comporta-
parte integrante del Progetto Riabil- cammino ed endurance (i.e. decon- mentale.
10 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa
LETTERATURA INTERNAZIONALE
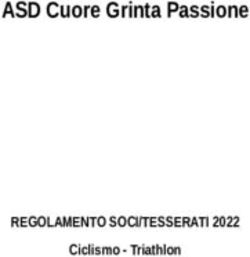
Negli ultimi anni sono inoltre com- La riabilitazione del cammino robot spazio su superfici non meccanizza-
parsi in commercio dispositivi robot- assistita te) e, mentre gli end-effector robots
izzati che permettono l’esecuzione sono organizzabili in footplate-based e
del training in modo semi-autono- Hobbs e Artemiadis (8) hanno te- platform-based. (12 – 14).
mo, con la programmazione individ- orizzato, a fini sostanzialmente di- Lokomat, BLEEX, HAL e LOPES
uale impostata dal riabilitatore, ridu- dattici, tre distinte strategie di ap- sono tra gli esoscheletri più comune-
cendo quindi l’impegno diretto delle proccio riabilitativo che possono es- mente citati in letteratura mentre
risorse umane e migliorando l’ad- sere insite nell’utilizzo dei dispositivi strumenti quali Gait-Trainer, G-EO
robotizzati: System e Haptic Walker sono i robot
erenza ai trattamenti.
– Targeted sensorimotor pathways (at- end-effector più rappresentati negli
Questi dispositivi permettono anche
traverso meccanismi di coordi- studi. In fig.1e 2 sono illustrati i ro-
di raccogliere informazioni quali/
nazione inter-arto, percezione bot su superfici fisse esoscheletrici e
quantitative sul movimento del pazi-
aptica e cutanea, propriocezione end effector più presenti nel mercato
ente, attraverso sistemi di raccolta
e percezione audio-visiva); italiano: il Lokomat e il GEO system.
dati, monitorando le performances
– Physical implementation (attraverso In questa overview saranno trattati,
durante ogni sessione e i risultati del esercizi task-oriented, stimolazione
training, e concorrono a individual- come argomento iniziale e fonda-
elettrica e magnetica, esoscheletri mentale di conoscenza fisiatrica, i
izzare il programma riabilitativo ed ortesi potenziate, allevio del
adattandosi alle caratteristiche del dispositivi robotici agenti su superfici
carico, end-effectors);
paziente, pur continuando a mante- fisse.
– Interaction goal & type (feedback
nere carattere di riproducibilità e se- aumentativo con correzione re-
rialità. (5) al-time dell’errore). La riabilitazione robot assistita per
Queste caratteristiche, specifiche dei Ad oggi non esiste un’unica classifi- il cammino nel paziente affetto da
dispositivi robotici, rendono questa cazione dei vari dispositivi attual- ictus cerebri
tecnologia particolarmente funzio- mente in commercio.
nale alla riabilitazione del deficit Non esistono ancora raccomandazi-
In generale, e dal punto di vista ap-
neuromotorio. (6) oni esaustive sull’utilizzo della ro-
plicativo clinico, i diversi dispositivi
Relativamente alla riabilitazione del botica nello stroke.
posso essere distinti sulla base della
modalità di controllo, distinguendo Diverse Linee Guida internazionali e
cammino, gli studi che propongono
tra Robot In Charge (RIC) e Patient in nazionali che si occupano della ri-
l’ausilio di tecnologia robotica (co-
Charge (PIC) (9). Nel primo caso il abilitazione dei pazienti con acciden-
nosciuta in letteratura col termine
paziente viene guidato dalla macchi- ti cerebrovascolari, in accordo con il
Robot-Assisted Gait Rehabilitation,
na all’interno di una cinematica resto della letteratura sulla RAGT
RAGT) si occupano dell’argomento
completamente predeterminata e (15 - 20), concludono per una sua
che ha visto il più grande sviluppo
non ha possibilità di deviare rispetto maggiore efficacia rispetto al solo
negli ultimi anni in termini di pub-
alla traiettoria programmata, nel trattamento convenzionale, se in
blicazioni scientifiche.
secondo il paziente interagisce con il add-on, ovvero in aggiunta all’usuale
I dispositivi attualmente disponibili
sistema con un certo grado di tolle- training per il cammino.
per la RAGT sfruttano principi di mo-
ranza cinematica. Pertanto, esse sostengono, dopo un
tor learning (risultanti da attività mo- ictus, l’utilità del training robot as-
torie finalistiche proposte in maniera Un’altra classificazione dei disposi-
tivi impiegati per la riabilitazione, sistito per il cammino che in ogni
seriata ad alta intensità) che implica- caso non deve essere utilizzato al
quella più nota, è quella che opera
no l’impegno attivo (motorio e cog- posto del trattamento convenzionale
una distinzione tra end-effector ed es-
nitivo) del paziente. (4,7) ma deve essere integrato, e in aggi-
oscheletri (10-11). I sistemi a es-
Le tecnologie robotiche già dis- unta al resto dei trattamenti, nel pia-
oscheletro sono tipicamente fissati ai
ponibili sul mercato o in fase speri- no riabilitativo individuale.
segmenti corporei ed imprimono dif-
mentale presentano caratteristiche Più precisamente, esse suggeriscono
ferenti forze essenzialmente secondo
talora assai diverse tra loro, sia dal che tale tipo di training venga sem-
linee e gradi finiti. I sistemi end-ef-
punto di vista della costruzione mec- fector prevedono invece un solo pre considerato per i soggetti che
canica che rispetto ai loro sistemi di contatto uomo macchina, localizzato non recupererebbero in altro modo
controllo e quindi presentano indi- all’estremità distale dell’arto e non una deambulazione, ovvero quelli
cazioni e modalità di utilizzo diverse. prevedono restrizioni dei gradi di lib- più gravemente compromessi, e che
Scopo di questa brief overview è forni- ertà articolari. (10) i migliori risultati sono registrabili se
re una panoramica delle tecnologie, É possibile operare un’ulteriore sot- il training avviene nei primi 3 - 6
dei dispositivi più diffusi esistenti sul toclassificazione degli esoscheletri tra mesi dall’evento (19).
mercato, e indicazioni sulle modalità treadmill-based, ovvero fissi (possono Purtroppo dall’esame di queste Linee
di applicazione della riabilitazione esercitare in uno spazio fisso, come Guida non emergono indicazioni su
robot-assistita del cammino in sog- su treadmill), o leg outhouses to train quali specifici dispositivi utilizzare
getti affetti da deficit della deam- over ground, ovvero mobili (indossati, nelle diverse fasi del recupero o nei
bulazione a seguito di ictus cerebri. permettono un cammino nello diversi livelli di disabilità e tanto
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 11
LETTERATURA INTERNAZIONALE
to, con risultati sull’incremento di
velocità di cammino tanto migliori
quanto precoce è l’inizio del tratta-
mento. Non ravvisa invece significa-
tivi miglioramenti in pazienti in fase
cronica.
Al contrario, Mazzoleni e colleghi
hanno rilevato miglioramenti anche
in fase cronica, nell’endurance e nel-
la autonomia del cammino, espressa
come livello di Functional Ambula-
tory Cathegory (FAC), e hanno cor-
relato i migliori risultati anche a una
maggiore frequenza delle sessioni
(22).
Relativamente al livello di disabilità,
e a sostegno di quanto già sostenuto
dalle Linee Guida internazionali, la
riabilitazione robot assistita del cam-
mino con allevio del carico pare es-
sere funzionale al raggiungimento
dell’autonomia deambulatoria so-
Figura 1 prattutto nei soggetti gravi (FACLETTERATURA INTERNAZIONALE
colazioni, se i pazienti sono molto ciata alla riabilitazione standard. misure cinematiche, per la migliore
compromessi è maggiormente nec- Per quanto riguarda l’associazione individualizzazione del training.
essaria un’assistenza diretta e man- RAGT e Realtà Virtuale tre linee gui-
uale da parte del fisioterapista. Al da nazionali (Australia, Olanda e Considerazioni finali
contrario, tutto ciò è possibile senza Nuova Zelanda) pongono indicazi-
il contatto manuale del riabilitatore one a questo binomio, senza far Sulla base della letteratura scientifica
nel caso dei robot esoscheletrici che, riferimento a tempi e modalità di e con il parere degli esperti che van-
consentendo il controllo selettivo di utilizzo (31). Più in particolare, l’uti- no operando ormai da anni in questo
singole articolazioni (tipicamente lizzo di Realtà Virtuale unita a rtrain- campo, possiamo concludere per
anca e ginocchio), permettono il ing robot assistito sembrerebbe pro- l’efficacia del trattamento riabilitati-
trattamento specifico di problemi durre migliori risultati in termini di vo robot assistito per il recupero del
quali il recurvatum di ginocchio e il accettabilità e motivazione, anche se cammino negli esiti di stroke.
deficit di estensione dell’anca. non sembra cambiare gli outcome Possiamo anche iniziare a identifi-
Al termine di questa veloce esame funzionali (32). care i dispositivi robotici più “adatti”
dei dati di letteratura integrati dalle per le caratteristiche funzionali e
cliniche e i livelli di disabilità, ma, in
esperienze cliniche che si vanno via Le misure di outcome per il training termini di dose e protocolli è possi-
via mettendo in pratica , è utile cita-
re un interessante lavoro del gruppo
robot assistito nel paziente con bile mettere in evidenza ancora in
di Morone (27 ) che semplifica il esiti di stroke letteratura una grande variabilità da
profilo delle indicazioni emerse fino- cui risulta non facile identificare
A questo proposito, la letteratura
un’indicazione standardizzabile.
ra, classificando i pazienti sulla base non è conclusiva.
È generalmente suggerito l’utilizzo
della funzionalità e del cammino con Gli studi ricorrono a numerose scale
della riabilitazione robot-assistita
la Functional Ambulatory Cathegory e misure funzionali cammino-cor-
come add-on rispetto al trattamento
, FAC, e indicando la classe di dis- relate come endpoint del trattamen-
convenzionale. Nel paziente con esiti
positivi robotizzati, elettromeccanici to robotico rendendo difficilmente
di ictus cerebri, dove troviamo molta
e meccanici maggiormente utili nelle comparabili i risultati dei vari trials.
letteratura scientifica, emergono al-
diverse fasi del recupero sensomoto- Ad ogni modo è evidenziabile un ri-
cuni suggerimenti dalla nostra sinte-
rio. Nel suo studio ha messo in evi- levante utilizzo di indicatori clinici
si, in base alla disabilità classificata
denza come le differenti tecnologie (cammino-correlate come endpoint con FAC: i pazienti con disabilità più
di RAGT siano funzionali, ognuna del RAGT) che, pur differenziandosi grave (FACLETTERATURA INTERNAZIONALE
3 Jorgensen H.S., Nakayama H., Raa- study. Brain Inj. 2008;22(7-8):625- M, ldner A, Spagnuolo C, battini E,
schou H.O., Olsen T.S., Recovery of 6 3 2 . Bonaiuti D.et al. Robot-assisted
walking function in stroke patients: doi:10.1080/02699050801941771 end-effector-based gait training in
the Copenhagen Stroke Study, Arch. 13 Banala SK, Kim SH, Agrawal SK, chronic stroke patients: A multicentric
Phys. Med.Rehabil., Aug. 1995; 76(8): Scholz JP. Robot assisted gait training uncontrolled observational retrospec-
788-9. with active leg exoskeleton (ALEX). tive clinical stude2y. NeuroRehabilita-
4 Riikka Pihlaja , Jenni Uimonen , Satu IEEE Trans Neural Syst Rehabil Eng. tion. 2017;40(4):483-492.
Mustanoja , Turgut Tatlisumak , Erja 2009;17(1):2-8. doi:10.1109/TN- doi:10.3233/NRE-161435
Poutiainen. Post-stroke fatigue is as- SRE.2008.2008280 23 Ada lL, M Dean C, Vargas J, Ennis S.
sociated with impaired processing 14 Arnez-Paniagua V, Rifai H, Amirat Y, Mechanically assisted walking with
speed and memory functions in Mohammed S. Adaptive control of an body weight support results in more
first-ever stroke patients. Psychosom actuated-ankle-foot-orthosis. IEEE independent walking than assisted
Res. 2014 Nov;77(5):380-4. doi: Int Conf Rehabil Robot. overground walking in non ambula-
10.1016/j.jpsychores.2014.08.011. 2017;2017:1584-1589. doi:10.1109/ tory. J Physiother 2010 ; 56(3): 153-
Epub 2014 Aug 30. ICORR.2017.8009474 61. doi 10.1016.s1836-
5 Calabrò RS, Cacciola A, Bertè F, et al. 15 Mehrholz J.,Thomas S., Kugler J, 9553(10)70020-5
Robotic gait rehabilitation and substi- Pohl M., Elsner B. Electromechani- 24 Kim JY, Kim DY, Chun MH, Seong
tution devices in neurological disor- cal-assisted training for walking after Woo Kim, Ha Ra Jeon, Chang Ho
ders: where are we now? Neurol Sci. stroke. Cochrane Database Syst Rev. Hwang, Jong Kyoung Choi, Suhwan
2016;37(4):503-514. doi:10.1007/ 2020 Oct 22;10(10):CD006185. doi: Bae Effects of robot-(Morning Walk
s10072-016-2474-4 10.1002/14651858.CD006185.pub5. ®) assisted gait training for patients
6 Klamroth-Marganska V. Stroke Reha- 16 Maranesi E, Riccardi GR, Di Donna V, after stroke: a randomized controlled
bilitation: Therapy Robots and Assis- et al. Effectiveness of Intervention trial Clin Rehabil. 2019 Mar;33(3):516-
tive Devices. Adv Exp Med Biol. Based on End-effector Gait Trainer in 523. doi: 10.1177/0269215518806563.
2018;1065:579-587. doi:10.1007/978- Older Patients With Stroke: A System- Epub 2018 Oct 16.
3-319-77932-4_35 atic Review. J Am Med Dir Assoc. 25 Suo-Hsiu Chang, Taimoor Afzal, TIRR
7 Winstein CJ, Stein J, Arena R, et al. 2020;21(8):1036-1044. doi:10.1016/j. SCI Clinical exoskeleton Groupç Jef-
Guidelines for Adult Stroke Rehabili- jamda.2019.10.010 frey Berliner, Gerard Francosco. Exo-
tation and Recovery: A Guideline for 17 Cho JE, Jun Sang Yoo, Kyoung Eun skeleton assisted gait training to im-
Healthcare Professionals From the Kim, Cho ST, Woo Seok Jang, Cho prove gait in individuals with spinal
American Heart Association/Ameri- KH, Wan-Hee Lee Systematic Review cord injury ; a pilot randomized study.
can Stroke Association. Stroke. of Appropriate Robotic Intervention Pilot Feasibility Stud. 2018 Mar 5;
2016;47(6):e98-e169. doi:10.1161/ for Gait Function in Subacute Stroke 4,62. doi; 10.1186 s40814-0180247-y.
STR.0000000000000098 Patients Biomed Res Int. 2018 Feb Ecollection 2018
8 Hobbs B. and Artemiadis P. A Review 6;2018:4085298. doi: 26 Lefeber N, Eva Swinnen, Eric Kerck-
of Robot-Assisted Lower-Limb Stroke 10.1155/2018/4085298. eCollection hofs The immediate effects of ro-
Therapy: Unexplored Paths and Fu- 2018 bot-assistance on energy consump-
ture Directions in Gait Rehabilitation 18 Tedla J.S.,Dixit S., Gular K., Abo- tion and cardiorespiratory load during
Front Neurorobot. 2020 Apr 15;14:19. hashrh M. Robotic-Assisted Gait walking compared to walking without
doi: 10.3389/fnbot.2020.00019 Training Effect on Function and Gait robot-assistance: a systematic review
9 Juliet Am Haarman, Jasper Reenalda, Speed in Subacute and Chronic Stroke Disabil Rehabil Assist Technol. 2017
Jaap H Buurke, Herman van der Koo- Population: A Systematic Review and Oct;12(7):657-671. doi:
ij, Johan S Rietman The effect of ‘de- Meta-Analysis of Randomized Con- 10.1080/17483107.2016.1235620.
vice-in-charge’ versus ‘patient-in- trolled Trials Eur Neurol. 2019;81(3- Epub 2016 Oct 20.
charge’ support during robotic gait 4):103-111. doi: 10.1159/000500747. 27 Morone G, Paolucci S, Cherubini A,
training on walking ability and bal- Epub 2019 Jun 5. De Angelis D, Venturiero V, Coiro P,
ance in chronic stroke survivors: A 19 Calabrò R.S., Sorrentino G., Cassio A., Iosa M. Robot-assisted gait training
systematic review J Rehabil Assist Mazzoli D., et al, Italian Consensus for stroke patients: current state of the
Technol Eng. 2016 Nov Conference on Robotics in Neurore- art and perspectives of robotics. Neu-
29;3:2055668316676785. doi: habilitation (CICERONE). Robotic-as- ropsychiatr Dis Treat. 2017 May
10.1177/2055668316676785. eCol- sisted gait rehabilitation following 15;13:1303-1311. doi: 10.2147/NDT.
lection Jan-Dec 2016. stroke: a systematic review of current S114102. eCollection 2017.
10 Zhang J, Dong Y, Yang C, Geng Y, guidelines and practical clinical rec- 28 Picelli A, Brugnera A, Filippetti M ,
Chen Y, Yang Y. 5-Link model based ommendations. Eur J Phys Rehabil Mattiuz N, Chemello E, Modenese A ,
gait trajectory adaption control strate- Med. 2021 Jun;57(3):460-471. doi: Gandolfi M, Waldner A, Saltuari L,
gies of the gait rehabilitation exoskel- 10.23736/S1973-9087.21.06887-8. Smania N. Effects of two different
eton for post-stroke patients. Mecha- Epub 2021 May 5. protocols of cerebellar transcranial di-
tronics. 2010;20(3):368-376. 20 Bruni MF, Melegari C, De Cola MC, rect current stimulation combined
doi:10.1016/j.mechatron- Bramanti A, Bramanti P, Calabrò RS. with transcutaneous spinal direct cur-
ics.2010.02.003 What does best evidence tell us about rent stimulation on robot-assisted gait
11 Maciejasz P., Eschweiler J., Ger- robotic gait rehabilitation in stroke pa- training in patients with chronic su-
lach-Hahn K., Jansen-Troy A., Leon- tients: A systematic review and me- pratentorial stroke: A single blind,
hardt S. A survey on robotic devices ta-analysis. J Clin Neurosci. randomized controlled trial. Restor
for upper limb rehabilitation. J Neu- 2018;48:11-17. doi:10.1016/j. Neurol Neurosci. 2019;37(2):97-107.
roeng Rehabil. 2014 Jan 9;11:3. doi: jocn.2017.10.048 doi: 10.3233/RNN-180895.
10.1186/1743-0003-11-3. 21 Schwartz I, Meiner Z Ann Robotic-as- 29 Geroin C, Alessandro Picelli, Daniele
12 Freivogel S, Mehrholz J, Husak-Soto- sisted gait training in neurological pa- Munari, Andreas Waldner, Christo-
mayor T, Schmalohr D. Gait training tients: who may benefit? Biomed Eng. pher Tomelleri, Nicola Smania Com-
with the newly developed ’Loko- 2015 May;43(5):1260-9. doi: bined transcranial direct current stim-
Help’-system is feasible for non-am- 10.1007/s10439-015-1283-x. Epub ulation and robot-assisted gait train-
bulatory patients after stroke, spinal 2015 Feb 28. ing in patients with chronic stroke: a
cord and brain injury. A feasibility 22 Mazzoleni S, Focacci A, Franceschini preliminary comparison Clin Rehabil.
14 Vol. 36 - N. 3 - Giornale italiano di Medicina RiabilitativaLETTERATURA INTERNAZIONALE
2011 Jun;25(6):537-48. doi: 31 Calabrò RS, Naro A, Russo M, Leo A, NRE-172415.
10.1177/0269215510389497. Epub De Luca R, Balletta T, et al. The role of 33 Geroin C, Mazozleni S, Smania N,
2011 Mar 14. virtual reality in improving motor Gandolfi M, Bonaiuti D, Gasperini G,
30 Seo HG, Woo Hyung Lee, Seung Hak performance as revealed by EEG: a Sale P, Munari D, Walner A, Spi-
Lee, Youbin Yi, Kwang Dong Kim, randomized clinical trial. J Neuroeng dalieri R, Bovolenta F, Picelli A, Pos-
Byung-Mo Oh Robotic-assisted gait Rehabil. 2017;14(1):53. teraro F, Molteni F, Franceschini M.
training combined with transcranial 32 Park J, Chung Y The effects of ro- Systematic review of outcome mea-
direct current stimulation in chronic bot-assisted gait training using virtual sures of walking training using elec-
stroke patients: A pilot double-blind, reality and auditory stimulation on tromechanical and robotic devices in
randomized controlled trial Restor balance and gait abilities in persons patients with stroke. J Rehabil Med
Neurol Neurosci. 2017;35(5):527- with stroke. NeuroRehabilitation. 2013 Nov; 45(10): 987-96. doi:
536. doi: 10.3233/RNN-170745. 2018;43(2):227-235. doi: 10.3233/ 10.2340/16501977-234
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 15Puoi anche leggere