FISICA GENERALE CORSO H - BARI - Dinamica del corpo rigido
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

FISICA GENERALE MODULO A CORSO H – BARI Dinamica del corpo rigido Dott. Giannuzzi Giuseppe
Argomenti della lezione Dinamica del corpo rigido: - Pendolo composto - Moto di puro rotolamento. - Attrito volvente
Pendolo composto Il pendolo fisico o pendolo composto è un corpo rigido di forma qualunque, che viene sospeso per un punto che non coincide con il CM, come in figura, che possa oscillare per l’azione della forza peso in un piano verticale attorno ad un asse (orizzontale, passante per O) non passante per il CM. Spostando l’oggetto dalla posizione di equilibrio esso oscillerà (per piccole oscillazioni) con periodo 2 = Partiamo dal momento di inerzia: = + ℎ2 è il momento d’inerzia rispetto all’asse di rotazione dell’oggetto, con h la distanza del CM da O Il momento della forza peso è: − ℎ sin L’equazione del moto è (supponiamo nulli i momenti della forza di attrito) ( ) = = 2 − ℎ sin = 2

Pendolo composto 2 2 = − ℎ sin Che possiamo riscrivere come: 2 ℎ + sin = 0 2 e per piccoli angoli sin ≈ per cui otteniamo l’equazione differenziale del moto armonico con 2 2 + =0 2 ℎ Con 2 = la pulsazione (al quadrato). Soluzione: = 0 sin + 2 e il periodo sarà = = 2 = 2 ℎ con = ℎ lunghezza ridotta del pendolo composto e corrisponde alla lunghezza del filo di un pendolo semplice che oscilla con lo stesso periodo.
Pendolo reversibile di Kater Vi è anche una interessante proprietà che permette la misura di con lo strumento detto pendolo reversibile di Kater. + ℎ2 = = = + ℎ = ℎ′ + ℎ > ℎ con ℎ′ = quindi = ℎ ℎ′ ℎ ℎ ℎ ℎ la lunghezza individua un punto ’ distante ℎ’ dal centro di massa (come in figura). Se facciamo oscillare il corpo rigido attorno a questo punto ’ si trova una nuova oscillazione e una nuova lunghezza ridotta ’: ′ + ℎ′2 ′ ℎ ℎ′ ’ = = =ℎ + = ℎ′ ℎ′ ℎ′ ’ = ℎ + ℎ′ = Il periodo di oscillazione è lo stesso sia se il pendolo viene fatto oscillare attorno ad che ad ’ I due assi passanti per e ’ sono detti reciproci.

Moto di Roto-traslazione e moto di puro rotolamento È un caso particolare di roto-traslazione: abbiamo visto che per descrivere il moto di un generico punto P del corpo rigido per una qualunque situazione dovremmo dire che = + ′ = + ′ = + ′ , rispettivamente la velocità ed accelerazione del CM, ′ ′ sono la velocità ed accelerazione del punto rispetto al CM, sono la velocità ed accelerazione del punto nel sistema fisso. Nelle roto-traslazioni il moto attorno al CM è una pura rotazione per cui si ha ′ = × ′ ′ = × ′ ( ′ è il raggio vettore che individua il punto P rispetto al CM) Quindi nelle roto-traslazioni: = + × ′ = + × ′

Moto di traslazione e rotolamento Immaginiamo ora il moto della ruota di una bicicletta (corpo cilindrico o sferico). Se la ruota è bloccata nella rotazione (freni) allora la velocità di tutti i punti della ruota sono uguali e parallele: moto di traslazione e la ruota striscia sul piano. Quando la ruota slitta completamente (come quando c’è ghiaccio, attrito nullo) la ruota gira a vuoto senza traslare ed il punto di contatto P ha una velocità pari a = − in questo caso diciamo che il corpo rotola e striscia. L’asse di rotazione è nel centro geometrico (CM)
Moto di puro rotolamento Quando c’è invece una perfetta aderenza tra ruota e strada, il punto di contatto P ha velocità nulla ed il moto è chiamato rotolamento senza strisciamento o di puro rotolamento. In un intervallo di tempo dt, la ruota gira ( = ) di una quantità pari all’arco = e contemporaneamente il CM della ruota stessa avanza esattamente dello stesso tratto . Per cui si ottiene che: = = e dividendo tutto per otteniamo: = =
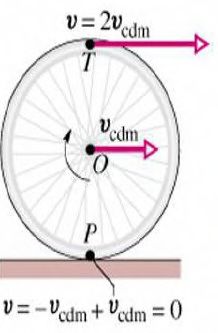
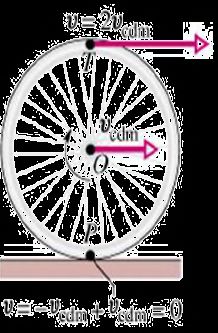
Moto di puro rotolamento Quindi nell’intervallo di tempo possiamo considerare il corpo ruotare con velocità angolare attorno ad un asse (fisso nel tempo ) passante per il punto di contatto P. Nell’intervallo di tempo successivo il punto di contatto è cambiato, P’, e si ripete la rotazione attorno al nuovo asse passante per P’ e così via. Inoltre = 0 ⇒ nell’intervallo di tempo agisce una forza che mantiene fermo il punto di contatto: si tratta di una forza di attrito (statico) con il piano. La velocità dei punti della ruota si può scrivere come = + × somma della velocità del CM e della velocità del punto rispetto al CM ( è la distanza del punto dal CM). Analizziamo le velocità per 3 punti caratteristici: - il centro di massa, O - il punto di contatto, P - ed il suo opposto, T

Moto di puro rotolamento = + × 0 = = = + × = + = 2 = 2 = + × = − = 0
Moto di puro rotolamento 0 = = = + × = + = 2 = 2 = + × = − = 0 Nel rotolamento senza strisciamento il punto di contatto (istantaneo) ha una velocità nulla = 0, quindi = − × , che equivale a dire che nel puro rotolamento, la velocità del CM e la velocità angolare non sono indipendenti. Per i moduli: = e = Questo particolare moto di roto-traslazione è equivalente ad una rotazione pura (senza traslazione) attorno al CM ed una traslazione del CM. Rotazione pura + Traslazione pura = Moti di rotolamento
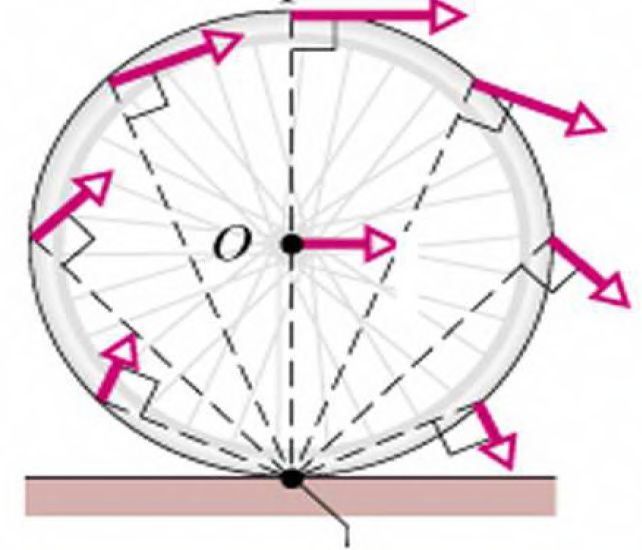
Moto di puro rotolamento Il moto roto-traslazione è equivalente ad una rotazione pura (senza traslazione) ma attorno al punto istantaneo di contatto (C in figura) Dim: Da quanto visto finora = + × e per il punto C di contatto vale = + × = 0 Consideriamo un qualunque punto P della circonferenza = − 0 = − = + × − + × = × − = × = × ′ avendo indicato con ′ = il raggio vettore che individua il punto P generico a partire da quello di contatto (fermo). Quindi abbiamo dimostrato che il puro rotolamento equivale ad una rotazione pura attorno al punto di contatto e con la stessa velocità angolare ω di rotazione attorno al CM. Quindi le velocità dei punti della ruota saranno quelle indicate da questa figura senza P la necessità di comporre vettorialmente i due moti come nelle generiche roto-traslazioni. C
Corpo che rotola sul piano orizzontale - Esempio I (polo CM) Vediamo la dinamica del corpo di massa m e raggio r che fa puro rotolamento sul piano orizzontale sotto l’azione di una forza F orizzontale. Per il CM si ha: + + = la reazione R del piano ha sia una componente normale che una tangenziale (che è l’attrito statico) ∶ − = ∶ − =0 a cui va aggiunto il T. del momento angolare scegliendo il CM come polo (O): = × = = = Ricavando f e sostituendo nella eq. della x: = = 2 1+ 1+ 2 Naturalmente essendo f una forza di attrito statico deve necessariamente verificarsi 2 ≤ = ⟹ 2 ≤ ⟹ ≤ 1 + 1+
Corpo che rotola sul piano orizzontale - Esempio I (polo C) Sempre come prima la forza F orizzontale, ma il conto lo rifacciamo rispetto al punto di contatto C (il moto equivale ad una rotazione pura rispetto a C): ∶ − = ∶ − =0 = × = ⟹ = T. di Huygens-Steiner sul momento di inerzia: = + 2 2 2 = + = + = + ⟹ = 2 1 + 2 Sostituendo nella equazione della x: = 2 1+ stesso risultato di prima. In alcuni esercizi può rappresentare una comoda scorciatoia per i calcoli
Corpo che rotola sul piano orizzontale - Esempio II Il moto di una ruota si può anche ottenere tramite un motore che imprime una rotazione alla ruota tramite un momento ( in figura) invece di applicare una forza F. Le equazioni del moto diventano: Moto del CM: + P = T. Momento angolare (O): + × = da cui si ottengono le relazioni scalari: ∶ − =0 ∶ = − = da cui si ottiene = = 1+ 1+ 2 2 La cosa importante è che mentre nell’esempio di prima f si opponeva alla forza F, in questo esempio f favorisce il moto, anzi provoca l’accelerazione del CM, ma il suo momento si oppone al momento del motore. Pertanto nei casi generali nel rotolamento non possiamo immediatamente a priori indicare il verso della forza di attrito (si guarda al segno della soluzione). ≤ = ⟹ ≤ ⟹ ≤ 1 + 2 1+ 2
Riepilogo rotolamento Ogni qualvolta si parla di rotolamento negli esercizi, si intende un puro rotolamento e nel costruire il diagramma delle forze (diagramma di corpo libero) bisogna sempre aggiungere una forza di attrito perché è la forza di attrito a realizzare la condizione di rotazione pura sul punto di contatto C ( = 0). Il verso della forza di attrito si può ragionevolmente stabilire nei due casi fondamentali illustrati di seguito, ma in ogni caso il valore è incognito per cui segno (verso) e valore sono determinati solo con la soluzione del problema. Esempio 1 (piano inclinato) Situazione in cui non risultano esserci momenti di forze esterne rispetto al CM: in questo caso è la forza di attrito a determinare il momento rotatorio; il verso è quindi indicato dalla rotazione del corpo.
Riepilogo rotolamento Esempio 2 (piano inclinato) Situazione con una tensione T dovuta ad una fune applicata nel CM. Non vi sono momenti di forze rispetto al CM. Anche in questo caso è l’attrito a determinare la rotazione, il verso della rotazione è quello che determiniamo imponendo che sia fermo il punto di contatto C.
Riepilogo rotolamento Esempio 3 (piano inclinato) Situazione in cui risultano a priori dei momenti di forze esterne rispetto al CM: la fune non è applicata nel CM e pertanto produce un momento; In questo caso la forza di attrito produce un momento di verso opposto, il verso è quindi opposto agli altri momenti Altre situazioni sono più complesse per cui si sceglie un verso per la forza di attrito e si ricava il segno dai conti.
Riepilogo rotolamento Infine dal diagramma delle forze si scrivono le equazioni della dinamica: = = = con l’aggiunta della condizione di puro rotolamento | | = | | Questa condizione la risolviamo con la seguente regola pratica: • si sceglie il verso di rotazione intuitivo secondo la direzione del moto e lo si considera positivo se è positivo nel verso del moto (o comunque concordi tra loro); • se α e sono stati scelti concordi tra loro allora = + • i momenti delle forze devono seguire la stessa convenzione; • semplifichiamo subito il sistema scrivendolo come due eq. in due incognite. • Negli esercizi con i fili va poi considerato il collegamento tra gli oggetti usando l’inestensibilità del filo che li collega. • In alternativa, se si scelgono gli assi x-y come più opportuni, si considera come verso positivo dei momenti (asse-z) quello corrispondente al verso antiorario
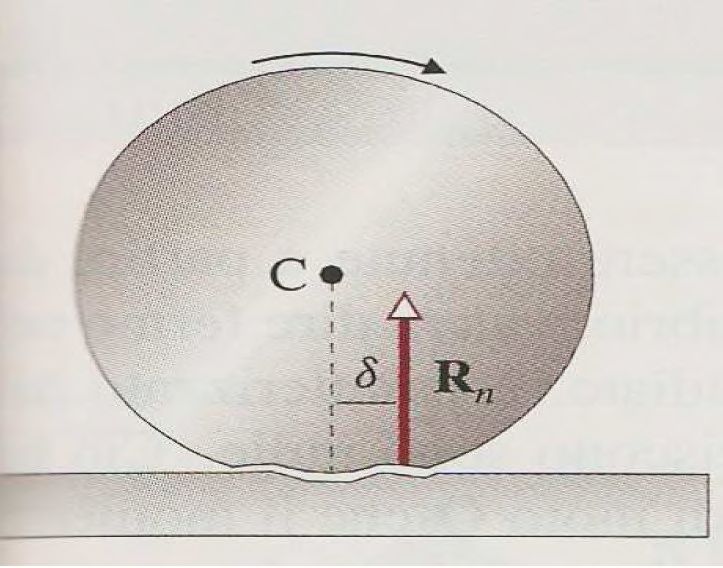
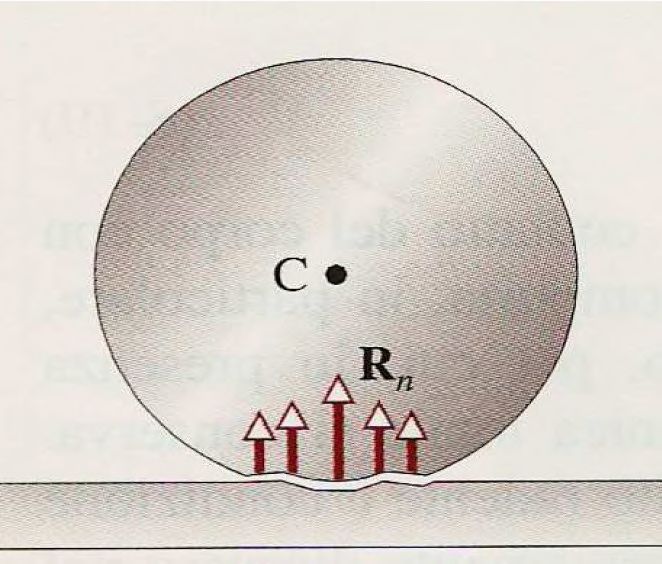
Conservazione energia - attrito volvente Al moto del puro rotolamento, quando agiscono forze conservative, si può applicare la conservazione dell’energia meccanica, in quanto la forza di attrito pur essendo non nulla, agisce su un punto fermo per cui il suo lavoro è nullo. Nonostante ciò, sperimentalmente un corpo che rotola tende a rallentare, a causa di un’altra forma di attrito (che trascureremo negli esercizi) che viene detta attrito volvente. Quello che succede è che se non ci fossero deformazioni il momento dovuto alla reazione normale verrebbe nullo, nella situazione reale si hanno invece deformazioni sia del piano che dell’oggetto che rotola, facendo si che su una superficie più estesa avvenga il reale contatto (vedi figura) causando l’apparizione anche di un momento di forze delle reazioni vincolari, che sono nulle se il corpo è fermo, ma sono negative (producendo un rallentamento della rotazione) ad oggetto in rotolamento.
Conservazione energia - attrito volvente La schematizzazione che si può fare è quella che si può intuire dalla figura e assumendo un campo di forze parallele: il momento risulterà del tipo = con δ coefficiente di attrito volvente che dipenderà dal materiale che costituisce le superfici di contatto. (Esempio: = 5 ∙ 10−5 ; = 0.2)
Rotolamento sul piano inclinato Consideriamo che una sfera (o un cilindro) sia sul piano inclinato che rotoli senza strisciare (puro rotolamento). Scegliamo inoltre gli assi in modo da avere e positivi (asse x verso il basso):
Esempio 7.10 - Rotolamento sul piano inclinato A queste equazioni va aggiunta la condizione di rotolamento: = × e tenendo conto che quando > 0 si ha > 0 (per nostra scelta di orientazione di assi), la condiz. di rotolamento diventa = + sostituendo questa nella terza eq. otteniamo: = + = + 2 ottenuta questa eq. per la sostituiamo nella (1) ottenendo: sin + sin − 2 = ⟹ = + 2 che è la soluzione. NB l’espressione della è venuta positiva perché abbiamo scelto il verso corretto già nel diagramma delle forze. Ricordiamo alcuni momenti 1 di inerzia: = 2 2 per disco e cilindro pieno; = 2 per un anello; 2 = 2 per la sfera. 5
Rotolamento sul piano inclinato (2) Stessa figura precedente, ma siamo interessati solo all’approccio ”energetico”, tenendo presente che l’attrito nel rotolamento puro NON compie lavoro: Conservazione dell’energia meccanica (assumendo che al tempo t=0 il corpo rigido è in quiete) = Per l’Energia cinetica utilizziamo il T. di Konig. 1 2 1 ℎ = + 2 2 2 2 1 2 1 ℎ = + 2 2 2 per cui la velocità del corpo partendo da una quota h è 2 ℎ = 1+ 2
Rotolamento su piano inclinato (3) Il verso della forza di attrito è tale da impedire lo slittamento quindi anche in questo caso opposta al moto. Le eq. risultanti sono: scegliamo inoltre gli assi in modo da avere e α positivi:
Yo-yo In questo esempio la tensione del filo fornisce il momento necessario alla rotazione: Ricevimento ogni mercoledì h15.00 →17.00 (modalità remota). É necessario prenotare il ricevimento inviando una mail.
Puoi anche leggere