UNIVERSITÀ DEGLI STUDI DI CAGLIARI - Corsi
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

UNIVERSITÀ DEGLI STUDI DI CAGLIARI FACOLTA’ DI INGEGNERIA E ARCHITETTURA Dipartimento di Ingegneria Elettrica ed Elettronica Prestazioni delle Unità di Misura Fasoriali in presenza di segnali modulati. Laureando: Alberto Zucca Relatrice: Ing. Sara Sulis Correlatore: Ing. Paolo Castello Anno Accademico 2016/2017
INDICE INTRODUZIONE 1 1 SEGNALE TEORICO ED ERRORE DI MISURA 3 1.1 Input teorico per i test di conformità 4 1.2 Input teorico per le prove svolte 8 1.3 Segnali di riferimento 12 2 SISTEMA DI MISURA 14 2.1 Generatore di segnale 15 2.2 Generatore dati di riferimento 16 3 PROVE E RISULTATI 23 3.1 Prove con modulazione sinusoidale di ampiezza 25 Configurazione 1: Classe M con Fs=10Hz 25 Configurazione 2: Classe M con Fs=25Hz 29 Configurazione 3: Classe M con Fs=50Hz 33 Configurazione 4: Classe P con Fs=10Hz 36 Configurazione 5: Classe P con Fs=25Hz 40 Configurazione 6: Classe P con Fs=50Hz 43 Configurazione 7: Classe P con Fs=100Hz 46 3.2 Prove con modulazione rettangolare di ampiezza 48 3.3 Valutazione in funzione di fmax(TVE 3%) e fmin(TVE 3%) 50 CONCLUSIONI 55 Bibliografia 56
INTRODUZIONE Lo scopo di questo lavoro di tesi è valutare il comportamento delle unità di misura fasoriali, le cosiddette Phasor Measurement Unit, PMU, in presenza di segnali non convenzionali. In particolare si analizzerà il comportamento di tre PMU commerciali in funzione della loro risposta a segnali elettrici modulati, che sono atipici rispetto a quelli attesi dalle PMU nelle applicazioni standard sviluppate per i sistemi di trasmissione, ma interessanti per eventuali applicazioni di questi dispositivi sulle reti elettriche di distribuzione. Una PMU è uno strumento di misura elettronico in grado di misurare, con una frequenza detta “reporting rate” molto alta, Fasore (Modulo e Fase), Frequenza e ROCOF (Rate Of Change Of Frequency) di un segnale elettrico in un determinato istante. Questo istante di tempo è riportato come informazione nel “timestamp” associato alla misura. Questa associazione è resa possibile dal fatto che le PMU, tramite un ricevitore GPS (Global Positioning System), ricevono il segnale temporale UTC (Coordinated Universal Time). La ricezione del segnale UTC permette anche la sincronizzazione temporale fra le misure fatte da diverse PMU nella stessa rete. In questo modo si possono confrontare dei fasori misurati nello stesso istante di tempo. Per essere messe in commercio, le PMU devono dimostrarsi conformi agli attuali standard IEEE C37.118.1-2011 e IEEE C37.118.1a-2014, superando i test in questi descritti, e svolti seguendo anche i passi indicati nella guida IEEE C37.242-2013. I test di conformità di questi standard sono stati ideati partendo dal presupposto che le PMU siano destinate ad essere installate nelle reti di trasmissione, quindi con lo scopo di verificare che le PMU rispondano adeguatamente ai segnali attualmente dominanti in queste reti. Per motivi tecnico/economici le PMU non sono attualmente utilizzate per monitorare le reti di distribuzione, che, avendo molti più nodi rispetto a quelle di trasmissione, richiederebbero un numero molto maggiore di Unità; tuttavia si prevede che per gestire in modo efficiente le reti elettriche di prossima generazione si assisterà all’utilizzo delle PMU anche a livello di distribuzione. In questo contesto si colloca questo lavoro di tesi, il cui scopo è, come detto, testare il funzionamento di questi dispositivi così avanzati in presenza di segnali non ancora previsti dagli standard. I test effettuati per questa tesi sono quindi differenti da quelli di conformità, e il loro svolgimento è giustificato da due ipotesi: 1) Un utilizzo futuro delle PMU nelle reti di distribuzione. 2) Una evoluzione delle reti di potenza tale per cui si manifestino, in alta tensione, segnali sinora tipici solamente delle reti di distribuzione. 1
Per questo motivo i segnali scelti per la caratterizzazione delle PMU in esame simulano un fenomeno frequente al livello di distribuzione: il “Light Flicker”, ovvero una fluttuazione del valore efficace della tensione dovuta all’inserimento o al distacco di grossi carichi. Come conseguenza le PMU sono state quindi sottoposte a modulazioni a frequenze variabili, con valori anche lontani dalle frequenze previste nei test di conformità. Nel primo capitolo del lavoro sono descritti, paragonandoli a quelli previsti dallo standard, i segnali teorici usati nei test; nel secondo capitolo è descritto il sistema di misura utilizzato; infine, nel terzo capitolo, vengono analizzati e discussi i risultati delle prove effettuate nel laboratorio di misure elettriche ed elettroniche dell’Università degli Studi di Cagliari. 2
Capitolo 1 – SEGNALE TEORICO ED ERRORE DI MISURA In questo capitolo saranno analizzate le caratteristiche dei segnali analogici che costituiranno l’ingresso alle PMU nel corso delle prove svolte per caratterizzare il comportamento di questi dispositivi; quindi si evidenzieranno le differenze fra questi e quelli previsti, per lo stesso tipo di test, dallo standard IEEE C37.118.1-2011 [1]. Gli standard impongono un limite di errore per ogni tipo di misura effettuata dalle PMU in diverse condizioni operative. Ad una PMU, durante questi test, è quindi concesso di commettere un certo errore nel calcolare modulo, fase, frequenza e ROCOF. L’entità dell’errore è complessivamente espressa da tre indici, anche questi definiti nello standard [1]: 1. Il TVE [%] (Total Vector Error). È una espressione della differenza fra il sincrofasore “vero” e quello stimato dall’unità sotto test, nello stesso istante di tempo. È definito matematicamente dall’equazione 1.1. Il valore del TVE è espresso in percentuale rispetto al fasore teorico. 2. Il FE [Hz] (Frequency Error). È il valore assoluto della differenza fra la frequenza “vera” e la frequenza misurata, nello stesso istante di tempo. È definito matematicamente dall’equazione 1.2. 3. Il RFE [Hz/s] (Rate of change of Frequency Error). È il valore assoluto della differenza fra il ROCOF “vero” e il ROCOF misurato, nello stesso istante di tempo. È definito matematicamente dall’equazione 1.3. ( ̂ ( ) − ( ))2 + ( ̂ ( ) − ( ))2 %( ) = 100 × √ (1.1) ( ( ))2 + ( ( ))2 ( ) = | − | = |∆ − ∆ | (1.2) ( ) = |(d ⁄d ) − (d ⁄d ) | (1.3) Nell’equazione 1.1, ̂ ( ) e ̂ ( ) sono rispettivamente I valori della parte reale e della parte immaginaria dell sincrofasore stimato dalla PMU in riferimento all’istante di tempo 3
( ), mentre ( ) e ( ) sono quelli del sincrofasore di riferimento del segnale in ingresso, nello stesso istante di tempo. I limiti sull’errore si traducono quindi in tre limiti su TVE, FE e RFE da non superare. Questi, aggiornati l’ultima volta con l’emendamento del 2014 [2], sono detti “limiti di conformità”, e possono essere più o meno severi in funzione dalla classe di prestazione della PMU, che può essere Protezione (P) o Misura (M), del reporting rate Fs impostato, e del tipo di prova. 1.1 Input teorico per i test di conformità Per motivi che saranno chiariti in seguito, I’input teorico scelto per le prove è un segnale sinusoidale, alla frequenza di rete, modulato in ampiezza, che può essere descritto genericamente dall’equazione 1.4. ( ) = × cos(2 0 + ) × (1 + ( )) (1.4) Dove e sono rispettivamente modulo e fase del segnale alla frequenza fondamentale 0 , e ( ) è la forma d’onda modulante. Figura 1.1 – Visualizzazione di un segnale stazionario e dello stesso segnale modulato in ampiezza Un segnale di questo tipo è costante nella frequenza, ma ha un modulo che varia in funzione del tempo. Questo è mostrato in figura 1.1, nella quale è rappresentato il confronto fra un segnale stazionario (linea blu) e lo stesso segnale modulato in ampiezza (arancione), tramite una funzione periodica ( ) descritta di seguito. Fra i vari test di conformità descritti nello standard [1] ci sono dei test da effettuare con segnali modulati in ampiezza, i quali prevedono che ( ) sia una cosinusoide. ( ) = × cos(2 ) (1.5) 4
Di conseguenza i segnali teorici usati nei test di conformità sono descritti dalle seguenti equazioni. ( ) = × cos(2 0 + ) × (1 + × cos(2 )) (1.6) ( ) = [ × cos(2 0 + )] + [ × cos(2 0 + ) × × cos(2 )] (1.7) dove è chiamato “fattore di modulazione” e è la “frequenza di modulazione” (o “frequenza modulante”). Lo spettro bilatero del segnale definito dall’equazione 1.7 presenta due impulsi dovuti al primo termine, in corrispondenza di f0 e -f0, e quattro dovuti al secondo termine, in corrispondenza di f0+fm, f0-fm, -f0+fm e -f0-fm. Sia per le prove studiate per questa tesi che per quelle previste dallo standard [1] la frequenza di modulazione fm è sempre inferiore alla fondamentale f0, quindi, passando allo spettro unilatero, si vedranno solo tre impulsi in corrispondenza di f0, f0+fm e f0-fm, che sono le frequenze delle tre componenti del segnale. La banda passante di una PMU, la cui larghezza dipende dall’algoritmo di misura utilizzato, è centrata su f0, quindi la componente alla frequenza fondamentale è percepita appieno. La qualità delle misure, e in particolare il TVE, dipende allora in gran parte dalla forma della banda passante e dalla posizione nello spettro delle altre due componenti in frequenza rispetto ad essa, quindi dalla frequenza di modulazione. I valori che e devono assumere nei test di conformità con segnali modulati si possono ricavare dalle tabelle 1.1 e 1.2, estratte dallo standard [2], e dai passi da seguire per l’esecuzione delle prove con segnali modulati, specificati dallo standard IEEE C37.242- 2013 [3], che sono i seguenti: a) iniziare con il segnale modulato in ampiezza e fase con una frequenza di modulazione fm = 0.1 Hz; b) aspettare che il segnale si stabilizzi; c) prelevare l’uscita della PMU per almeno due cicli di modulazione; d) calcolare il massimo valore di TVE, FE, RFE; e) incrementare la frequenza di modulazione di 0.2 Hz; f) ripetere i passi da b) a e) fino a raggiungere l’estremo superiore del range di frequenze; g) confrontare i risultati coi limiti prescritti dagli standard [1] e [2]; h) ripetere l’intero test applicando al segnale la sola modulazione di fase. Come si vede dai passi specificati dalla guida [3] e dalla tabella 1.1, fra i test di conformità sono presenti anche quelli con modulazione di fase, a questi però, come ad altri test previsti dalla normativa, non sarà fatto riferimento in questa tesi. 5
Il reporting rate di una PMU deve essere necessariamente uguale a un sottomultiplo o a un multiplo della frequenza di rete 0 , che può essere 50Hz o 60Hz. I test in laboratorio sono stati eseguiti con 0 =50Hz, quindi fra le righe della tabella 1.2 si farà riferimento solo a quelle relative ai reporting rate sottomultipli di 50Hz. Minimum range of influence quantity over which PMU shall be within given limits Modulation Reference P class M class Level Condition Max Max Range Range TVE% TVE% Modulation Modulation 100% rated frequency frequency Kx=0.1 signal Modulation magnitude, 0.1 to lesser 3% 0.1 to lesser 3% Ka=0 of Fs/10 or 2 of Fs/5 or 5 fnominal. Hz. Hz. Modulation Modulation 100% rated frequency frequency Kx=0 signal Modulation magnitude, 0.1 to lesser 3% 0.1 to lesser 3% Ka=0.1 of Fs/10 or 2 of Fs/5 or 5 fnominal. Hz. Hz. Note: Frequency and ROCOF follow the modulated signal and measure the combined effects of the fundamental signal and the modulation. The errors in both measurements are a small fraction of the measured values, but since ROCOF becomes a large value, the expected error is also large. Tabella 1.1 – Test di conformità con segnali modulati - Parametri per la costruzione dei segnali teorici e limiti sul TVE. Kx è sempre uguale a 0.1 (il modulo arriva a discostarsi del 10% dal suo valore nominale), e fm, partendo da 0.1Hz e compiendo salti di 0.2Hz fra una prova e l’altra, arriva a un valore massimo Fr che dipende dalla classificazione (classe e reporting rate) della PMU che si vuole testare. 6
Frequency and ROCOF performance limit Reporting rate P class M class Fs(Hz) Max FE Max RFE Max FE Max RFE Fr(Hz) Fr(Hz) (Hz) (Hz/s) (Hz) (Hz/s) 10 1 0.03 0.6 2 0.12 2.3 12 1.2 0.04 0.8 2.4 0.14 3.3 15 1.5 0.05 1.3 3 0.18 5.1 20 2 0.06 2.3 4 0.24 9.0 25 2 0.06 2.3 5 0.30 14 30 2 0.06 2.3 5 0.30 14 50 2 0.06 2.3 5 0.30 14 60 2 0.06 2.3 5 0.30 14 Note: Maximum frequency (Fr) in the modulation test range is determined by the reporting rate and capped to 2 Hz or 5 Hz for the P and M class respectively. Tabella 1.2 - Test di conformità con segnali modulati – Limiti sul FE e sul RFE. Nelle tabelle 1.1 e 1.2 sono riportati anche i limiti di conformità, che devono essere rispettati per frequenze di modulazione minori o uguali a Fr. Quindi perché una PMU venga messa in commercio deve essere in grado di stimare accuratamente segnali con componenti a frequenze comprese fra f0-Fr e f0+Fr. Sulla larghezza della banda passante delle PMU di classe M viene anche imposto un limite uguale al suo reporting rate, finalizzato a garantire il filtraggio di quelli che si suppone siano disturbi. Gli algoritmi di misura utilizzati da queste PMU sono allora strettamente dipendenti dal reporting rate. Figura 1.2 – Risposta in frequenza di una PMU di classe M 7
Figura 1.3 – Risposta in frequenza di una PMU di classe P I range rossi nelle figure 1.2 e 1.3 racchiudono le frequenze al di fuori della banda passante di una PMU. La banda passante è invece divisibile in due zone, quella di modulazione (zona verde) e quella di transizione (grigia). I test di conformità prevedono che le PMU siano sottoposte solo a frequenze contenute nell’area di modulazione. Alle PMU di classe P non sono imposti vincoli sulla banda passante perché non si ritiene fondamentale che siano capaci di filtrare i disturbi, quindi, quando le PMU P vengono messe in commercio, non viene comunemente data come informazione il range di frequenze della loro area di transizione. 1.2 Input teorico per le prove svolte Volendo valutare il comportamento delle PMU sottoposte a segnali tipici delle reti di distribuzione, si è scelto di fare riferimento alla norma sulla compatibilità elettromagnetica, CEI EN 61000, parte 4 sezione 15 [4], e ai segnali in essa descritti. Nella norma è specificato che il fenomeno del flicker può essere simulato tramite una modulazione di ampiezza, utilizzando opportune frequenze modulanti; ed è per questo che i test sono stati eseguiti con segnali dinamici di questo genere. Nella norma [4] si fa riferimento a due tipi di modulazione di ampiezza per simulare le fluttuazioni di tensione: 1) Modulazione sinusoidale 2) Modulazione rettangolare Nel primo caso, la funzione modulante ( ) è ancora quella di equazione 1.5; nel secondo caso, è quella di equazione 1.8. 1 ( ) = × × sign(sin(2 )) (1.8) 2 In figura 1.4 è rappresentato il confronto fra un segnale stazionario (linea blu) e lo stesso segnale modulato in ampiezza (arancione) tramite una generica onda rettangolare. Il segnale dinamico così ottenuto è stazionario a tratti. 8
Figura 1.4 – Visualizzazione di un segnale stazionario e dello stesso segnale modulato in ampiezza tramite onda rettangolare Rispetto alla modulazione sinusoidale, quella rettangolare comporta l’introduzione di un numero molto maggiore di componenti in frequenza, idealmente infinito. Infatti, secondo Fourier, un’onda quadra corrisponde alla sommatoria di infinite sinusoidi, ognuna ad una frequenza diversa e multipla della frequenza fondamentale. Questo vuol dire che le componenti in frequenza iniettate da questa modulazione sono f0±fm, f0±2fm, f0±3fm, f0±4fm e così via. Nella stessa norma [4] sono indicati i valori di da adottare per simulare il flicker, e i relativi valori di , espressi questa volta come massima variazione percentuale dell’ampiezza (∆ ⁄ (%)). Nel caso di modulazione sinusoidale questi sono riportati in tabella 1.3, e nel caso di modulazione rettangolare in tabella 1.4. I valori di in queste tabelle sono stati definiti in modo da ottenere un effetto visivo che si mantiene il più possibile costante al variare delle frequenze di modulazione; tuttavia, dato che lo scopo delle prove effettuate per questo lavoro è principalmente quello di valutare la risposta delle PMU alla variazione di , è stato mantenuto costante e pari a 0.1, come nei test di conformità. L’ampiezza della componente stazionaria è stata impostata uguale a √2 × 50 , quindi i due tipi di segnale mandati in ingresso al dispositivo in esame sono rappresentati dalle equazioni 1.9 e 1.10: 1 ( ) = [√2 × 50 × cos(2 0 + )] (1.9) + [√2 × 50 × cos(2 0 + ) × 0.1 × sin(2 )] 2 ( ) = [√2 × 50 × cos(2 0 + )] 1 (1.10) + [√2 × 50 × cos(2 0 + ) × 0.1 × × sign(sin(2 ))] 2 9
Voltage fluctuation ∆U/U (%) Voltage fluctuation ∆U/U (%) Hz 120 V lamp 230 V lamp Hz 120 V lamp 230 V lamp 50 Hz system 50 Hz system 50 Hz system 50 Hz system 0.5 2.453 2.325 10 0.341 0.261 1 1.465 1.397 10.5 0.355 0.271 1.5 1.126 1.067 11 0.373 0.283 2 0.942 0.879 11.5 0.394 0.298 2.5 0.815 0.747 12 0.417 0.314 3 0.717 0.645 13 0.469 0.351 3.5 0.637 0.564 14 0.528 0.393 4 0.570 0.497 15 0.592 0.438 4.5 0.514 0.442 16 0.660 0.486 5 0.466 0.396 17 0.734 0.537 5.5 0.426 0.357 18 0.811 0.590 6 0.393 0.325 19 0.892 0.646 6.5 0.366 0.300 20 0.978 0.704 7 0.346 0.280 21 1.068 0.764 7.5 0.332 0.265 22 1.162 0.828 8 0.323 0.256 23 1.261 0.894 8.8 0.321 0.250 24 1.365 0.964 9.5 0.329 0.254 25 1.476 1.037 33 ⅓ 3.111 2.128 Tabella 1.3 – Parametri per il segnale modulante sinusoidale. 10
Voltage fluctuation ∆U/U (%) Voltage fluctuation ∆U/U (%) Hz 120 V lamp 230 V lamp Hz 120 V lamp 230 V lamp 50 Hz system 50 Hz system 50 Hz system 50 Hz system 0.5 0.597 0.509 11.5 0.308 0.233 1 0.547 0.467 12 0.325 0.245 1.5 0.503 0.429 13 0.363 0.272 2 0.468 0.398 14 0.413 0.308 2.5 0.438 0.370 15 0.460 0.341 3 0.420 0.352 16 0.511 0.376 3.5 0.408 0.342 17 0.562 0.411 4 0.394 0.332 18 0.611 0.446 4.5 0.372 0.312 19 0.683 0.497 5 0.348 0.291 20 0.768 0.553 5.5 0.323 0.268 21 0.811 0.585 6 0.302 0.248 21.5 0.820 0.592 6.5 0.283 0.231 22 0.852 0.612 7 0.269 0.216 23 0.957 0.680 7.5 0.259 0.207 24 1.052 0.743 8 0.253 0.199 25 1.087 0.764 8.8 0.252 0.196 25.5 1.148 0.806 9.5 0.258 0.199 28 1.303 0.915 10 0.265 0.203 30.5 1.144 0.847 10.5 0.278 0.212 33 ⅓ 2.443 1.671 11 0.293 0.222 Tabella 1.4 – Parametri per il segnale modulante rettangolare. 11
Ogni PMU è stata sottoposta ad una terna di tensioni simmetriche in una serie di 78 prove che saranno meglio descritte nel capitolo 2. Per le prime 37 è stato usato come ingresso 1 ( ), con che, cambiando ad ogni prova, ha assunto sequenzialmente tutti i valori indicati in tabella 1.3. Per le restanti 41 è stato usato come ingresso 2 ( ), con che, cambiando ad ogni prova, ha assunto sequenzialmente tutti i valori indicati in tabella 1.4. La fase rimane costante in tutte le prove, ma è ovviamente l'elemento che differenzia i tre segnali di fase che devono essere mandati contemporaneamente in ingresso alla PMU: vale quindi rispettivamente 0, -⅔∙π e ⅔∙π nel primo, nel secondo e nel terzo canale. Nell’ottica di validare il comportamento delle PMU, nonostante i segnali di test in ingresso ai dispositivi presentino delle grosse differenze rispetto a quelli previsti dai test di conformità, si farà comunque riferimento ai limiti su TVE, FE e RFE imposti dallo standard [1]. 1.3 Segnali di riferimento I limiti di conformità riguardano gli indici di errore valutati dal confronto fra le misure riportate dal dispositivo e i valori assunti dal segnale di riferimento, teoricamente identico a quello dinamico mandato in ingresso alla PMU. Questo tipo di test, si è detto, è fatto perché si ritiene che le modulazioni dei segnali usati in questi test saranno con probabilità presenti nei segnali delle reti di nuova generazione alle quali sono destinate le PMU. L’obiettivo è quindi quello di considerare questi in esame come segnali di interesse, che devono essere valutati accuratamente, con la dinamica del segnale seguita puntualmente dai dispositivi in esame. Se, al contrario, il segnale modulante ( ) fosse considerato un disturbo, la sua percezione da parte della PMU dovrebbe essere considerata un errore. In questo caso, gli indici di errore dovrebbero essere calcolati rispetto a un segnale di riferimento, come quello di equazione 1.11, teoricamente uguale a quello di ingresso ma privo della componente modulante, e quindi stazionario. ( ) = √2 × 50 × cos(2 0 + ) (1.11) Nel caso delle prove svolte in laboratorio, che verranno discusse dettagliatamente in seguito, si vedrà che lo scopo non è solamente quello di verificare che alcuni segnali specifici siano misurati correttamente o filtrati sufficientemente. 12
I segnali modulanti usati nelle prove introducono anche componenti in frequenza che cadono all’interno dell’area di transizione della banda passante delle PMU. Lo scopo è quindi anche quello di scoprire quali, fra queste modulazioni, siano considerate disturbi, quali non lo siano e quali stiano “nel mezzo”, mediante indici di errore che sono stati calcolati sia sul riferimento dinamico che sul riferimento stazionario. Nel caso delle PMU di classe P, si vuole capire anche quanto sia estesa l’area di transizione. Per valutare il comportamento di una PMU, i massimi indici di errore ottenuti prova per prova saranno riportati graficamente insieme ai relativi limiti di conformità. In questo modo saranno costruite le curve “TVEmax”, “FEmax”, “RFEmax” e “limite”. Nelle ordinate ci saranno gli indici di errore, nelle ascisse le frequenze modulanti che caratterizzano i test. Il TVEmax calcolato sul riferimento dinamico sarà chiamato “TVEdynamic”, quello sul riferimento stazionario “TVEs.s.”. L'aumentare della frequenza modulante comporta che le componenti in frequenza introdotte da ( ) si allontanino dal centro della banda passante della PMU; e quindi che lo strumento percepisca sempre meno la modulazione e sempre più un segnale stazionario. Di conseguenza ci si aspetta un TVEdynamic crescente, e un TVEs.s. con una forma dipendente dalla banda passante della PMU, quindi decrescente. Considerato che, nella prova specifica, il valore efficace dell’ingresso dinamico può arrivare a differenziarsi del 10% da quello del corrispondente segnale stazionario, e che non è presente modulazione di fase, entrambi i TVEmax non dovrebbero raggiungere valori di picco molto distanti dal 10%. Per quanto riguarda i FEmax e i RFEmax, non si possono fare ipotesi sui loro valori, se non che rimarranno invariati in funzione del riferimento utilizzato. Su ogni grafico di TVEmax, sarà individuata la massima fm entro la quale il TVEdynamic resta al di sotto del limite (3% per ogni configurazione), e sarà chiamata “fmax(TVE 3%)”; quindi, considerando questa frequenza, saranno individuati i corrispondenti FE e RFE per verificare che rispettino i relativi limiti. Normalmente, verificare che FE e RFE rispettino i limiti per una determinata frequenza modulante non dimostra che i limiti siano rispettati anche per frequenze più basse; ma nei casi presi in esame si vedrà che questi due indici di errore o sono sempre al di sotto dei limiti o crescono insieme a fm. Nonostante il limite del 3% imposto dallo standard riguardi il TVEdynamic, è utile confrontare tale valore anche col TVEs.s. Questo allo scopo di trovare la fm a partire dalla quale la PMU filtra pesantemente il segnale ed è sul punto di non percepire più la modulazione, cioè la più bassa fra le frequenze associate ad un TVEs.s. inferiore al 3%. Questa sarà chiamata “fmin(TVE 3%)”. Anche in questo caso verrà fatta la verifica sui FE e RFE corrispondenti. 13
CAPITOLO 2 – Sistema di misura In questo capitolo si descriverà brevemente la catena di misura necessaria per acquisire ed elaborare i segnali di interesse; in particolare si evidenzieranno due dei suoi componenti: 1) Il generatore di segnale (GS), il calibratore del sistema; 2) il generatore software, un programma usato come mezzo di confronto per l’elaborazione dei dati. In Figura 2.1 è raffigurato lo schema di generazione e misura impiegato per le prove discusse in questa tesi. Figura 2.1 – Schema di generazione e misura Il GS produce un segnale analogico, nel dominio del tempo, quanto più possibile uguale a quello che gli viene richiesto, ma comunque differente a causa di diverse sorgenti di incertezza. Questo segnale viene mandato in ingresso alla PMU, la quale, introducendo a sua volta determinate sorgenti di incertezza, ne calcola il fasore in determinati tempi, e lo rende disponibile in uscita sotto forma digitale. Il generatore software è programmato per generare la serie di fasori che uno strumento di misura “ideale” calcolerebbe se acquisisse effettivamente il segnale richiesto teorico nel dominio del tempo senza sorgenti di incertezza. Il problema dell’adoperare una catena di misura di questo tipo sta nel fatto che non è sostanzialmente possibile separare l’errore introdotto dalla PMU da quello introdotto dal GS. Per valutare le prestazioni di una PMU che acquisisce segnali di questo tipo è quindi necessaria una fase di valutazione del calibratore, finalizzata a valutare se questo introduca un errore trascurabile, così da poter attribuire l’incertezza del risultato alla PMU, senza penalizzarla eccessivamente. 14
2.1 Generatore di segnale Lo strumento nella disponibilità del laboratorio di misure elettriche ed elettroniche dell’Università degli Studi di Cagliari è il modello CMC 256plus della ditta Omicron [5]. Questo generatore è in grado di generare segnali di potenza sincronizzati in quanto è in grado di sincronizzare i segnali stessi mediante un ricevitore GPS. È riconosciuto come dispositivo adatto per applicazioni che richiedono un alto livello di accuratezza di sincronizzazione, come ad esempio la calibrazione di vari apparecchi di misura, fra i quali anche le PMU. Il GS è in grado di generare sei canali di uscita dedicati alle correnti e quattro alle tensioni; questi segnali possono essere continuamente regolati, indipendentemente gli uni dagli altri, in ampiezza, fase e frequenza. In particolare, i segnali generati per i test sono tre tensioni. Dalla scheda tecnica del generatore risulta che l’errore che il generatore di tensione può commettere sull’ampiezza, in condizioni nominali, è tipicamente inferiore allo 0.015% del valore letto più lo 0.005% del range selezionato, che può essere 150V o 300V; l’errore che può commettere sulla fase è tipicamente inferiore a 0.005°; mentre l’errore di sincronizzazione è tipicamente inferiore a 1μs (contribuisce al massimo ad un incremento del TVE dello 0.03%). La tensione scelta per effettuare le prove ha mediamente il valore efficace di 50V e il range di tensioni (fondo scala) scelto per le prove è 150V. In questo caso, l’errore medio introdotto dal generatore di tensione sull’ampiezza risulta quindi, secondo specifica Omicron, inferiore a: 0.00015 × 50 + 0.00005 × 150 = 0.015 . Il contributo dato dal generatore all’errore di fase è 0.005°, quindi nel TVE ha un peso trascurabile rispetto a quello dato, dal generatore, all’errore di modulo, che è mediamente non superiore a: 0.015⁄50 × 100 = 0.03%. Il segnale generato dal GS può essere quindi rappresentato anche da un riferimento ideale generato tramite software. 15
2.2 Generatore dati di riferimento Per generare il segnale di riferimento ed analizzare i dati in uscita dalle PMU in corrispondenza dei fasori “ideali” è stato utilizzato un programma sviluppato in ambiente LabVIEW (Laboratory Virtual Instrument Engineering Workbeanch). Programmi di questo tipo sono anche detti VIs (Virtual Instruments). I VI sono costituiti principalmente da due parti: 1) il pannello frontale, con cui si interfaccia l’utente; 2) il diagramma a blocchi, con cui si interfaccia il programmatore. Questo VI consente di elaborare e visualizzare, sia in forma grafica che in forma numerica, le misure effettuate da una PMU e di confrontarle una per una con i fasori di rifermento aventi lo stesso riferimento temporale, il cosiddetto time-stamp, acquisito come detto tramite GPS. Anche questi tempi di riferimento, insieme ai risultati emersi dal confronto (fra i quali verranno in particolare discussi TVE, FE e RFE), sono forniti sia graficamente che numericamente. Nel seguito sarà descritto il VI principale utilizzato per l’elaborazione, chiamato “Lettore Dati”, spiegando i motivi alla base della scelta di alcuni parametri. Questi sono perlopiù legati al reporting rate della PMU sotto esame, ma anche al fatto che, per non rischiare di perdere dati, l’acquisizione da parte dello strumento di misura deve cominciare prima dell’avvio della serie di prove, e non si deve fermare fino a 30 secondi dopo la fine di quest’ultima. Quando si comanda al calibratore di dare inizio alla generazione dei segnali di test, questa generazione avviene, per convenienza di elaborazione dei test, alla prima occorrenza del minuto se la sincronizzazione col ricevitore GPS ha avuto successo. Altrimenti, se il calibratore non ha il tempo di agganciare la temporizzazione, in quanto il comando di avvio è arrivato troppo vicino all’occorrenza del minuto corrente, la generazione viene agganciata al minuto successivo. Questo vuol dire che la serie di test ha inizio entro i primi due minuti dall’inizio dell’acquisizione. Da quel momento il calibratore alterna 30 secondi di prova e 30 secondi di preparazione alla prova successiva, fino alla fine dei test in programma. Durante ogni primo mezzo minuto viene generato il segnale modulato, mentre durante ogni secondo mezzo minuto viene generato il segnale stazionario, con lo scopo di far cessare gli effetti della modulazione precedente. La serie di prove previste ne comprende 37 con modulazione sinusoidale e 41 con modulazione rettangolare, per un totale di 78 minuti fra prove e intervalli. 16
Tutte le misure effettuate da una singola PMU sono quindi state memorizzate in un file CSV; e, per fare in modo che il Lettore Dati vi possa accedere, è stata scelta una locazione fissa tramite il “file path” nella finestra “Elaborazione dati CSV” del pannello frontale. Figura 2.2 – Esempio di path che richiama le misure effettuate da una delle PMU in esame configurata come una classe P con Fs = 100Hz Alcuni dei dati acquisiti risultano da eliminare, per evitare che vengano elaborati, così che non risulti compromessa la valutazione della PMU. Queste misure, che non si vuole siano confrontate col riferimento, sono quelle eseguite: 1) nei potenziali due minuti antecedenti all'inizio delle prove, quando l'uscita del GS è ancora nulla; 2) nei 30 secondi che intercorrono fra una prova e l’altra, quando l’uscita del GS è il segnale stazionario; 3) nei primi e negli ultimi istanti di ogni prova, quando il segnale generato potrebbe presentare delle differenze rispetto alla sua controparte a regime. Per escludere le prime è necessario individuare l'indice della prima misura di interesse dall'inizio dei test, inserendolo in un controllo specifico: "index_prove_con_timestamp_0_= start per la verifica". Figura 2.3 – Esempio di controllo che permette di escludere i primi 4680 campioni acquisiti Così facendo vengono esonerati dalla computazione tutti i campioni con indice più basso e vengono attribuiti nuovi indici a quelli rimanenti. Per verificare la correttezza dell’individuazione di questo indice si procede anche per via grafica. Il grafico che si può osservare è chiamato “magnitude”, e si trova nella sezione “Visualizzatori”. Nelle ordinate ci sono i moduli dei fasori misurati, mentre nelle ascisse gli indici delle misure corrispondenti. Visto che la serie di test può avere inizio entro due minuti dall’accensione del GS, è necessario visualizzare in questo grafico tutte le misure svolte in quell’intervallo di tempo, che sono 2∙60∙Fs. 17
Lanciando il programma, dopo aver impostato opportunamente alcuni controlli, si presenta un grafico di magnitude come quello in figura 2.4. Figura 2.4 – Verifica dell’indice di misura effettivo di inizio test L’indice che rappresenterà la misura di inizio ai test sarà uno dei primi corrispondenti ad un modulo diverso da 0 e, fra questi, in particolare, sarà quello con un timestamp ottenuto in corrispondenza dell’occorrenza del minuto. Figura 2.5 – Verifica del timestamp di una misura Sebbene una prova vera e propria duri 30 secondi, dal punto di vista del programma ne dura 60, perché considera come test anche i 30 secondi successivi. Questo vuol dire che, come impostazione predefinita, per ogni prova, le misure che vengono confrontate col riferimento sono quelle effettuate in una finestra temporale di 60 secondi che si apre all’inizio della prova. Escludendo dalla computazione le misure svolte all’inizio e alla fine di ogni prova, insieme a quelle svolte nei trenta secondi successivi, si va a ritagliare la finestra temporale che sarà chiamata “di confronto”, e quantificata non in funzione della durata ma del numero di misure che contiene. Figura 2.6 – Finestra di confronto selezionata (verde) e finestra preimpostata (rossa), per la prima prova 18
Per scegliere quante misure eliminare dall’inizio di ogni prova, si è deciso di usare un controllo apposito “#elementi da eliminare dalla computazione”. Per scegliere quanti elementi saranno contenuti in ogni finestra si è deciso invece di usare il controllo “lunghezza”. Per questi due parametri non esiste un unico valore corretto e possono essere scelti ricercando un andamento a regime basato anche sul controllo a posteriori del grafico di magnitude relativo alla prima prova. L’unico vincolo da rispettare è sulla dimensione minima della finestra: deve contenere almeno due cicli di modulazione. Poiché la finestra sarà uguale su tutte le prove bisogna considerare il caso col ciclo di modulazione più lungo, cioè la prima prova: fm=0.5Hz → Tm=2s → finestra>4s. Una volta scelte le misure da esonerare dalla computazione, bisogna scegliere anche i campioni del riferimento con i quali fare altrettanto. Dato che i fasori di riferimento vengono generati con una frequenza Frif, impostabile tramite l’apposto controllo “f-sample” (sezione “Valori di Confronto” in Figura 2.10) come multipla e molto maggiore di qualsiasi possibile reporting rate Fs, ci sono molti più fasori di riferimento rispetto a quelli misurati dalla PMU. Ogni volta che il programma elabora una misura deve quindi scegliere con quale campione di riferimento confrontarla, e sceglierà quello rappresentato da un indice uguale a quello della misura stessa moltiplicato per un numero intero che gli deve essere indicato tramite l’apposito controllo “numero” (anch’esso nella sezione “Valori di Confronto”). Perché il confronto avvenga fra fasori con lo stesso timestamp, questo numero deve essere uguale al rapporto fra Frif e Fs. Se, ad esempio, si stesse testando una PMU con reporting rate uguale a 10Hz, e se la frequenza di generazione del riferimento fosse 50Hz; le misure effettuate dovrebbero essere confrontate solo con un campione ogni cinque del riferimento, come mostrato nelle figure 2.7 e 2.8. 19
Figura 2.7 – Moduli dei fasori di riferimento, generati con Frif=50Hz Figura 2.8 – Moduli dei fasori stimati da una PMU con Fs = 10Hz Il programma di elaborazione, per funzionare correttamente, deve necessariamente sapere quante misure sono state effettuate nel corso dei secondi dedicati a ogni prova (30s) e alla fase preparatoria che la segue (30s), e questo input viene impostato tramite il controllo “numero valutazioni per test=RR*s prova”, e deve essere uguale a Fsx60. Dopo aver impostato tutti questi parametri preliminari rimane solo da selezionare quali prove prendere in esame e quale riferimento adottare. I due controlli ideati per scegliere le prove sono “numero di test” e “separatore prove”. Le prove con modulazione sinusoidale sono le prime 37, quindi per studiare solo quelle basta porre “numero di test” uguale a 37 e “separatore prove” uguale a 0. Per studiare solo le prove effettuate con modulazione rettangolare bisogna porre numero di test = 41 e separatore prove uguale a Fsx60x37. Infatti separatore prove ha una funzione identica a quella di “index_prove_con_timestamp_0_= start_per_verifica”, ma viene usato per saltare tutte le misure effettuate nel corso dei test con modulazione sinusoidale, che durano un totale di 37 minuti. Gli offeset introdotti dai due controlli si sommano. 20
Il segnale di riferimento si sceglie tramite il controllo “steady state 3” nel pannello frontale. Si è scelto di poter selezionare, da un menu a tendina, “nuovo” se si vuole un riferimento stazionario, “flicker” se si vuole un riferimento dinamico con modulazione sinusoidale, e “flicker rettangolare” se si vuole un riferimento dinamico con modulazione rettangolare. Nel caso in cui si desideri il riferimento dinamico è necessario selezionare la serie corretta di frequenze di modulazione, attraverso un opportuno pulsante “rect”. Se il controllo booleano è off, le frequenze utilizzate sono quelle in tabella 1.3 (per la modulazione sinusoidale); altrimenti sono quelle in tabella 1.4 (per la modulazione rettangolare). I controlli di cui si è parlato fino ad ora, dovrebbero essere impostati come nelle figure 2.9 e 2.10. Si ricorda che i controlli "index_prove_con_timestamp_0_= start_per_la_verifica", “#elementi da eliminare dalla computazione” e “lunghezza” sono controlli la cui impostazione è basata anche su un controllo a posteriori del grafico di magnitude. Questo grafico può essere ottenuto lanciando una prima volta il programma, avendo impostato “numero di test”=1, "index_prove_con_timestamp_0_= start_per_la_verifica"=0, “separatore prove”=0, e “numero valutazioni per test=RR*s prova”=120xFs. Lanciato il programma, dopo aver impostato correttamente tutti i controlli nel pannello frontale, si avranno a disposizione sia in forma grafica che numerica: 1) le misure svolte dalla PMU nell’ultima prova chiamata; 2) tutti i fasori di riferimento considerati; 3) le differenze di modulo e di fase, fra le misure elaborate dell’ultima prova e i corrispondenti fasori di riferimento; 4) gli indici di errore (TVE, FE, RFE) relativi alle misure elaborate nell’ultima prova; 5) per ogni prova, Il massimo TVE, FE, e RFE; 6) il massimo TVE, FE e RFE fra tutti quelli calcolati. Alcuni di questi risultati possono essere usati per valutare le PMU. Si consideri ad esempio di voler analizzare i risultati delle prove con modulazione sinusoidale effettuate su una PMU con reporting rate uguale a 50Hz, rispetto al riferimento dinamico. I risultati di queste prove verranno discussi nel capitolo successivo. 21
Figura 2.9 – Pannello frontale – Elaborazione dati CSV Figura 2.10 – Pannello frontale – Valori di confronto 22
CAPITOLO 3 – PROVE E RISULTATI In questo capitolo sono riportati i risultati delle prove effettuate su tre PMU commerciali nella disponibilità del laboratorio di misure elettriche ed elettroniche del Dipartimento di Ingegneria Elettrica ed Elettronica dell’Università degli Studi di Cagliari, configurate come indicato in tabella 3.1. Queste PMU per motivi di riservatezza verranno indicate solamente con un numero, da 1 a 3. La PMU-2 e la PMU-3 si dichiarano conformi allo standard [2] col quale sono state aggiornate le specifiche per le PMU di tipo P e di tipo M definite nello standard [1]. Queste usano, presumibilmente, un solo algoritmo per tutti i reporting rate se configurate come P (banda passante indipendente dal reporting rate), e un algoritmo diverso per ogni reporting rate se configurate come M (banda passante dipendente dal reporting rate). Gli algoritmi effettivamente utilizzati da queste PMU non sono divulgati. La PMU-1 invece è stata sviluppata quando era ancora in vigore lo standard del 2005 [6], quindi quando non esisteva la differenziazione fra PMU di tipo P e di tipo M. L’algoritmo utilizzato da questo strumento è impostabile, e per i test da compiere ne sono stati scelti due; il primo, finestra di Hann su 7 cicli, è stato selezionato per simulare il comportamento di una classe M e un secondo, finestra triangolare su 2 cicli, che è stato scelto per simulare il comportamento di una classe P. Questo comporta che la banda passante della PMU-1 dipenderà solo dalla classe di prestazione che sta emulando e mai dal reporting rate. 23
Configurazione PMU Classe di Reporting prestazione rate (Hz) M 10 M 25 M 50 PMU-1 P 10 P 25 P 50 M 10 M 25 M 50 PMU-2 P 10 P 25 P 50 M 10 M 25 M 50 PMU-3 P 10 P 25 P 50 P 100 Tabella 3.1 – configurazioni delle PMU usate per i test 24
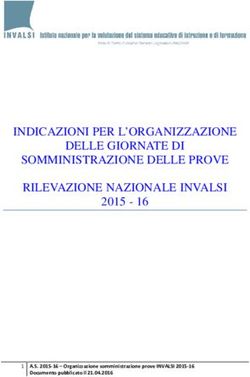
3.1 Prove con modulazione sinusoidale di ampiezza Per ogni configurazione (classe di prestazione - reporting rate) verrà riportata prima di tutto una tabella utile per ricordare i relativi limiti imposti dallo standard e la frequenza di modulazione Fr entro la quale devo essere rispettati. Dopodiché saranno riportati: 1) Un grafico di TVE per ogni PMU, in cui è presente sia il TVE s.s. che il TVEdynamic; 2) Un grafico con il FEmax di ogni PMU; 3) Un grafico con il RFEmax di ogni PMU. CONFIGURAZIONE 1: Classe M con Fs = 10Hz Limite sul TVE% 3 Limite sul FE [Hz] 0.12 Limite sul RFE [Hz/s] 2.3 Massima fm richiesta (Fr) [Hz] 2 Tabella 3.2 – limiti per la configurazione 1 Figura 3.1 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-1 configurata come classe M con Fs = 10Hz fmax(TVE 3%) = 5.5Hz fmin(TVE 3%) = 11Hz 25
Da questo primo grafico si può notare un fenomeno che si presenterà anche su tutti gli altri risultati dello stesso tipo: sia il TVEdynamic che il TVEs.s. scendono a valori prossimi allo zero per frequenze modulanti multiple della metà del reporting rate. Si consideri come esempio il caso, riportato in figura 3.2, in cui il reporting rate di una PMU è 10Hz e la frequenza di modulazione è 5Hz. Dato che il segnale modulante è un seno non sfasato, la PMU calcola il sincrofasore sempre e solo quando il modulo dell’ingresso è uguale a 50. Quindi la PMU sta percependo un segnale stazionario, ed è il motivo per cui il TVEs.s. corrispondente è molto basso. Per quanto riguarda il TVEdynamic, si ricorda che il riferimento dinamico è costituito dalla serie di fasori reali con lo stesso timestamp delle misure fatte dalla PMU; quindi anche in questo caso il riferimento risulta essere effettivamente stazionario. Figura 3.2 – Modulo dell’ingresso in un secondo (fm=10Hz) L’errore in queste prove è simile a quello che la PMU commetterebbe nel caso stesse acquisendo un segnale stazionario a frequenza nominale, quindi è piccolo. Le prove con frequenze modulanti multiple della metà del reporting rate non dovrebbero quindi essere tenute in considerazione in quanto, secondo il TVE dynamic ottenuto, sembrerebbe che la PMU non stia commettendo un errore nel considerare stazionario un segnale che in realtà è dinamico. Tale problema sarebbe aggirabile effettuando test anche con diverse fasi iniziali. 26
Figura 3.3 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-2 configurata come classe M con Fs = 10Hz fmax(TVE 3%) = 2.5Hz fmin(TVE 3%) = 4Hz Figura 3.4 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-3 configurata come classe M con Fs = 10Hz fmax(TVE 3%) = 3Hz fmin(TVE 3%) = 4Hz 27
Guardando i TVEs.s. nelle figure 3.2, 3.3 e 3.4 si può constatare che la banda passante della PMU-1 è molto più larga rispetto a quella delle altre due, ma anche molto più lontana dall’essere ideale. Una banda passante ideale ha una forma rettangolare: le componenti in frequenza che cadono al suo interno sono percepite appieno, mentre quelle al suo esterno sono ignorate del tutto. A questo proposito è notevole la banda della PMU-3, che si caratterizza per frequenze che vanno da f0-2.5Hz a f0+2.5Hz, avendo un’area di transizione molto ristretta. Sia la PMU-2 che la PMU-3 sembrano essere fatte per considerare come disturbi tutte le frequenze più alte della massima prevista nei test di conformità. La PMU-1 invece ha una larghezza di banda circa di 28Hz ma decresce piuttosto linearmente dal centro fino agli estremi. Come vantaggio, si ha che il limite sul TVEdynamic è rispettato per frequenze modulanti più alte; come svantaggio, che ci sono molte frequenze fra fmax(TVE 3%) e fmin(TVE 3%), le quali non sono smorzate abbastanza in quanto disturbi ma neanche sufficientemente mantenute come effettive componenti del segnale. Tutto ciò vuol dire che, con questa configurazione, la PMU-2 e la PMU-3 risultano più performanti quando si tratta di monitorare i segnali che ci si aspetta nelle reti di alta tensione, mentre la PMU-1 potrebbe essere considerata una migliore alternativa nei sistemi in cui si può manifestare il flicker. Figura 3.5 – FEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 10Hz 28
Figura 3.6 – RFEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 10Hz Sia i tre FEmax che i tre RFEmax nelle figure 3.5 e 3.6 rimangono nettamente al di sotto del limite richiamato in tabella 3.2 (che non è visibile a causa della scala) per tutte le frequenze di modulazione usate nelle 37 prove. Guardando i risultati di FE e i RFE appare che per la PMU-1 questi sono sempre nulli. Potrebbe essere dovuto al fatto che la sua risoluzione in frequenza è peggiore rispetto a quella delle alle altre due PMU, e quindi al fatto che se la frequenza misurata non è sufficientemente diversa da f0 questa viene considerata uguale alla nominale. CONFIGURAZIONE 2: Classe M con Fs = 25Hz Limite sul TVE% 3 Limite sul FE [Hz] 0.3 Limite sul RFE [Hz/s] 14 Massima fm richiesta (Fr) [Hz] 5 Tabella 3.3 – limiti per la configurazione 2 (limiti meno stringenti per reporting rate più alti) 29
Figura 3.7 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-1 configurata come classe M con Fs = 25Hz fmax(TVE 3%) = 5.5Hz fmin(TVE 3%) = 11Hz Sapendo che l’algoritmo di misura usato dalla PMU-1 non cambia insieme al reporting rate, ma solo insieme alla classe di prestazione simulata, non è una sorpresa che il grafico in figura 3.7 sia quasi identico a quello in figura 3.1. La banda passante, fmax(TVE 3%), e fmin(TVE 3%) non sono cambiate. L’unica differenza chiaramente evidente sta nella mancanza dei cali vertiginosi di TVE in corrispondenza delle frequenze modulanti 5Hz, 10Hz, e 15Hz. Se ne vede uno per fm=25Hz, e se fosse stata fatta una prova con fm=12.5Hz se ne riscontrerebbe uno anche in quel punto del grafico, essendo 12.5Hz la metà del reporting rate. Questa stessa considerazione si potrà fare anche paragonando i grafici in figura 3.8 e 3.9 con quelli in figura 3.3 e 3.4. 30
Figura 3.8 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-2 configurata come classe M con Fs = 25Hz fmax(TVE 3%) = 7.5Hz fmin(TVE 3%) = 10Hz Figura 3.9 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-3 configurata come classe M con Fs = 25Hz fmax(TVE 3%) = 7.5Hz fmin(TVE 3%) = 10Hz Dato che la PMU-2 e la PMU-3 si dichiarano conformi allo standard del 2014, il quale impone che la larghezza di banda di una PMU di classe M debba essere uguale al suo reporting rate, è normale constatare dalle figure 3.8 e 3.9 che il passaggio da un reporting rate di 10Hz ad uno di 25Hz, con il conseguente cambio di algoritmo (sconosciuto), abbia portato il TVEs.s. ad azzerarsi solo per frequenze modulanti maggiori di 12Hz, piuttosto che per quelle maggiori di 4.5Hz come si vedeva nelle figure 3.3 e 3.4. 31
L’allargamento delle bande passanti ha portato ad un incremento della fmax(TVE 3%) che va circa di pari passo a quello della fmin(TVE 3%). Figura 3.10 – FEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 25Hz Figura 3.11 – RFEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 25Hz Anche con questa configurazione il FE e il RFE rimangono sempre al di sotto del limite. Dal grafico in figura 3.10 si può vedere la risoluzione in frequenza della PMU-3: 1mHz. 32
CONFIGURAZIONE 3: Classe M con Fs = 50Hz Limite sul TVE% 3 Limite sul FE [Hz] 0.3 Limite sul RFE [Hz/s] 14 Massima fm richiesta (Fr) [Hz] 5 Tabella 3.4 – limiti per la configurazione 3 Figura 3.12 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-1 configurata come classe M con Fs = 50Hz fmax(TVE 3%) = 5.5Hz fmin(TVE 3%) = 11Hz 33
Figura 3.13 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-2 configurata come classe M con Fs = 50Hz fmax(TVE 3%) = 12Hz fmin(TVE 3%) = 18Hz Figura 3.14 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-3 configurata come classe M con Fs = 50Hz fmax(TVE 3%) = 13Hz fmin(TVE 3%) = 18Hz Le considerazioni fatte quando si sono paragonati i grafici di TVE relativi alla configurazione 2 con quelli relativi alla configurazione 1 sono valide anche quando si tratta di paragonare quelli relativi alla configurazione 3 con quelli relativi alla configurazione 2: • PMU-1 → grafici di TVE quasi identici; • PMU-2 e PMU-3 → ulteriore allargamento della banda passante con conseguente incremento di fmax(TVE 3%) e fmin(TVE 3%). 34
Se fosse stata fatta una prova con una frequenza modulante di 12.5Hz, questa volta non vi sarebbe associato alcun calo anomalo di TVE, in quanto la metà del reporting rate è uguale a 25Hz. Figura 3.15 – FEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 50Hz Figura 3.16 – RFEmax in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi M con Fs = 50Hz Ancora una volta FEmax e RFEmax restano al di sotto del limite in tutte le prove. 35
CONFIGURAZIONE 4: Classe P con Fs = 10Hz Limite sul TVE% 3 Limite sul FE [Hz] 0.03 Limite sul RFE [Hz/s] 0.6 Massima fm richiesta (Fr) [Hz] 1 Tabella 3.5 – limiti per la configurazione 4 Lo standard del 2014 non lega la banda passante di una PMU di classe P al suo reporting rate, quindi, come sintomo del presunto mantenimento di un unico algoritmo per tutte le configurazioni di classe P con diverso Fs, ci si può aspettare che sia i grafici di TVE relativi alla PMU-2 che quelli relativi alla PMU-3 non cambino significativamente in funzione del reporting rate. Questo è quello che accadrà sicuramente per la PMU-1, della quale si sa per certo che fra configurazione 4, e le prossime 5, 6 e 7 non ci sarà alcuna variazione della durata e della forma delle finestre di osservazione. Figura 3.17 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-1 configurata come classe P con Fs = 10Hz fmax(TVE 3%) = 16Hz fmin(TVE 3%) = 33.333Hz 36
Figura 3.18 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-2 configurata come classe P con Fs = 10Hz fmax(TVE 3%) = 19Hz fmin(TVE 3%) = - Figura 3.19 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-3 configurata come classe P con Fs = 10Hz fmax(TVE 3%) = 16Hz fmin(TVE 3%) = 33.333Hz 37
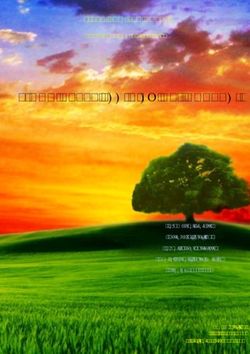
FE P 10 0.50 0.45 0.40 0.35 0.30 FE [Hz] 0.25 PMU-1 0.20 PMU-2 PMU-3 0.15 0.03 0.10 0.05 0.00 Frequenze di modulazione [Hz] Figura 3.20 – FEmax e limite di conformità sul FE (0.03Hz); in relazione ai test con modulazione sinusoidale sulle PMU- 1,2,3 configurate come classi P con Fs = 10Hz 38
RFE P 10 30 27 24 21 18 FE [Hz] 15 PMU-1 PMU-2 PMU-3 12 0.6 9 6 3 0 Frequenze di modulazione [Hz] Figura 3.21 – RFEmax e limite di conformità sul RFE (0.6Hz/s); in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi P con Fs = 10Hz Con questa configurazione solamente la PMU-1 rispetta il limite sia sul FE che sul RFE per tutte le frequenze di modulazione usate nei test. Nonostante la PMU-2 sia quella con la fmax(TVE 3%) più alta, oltrepassa i limiti di FE e RFE a partire da frequenze di modulazione molto più basse (circa 4,5Hz). 39
CONFIGURAZIONE 5: Classe P con Fs = 25Hz Limite sul TVE% 3 Limite sul FE [Hz] 0.06 Limite sul RFE [Hz/s] 2.3 Massima fm richiesta (Fr) [Hz] 2 Tabella 3.6 – limiti per la configurazione 5 Figura 3.22 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-1 configurata come classe P con Fs = 25Hz fmax(TVE 3%) = 15Hz fmin(TVE 3%) = 33.333Hz 40
Figura 3.23 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-2 configurata come classe P con Fs = 25Hz fmax(TVE 3%) = 20Hz fmin(TVE 3%) = - Figura 3.24 – TVEdynamic, TVEs.s. e limite di conformità sul TVE (3%); in relazione ai test con modulazione sinusoidale sulla PMU-3 configurata come classe P con Fs = 25Hz fmax(TVE 3%) = 15Hz fmin(TVE 3%) = 33.333Hz 41
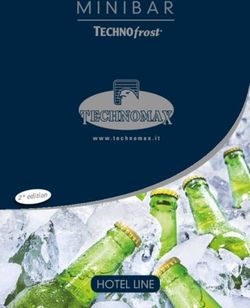
FE P 25 0.50 0.45 0.40 0.35 0.30 FE [Hz] 0.25 PMU-1 0.20 PMU-2 0.15 0.10 PMU-3 0.05 0.06 0.00 Frequenze di modulazione [Hz] Figura 3.25 – FEmax e limite di conformità sul FE (0.06Hz); in relazione ai test con modulazione sinusoidale sulle PMU- 1,2,3 configurate come classi P con Fs = 25Hz RFE P 25 30 27 24 21 18 RFE [Hz/s] 15 PMU-1 12 PMU-2 9 PMU-3 6 2.3 3 0 Frequenze di modulazione [Hz] Figura 3.26 – RFEmax e limite di conformità sul RFE (2.3Hz/s); in relazione ai test con modulazione sinusoidale sulle PMU-1,2,3 configurate come classi P con Fs = 25Hz 42
Puoi anche leggere