Under Water Anchors S.r.l - Realizzazione di Ancoraggi Subacquei Sub-Orizzontali secondo la tecnica "U.W.A."
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Cooperativa Muratori & Cementisti
SAPIR ENGINEERING S.r.l. S.OPE.MAR. S.r.l.
– C.M.C. di Ravenna
Under Water Anchors S.r.l.
Realizzazione di
Ancoraggi Subacquei Sub-Orizzontali
secondo la tecnica “U.W.A.”
Indice
I. “U.W.A.” - La Tecnologia ................................................................................................................3
Premessa.......................................................................................................................................... 3
I.1 La tecnica miniJET® ................................................................................................................ 3
I.2 Ancoraggi subacquei “U.W.A.”................................................................................................. 4
I.3 Sequenza operativa degli ancoraggi subacquei “U.W.A.”....................................................... 4
II. “U.W.A.” - Il Sistema di Perforazione ............................................................................................7
Premessa.......................................................................................................................................... 7
II.1 Il Sistema “U.W.A.”................................................................................................................... 8
1. Cingolato semovente .......................................................................................................... 8
2. Mast a tralicci telescopici .................................................................................................. 10
3. Modulo di perforazione ..................................................................................................... 10
III. CASE STORIES ..............................................................................................................................12
Premessa........................................................................................................................................ 12
III.1 Il Test ..................................................................................................................................... 12
III.2 Porto di Ravenna - Consolidamento banchine portuali mediante esecuzione di ancoraggi
subacquei con la tecnica “U.W.A.” ........................................................................................ 14
1. Descrizione fasi esecutive di un tirante ( SAPIR - banchina 8 ) ..................................... 15
Under Water Anchors
I. “U.W.A.” - La Tecnologia
Premessa
Il crescente bisogno internazionale di impiegare navi con sempre maggiori capacità di carico ha
evidenziato la necessità di approfondire i fondali portuali e conseguentemente di consolidare le
relative banchine d’attracco.
Ad oggi, comunque, le tecniche tradizionali di consolidamento, costituite prevalentemente
dall’infissione di nuovi e più profondi palancolati, sono caratterizzate da numerosi e spesso irrisolti
problemi tecnico-esecutivi. Il sistema di perforazione automatizzato subacqueo “U.W.A.” è stato
studiato e realizzato per risolvere alcuni di essi.
L’idea originale, e per certi versi la più semplice, è stata quella di installare, attraverso l’impiego
della tecnica miniJET®, ancoraggi subacquei sub-orizzontali.
Questo, sicuramente, è il modo più efficace per contrastare i carichi trasmessi alle paratie dei moli
portuali e la tecnica miniJET® è di certo il sistema più semplice e rapido per installare ancoraggi in
condizioni operative particolarmente problematiche.
I.1 La tecnica miniJET®
La tecnica miniJET® coniuga l’impiego di sistemi auto-perforanti, costituiti da barre e manicotti
di giunzione, con l’iniezione di miscele cementizie ad alta pressione tipica del Jet-Grouting.
Per l’applicazione di tale tecnica vengono quindi sostanzialmente realizzati manicotti di giunzione,
dotati di un apposito sistema di tenute e scalpelli di perforazione con ugelli (normalmente n. 2) per
l’iniezione ad alta pressione (Fig. 1).
Le “colonne miniJET®” vengono dunque realizzate seguendo la metodologia “JETTING-IN” in
base alla quale l’iniezione avviene contemporaneamente alla fase di perforazione procedendo dalla
superficie / paratia fino alla profondità di progetto, raggiunta la quale si considera terminata la
realizzazione della colonna stessa. Il sistema auto-perforante è quindi abbandonato nel terreno,
esattamente al centro della colonna miniJET®, a costituire il tirante vero e proprio, mentre la colonna
così realizzata assolve alla funzione di “bulbo di ancoraggio” del tirante stesso.
Con tale tecnica è possibile realizzare colonne di terreno con dimensioni che possono variare
dai 300 ai 900 mm di diametro in funzione delle condizioni geologico / geotecniche locali, delle
specifiche esigenze progettuali e dei parametri di iniezione adottati.
Fig. 1 – Schema composizione batteria auto-perforante miniJET®
3
Under Water Anchors
I.2 Ancoraggi subacquei “U.W.A.”
In funzione delle specifiche esigenze progettuali di approfondimento del fondale e quindi dei
carichi trasmessi alle paratie dei moli, gli ancoraggi subacquei possono essere realizzati, a diverse
profondità, secondo schemi che prevedono la loro installazione su una o più file.
Per conseguire tali risultati tecnici è stata quindi progettata e realizzata una specifica attrezzatura
di perforazione robotizzata denominata “U.W.A.” – UnderWater Anchoring Unit in grado di installare
ancoraggi subacquei a diverse profondità in modo semi-automatico.
I tiranti sono realizzati con la tecnica di perforazione a rotazione con l’impiego di barre auto-
perforanti dotate di uno scalpello su cui sono montati due ugelli disposti a 45° e a 90° rispetto all’asse
di perforazione.
Le barre lasciate in sito vanno a costituire l’armatura dei tiranti stessi.
I.3 Sequenza operativa degli ancoraggi subacquei “U.W.A.”
A. Posizionamento dell’unità di perforazione subacquea alla quota di progetto in corrispondenza del
punto di perforazione prescelto
B. Introduzione della batteria di perforazione / iniezione miniJET® all’interno del preforo
precedentemente realizzato tramite carotaggio nella paratia / palancola in calcestruzzo / acciaio
del molo esistente
4
Under Water Anchors
C. Realizzazione, a tergo della paratia / palancola, del “tratto libero” (Free Zone) del tirante mediante
semplice circolazione di acqua
D. Perforazione e contemporanea iniezione di miscela cementizia per la realizzazione del “bulbo di
ancoraggio” (Bond Zone)
E. La giunzione di ulteriori barre prelevate dal “carousel” (magazzino barre) consente il
raggiungimento della profondità di progetto
5
Under Water Anchors
F. Ultimata l’iniezione viene “sganciata” la testa di rotazione abbandonando le barre nel
preforo / bulbo e terminando così la realizzazione del tirante
Lasciando un tempo di maturazione congruente al tipo di cemento impiegato, il tirante sarà
tesato al carico di esercizio di progetto e completato con l’installazione di una piastra d’acciaio di
ripartizione.
La protezione dalla corrosione della testata del tirante sarà garantita mediante l’installazione di
una guaina troncoconica coassiale e di una “cuffia” esterna, entrambe in polietilene, al cui interno
verrà inserito uno speciale grasso di protezione ed eventualmente un anodo sacrificale di zinco per la
protezione passiva del tirante stesso.
Va sottolineato che tutti i tiranti realizzati con la tecnica “U.W.A.” e protetti come sopra
descritto, sono “ritesabili” secondo quanto previsto dalle normative tecniche vigenti in materia
(Raccomandazioni AICAP).
6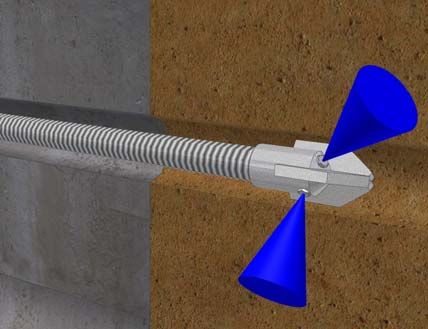
Under Water Anchors
II. “U.W.A.” - Il Sistema di Perforazione
Premessa
La tecnica “U.W.A.” prevede che gli ancoraggi subacquei vengano installati mediante l’impiego di
una speciale attrezzatura di perforazione comandata dalla superficie e posizionata sulla banchina.
Il sistema è costituito da un mezzo cingolato semovente (Fig. 2) che effettua le operazioni di
movimento dell’intera macchina che a sua volta è completata da un braccio meccanico che sostiene,
tramite un mast a tralicci telescopici, il Modulo di perforazione / iniezione robotizzato (Fig. 3) che verrà
posizionato sottacqua alla profondità di progetto.
Le diverse attività di perforazione / iniezione sono completamente gestite attraverso un sistema di
controllo remoto automatizzato.
Fig. 2 – Sistema di perforazione “U.W.A.” Fig. 3 – Modulo di perforazione subacqueo
Con questa tecnica si riesce a posizionare gli ancoraggi ad una profondità tale per cui si ottiene
la massima efficienza (esempio: Fig. 4).
Ancoraggio
miniJET®
Fig. 4 – Schema di realizzazione tiranti di rinforzo subacquei
7
Under Water Anchors
II.1 Il Sistema “U.W.A.”
Grazie all’esperienza precedentemente acquisita da Tecniwell S.r.l. nella realizzazione di sistemi
di perforazione robotizzata per microtunnelling, è stato sviluppato il Sistema “U.W.A.” costituito dai
seguenti elementi principali (Fig. 5):
1. Cingolato semovente
2. Mast a tralicci telescopici
3. Modulo di perforazione
Cingolato
semovente
Modulo di
perforazione
Mast a tralicci
telescopici
Fig. 5 – Schema di composizione Sistema “U.W.A.”
1. Cingolato semovente
Sul cingolato semovente sono posizionate n. 2 cabine di comando per la gestione dell’operatività
dell’intero Sistema di perforazione “U.W.A.”; nello specifico:
a. cabina di comando e controllo (Fig. 6) per la movimentazione ed il piazzamento del cingolato
semovente in corrispondenza del punto di perforazione, che sarà individuato sulla banchina con
un’apposita marca (attraverso i comandi della cabina, l’operatore può eseguire un primo
piazzamento “grossolano” dell’Unità di perforazione in corrispondenza del punto di perforazione
subacqueo);
b. cabina di comando e controllo del posizionamento finale della macchina e delle operazioni di
perforazione (Fig. 7).
Fig. 6 Fig. 7
8
Under Water Anchors
Nella cabina di comando e controllo dell’Unità di perforazione (Fig. 8a - 8b) sono presenti:
a. due monitor che ricevono immagini da quattro telecamere, poste in posizioni strategiche sul Modulo
di perforazione, per visualizzare le operazioni di perforazione ed il carico delle barre autoperforanti;
b. una consolle di comando ed uno schermo “touch screen” su cui, virtualmente, mediante un
software dedicato, vengono riprodotte in tempo reale tutte le operazioni che la macchina compie
durante le fasi di perforazione.
Fig. 8a Fig. 8b
L’operatività della macchina è garantita da una serie di sensori che permettono la visualizzazione
di un’immagine virtuale dell’attrezzatura e di tutti i suoi movimenti.
Le telecamere, laddove le condizioni di visibilità lo consentono, danno un ausilio alle manovre
senza però condizionarle, potendo così operare anche in caso di forte torbidità.
Il Sistema di Perforazione Automatizzato Subacqueo “U.W.A.” è predisposto per la registrazione
di tutti i principali parametri relativi alla realizzazione degli ancoraggi subacquei ed è quindi in grado di
emettere uno specifico report (Fig. 9) per ogni ancoraggio eseguito e sul quale vengono specificati:
- la velocità di avanzamento (m/min)
- la forza di spinta (Kg)
- la coppia applicata (Kgm)
- la velocità di rotazione (rpm)
- la pressione di iniezione (Bar)
Sono inoltre evidenziati tutti i dati caratteristici del tirante stesso quali, ad esempio: numerazione
identificativa, data di esecuzione, tempo di esecuzione totale, tempo di carotaggio, tempo di
perforazione.
Fig. 9 – Report ancoraggio miniJET® subacqueo
9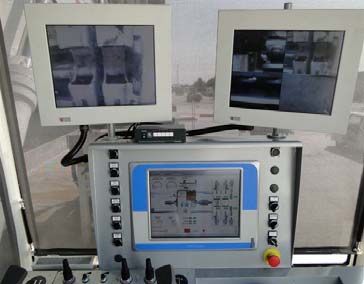
Under Water Anchors
2. Mast a tralicci telescopici
I movimenti verticali del mast, trasmessi da un sistema di verricelli, permettono di posizionare il
Modulo di perforazione alla profondità richiesta fino ad un massimo di -13,10 metri rispetto al piano
di lavoro della banchina (Fig. 10).
Fig. 10 – Profondità massima di perforazione
3. Modulo di perforazione
Il corretto posizionamento del Modulo di perforazione è garantito da un sistema a più gradi di
libertà, che consente i seguenti movimenti principali:
rotazione dell’Unità di perforazione su un piano orizzontale (perpendicolare al “mast” principale):
95° + 10°;
traslazione dell’Unità di perforazione lungo l’asse “X” (perpendicolare all’asse di perforazione):
500 mm;
traslazione dell’Unità di perforazione lungo l’asse “Y” (perpendicolare all’asse di perforazione):
500 mm;
movimento di “beccheggio” dell’Unità di perforazione rispetto all’asse “X”: + 5° / - 5°.
10Under Water Anchors
Nello specifico il Modulo di perforazione è costituito da (Fig. 11):
1. Mast di perforazione
2. Testa di rotazione
3. Caricatore a tamburo barre miniJET® L = 3.000 mm (n. 10 pz.)
4. Gruppo centratore-morse-svitatore
5. Manipolatore meccanico carotiere
6. Manipolatore meccanico barre miniJET®
7. Videocamere e sistema di illuminazione
8. Scatola alloggiamento valvole idrauliche e logica
9. Catena porta-tubi
8 7 9 3
Fig. 11 – Modulo di perforazione
1
4 5 2 6
L’approccio finale del Modulo di perforazione alla banchina portuale è assistito mediante
l’impiego di quattro sensori d’approccio (Fig. 12).
Sensori di
approccio
Fig. 12 – Sensori di approccio
11Under Water Anchors
III. CASE STORIES
Premessa
La tecnologia “U.W.A.” ad oggi è già stata applicata con successo nell’area portuale di
Ravenna per il consolidamento di una parte delle banchine costituenti il porto stesso, in previsione
dell’approfondimento dei fondali ad una quota di circa -12,00 metri rispetto al livello medio mare.
Nello specifico va evidenziato il fatto che precedentemente è stato eseguito un test in scala
reale, finalizzato alla validazione della tecnica per la sua applicazione nell’esecuzione dei lavori di cui
sopra.
In seguito verranno descritte le attività svolte nel Porto di Ravenna sia per la realizzazione del
test, sia per l’esecuzione del lavoro di consolidamento vero e proprio.
III.1 Il Test
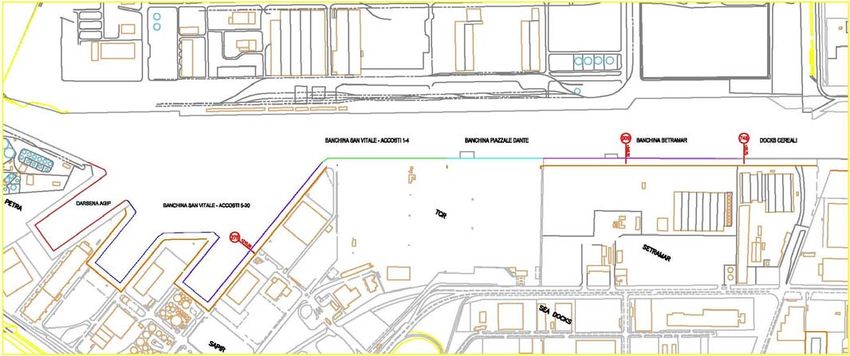
Nel periodo giugno - luglio 2010, in fregio all’accosto n. 18 della Darsena San Vitale (Fig. 13
e 14), è stato eseguito un test in scala reale caratterizzato dalla realizzazione di n. 7 tiranti
subacquei miniJET®.
Fig. 13 – Localizzazione campo prove
Fig. 14 – Allestimento del campo prove
12Under Water Anchors
Il test è stato predisposto dalla SAPIR Engineering S.r.l., incaricata dall’Autorità Portuale di
Ravenna di redigere il progetto di approfondimento dei fondali ad una quota di -12,00 m rispetto al
livello medio mare.
L’esecuzione del test è stata possibile grazie all’impiego della tecnologia “U.W.A.” – Under Water
Anchoring System, messa a disposizione dalla Tecniwell S.r.l. di Piacenza, società che ha realizzato
il Sistema di perforazione robotizzato denominato appunto “U.W.A.”.
Nello specifico sono stati realizzati tiranti di 18,00 m di lunghezza, di cui n. 3 alla quota di -5,00 m
e n. 4 alla quota di -8,00 m dal livello medio mare.
I tiranti di prova sono stati eseguiti secondo la tecnica miniJET®, con pressioni d’iniezione di
circa 400 Bar per la realizzazione di un bulbo d’ammarro di circa 400 mm di diametro.
Il completamento delle testate dei tiranti (Fig. 15) è avvenuto dopo l’installazione di una piastra di
distribuzione dei carichi zincata, di una protezione in polietilene con grasso di tipo marino ed un
elemento sacrificale in zinco per la protezione passiva del tirante contro le correnti vaganti;
in precedenza, tutti i tiranti miniJET® erano stati pretensionati ad un carico di 100 KN mediante un
martinetto idraulico.
Diaframma
Martinetto
Dado
Barra
miniJET
Manicotto Dado
Piastra Piastra
Fig. 15 – Rappresentazione metodologica pre-tensionamento tiranti
Successivamente alla loro realizzazione, i tiranti di prova sono stati sottoposti a diversi cicli di
tesatura al fine di verificare la compatibilità dei tiranti stessi con le specifiche esigenze progettuali e
con le condizioni litologiche locali.
Le prove eseguite hanno dato esiti estremamente positivi in funzione dei carichi di esercizio applicati
(300 KN) e di quelli di rottura delle barre impiegate (Tipo R51: 630 KN).
Di seguito (Fig. 16 e 17) si riportano due esempi di prove di carico eseguite nel sopracitato test.
Fig. 16 – Tirante di prova: profondità -5,00 m l.m.m. Fig. 17 – Tirante di prova: profondità -8,00 m l.m.m.
13Under Water Anchors
III.2 Porto di Ravenna - Consolidamento banchine portuali mediante
esecuzione di ancoraggi subacquei con la tecnica “U.W.A.”
La validazione della tecnica “U.W.A.” ha dato il via al primo lotto dei lavori di consolidamento
delle banchine del porto di Ravenna, necessari per il successivo approfondimento dei fondali alla
quota di progetto di -12,00 m dal livello medio mare (Fig. 18).
I terreni interessati dall’intervento in oggetto sono caratterizzati, prevalentemente, da livelli di
sabbie, limi ed argille: litologie tipiche di condizioni deposizionali marine e di laguna di bassa energia.
I tiranti del primo lotto, circa 890, sono stati tutti realizzati con la tecnica “U.W.A.” secondo la
metodologia miniJET®, che consente l’impiego contemporaneo dei sistemi auto-perforanti e della
tecnica di iniezione jet-grouting.
Nello specifico, sono stati eseguiti ancoraggi sub-orizzontali alla quota di -8,00 m dal livello
medio mare di 18,00 m di lunghezza e con un bulbo d’ammarro di circa 400 mm di diametro; le barre
ed i relativi manicotti di giunzione sono stati sottoposti a trattamento di zincatura galvanica.
Il primo lotto, dei due preventivati, consta nella realizzazione di circa 16.000 metri di ancoraggi.
Fig. 18 – Planimetria d’insieme delle banchine oggetto del consolidamento
Tirante 276
14Under Water Anchors
1. Descrizione fasi esecutive di un tirante ( SAPIR - banchina 8 )
CARICO PRESSIONE ALLUNGAMENTO (mm) TIRANTE numero 276
(kN) (bar)
t = 0' t = 1' t = 2' t = 3' t = 4' t = 5' Delta Progressiva 210,50
Quota di esecuzione -8,50
100 81 5,90 5,93 5,96 5,98 6,00 6,01 0,11
Data di Esecuzione 28/06/2011
Pressione Malta Cementizia 340 bar
200 161 7,42 7,45 7,48 7,51 7,53 7,54 0,12
Velocità di Avanzamento 100 cm/min
Velocità Rotazione Carotiere 600 giri/min
300 242 8,83 8,87 8,91 8,94 8,96 8,97 0,14
Velocità Rotazione Asta 12 giri/min
Ora Inizio Carotaggio 11,05
393,6 317 10,42 10,58 10,75 10,78 10,80 10,82 0,40
Ora Fine Carotaggio 11,10
Ora Inizio Tirante 11,14
200 161 9,82 9,81 9,81 9,81 9,81 9,80 -0,02
Ora Fine Tirante 11,50
Data di Posa Piastra 13/10/2011
100 81 8,55 8,54 8,54 8,53 8,53 8,53 -0,02
Data di Tesatura 11/01/2012
Note Tirante Esecuzione Regolare
0 0 4,01 3,96 3,95 3,95 3,95 3,95 -0,06
Note Tesatura Assestamento del dado al martinetto
di tesatura durante il primo step
Fotografie
Grafico Carico – Allungamento
15Puoi anche leggere

















































