SIMATIC S7-1200 Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
SIMATIC S7-1200 Aggiornamento del manuale di sistema S7-1200, edizione 06/2015 Informazioni sul prodotto Informazioni generali sull'aggiornamento della documentazione dell'S7-1200 Nonostante il nostro impegno per garantire la precisione e la chiarezza della documentazione che accompagna i prodotti alcune pagine del manuale del sistema di automazione S7-1200 contengono informazioni incomplete, errate o fuorvianti. Questo documento contiene i seguenti aggiornamenti ● Controllo del movimento (Pagina 1) ● Aggiornamento delle variabili dei blocchi dati (DB) per le istruzioni Modbus RTU (Pagina 5) ● Numero massimo di slave Modbus supportati (Pagina 8) ● Nota sul cablaggio per gli SB digitali (Pagina 8) ● Modulo PtP con master PROFIBUS CM 1243-5 (Pagina 8) ● Proprietà di avviamento della CPU (Pagina 8) ● Eliminazione e rinomina dei log di dati (Pagina 9) ● Disattivazione del protocollo SNMP (Pagina 10) ● Parametro NEW_PERIOD dell’istruzione CTRL_HSC (Pagina 11) ● Campo di corrente analogica dell’SM 1231 (Pagina 12) ● Istruzioni DPRD_DAT e DPWR_DAT (lettura/scrittura coerente dei dati per gli slave DP) (Pagina 12) ● Importazione del certificato di sicurezza Siemens per il Web server (Pagina 12) ● Utilizzo del protocollo USS con il CB 1241 (Pagina 12) Controllo del movimento Il presente aggiornamento del manuale di sistema descrive i seguenti aspetti del controllo del movimento: ● Esecuzione dei blocchi funzionali (FB) di movimento nella versione FW V4.1.2 (Pagina 2) ● Versioni delle istruzioni di controllo del movimento (Pagina 2) ● Istruzione MC_Home (Indirizza e posiziona asse) (Pagina 2) ● Istruzione MC_WriteParam (Pagina 4) ● Istruzione MC_ChangeDynamic (Pagina 4) ● Configurazione dell’asse - Ciclo dell'applicazione del servoazionamento MC (OB91) (Pagina 4) ● Modifica del nome degli oggetti tecnologici (Pagina 4) ● ErrorID e ErrorInfo (Pagina 5) © Siemens AG 2015. Tutti i diritti riservati A5E03929128-AH, 08/2015 1
Esecuzione dei blocchi funzionali (FB) di movimento nella versione FW V4.1.2
Per garantire il funzionamento corretto dei programmi di controllo del movimento con l’S7-1200 FW V4.1.2 si devono
eseguire tutti i blocchi funzionali di movimento dall’OB 1 o dai blocchi richiamati dall’OB 1. Per poter utilizzare integralmente
tutte le funzioni di controllo del movimento si deve usare la versione FW V4.1.1.
Se nel progetto non si utilizza il controllo del movimento si può usare la versione FW V4.1.2.
Versioni delle istruzioni di controllo del movimento
Nota
Le istruzioni di controllo del movimento con versione da V1.0 a V3.0 controllano attivamente l’uscita ENO. Quando si verifica
un errore nel blocco l’uscita ENO viene impostata su OFF. L’errore viene segnalato dalle uscite ERROR, ErrorID e ErrorInfo
del blocco. L’uscita ENO consente di valutare lo stato dell’istruzione e di eseguire in serie le istruzioni successive.
Nelle istruzioni di controllo del movimento con versione V4.0 e V5.0 l’uscita ENO resta vera finché l’istruzione viene eseguita
indipendentemente dal suo stato di errore. Di conseguenza i programmi che utilizzavano istruzioni di controllo del
movimento con versione V3.0 o precedente che dipendono dallo stato di ENO potrebbero funzionare in modo errato. Se si
utilizzano funzioni di controllo del movimento con versione V4.0 o successiva questo problema può essere evitato valutando
lo stato delle istruzioni con le uscite DONE e ERROR invece che con l’uscita ENO.
Istruzione MC_Home (Indirizza e posiziona asse)
L’istruzione MC_Home è stata ampliata con la regolazione dell’encoder assoluto:
● Regolazione dell'encoder assoluto (relativa)
MC_Home.Mode = 6
La posizione attuale viene spostata del valore del parametro "MC_Home.Position". L’offset del valore assoluto calcolato
viene memorizzato a ritenzione nella CPU (.StatusSensor.AbsEncoderOffset).
● Regolazione dell'encoder assoluto (assoluta)
MC_Home.Mode = 7
La posizione attuale viene impostata sul valore del parametro "MC_Home.Position". L’offset del valore assoluto calcolato
viene memorizzato a ritenzione nella CPU (.StatusSensor.AbsEncoderOffset).
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
2 A5E03929128-AH, 08/2015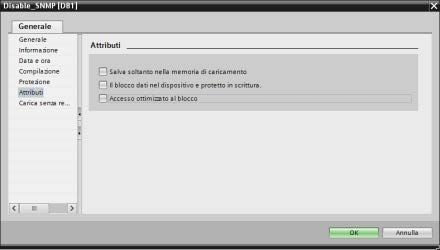
Tabella 1 Parametri dell'istruzione MC_Home
Parametro e tipo Tipo di dati Descrizione
Axis IN TO_Axis_PTO Oggetto tecnologico Asse
Execute IN Bool Avvio del task con un fronte positivo
Position IN Real • Mode = 0, 2, e 3 (posizione assoluta dell’asse al termine
dell’operazione di spostamento nel punto di riferimento)
• Mode = 1 (valore di correzione per la posizione attuale
dell’asse)
• Mode = 6 (la posizione attuale viene spostata del valore
del parametro "MC_Home.Position“).
• Mode = 7 (la posizione attuale viene impostata sul valore
del parametro "MC_Home.Position“).
Valori limite: -1,0e12 ≤ Position ≤ 1,0e12
Mode IN Int Modo di ricerca del punto di riferimento:
• 0: ricerca diretta del punto di riferimento, assoluta
La nuova posizione dell’asse è determinata dal valore di
posizione del parametro "Position".
• 1: ricerca diretta del punto di riferimento, relativa
La nuova posizione dell’asse è determinata dalla posizio-
ne attuale dell’asse + il valore di posizione del parametro
"Position".
• 2: ricerca passiva del punto di riferimento
Ricerca del punto di riferimento in base alla configurazione
dell’asse. Dopo lo spostamento nel punto di riferimento il
valore del parametro "Position" viene impostato come
nuova posizione dell’asse.
• 3: ricerca attiva del punto di riferimento
Approssimazione al punto di zero in base alla configura-
zione dell’asse. Dopo lo spostamento nel punto di riferi-
mento il valore del parametro "Position" viene impostato
come nuova posizione dell’asse.
• 6: la posizione attuale viene spostata del valore del para-
metro "MC_Home.Position“. L’offset del valore assoluto
calcolato viene memorizzato a ritenzione nella CPU
(.StatusSensor.AbsEncoderOffset).
• 7: la posizione attuale viene impostata sul valore del pa-
rametro "MC_Home.Position“. L’offset del valore assoluto
calcolato viene memorizzato a ritenzione nella CPU
(.StatusSensor.AbsEncoderOffset).
Done OUT Bool TRUE = task concluso.
Busy OUT Bool TRUE = task in esecuzione.
CommandAborted OUT Bool TRUE = durante l’esecuzione il task è stato interrotto da un
altro task.
Error OUT Bool TRUE = si è verificato un errore durante l’esecuzione il task.
La causa dell’errore è indicata nei parametri "ErrorID" e "Erro-
rInfo".
ErrorID OUT Word ID di errore per il parametro "Error"
ErrorInfo OUT Word ID dell’informazione di errore per il parametro "ErrorID"
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
A5E03929128-AH, 08/2015 3Istruzione MC_WriteParam
Per il collegamento degli azionamenti tramite PROFIdrive/uscita analogica non si possono scrivere i parametri con
MC_WriteParam perché questa istruzione richiede di riavviare l’oggetto tecnologico. Le informazioni fornite dalla Guida in
linea di TIA Portal su questa istruzione sono errate.
Istruzione MC_ChangeDynamic
L’istruzione MC_ChangeDynamic può essere utilizzata solo per collegare gli azionamenti tramite PTO (Pulse Train Output).
Configurazione dell’asse - Ciclo dell'applicazione del servoazionamento MC
(OB91)
Ciclo dell’applicazione del servoazionamento MC (OB91)
Per evitare interruzioni durante l’esecuzione del programma nella CPU, impostare il ciclo dell’applicazione in funzione del
numero di assi utilizzati come indicato di seguito:
Ciclo dell’applicazione = numero di assi x 2 ms
Numero di assi Ciclo dell’applicazione
1 2 ms
2 4 ms
4 8 ms
8 16 ms
L’azionamento SINAMICS G120 aggiorna l’immagine di processo ogni 4 ms. Per migliorare il controllo impostare il ciclo
dell’applicazione del servoazionamento MC (OB 91) a 4 ms o a un multiplo di 4 ms.
Overflow del servoazionamento MC (OB91)
La CPU non passa a STOP in caso di overflow del servoazionamento MC (OB 91). Le informazioni fornite dalla Guida in
linea di TIA Portal sull’arresto in caso di overflow del servoazionamento MC (OB91) sono errate.
Se necessario si può fare in modo che la CPU venga impostata su STOP in caso di overflow del servoazionamento MC (OB
91) utilizzando un OB di errore temporale (OB 80).
Immagine di processo parziale OB Servo PIP
Per controllare in modo ottimale i moduli di I/O (ad es. dei finecorsa hardware) utilizzati dal controllo del movimento li si deve
assegnare all’immagine di processo parziale "OB Servo PIP". In questo modo i moduli di I/O vengono elaborati
contemporaneamente all’oggetto tecnologico.
I contatori veloci (HSC) utilizzati dal controllo del movimento vengono assegnati automaticamente all’immagine di processo
parziale "OB Servo PIP".
Modifica del nome degli oggetti tecnologici
Se il nome degli oggetti tecnologici cambia, per garantire la coerenza del progetto lo si deve caricare nella CPU in STOP. Il
nome di un oggetto tecnologico cambia ad esempio quando si cancella l’oggetto e se ne crea uno nuovo con un nuovo
nome e numero di blocco dati.
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
4 A5E03929128-AH, 08/2015ErrorID e ErrorInfo
Sono state aggiunte le seguenti informazioni ErrorID e ErrorInfo:
● l’ErrorInfo 16#003D viene visualizzata anche in caso di disattivazione di un azionamento con collegamento analogico.
● è stata integrata l’ErrorInfo 16#002C per l’ErrorID 16#820A come indicato nella seguente tabella:
Tabella 2 ErrorID 16#820A
ErrorID ErrorInfo Descrizione Soluzione
16#820A Non è possibile ritardare l’asse -
16#0013 L’asse è attivato nel programma utente. Disattivare l’asse con l’istruzione MC_Power; riav-
viare.
16#0027 L’asse viene controllato in modalità manuale Uscire dalla modalità manuale; riavviare.
(pannello di controllo assi).
16#002C L’asse non è disattivato. Disattivare l’asse; riavviare il comando.
16#0047 L’oggetto tecnologico non è pronto per il riav- Ricaricare il progetto.
vio.
16#0048 Non è stata soddisfatta la condizione per il Disattivare l’oggetto tecnologico
riavvio dell’oggetto tecnologico.
Aggiornamento delle variabili dei blocchi dati (DB) per le istruzioni
Modbus RTU
Sono state aggiornate le variabili dei blocchi dati (DB) per le seguenti istruzioni Modbus RTU:
● Modbus_Comm_Load (Pagina 6)
● Modbus_Master (Pagina 7)
● Modbus_Slave (Pagina 7)
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
A5E03929128-AH, 08/2015 5Aggiornamento delle variabili del blocco dati (DB) Modbus_Comm_Load
La seguente tabella elenca le variabili statiche memorizzate nel DB di istanza Modbus_Comm_Load che possono essere
usate nel programma.
Tabella 3 Variabili statiche del DB di istanza Modbus_Comm_Load
Variabile Tipo di Default Descrizione
dati
ICHAR_GAP Word 0 Tempo di ritardo massimo tra i caratteri. Questo parametro viene
specificato in millisecondi e aumenta il tempo di attesa tra i caratteri
ricevuti. Il numero corrispondente di tempi di bit per questo parametro
viene sommato al valore di default del Modbus pari a 35 tempi di bit
(3,5 tempi di carattere).
RETRIES Word 2 Numero di tentativi che il master effettua prima di generare il codice
dell'errore di risposta assente 0x80C8.
EN_SUPPLY_VOLT Bool 0 Abilita la diagnostica per mancanza di alimentazione L+.
MODE USInt 0 Modo di funzionamento
Sono disponibili i seguenti modi di funzionamento:
• 0 = Full duplex (RS232)
• 1 = Full duplex (RS422) a quattro fili (punto a punto)
• 2 = Full duplex (RS422) a quattro fili (master multipunto, CM PtP
(ET 200SP))
• 3 = Full duplex (RS422) a quattro fili (slave multipunto, CM PtP
(ET 200SP))
• 4 = Semiduplex (RS485) a due fili (vedere la nota più avanti).
LINE_PRE USInt 0 Preimpostazione della linea di ricezione
Sono possibili i seguenti stati iniziali:
• 0 = nessuno (vedere la nota più avanti).
• 1 = Segnale R(A) 5 V / segnale R(B) 0 V (Break):
in questo stato iniziale è possibile effettuare il rilevamento della rot-
tura del cavo.
È selezionabile solo con: “Full duplex (RS422) a quattro fili (colle-
gamento punto a punto)” e “Full duplex (RS422) a quattro fili (slave
multipunto)”.
• 2 = Segnale R(A) 0 V / segnale R(B) 5 V (Break):
questa impostazione di default corrisponde allo stato “idle” (nessu-
na operazione di trasmissione attiva). In questo stato iniziale non è
consentito effettuare il rilevamento della rottura del cavo.
BRK_DET USInt 0 Rilevamento della rottura del cavo.
Sono disponibili le seguenti opzioni:
• 0 = rilevamento della rottura del cavo disattivato
• 1 = rilevamento della rottura del cavo attivato
EN_DIAG_ALARM Bool 0 Attivazione degli allarmi di diagnostica
• 0 = non attivati
• 1 = attivati
STOP_BITS USInt 1 Numero di bit di stop:
• 1 = 1 bit di stop
• 2 = 2 bit di stop
• 0, da 3 a 255 = riservati
Nota
Impostazione necessaria per poter utilizzare i cavi PROFIBUS con il CM 1241 per RS485
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
6 A5E03929128-AH, 08/2015Aggiornamento delle variabili del blocco dati (DB) Modbus_Master
La seguente tabella illustra le variabili statiche memorizzate nel DB di istanza Modbus_Master che possono essere usate nel
programma.
Tabella 4 Variabili statiche del DB di istanza Modbus_Master
Variabile Tipo di dati Default Descrizione
Blocked_Proc_Timeout Real 0,5 Tempo (in secondi) di attesa prima che un'istanza Modbus_Master
attiva bloccata venga rimossa. Ciò può verificarsi ad esempio se si
invia una richiesta del Modbus_Master e il programma smette di ri-
chiamare la funzione del Modbus_Master prima che abbia concluso la
richiesta. Il valore di tempo deve essere maggiore di 0 e inferiore a 55
secondi, altrimenti si verifica un errore.
Extended_Addressing Bool FALSE Configura l'indirizzamento della stazione slave a byte singolo o a dop-
pio byte:
• FALSE = indirizzo di un byte; da 0 a 247
• TRUE = indirizzo di due byte (corrisponde all'indirizzamento am-
pliato), da 0 a 65535
MD_DB MB_BASE - Il parametro MB_DB dell'istruzione Modbus_Comm_Load deve essere
collegato al parametro MB_DB dell'istruzione Modbus_Master.
Aggiornamento delle variabili del blocco dati (DB) Modbus_Slave
La seguente tabella illustra le variabili statiche memorizzate nel DB di istanza Modbus_Slave che possono essere usate nel
programma.
Tabella 5 Variabili statiche del DB di istanza Modbus_Slave
Variabile Tipo di dati Default Descrizione
HR_Start_Offset Word 0 Assegna l'indirizzo iniziale del registro di mantenimento Modbus (de-
fault = 0)
Extended_Addressing Bool FALSE Configura l'indirizzamento dello slave a byte singolo o a doppio byte:
• FALSE = indirizzamento a byte singolo
• TRUE = indirizzamento a byte doppio
Request_Count Word 0 Numero complessivo di tutte le richieste ricevute dallo slave
Slave_Message_Count Word 0 Numero di richieste ricevute per questo slave specifico
Bad_CRC_Count Word 0 Numero di richieste ricevute che presentano un errore CRC
Broadcast_Count Word 0 Numero di richieste di trasmissione ricevute
Exception_Count Word 0 Errori Modbus specifici che richiedono un riconoscimento e la restitu-
zione di un’eccezione al master
Success_Count Word 0 Numero di richieste ricevute per questo slave specifico senza errori di
protocollo
MB_DB MB_BASE - Il parametro MB_DB dell'istruzione Modbus_Comm_Load deve essere
collegato al parametro MB_DB dell'istruzione Modbus_Slave.
Il programma può scrivere i valori nelle variabili HR_Start_Offset e Extended_Addressing e comandare le operazioni dello
slave Modbus. Le altre variabili possono essere lette per controllare lo stato di Modbus.
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
A5E03929128-AH, 08/2015 7Numero massimo di slave Modbus supportati
L’indirizzamento Modbus supporta al massimo 247 slave (numerati da 1 a 247). Ogni segmento della rete Modbus può
contenere al massimo 32 dispositivi a seconda delle capacità di carico e di pilotaggio dell’interfaccia RS485. Una volta
raggiunto il limite di 32 dispositivi si deve usare un ripetitore per passare al segmento successivo. Per poter utilizzare 247
slave collegati a un master attraverso l’interfaccia RS485 sono necessari sette ripetitori.
I ripetitori Siemens sono utilizzabili solo con PROFIBUS e hanno la funzione di controllare il passaggio del token
PROFIBUS. Poiché non sono compatibili con gli altri protocolli per Modbus si dovranno utilizzare ripetitori non Siemens.
I timeout Modbus durano a lungo per default; l’uso di più ripetitori non causa alcun problema di ritardo. Il fatto che uno slave
risponda tardi o che più ripetitori ritardino la risposta non causa alcun problema al master Modbus.
Nota sul cablaggio per gli SB digitali
È stata aggiunta una nota allo schema elettrico dei seguenti SB digitali:
● SB 1223 DI 2 x 24 V DC /DQ 2 x 24 V DC, 200 kHz (6ES7223-3BD30-0XB0)
● SB 1223 DI 2 x 5 V DC /DQ 2 x 5 V DC, 200 kHz (6ES7223-3AD30-0XB0)
● SB 1222 DQ 4 x 24 V DC, 200 kHz (6ES7222-1BD30-0XB0)
● SB 1222 DQ 4 x 5 V DC, 200 kHz (6ES7222-1AD30-0XB0)
Nota
Accertarsi che il conduttore M sia messo a terra in modo sicuro. Se si verifica un guasto nel collegamento di terra per gli SB
con DQ veloci può generarsi una corrente di dispersione sufficiente ad attivare un carico DC. Se le uscite vengono usate per
pilotare carichi DC in applicazioni critiche si deve procedere con particolare cautela e collegare all’SB un secondo filo di
terra.
Modulo PtP con master PROFIBUS CM 1243-5
È importante verificare di aver selezionato le seguenti impostazioni nel DB di istanza per le istruzioni dei seguenti moduli
PtP: modulo PtP CM PtP RS232 BA, CM PtP RS422/485 BA, CM PtP RS232 HF, CM PtP RS422/485 HF o CM PtP con un
master PROFIBUS CM 1243-5 con firmware V1.3.4 e precedente.
● Send_P2P
max_record_len = 240
● Modbus_Master
Send_P2P.max_record_len = 240
● Modbus_Slave
Send_P2P.max_record_len = 240
Proprietà di avviamento della CPU
La tabella 6-2 del manuale del sistema di automazione S7-1200 contiene un errore nel nome delle proprietà di avviamento
della CPU. Il manuale indica come "Compatibilità hardware supportata” una delle proprietà di avviamento che in realtà si
chiama “Confronto tra configurazione prefissata e attuale". Per questa proprietà è possibile selezionare le seguenti opzioni:
● Avvio della CPU solo in caso di compatibilità: Con questa impostazione la CPU si avvia solo se il modulo attualmente
inserito in un posto connettore configurato è compatibile con il modulo configurato.
● Avvio della CPU anche in caso di divergenze: Con questa impostazione la CPU si avvia indipendentemente dal tipo di
modulo inserito.
Il paragrafo della tabella 6-2 che spiega la compatibilità con i moduli è invece corretto.
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
8 A5E03929128-AH, 08/2015Eliminazione e rinomina dei log di dati Gli utenti che dispongono della necessaria autorizzazione hanno la possibilità di eliminare e rinominare i log di dati dalla pagina Web del browser dei file. Se il log di dati non è aperto, il comando di eliminazione o rinomina funziona nel modo previsto. Se si attiva il comando di cancellazione quando il log di dati è aperto, la CPU prima chiude il log di dati, quindi elimina il file corrispondente. Le successive operazioni di scrittura del programma utente restituiscono un errore. Se invece si attiva il comando di modifica del nome quando il log di dati è aperto, la CPU si comporta nel seguente modo: ● La CPU rinomina il file ma non può usare il nuovo nome finché il programma utente non chiude il log di dati aperto. ● Le istruzioni DataLogWrite del programma utente continuano a scrivere nel log di dati aperto utilizzando il nome precedente. Il nome viene modificato quando il programma utente chiude il log di dati con DataLogClose. I set di dati che il programma utente ha scritto con DataLogWrite prima di chiudere il file sono contenuti nel file con il nuovo nome. Se si tenta in seguito di aprire il log di dati con il nome precedente mediante l’istruzione DataLogOpen la CPU crea un nuovo log di dati con il nome precedente. Nota La seconda operazione di rinomina di un file di log di dati non viene eseguita La CPU consente di avviare una sola operazione di modifica del nome di un log di dati per volta. Se se ne avvia una seconda prima che la CPU abbia concluso la prima, l’operazione non viene eseguita, indipendentemente da quanto tempo è trascorso (come spiegato più sopra la prima modifica del nome ha effetto solo dopo che il programma ha chiuso il log di dati). Si potrebbe pensare che la prima operazione di modifica non sia riuscita mentre in realtà non si è semplicemente ancora conclusa. Naturalmente è possibile eliminare e rinominare i file dei log di dati da una memory card SIMATIC SD con Windows Explorer. Il programma utente continua tuttavia cercherà di elaborare il file in base al nome dell’istruzione DataLogCreate. Le operazioni di eliminazione e rinomina effettuare mentre il file è aperto nel programma utente avranno le conseguenze sopra descritte. Se possibile accertarsi che il programma abbia chiuso il log di dati prima di tentare di eliminarlo o rinominarlo, sia dalla pagina Web del browser dei file che da Windows Explorer. Nota Utilizzo della memoria e log di dati Se si rinomina un log di dati dalla pagina Web del browser dei file e poi lo si elimina, la CPU non libera lo spazio di memoria che aveva assegnato quando il programma aveva creato il log di dati. Il server Web elimina il file con il nuovo nome in sé ma, poiché la CPU aveva assegnato la memoria in base al nome originale del file, la memoria assegnata continua a essere occupata. Per fare in modo che la CPU liberi questo spazio di memoria si deve creare un nuovo log di dati con il nome originale e in seguito eliminarlo. Aggiornamento del manuale di sistema S7-1200, edizione 06/2015 A5E03929128-AH, 08/2015 9
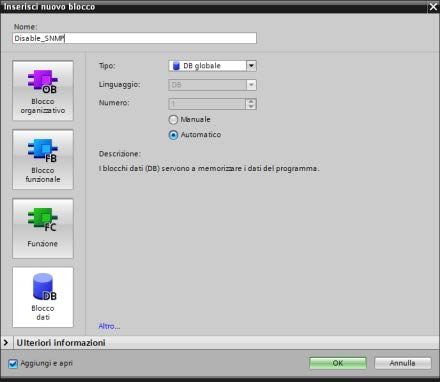
Disattivazione del protocollo SNMP
Per disattivare il protocollo SNMP nella CPU S7-1200 procedere nel seguente modo:
1. Creare un blocco dati (DB) classico:
2. Selezionare le proprietà del DB creato:
3. Selezionare la scheda Attributi. Deselezionare la casella di controllo "Accesso al blocco ottimizzato".
4. Fare clic sul pulsante OK.
Compare un messaggio che chiede di ricompilare il programma. Ricompilarlo direttamente.
5. Nell’interfaccia di blocco del DB classico creare le seguenti variabili statiche con i valori qui indicati. Le variabili potranno
essere utilizzate nel programma per disattivare l’implementazione dell’SNMP:
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
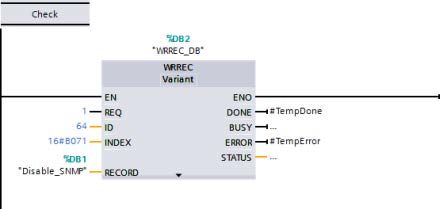
10 A5E03929128-AH, 08/20156. Inserire le seguenti variabili temporanee nell’OB di avviamento (OB100): 7. Utilizzando l’editor KOP inserire un’etichetta (di salto) (che nell’esempio si chiama "Check") e un’istruzione WRREC (Scrivi set di dati) con i seguenti ingressi e uscite nel segmento 1 dell’OB di avviamento (OB100): 8. Inserire il seguente loop e codice di controllo con l’uscita di salto all’etichetta (JMP). Il codice assicura che il richiamo venga portato a termine e che SNMP venga disattivato prima di uscire dall’OB di avviamento: Parametro NEW_PERIOD dell’istruzione CTRL_HSC La tabella 10-2 contiene un’indicazione errata. Il parametro NEW_PERIOD dell’istruzione CTRL_HSC è un valore in millisecondi ed è uno (e uno solo) dei seguenti valori: ● 1000 = 1 secondo ● 100 = 0,1 secondi ● 10 = 0,01 secondi Aggiornamento del manuale di sistema S7-1200, edizione 06/2015 A5E03929128-AH, 08/2015 11
Campo di corrente analogica dell’SM 1231
Tabella 6 Rappresentazione degli ingressi analogici per la corrente (SB e SM)
Sistema Campo di misura della corrente
Decimale Esadecimale 0 mA ... 20 mA 4 mA ... 20 mA
32767 7FFF > 23,52 mA > 22,81 mA Overflow
32511 7EFF 23,52 mA 22,81 mA Campo di overshoot
27649 6C01
27648 6C00 20 mA 20 mA Campo nominale
20736 5100 15 mA 16 mA
1 1 723.4 nA 4 mA + 578,7 nA
0 0 0 mA 4 mA
-1 FFFF Campo di undershoot
-4864 ED00 -3,52 mA 1,185 mA
327671 7FFF < 1,185 mA Underflow (0 ... 20 mA)
-32768 8000 < -3,52 mA Rottura conduttore (4 ... 20 mA)
1 Il valore di rottura conduttore 32767 (16#7FFF) viene restituito sempre indipendentemente dallo stato dell’allarme di
rottura conduttore.
Istruzioni DPRD_DAT e DPWR_DAT (lettura/scrittura coerente dei
dati per gli slave DP)
PROFINET supporta fino a 1024 byte di dati coerenti. Non è necessario utilizzare queste istruzioni per trasferire i dati in
modo coerente tra l'S7-1200 e i dispositivi PROFINET.
Importazione del certificato di sicurezza Siemens per il Web server
Il paragrafo 12.8.3 del manuale di sistema Sistema di automazione S7-1200 spiega come importare il certificato di sicurezza
Siemens per il Web server in modo da evitare che, quando si immette un indirizzo IP per la CPU, compaia un messaggio di
sicurezza e una richiesta di verifica della sicurezza.
Nelle CPU dalla versione V4.1.0 alla 4.1.2 l’importazione del certificato di sicurezza non funziona se tutti gli otteti
dell’indirizzo IP sono maggiori o uguali a 100.
Utilizzo del protocollo USS con il CB 1241
Nota
Se si utilizza la biblioteca del protocollo USS e l’istruzione USS_Port_Scan con un CB 1241, si deve impostare la variabile di
blocco dati LINE_PRE a 0 (nessuno stato iniziale). Se si usa il valore di default “2” della variabile di blocco dati LINE_PRE,
l’istruzione USS_Port_Scan restituisce il valore di errore 16#81AB. La variabile LINE_PRE si trova nel blocco dati associato
all’istruzione USS_Port_Scan (che generalmente si chiama USS_Port_Scan_DB).
Accertarsi che il valore iniziale di LINE_PRE sia impostato a 0 (zero).
Siemens AG
Division Digital Factory
Postfach 48 48
90026 NÜRNBERG
Aggiornamento del manuale di sistema S7-1200, edizione 06/2015 Aggiornamento del manuale di sistema S7-1200, edizione 06/2015
A5E03929128-AH,
12 08/2015 A5E03929128-AH, 08/2015Puoi anche leggere