Progetto EDA ETLAT "Evaluation of State of the Art Thin Line Array Technology" - Roma, 30 Settembre 2019 - Difesa
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

E L E C TRONICS D IV IS ION Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Roma, 30 Settembre 2019
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Scopo del progetto • Comuni cortine idrofoniche trainate hanno dimensioni considerevoli che impattano sul vascello: - Lunghezze di cavo di centinaia di metri - Grandi verricelli pesanti ed ingombranti - Problemi di compatibilità con vascelli di limitato tonnellaggio - Tecnologia dei sensori piezoelettrici matura ma analogica • Cortine sottili (diametro < 30 mm) semplificano integrazione e logistica a bordo: - Volumi contenuti e pesi limitati - Compatibilità con vascelli minori - Possibilità di impiego da UUV/AUV - Possibilità di impiego di nuovi sensori (fibre ottiche) • Ma sono soggette a nuove problematiche: - Maggiore flessibilità/deformabilità e potenziali problemi di stabilità durante il traino - Effetto del flow noise ed altri disturbi esterni sulle misure acustiche © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 2
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Il progetto • 8 partner europei: Leonardo (coordinatore) + CNR-INM (IT), PATRIA + FNRI (FIN), WTD71 (DE), FFI (NO), SAAB + FOI (SE) • Budget circa 4 M€: - 670.000,00 € contributi industriali, - 2.410.000,00 € contributi governativi “in-kind” - 937.991,80 € finanziamenti governativi • Durata: 06/2015 – 12/2018, 42 mesi con 6 stati di avanzamento • Obiettivi: - Caratterizzare il comportamento dinamico di differenti configurazioni geometriche - Caratterizzare il flow noise durante condizioni di traino nominali - Sviluppare metodologie di calcolo per simulare il comportamento idrodinamico e idroacustico di cortine sottili © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 3
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Fasi del progetto
Definizione preliminare configurazioni cortine
Definizione setup Definizione setup caratterizzazione Realizzazione
sperimentale al lago di Nemi dinamica in vasca navale modelli numerici
Realizzazione modelli Confronto ed ottimizzazione
Realizzazione modelli per misure dinamiche modelli numerici
per misure flow noise
Sperimentazione al Caratterizzazione in Misura campo di pressione in
lago di Nemi vasca navale vasca navale
Analisi e confronto Confronto misure Taratura modelli
misure acustiche sperimentali e numerici
risultati numerici
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 4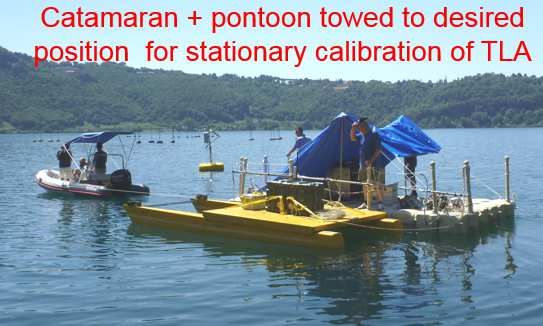
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Deliverables e statistiche
• Due setup di prova per vasca navale
• Infrastruttura e setup di prova al lago di Nemi
• 10 configurazioni geometriche analizzate in vasca navale
• 5 prototipi finali:
- diametro da 9 mm a 32 mm
- lunghezza da 5 a 52 m
- sensori piezo-ceramici e a fibra ottica
- banda di frequenza di lavoro da 5 Hz a 5 kHz
• 25 giornate di test dinamici in vasca navale
• 5 sessioni (8 settimane / 30 giorni) di misure acustiche al lago di Nemi
• Oltre 150 corse con velocità comprese tra 0,5 m/s (1 nodo) e 6 m/s (12 nodi)
• Una settimana di misure di pressione intorno a geometrie TLA in vasca navale
• Svariati modelli numerici e tre differenti codici di calcolo
• 28 report tecnici, 6 report gestione progetto di progetto, 1 documento riepilogativo
• 48 presentazioni
• Documenti disponibili sul sito EDA https://ecp.eda.europa.eu/R/ETLAT/Pages/Home.aspx
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 5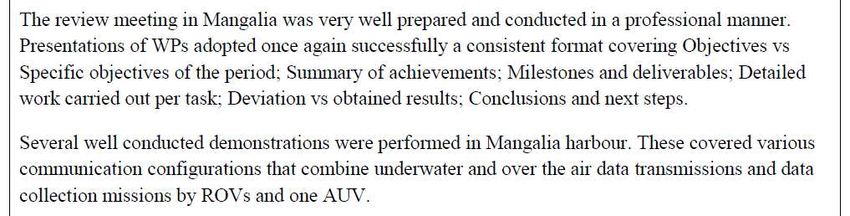
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Prove dinamiche in vasca navale • Misura resistenza idrodinamica al variare della velocità • Registrazioni video nei piani orizzontale e verticale del passaggio cortina • Sviluppo sistema automatico analisi immagini filmato • Ricostruzione quota ed angoli di assetto • Stima vibrazioni © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 6

Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Sviluppo modelli numerici • Studio modelli omogenei e griglie complesse • Simulazioni parametriche caratteristiche materiali • Studio geometrie rettilinee e curvate © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 7

Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Prototipi utilizzati per misure di flow noise • Geometrie stabili in condizioni nominali di traino • 5 prototipi sviluppati (uno per ciascun partner) • Prototipi monotipo: - IT, DE, NO, FIN con trasduttori piezo-ceramici - SE con sensore a fibra ottica © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 8
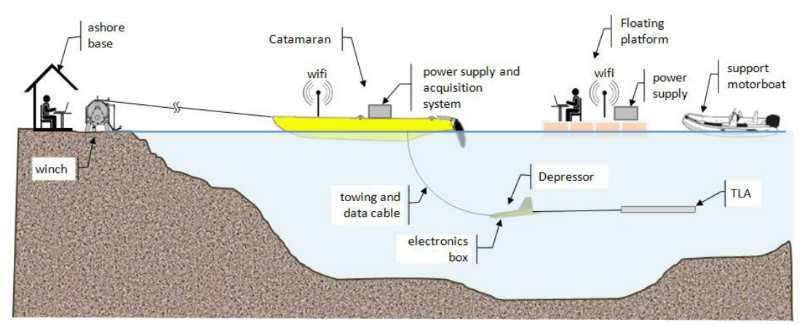
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Setup misure flow noise al lago di Nemi Il setup di prova è composto da: • Un verricello con 500 m di cavo collegato al catamarano • Un catamarano per alloggiare il Sistema di alimentazione e quello di acquisizione/registrazione) • Due depressori (piccolo e medio) • Fairings per la riduzione della resistenza del cavo di traino delle cortine • Sensori per acquisire dati ambientali (direzione e intensità del vento, temperature acqua, ecc.) • Sistema di calibrazione comune fornito da WTD71 © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 9
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
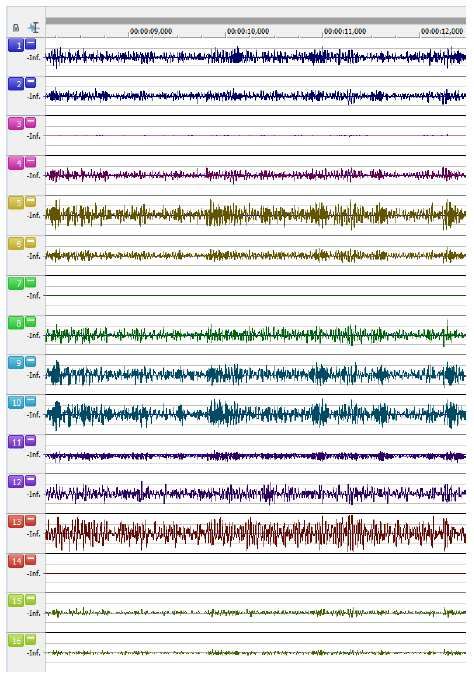
Misure sperimentali a Nemi
• Durante le prove si acquisiscono dati acustici ed inerziali:
• Misure di rumore dai trasduttori acustici
• Misure di quota (depressore e pressometri)
• Posizione (GPS su catamarano)
• Accelerazioni (sensori inerziali nelle cortine)
GPS tracking and video (FOI/SAAB)
• Video moto catamarano
Received signals from antenna - 16
hydrophones with different sensitivity (PATRIA)
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 10Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Analisi acustiche • Analisi acustica dettagliata per estrapolare il flow noise • Uso di spettri di frequenza e di densità di potenza per confrontare geometrie dissimili © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 11
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Risultati raggiunti
• Gestione progetto:
- Progetto completato con rispetto del budget iniziale
- Estensione di 6 mesi per completamento attività sperimentali
- La costante analisi dei rischi ha evitato impatti sul progetto
- Ottima e proficua collaborazione tra tutti i partner
• Tecnico scientifici:
- Sviluppo di modelli numerici per predizione self noise di geometrie TLA: risultati numerici sono in buon
accordo con misure sperimentali, specialmente a basse frequenze
- Studiata la dinamica di geometrie TLA differenti. Realizzati prototipi stabili e trainabili fino a 12 nodi
- Analisi del flow noise indica un buon comportamento a basse velocità (minore di SS1 fino a 4 nodi) ed
influenza di vibrazioni e disturbi «meccanici» ad alte velocità (maggiore di SS6 da 8 nodi)
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 12Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Conclusioni • Confronto tra differenti configurazioni ha consentito di evidenziare vantaggi e svantaggi di ciascuna soluzione. • Sviluppate ed applicate nuove metodologie di test: - verifiche dinamiche in vasca navale, - misure di pressione intorno a geometrie trainate, - misure di flow noise su oggetti trainati. • Setup di Nemi maggiormente rappresentativo di utilizzo a bordo di navi di superficie. • Modelli numerici implementati sono in grado di rappresentare gran parte dei comportamenti reali di antenne trainate sottili: - Simulazioni fluidodinamiche ricostruiscono andamenti qualitativamente in accordo con dati di letteratura; - Modelli strutturali semplificati sono utilizzabili con modelli teorici di propagazione onde in mezzi elastici. • Tutti I partner hanno acquisito conoscenze utili nello sviluppo di questi sensori/sistemi trainati. • Piena soddisfazione dei committenti per i risultati ottenuti © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 13
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Potenziali impieghi operativi
• Le configurazioni testate hanno raggiunto un TRL ≥ 5 • Tutti i prototipi sono affetti da vibrazioni meccaniche e disturbi
• Sensori piezo-ceramici miniaturizzati e sensori a fibra fluidodinamici
ottica hanno comportamenti similari • Alcune geometrie e le connessioni con il cavo devono essere
• Non c’è evidenza di un effetto sostanziale della ottimizzate
geometria sul comportamento acustico • Soluzioni IT, DE, NO, se industrializzate, sono impiegabili a
bordo di navi/UUV
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 14E L E C TRONICS D IV IS ION
Contacts
Ing. Francesco Pacini
Coordinatore progetto ETLAT
francesco.pacini@leonardocompany.com
leonardocompany.com
© 2019 Leonardo - Società per azioni 15Dettagli tecnici progetto ETLAT © 2019 Leonardo - Società per azioni 16
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Configurazione test vasca navale • Il setup deve consentire la verifica visiva della dinamica delle cortine e la misura della resistenza • Misura di resistenza tramite cella di carico installata nel fuso anteriore • Due videocamere Go-pro 4 montate su un supporto a 90°per registrar contemporaneamente sul piano verticale ed orizzontale. © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 17
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Misura sperimentale pressione • Geometria cilindrica rettilinea • Quattro sonde di pressione interne al cilindro con Sistema di registrazione autonomo • Possibilità di rotazione del cilindro • Possibilità di variazione dell’angolo di attacco del cilindro • Matrice di prova: 5 angoli di incidenza x 3 angoli di rollio x 4 velocità = 60 test (240 misure) © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 18
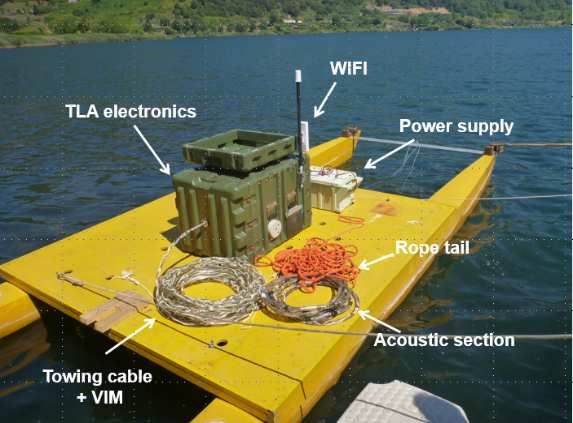
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Dettaglio setup di prova a Nemi • Configurazione tipica catamarano • Pontone con sistema di calibrazione • Sistema di comunicazione wi-fi per controllo remoto traini ed acquisizione dati © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 19
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Misure ambientali a Nemi • Dati ambientali servono per caratterizzare il rumore ambiente • Area di test estremamente silenziosa nel primo mattino e tardo pomeriggio • Aumento di rumore causa vento nel corso della giornata © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 20
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Dettaglio traini a Nemi
• Lunghezza corridoio > 400 m
• Punto di partenza delimitato da una boa rossa
• Punto di arrivo in prossimità della boa gialla WiFi
• Due imbarcazioni di supporto:
- una recupera il cavo fino alla boa rossa,
- L’altra traina il catamarano verso il punto di partenza
TLA electronic
Towing cable
Acoustic section
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 21Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Confronto tra configurazioni e con modelli numerici • Confronto tra spettri di densità di potenza a parità di velocità • Normalizzazione spettri (pressione / ρU2; tempo / d/U) • Dati normalizzati in accordo con letteratura (Chase Spectrum f(velocità del flusso)) © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 22
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Confronto tra dati sperimentali e modelli numerici
• Simulazione di 1 m di cortina cilindrica rettilinea per 1 s
• Modelli omogenei limitano lo smorzamento interno ad alte velocità
• Variazioni di pressione sono l’unica sorgente di rumore numerico
Scaled PSD @ 2 m/s PSD @ 4 m/s
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 23Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Confronto con Sea State (IT) © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 24
Presentazione progetto «SWARMs» © 2019 Leonardo - Società per azioni 25
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology”
Progetto SWARMs «Smart and networking underWAter Robots in cooperation MesheS»
• 30 partner europei da 10 nazioni, coordinati da Università di Madrid
• Budget 17,17 M€
• Durata: 07/2015 – 08/2018, 37 mesi e 3 stati di avanzamento
• Leonardo (WASS):
• Coordinatore del WP5 «Communication & Networking» - 11 partner da 7 paesi
(IT, ES, PT, DE, NO, NL, TK)
• Coordinatore task 6.3 «Vehicle supervision» - 5 partner da 5 paesi (IT, FR, DE,
NO, TK)
• Coordinatore e responsabile della seconda fase dimostrativa (Mangalia –
Romania Luglio 2017) – 29 partner interessati per 3 mesi
© 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 26Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Progetto SWARMs - Risultati WP5 (1/2) • Pieno raggiungimento degli obiettivi di progetto nei tempi previsti e con il budget disponibile • Risultati oltre le aspettative durante la prima demo (M 15): integrazione di 1 punte radio RF + 1 ponte radio Wi-Fi + 1 rete subacquea con 5 nodi • Risultati in linea con le aspettative durante la seconda demo (M25): integrazione di un nodo mobile di superficie, integrazione di 2 ROV e 1 AUV, estensione capacità delle reti RF/Wi-Fi e acustica subacquea • Risultati in linea con le aspettative durante la terza demo (M36): integrazione di 4 nuovi AUV ed un USV, integrazione di un modem HF a bordo di un ROV, massima flessibilità delle reti RF/Wi-Fi ed acustica subacquea con tracciamento dei veicoli, realizzazione e test trasduttore acustico HF, realizzazione e test modem acustico ad alta velocità © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 27
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Progetto SWARMs - Risultati WP5 (2/2) • Rete di comunicazione composta da: - P2P Radwin RF link - Fino a 7 nodi Wi-fi con funzioni AP – AP/R (Ubiquiti Rocket + Ubiquiti Bullet modems e 4 differenti tipi di antenne) • 4 differenti configurazioni di nodi di superficie a bordo imbarcazioni (PLOCAN 1, Arctica, Capella, Maritime Robotics USV) • 5 differenti configurazioni di nodi gateway di superficie (boa flottante PLOCAN 2, boa flottante Leonardo, USV static Leonardo, Manta gateway, Maritime Robotic USV) • 7 differenti veicoli subacquei (ECA robotics A9 AUV, Desistek SAGA ROV, Autonomous ATN50 ROV, Malardalen University NAIAD AUV, NTNU Fjordtif LAUV, Instituto de Sistemas e Robotica Noptilus e Nemo LAUV) • Sperimentati ed integrati 4 diversi modem acustici subacquei: - EvoLogics modello S2CR 18/34 - EvoLogics modello S2CM High Frequency - Waterlinked High Frequency modem - TNO High Speed modem © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 28
Progetto EDA ETLAT “Evaluation of State of the Art Thin Line Array Technology” Progetto SWARMs - Risultati seconda demo – Mar Nero 2017 © 2019 Leonardo - Società per azioni Seminario Capacità delle aziende della subacquea in campo nazionale – Roma, 30 settembre 2019 29
E L E C TRONICS D IV IS ION THANK YOU FOR YOUR ATTENTION leonardocompany.com
Puoi anche leggere