PARTE B TRASPORTI FERROVIARI - Anno Accademico: 2020/21 Docente: Marino Lupi - Scuola di Ingegneria
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Scuola di Ingegneria - Università di Pisa
Anno Accademico: 2020/21
Insegnamento di
TECNICA DEI TRASPORTI TERRESTRI,
MARITTIMI E AEREI
Docente: Marino Lupi
TRASPORTI FERROVIARI
PARTE B
Capacità di una sezione di linea
Si dice sezione di linea: una parte di una linea compresa fra
due stazioni successive A e B (A e B possono essere posti di
movimento: ossia non adibiti al servizio pubblico, ma atti ad
effettuarvi precedenze o incroci). La sezione di linea può
essere a sua volta divisa in più sezioni di blocco.
A
Per potenzialità (capacità) di
una sezione di linea si intende il
numero massimo di treni che può
circolare sulla sezione di linea
nel rispetto di prefissate
condizioni di esercizio.
B
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 2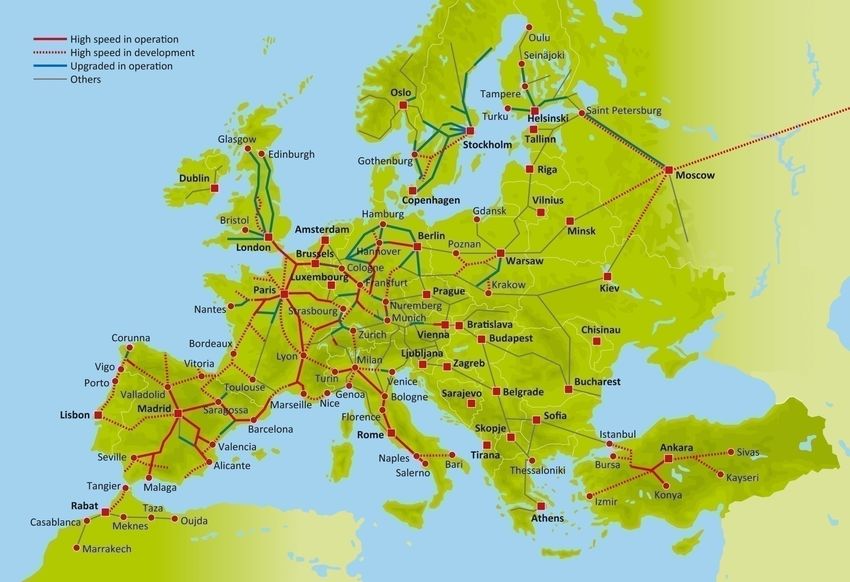
Metodo UIC (Union Internationale des Chemins de Fer): si
assimila il tratto di linea ad un sistema a coda: come viene
fatto per esempio nel caso di una intersezione stradale.
Nel caso di un intersezione
stradale il servizio richiesto
è l’accesso all’intersezione.
Nel caso ferroviario, di una
sezione di linea, il servizio
richiesto è l’accesso alla
sezione di linea.
Se i tempi di servizio, per un certo periodo di tempo, sono
superiori ai tempi di arrivo (fra due arrivi successivi) si
forma una coda (per esempio nel caso di una biglietteria: se
il tempo per fare il biglietto è maggiore del tempo fra gli
arrivi di due utenti successivi).
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 3
b Tempo medio di servizio
ρ=
a
Tempo medio fra due arrivi successivi
Secondo l’UIC deve essere ρ < 0,6 affinché la probabilità
del formarsi di una coda sia trascurabile.
Consideriamo una linea omotachica (treni che vanno alla stessa
velocità)
Il tempo di servizio è dovuto al fatto che bisogna
assicurare la distanza di sicurezza fra due treni successivi.
l’intervallo temporale minimo fra due treni successivi è dato
da:
d min
tmin =
V
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 4
t min
ρ= Dove t a è il tempo di ampliamento
t min + t a
Imponendo che sia ρ ≤ 0,6 si determina il valore del tempo
di ampliamento:
t min
≤ 0,6 t min ≤ 0,6(t min + t a ) t a ≥ 0,4 t min = 0,67t min
t min + t a 0,6
Quindi il tempo medio minimo fra due arrivi successivi,
affinché la probabilità del formarsi di una coda sia
trascurabile, deve essere pari a:
Tempo medio minimo fra due
arrivi (passaggi) successivi
t min + t a = 1,67tmin affinché la probabilità del
formarsi della coda sia
trascurabile ( ( ρ ≤ 0,6) )
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 5
Capacità di una sezione 60 Linee omotachiche di linea 1,67 t min minuti E’ l’intervallo minimo medio fra due passaggi successivi (affinché la probabilità del formarsi della coda sia trascurabile) Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 6

La norma UIC (UCI Code 406 : Capacity) suggerisce un
intervallo minimo secondo lo schema qui sotto riportato.
overlap
Fonte: Hansen I.A, Capacity Estimation Principles and Method , 27-11-2017, https://www.cityu.edu.hk/csie/tbrs/event/[2017-11-
17]Event%20Speakers%20Ppt/HANSEN%20pres%20Capacity%20estimation%20methods%20CityU.pdf
7
Al tempo minimo come è stato calcolato precedentemente parlando dei regimi di circolazione devono essere aggiunti: - il “time for route formation” - il “time for route realese” - il tempo per percorre lo spazio di “overlap”. Esempio: blocco elettrico automatico a circuito di binario a correnti fisse; sezioni concatenate; velocità 150 km/h Assumiamo : - “time for route formation” trf= 10 sec. - “time for route realese” trr= 10 sec - “overlap”= 100 m - Lunghezza treno di massima composizione 420 m Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 8

d min = 200 + 2 L + s0 + l + v(t rf + t rr ) =
150
200 + 2 ⋅ 1350 + 100 + 420 + (10 + 10) = 4254 m
3,6
60
potenzialità ≈ 21 passaggi/h
4,254
1,67 ( 60)
150
Consideriamo però un treno merci di “lunghezza europea” ,
740m, che viaggia ad una velocità di 100 km/h.
d min = 200 + 2 L + s0 + l + v (trf + trr ) =
100
200 + 2 ⋅ 1350 + 100 + 740 + (10 + 10) = 4296 m
3,6
60
potenzialità ≈ 13,9 passaggi/h
4,296
1,67 ( 60)
100
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 9
Esempio: blocco elettrico automatico a circuito di binario a
correnti codificate a 4 codici; sezioni concatenate; velocità
180 km/h
Assumiamo :
- “time for route formation” trf=10 sec.
- il “time for route realese” trr=10 sec
- “overlap”= 100m
- lunghezza treno di massima composizione 420 m
d min = 3L + s0 + l + v (trf + trr ) =
180
3 ⋅ 1350 + 100 + 420 + (10 + 10) = 5570 m
3,6
60
potenzialità ≈ 19 passaggi/h
5,57
1,67 60
180
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 10Esempio: blocco elettrico automatico a circuito di binario a
correnti codificate a 9 codici; sezioni concatenate; velocità
250 km/h
Assumiamo :
- “time for route formation” trf=10 sec.
- il time for route realese” trr=10 sec
- “overlap”= 100m
- lunghezza treno di massima composizione 330 m
d min = 5L + s0 + l + v (trf + trr ) =
250
5 ⋅ 1350 + 100 + 330 + (10 + 10) = 8569 m
3,6
60
potenzialità ≈ 17 passaggi/h
8,569
1,67 60
250
Dagli esempi precedenti si può notare che, nel caso di sezioni
concatenate, la capacità diminuisce all’aumentare della
velocità ( infatti da varia più che linearmente con la velocità).
11Esempio: nuove linee ad alta velocità; velocità 300 km/h;
percorse da ETR 500.
Assumiamo :
- “time for route formation” trf=5 sec.
- il time for route realese” trr=5 sec
- “overlap”= 100m
- lunghezza ETR 500 ≈ 330 m (2 locomotive+ 11 carozze)
Le nuove linee ad alta velocità hanno generalmente sezioni
di blocco di lunghezza 1800m.
ETR 500 a 300 km/h: d a ≈ 9000 m
V 300
d min = L + 5 L + s0 + l + (5 + 5) = 6 ⋅1800 + 100 + 330 + 10 = 12064m
3,6 3,6
da
60
potenzialità ≈ 14,9 treni/h
12,064
1,67 60
300 12Esempio: blocco elettrico automatico conta assi; sezione di
5 km; velocità 140 km/h.
Ammettiamo che la sezione di linea sia costituita da un'unica
sezione di blocco di lunghezza di 5 km. Ammettiamo che il
blocco elettrico sia del tipo conta assi.
Supponendo: V=140km/h e 1350m per la distanza di
arresto (a cui è posto il segnale di avviso) avremo:
d min = 200 + d a + L + so + l + v (t rf + t rr ) =
140
= 200 + 1350 + 5000 + 100 + 420 + (10 + 10) = 7848 m
3,6
60
potenzialità ≈ 10.7 treni/h
7,848
1,67 60
140
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 13Consideriamo però un treno merci di “lunghezza europea” ,
740m, che viaggia ad una velocità di 100 km/h.
d min = 200 + d a + L + so + l + v (t rf + t rr ) =
100
= 200 + 1350 + 5000 + 100 + 740 + (10 + 10) = 7766 m
3,6
60
potenzialità ≈ 7,7 passaggi/h
7,766
1,67 60
100
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 14• Circolazione
omotachica
– linea percorsa da
treni con identica
velocità di
impostazione
– utilizzo ottimale
dell’infrastruttura
• La presenza di un treno
con prestazioni diverse
comporta una riduzione
della potenzialità
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 15Linee eterotachiche
Immaginiamo di avere due classi di treni (nell’intervallo
orario di cui si vuole determinare la capacità):
- Classe “veloce” che va ad una velocità VV
- Classe “lenta” che va ad una velocità VL
Consideriamo, per esempio, di avere un regime di
circolazione a blocco automatico a correnti fisse, il
distanziamento minimo sarà per le due classi :
V
d min = 200 + 2 L + so + l + (10 + 10)
3,6
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 16dm
Li
L i
− dm
i
dm dm dm
VV VV VL VL VV VV
L i
− dm
tvv tvv tll tlv VV
L i
VL
Coppia “veloce - dm Coppia “lento - t = d m
t vv = lento”
ll
VL
veloce” Vv
Coppia dm Coppia L L −d i i m
“veloce- tvl = = tvv “lento- tlv = i
− i
Vv VL VV
lento” veloce”
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 17intervallo temporale minimo
t = tvv pvv + tvl pvl + tll pll + tlv plv
'
m
“assoluto” per linee
eterotachiche
Probabilità di avere le diverse
coppie
60 Tempo medio minimo fra due
Potenzialità
arrivi (passaggi) successivi per
linee 1,67 t m'
linee eterotachiche (metodo
eterotachiche
minuti UIC).
nvv nvl nll nlv
p vv = p vl = pll = plv =
ntot ntot ntot ntot
(Stimo la probabilità con la frequenza relativa)
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 18Esempio di diagramma orario: linee
eterotachiche
VV VL
19
tempoEsempio di diagramma orario: linee
eterotachiche
Si deve “studiare” dove conviene fare le precedenze tempo
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 20Spesso in campo ferroviario tenuto conto:
- dell’utilizzo giornaliero delle linee
- dell’esperienza acquisita definendo i diagrammi orari, in
cui in particolare devono essere organizzate le precedenze
(e gli incroci per le linee a binario unico)
- della pratica dell’esercizio
Si esprima la potenzialità di una linea ferroviaria in termini
di treni giorno:
Dei valori indicativi sono:
250 ÷ 300 treni/giorno per linee a doppo binario
80 ÷ 90 treni/giorno per linee a binario unico
( Comunque, nella pratica dell’esercizio, sono stati
osservati anche valori superiori a quelli su riportati)
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 21RFI nel Prospetto Informativo Rete 2018 (fonte: http://www.rfi.it/cms- file/allegati/rfi_2014/PIR_2018.pdf), definisce dei valori soglia di capacità oraria e giornaliera, per classi di linea. Questa capacità: è funzione delle caratteristiche tipo dell’infrastruttura , dei livelli medi di eterotachia attribuiti alla specifica classe , tiene conto del numero medio di ore di circolazione giornaliera Fonte: http://www.rfi.it/cms-file/allegati/rfi_2014/PIR_2018.pdf, pag.86 Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 22
RFI nel Prospetto Informativo Rete 2022 (fonte:
https://www.rfi.it/content/dam/rfi/offerta/offertaaccessorete/prospetto-informativo-della-
rete/2022-pir/PIR%202022_dicembre%202020.pdf), dà dei valori un po’ differenti.
23Capacità (potenzialità) di una linea
in passeggeri o tonnellate
Cpasseggeri o tonnellate = Ctreno Cn. max treni
[passeggeri]/[ora o giorno] [passeggeri]/[treno] [treni]/[ora o giorno]
[treni]/[giorno]
[tonnellate]/[giorno] [tonnellate]/[treno]
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 24BLOCCO TELEFONICO Regime del giunto L’arrivo di ciascun treno viene comunicato da ciascuna stazione, a quella precedente, a mezzo dispaccio telefonico registrato che viene trasmesso subito dopo il ricevimento o il transito del treno e previo accertamento della sua integrità mediante il controllo del segnale di coda. I segnali di protezione della tratta sono immediatamente posti a via libera: linea normalmente libera. Regime del consenso La stazione posta a monte chiede alla stazione posta a valle esplicito consenso telefonico specificando il numero di treno. I segnali di protezione della tratta sono posti normalmente a via impedita, vengono aperti, dopo ottenuto il consenso, per il tempo strettamente necessario a permettere il transito del treno interessato: linea normalmente bloccata. Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 25
REGIME DEL GIUNTO
La stazione A dichiara alla stazione B l’arrivo o transito del
treno 2. Il treno 4 può essere immesso sulla tratta dalla
stazione B.
A
B
REGIME DEL CONSENSO
La stazione B chiede alla stazione A di poter immettere
sulla tratta il treno 4.
La stazione A esprime il consenso una volta verificato che il
treno 2 è arrivato o transitato.
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 26BLOCCO ELETTRICO MANUALE
istrumenti di blocco
Dispositivi di occupazione/liberazione
A P A
Si tratta di una evoluzione del blocco telefonico con il
regime del consenso
La stazione posta a monte chiede alla stazione posta a valle
esplicito consenso mediante apparecchiatura elettrica.
I segnali di protezione della tratta sono posti normalmente
a via impedita e possono essere aperti, dalla stazione di
monte, ossia l’apparecchiatura permette l’apertura, solo
dopo avere ottenuto il consenso da quella di valle.
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 27Il treno, una volta ricevuto il segnale di via libera, impegna la tratta che non potrà essere impegnata da altri treni in quanto il segnale , di I categoria, di protezione della sezione di blocco, si chiude automaticamente al passaggio del treno sul dispositivo di campagna (pedale, circuito di binario) detto di occupazione. Il posto a valle non può concedere un nuovo consenso se non dopo che il treno, precedentemente inviato, abbia liberato la sezione di blocco agendo su un altro dispositivo di campagna (pedale, circuito di binario) detto di liberazione. Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 28
Istrumento di blocco
Pulsante di richiesta consenso Pulsante di concessione consenso
Maniglia di richiesta consenso Maniglia di concessione consenso
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020- 29
21Stazione PBI PBI Stazione
DM GB GB DM
A A
DM Dirigente Movimento
Sezioni di blocco GB Guardia Blocco
Aumento del traffico inserimento di Posti di Blocco
Intermedio per aumentare la capacità della linea
Linee ad intensa circolazione
Aumento del numero di sezioni di blocco
presenziamento di numerose sezioni di blocco
elevati costi di personale
perditempi per la richiesta e la concessione dei consensi
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020- 30
21A
B
Regime di circolazione a
C
SPOLA (o a NAVETTA)
D
E
Quando su una linea fosse in esercizio un solo mezzo di
trazione , per cui sulla linea non si effettuano incroci o
precedenze, si determina un regime di circolazione detto a
spola (o a navetta).
Lupi M., "Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020- 31
21IL SEGNALAMENTO EUROPEO ERTMS/ETCS All’inizio degli anni 90, la Commissione Europea, nel quadro del rilancio del trasporto ferroviario, rispetto in particolare a quello stradale (che ha forti problemi di impatto ambientale), mise in evidenza che la mancanza dell’interoperabilità ,fra le varie ferrovie europee, era una delle principali ragioni che ostacolava questo rilancio. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 32
IL SEGNALAMENTO EUROPEO ERTMS/ETCS
Nel 1994 la commissione europea decise lo sviluppo di un
sistema di controllo del traffico ferroviario della rete
principale europea. Questa è costituita da tutte le linee ad
alta velocità e dalle principali linee per il trasporto delle
merci (per esempio quella che serve il cosiddetto corridoio
dei due mari Genova- Rotterdam che ora ha preso il nome
di corridoio Reno-Alpi).
Tale iniziativa, è stata portata avanti con il supporto
dell’industria ferroviaria, rappresentata dalle Associazioni
Ferroviarie Europee che hanno sottoscritto, con la
Commissione Europea, Protocolli di Intesa, finalizzati a
promuovere uno sviluppo coordinato del sistema ERTMS
sulla rete ferroviaria principale europea.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 33https://www.mit.gov.it/mit/mop_all.php?p_id=07825
Fonte:
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 34Il progetto ERTMS/ETCS è finalizzato a:
• realizzare un sistema standard di segnalamento;
• realizzare un set standard di normative di esercizio;
• stabilire target comuni di sicurezza;
• definire regole comuni per la validazione e l’omologazione
dei singoli componenti.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 35Fonte: Ferrovie dello Stato italiane- Piano Industriale 2014-2017 (http://www.fsitaliane.it/cms-
file/allegati/fsitaliane/25_03_2014_Piano_industriale.pdf )
36European high speed rail network in 2013 (International Union of Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 37 Railways (UIC))
Cartina più
recente (sempre
UIC)
Fonte: https://uic.org/passenger/highspeed/article/high-speed-database-maps
(accesso febbraio 2020) 38An updated map of the
European high speed rail Questa
network cartina
mette in
evidenza
,con più
precisione,
la velocità
massima di
esercizio
delle
diverse
linee ad
alta
velocità
Fonte: https://www.reddit.com/r/europe/comments/bpedue/an_updated_map_of_the_european_high_speed_rail/ 39Fonte:www.rfi.it.( ultimo aggiornamento: marzo 2013)
IL SISTEMA AV / AC (marzo 2013) 40Fonte: Ferrovie dello Stato italiane- Piano Industriale 2014-2017 (http://www.fsitaliane.it/cms-
file/allegati/fsitaliane/25_03_2014_Piano_industriale.pdf )
41Costo linee ad alta velocità italiane
2002-2009
1997-2008
1996-2008
1994-2005
Torino-Milano: 125 km, 61,6 mil EUR/Km
Milano – Bologna: 182 km, 37,9 mil EUR/Km
Bologna-Firenze: 78,5 km, 75,2 mil EUR/Km
Roma-Napoli: 204,6 km, 27,8 mil EUR/Km
In media (590km): ≈ 44 mil EUR/km
Comunque, più correttamente, i costi, previsti e finali, andrebbero
riportati specificando a quale anno si riferiscono (miliardi lire
anno? Miliardi di euro anno ?). 42●Torino-Milano, 2002 -2009 , 125 km, 7,7 miliardi di euro Ammettiamo che siano euro 2006; 1 euro 2006 =1,19 euro 2020 7,7 miliardi di euro 2006 = 9,16 miliardi 2020; 73,3 milioni euro 2020/ km ● Milano – Bologna, 1997-2008, 185 km, 6,9 miliardi di euro Ammettiamo che siano euro 2003; 1 euro 2003 = 1,26 euro 2020 6,9 miliardi di euro 2003 = 8,69 miliardi 2020; 47 milioni di euro 2020/km ● Bologna-Firenze, 1996-2008, 78,5 km, 5,9 miliardi di euro Ammettiamo che siano euro 2002; 1 euro 2003 =1,26 euro 2020 5,9 miliardi di euro 2000 = 7,4 miliardi 2020; 94,7 milioni di euro 2020/km ● Roma-Napoli, 1994-2005, 204,6 km, 5,7 miliardi di euro Ammettiamo che siano euro 2000; 1 euro 2000 =1,37 euro 2020 5,7 miliardi di euro 2000 = 7,81 miliardi 2020; 38,2 milioni di euro 2020/km ●● 33,06 miliardi 2020 per 593,1 Km : 55,74 milioni di euro 2020 / km
● Autostrada del Sole, 1958-1964, 759,6 km , 300 miliardi di lire.
Ammettiamo che siano lire 1961
1 lira 1961 = 18,61 lire 1999
300 miliardi di lire 1961 = 5583 miliardi di lire 1999 = 5583/1936,27=2,883
miliardi di euro 1999 .
1 euro 1999 =1,40 euro 2020
2,883 miliardi di euro 1999 = 4,04 miliardi di euro 2020
●● 4,04 miliardi 2020 per 759,6 Km : 5,3 milioni di euro 2020 per km
Naturalmente le “epoche” in cui sono stati svolti i due lavori sono
completamente diverse: per i costi della mano d’opera; per la
considerazione dell’impatto ambientale nella progettazione e nella
costruzione di una grande opera.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 44European Rail Traffic Management System (ERTMS).
Si compone di due parti:
- “European Train Control System” (ETCS): è il sistema di
segnalamento vero e proprio, ha come scopo principale
quello di monitorare la velocità del treno ed, in
particolare, imporre la frenatura automatica quando la
velocità è superiore a quella ammissibile.
- “Global System for Mobile Communications- Railways”
(GSM-R): è un GSM dedicato al trasporto ferroviario
(“Railways”). E’ utilizzato: sia per comunicazioni a voce,
sia per trasmettere dati. Il GSM-R è necessario per un
ERTMS di livello 2, o superiore. La sigla identifica un
sofisticato sistema di trasmissione sulla banda di
frequenze nella gamma dei 900 MHz, dedicata in Europa
alle attività ferroviarie.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 45GSM-Railway
Dal 2004, le Ferrovie dello
Stato si sono dotate di una
propria rete di telefonia
mobile GSM-R che oggi (al
31/12/2019) copre di 11.633
Fonte:www.rfi.it .
chilometri di linee nazionali
tradizionali ed alta velocità.
II GSM-R consente:
● Comunicazioni di tipo tradizionale .
● Scambio di informazioni tra i più avanzati sistemi tecnologici di
segnalamento e controllo della circolazione, sia in situazioni normali che in
quelle di emergenza.
● Il collegamento costante dei cellulari dei viaggiatori, anche in galleria
(copertura della restante rete ferroviaria tramite accordi di roaming con
due operatori nazionali di telefonia mobile).
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 46Risultati attesi dall’ERTMS: rendere i treni interoperabili sulle linee principali della rete ferroviaria europea (senza dovere cambiare alle frontiere il personale di macchina o il materiale motore o contemplare a bordo della macchina numerosi diversi sistemi di protezione della marcia ); migliorare il livello di servizio offerto per il traffico: sia merci, sia passeggeri; incrementare la sicurezza del trasporto ferroviario; aprire il mercato della produzione ferroviaria ad una competizione estesa a livello europeo (in realtà la competizione è stata estesa a livello mondiale). Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 47
Fonte:ertms-facts-sheet-7-ertms-deployment-outside-europe,UNIFE,The European Rail Indusry, 2012. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 48
Anche dati più recenti dimostrano che il sistema ERTMS sta
sempre più diventando lo standard di riferimento
internazionale
Fonte:ertms-facts-sheet-7-ertms-deployment-outside-europe,UNIFE,The
European Rail Indusry, 2016.
49ERTMS come standard di sistema di
segnalamento ferroviario a livello mondiale ?
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 50Nell’ambito dell’ ERTMS si distinguono tre possibili livelli operativi per permettere ad ogni ente ferroviario nazionale di stabilire il livello maggiormente appropriato: alle proprie infrastrutture, alle prestazioni volute e alle proprie strategie di investimento anche se l’orientamento è quello di individuare uno standard comune che al momento sembra essere costituito dall’ERTMS di livello 2. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 51
I tre livelli operativi del sistema ERTMS
Occupazione del
Canale di binario Distanziamento
Comunicazione Integrità treno
Livello 1 DISCONTINUO
(Eurobalise) DISPOSITIVI
TRADIZIONALI
DI TERRA SEZIONI DI
BLOCCO FISSE
c.d.b. e conta assi
Livello 2
CONTINUO
(Euroradio) SISTEMI DI
SEZIONI DI
BORDO BLOCCO
Livello 3 (integrità del MOBILI
treno)
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 52ERTMS di livello 1
La “Line
Encoding Unit”
(LEU) elabora
Fonte:www.rfi.it .
le informazioni
provenienti dal
segnale e le
trasmette, in
“linguaggio
ETCS
standard”, alla
La boa commutabile trasmette a sua boa
volta l’informazione al computer di bordo commutabile .
del treno che calcola la curva di
frenatura.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 53E’ un sistema di segnalamento discontinuo: in quanto utilizza per la trasmissione a bordo del treno delle “boe”(dette “Eurobalise”), ossia punti di informazione discreti situati sul binario. Le boe trasmettono un messaggio, detto “telegramma”. Il “telegramma” può essere “fisso”, per esempio perché relativo alla pendenza di un tratto di linea o alla massima velocità che il treno può tenere sulla linea per vincoli di tracciato planimetrico o per condizioni del binario: si parla allora di boa “fissa”. Il “telegramma” può essere “variabile”, per esempio nel caso di un “telegramma” relativo allo stato di un segnale: si parla allora di boa “commutabile”. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 54
Principali caratteristiche di un ERTMS di livello 1.
Sovrapposizione ai sistemi di segnalamento esistenti (per
esempio, nel caso italiano, blocco elettrico automatico a
correnti codificate, con segnalamento laterale ancora
presente).
“Movement Authority” , ossia velocità massima ammessa
(visualizzata sul “cruscotto” (DMI, Driver Machine
Interface), in cabina di guida, al personale di condotta)
attraverso “Eurobalise”.
Verifica dell’integrità del treno attraverso circuiti di
binario. (“Integrità del treno” nel senso che, per
esempio, potrebbe staccarsi un vagone). I circuiti di
binario inoltre permettono di rilevare, automaticamente,
l’occupazione delle sezioni di blocco.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 55PROFILO STATICO E DINAMICO
Problema dell’”infill”
Velocità max della linea
Velocità max del veicolo
VL
EOA
56ERTMS di livello 2
Collegamento radio
fra il treno ed il
“Radio Block Centre”
(RBC) (che centralizza
Fonte:www.rfi.it .
le informazioni
dell’intera linea).
Il “Radio Block Centre” acquisisce lo stato della linea
(sezioni libere/occupate, itinerari impostati), esso è
collegato con gli Apparati Centrali Computerizzati (ACC)
che gestiscono gli enti in linea e nei piazzali (deviatoi,
circuiti di binario).Tutti questi dati costituiscono una
fonte di informazione in base alla quale sono trasmesse le
“Movement Authority” ai treni. 57ERTMS di livello 2
Si realizza il cosiddetto blocco radio: non si parla più di
blocco elettrico, ma di blocco radio per il sistema di
distanziamento treni ossia per il regime di circolazione.
E’ un sistema di segnalamento continuo in quanto c’è un
continuo collegamento fra il treno e il “Radio Block
Centre”.
Scompare il segnalamento laterale.
La curva di frenatura (profilo di velocità massima
ammessa) viene calcolata dal computer di bordo sulla
base della posizione del treno e delle “Movement
Authority” ricevute dal “Radio Block Centre”.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 58Principali caratteristiche di un ERTMS di livello 2. Non c’è più il segnalamento laterale: il macchinista percepisce lo stato dei segnali solo dalla cabina. “Movement authority” attraverso GSM- R La linea continua ad essere divisa in sezioni di blocco. La verifica dell’integrità del treno è ottenuta attraverso i circuiti di binario. Il rilevamento della posizione del treno è ottenuta dalla strumentazione di bordo (odometro). Le boe, che sono solo di tipo fisso, servono per rifasare, continuamente, l’odometro che fornisce quindi una posizione affidabile (le boe funzionano come “pietre chilometriche elettroniche”); inoltre i circuiti di binario forniscono, con alta affidabilità, le parti di linea - sezioni di blocco - occupate e quindi forniscono una conferma della posizione del treno. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 59
L’ERTMS di livello 2 mantiene alcune caratteristiche dei regimi di circolazione di tipo “tradizionale”: • Esistono ancora le sezioni di blocco (generalmente di 1800m sulle nuove linee ad alta velocità italiane). • Rimangono i circuiti di binario: la verifica dell’integrità del treno avviene attraverso i circuiti di binario. “Radio Block Centre” individua la posizione del treno attraverso il segnale proveniente dal computer di bordo che è collegato all’odometro che è continuamente “rifasato” dalle boe di tipo fisso; ma “Radio Block Centre” conosce l’occupazione delle sezioni di blocco attraverso i circuiti di binario. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 60
L’ERTMS di livello 2 è il sistema utilizzato sulle nuove line ad alta velocità italiana: Roma-Napoli, Torino-Milano, Milano- Bologna, Bologna-Firenze. Vedere il filmato: http://www.youtube.com/watch?v=xCS9D1C7DXo La tratta Firenze – Roma (direttissima), come è stato detto, è stata la prima linea ad Alta Velocità italiana, ma presenta ancora il blocco automatico a correnti codificate a 9 codici che permette velocità fino a 250 km/h. È comunque in corso l’adeguamento della direttissima Firenze-Roma a standard AV/AC: recentemente è stato attivato sul tratto Rovezzano-Arezzo Sud il nuovo sistema di distanziamento treni ERTMS di livello 2 . Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 61
Principali flussi di comunicazione tra componenti del
sistema ERTMS/ETCS livello 2
Sistema di
Comando e
Controllo
Base
Transceiver
Station
Nucleo Vitale
Periferico NVP
Posto Periferico Fisso (PPF)
62Fonte: Senesi F., Marzilli E., European Train Ccontrol System, CIFI, 2007.
Architettura dei flussi funzionali principali del sistema
ERTMS/ETCS livello 2
Attuatore: dispositivo elettronico che traduce il comando ricevuto dall’Apparato
Centrale Statico (Computerizzato) nell’opportuno impulso elettrico da inviare
all’ente, a cui fa riferimento, per fare eseguire all’Ente il comando.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 63Principali componenti di un sistema ERTMS:
Eurobalise
Funzione:
trasmettere
dati al treno
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 64Principali componenti di un sistema ERTMS: Radio Block
Centre (Roma Termini - tratta AV/AC RM-NA)
Funzione:
• Acquisire lo stato
della linea (sezioni
libere/occupate,
itinerari impostati)
• Calcolare il
distanziamento dei
treni
• Inviare le MA al
treno tramite rete
GSM-R
• Impostare
rallentamenti
• Invio emergenze 65Principali componenti di un sistema ERTMS: BTS (Base
Transceiver Station)
Funzione:
comunicazione dati:
treno - RBC
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 66Nucleo Vitale Periferico (NVP)
NVP, sigla di Apparato centrale
Computerizzato (ACC o ACS) per
linee AV/AC
Funzione:
gestire gli enti in linea e nel
piazzale (deviatoi, circuiti di
binario) per un estesa ,
generalmente, di circa 12 km
di linea. Comanda e Controlla
gli itinerari nei PPF (Posti
Periferici Fissi: posto
movimento, posto
comunicazione, posto
interconnessione).
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 67Driver Machine Interface ETCS Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 68
Utilizzo dei colori per le visualizzazioni
(cosiddetta “filosofia dei colori”)
Fonte: Senesi F., Marzilli E., European Train Ccontrol System,
CIFI, 2007.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 69Fonte: Senesi F., Marzilli E., European Train Ccontrol System, CIFI,
Tachimetro della DMI
2007.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 70Intervento curva di frenatura ERTMS/ETCS
livello 2
Static Speed Profile)
(Apparato centrale)
Fonte: Senesi F., Marzilli E., European Train Ccontrol System, CIFI, 2007.
71Frenatura di emergenza: superamento velocità
massima ammissibile
Fonte: Senesi F., Marzilli E., European Train Ccontrol System, CIFI, 2007. 72ERTMS di livello 3
E’ stato anche definito un livello ERTMS 3, peraltro ancora
oggi esso non è stato realizzato (esistono dei tratti
sperimentali). Si tratta di un sistema di controllo della marcia
del treno “rivoluzionario” rispetto al passato.
Non prevede
Fonte:www.ertms.com .
l’utilizzo di
dispositivi
tradizionali,
circuiti di binario,
per la
determinazione
dell’ integrità del
treno.
Prevede il cosiddetto blocco mobile: per il quale scompare il
concetto di sezione di blocco e i treni sono alla distanza minima
di sicurezza date le loro rispettive velocità.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 73Ho il blocco radio (sistema continuo), scompare il segnalamento tradizionale laterale e i segnali sono solo in cabina (come peraltro già nel livello II). Scompare il concetto di sezione di blocco su cui è stato fondato, fino ad ora, il sistema di circolazione ferroviaria. Ho il blocco mobile secondo il quale i due treni successivi dovrebbe stare alla distanza minima di frenatura (in generale di sicurezza). In questo modo aumenta la capacità delle linea, inoltre ho un vantaggio economico per la scomparsa degli impianti fissi sulla linea che condizionano anche l’evoluzione del sistema e la sua interoperabilità. Un problema che non sembra di facile soluzione è quello della verifica (che ovviamente deve essere molto affidabile) della integrità del treno con un sistema di bordo. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 74
Principali caratteristiche di un ERTMS di livello 3.
”Autorità al movimento” attraverso GSM- R.
Verifica dell’integrità del treno attraverso una
apparecchiatura posta a bordo del treno.
Rilevamento della posizione del treno attraverso sistema
di bordo. Le boe, che sono solo di tipo fisso, servono per
rifasare, continuamente, la strumentazione di bordo. Il
treno trasmette la posizione al “radio block center” che
“centralizza” la posizione di tutti i treni ed invia le
“autorità al movimento” ai treni.
Presenza di blocco mobile.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 75SCMT (Sistema Controllo Marcia Treno) E’ un sistema pensato per controllare la marcia del treno, la sicurezza della marcia, su tutta la rete non ad alta velocità. E’ un sistema nazionale. Il fine principale è quello di proteggere la marcia del treno, ossia non fargli superare la velocità massima consentita rimanendo trasparente all’operato del macchinista (“trasparente”: il macchinista può continuare a guidare il treno come faceva prima). Per le linee, non ad alta velocità (linee convenzionali), per cui è prevista l’interoperabilità, è previsto che lo SCMT evolverà verso un ERTMS/ETCS di livello 1 ( ma in realtà negli ultimi anni si sta pensando prevalentemente ad un evoluzione del segnalamento sulle linee “storiche” verso livelli di ERTMS/ETCS di tipo 2 e 3). Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 76
Poiché sul “cruscotto”, in cabina di guida, non viene
visualizzata la velocità massima ammessa, si dice che lo
SCMT è semplicemente un sistema di protezione della
marcia ossia un Automatic Train Protection (ATP).
L’ERTMS/ETCS, oltre a garantire la protezione della
marcia del treno, ossia il non superamento della velocità
massima ammissibile, mostra al personale di condotta,
istante per istante, la velocità massima ammessa, si dice,
pertanto, che è un Automatic Train Control (ATC).
Lo fase successiva, a cui si punta, sarà un sistema
“Driverless Automatic Train Operation” (DATO); ossia
senza macchinista. Comunque abbiamo visto a proposito
delle metropolitane leggere (prima), ma ora anche di
quelle pesanti, che sono già da tempo diffusi sistemi
“Driverless” .
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 77Velocità massima ammissibile:
per la linea, date le caratteristiche altimetriche,
planimetriche (tenendo conto del rango, A, B, C, P, del
treno), le condizioni del binario nel determinato tratto e
dati, eventuali, lavori in corso;
per i rotabili, di cui è composto il treno, tenendo conto in
particolare del peso frenato del treno;
per la curva di frenatura (protezione, rallentamento) in
caso di restrizione di velocità, per esempio dovuta alla
presenza di un segnale a via impedita.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 78In caso di superamento della velocità massima ammissibile il sistema comanda la frenatura automatica (in particolare nel caso di superamento di un segnale a via impedita viene comandata la frenatura di emergenza). Il sistema in ogni caso permette la protezione della marcia del treno in numerosi altri casi, rispetto a quelli citati, segnale a via impedita, superamento della velocità massima prevista in piena linea su un determinato tratto, come per esempio: rallentamenti per itinerario deviato; rallentamenti per riduzione lungo il tracciato della velocità massima della linea; riduzione di velocità per rallentamenti provvisori (per esempio per lavori in corso). Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 79
Il sistema SCMT si compone di un “sottosistema di terra” e
di un “sottosistema di bordo”.
Sottosistema di terra
Il “sottosistema di terra” si compone, a sua volta, di boe di
tipo fisso, che emettono informazioni (“telegrammi”) di
tipo fisso, e di boe commutabili, che emettono informazioni
(“telegrammi”) di tipo variabile.
Un “Encoder” elabora le informazioni provenienti dal
segnale e le trasmette alla boa commutabile .
Inoltre il sistema delle boe è basato su una logica detta ad
“appuntamento” secondo la quale una boa comunica al
sistema di bordo la distanza dalla boa successiva . Questa
logica permette di rilevare la non presenza, per guasto, di
un punto informativo.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 80Sottosistema di bordo
Il computer di bordo è in grado di verificare, istante per
istante, se la velocità è al disotto di quella massima
ammissibile: dati i parametri (pendenza, curvatura,
condizione del binario) della linea; data la tipologia dei
rotabili; data la, eventuale, curva di frenatura imposta,
per esempio, da un segnale a via impedita.
E’ un sistema discontinuo, per il quale è stata prevista una
possibile evoluzione verso un ERTMS/ETCS di livello 1 nel
caso di linee interoperabili: le boe sono, per esempio, le
stesse dell’ETCS di livello 1. Comunque in realtà,
attualmente, si sta pensando ad un utilizzo
dell’ERTMS/ETCS anche di livello 2 e di livello 3 sulle linee
cosiddette “storiche”.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 81SCHEMA DI SCMT
Registratore di
eventi (DIS) MMI
ALA
Antenna Freno
Captatore
B.A.C.C.
BALISE Sensori
tachimetrici
ALA =Apparato Logica ATP (“Automatic Train Protection”)
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 82SCMT DMI
Lampada blu Lampada rossa
Tachimetro
Altoparlante
Attivazione sistemi
SCMT G
15:45
N
manovra
Dati
Ripetizione Segnali Continua ↑
130 SV MMI
↑ 100 150 VM
AC RV
Man Machine Interface
Supero Rosso OK
Codici BAcc
120** 270**
120* 180* 270*
AC 75 120 180 270
83Esempio 1: protezione della marcia del treno rispetto ad un
segnale disposto a via impedita.
SST = Sottosistema di Terra SSB = Sottosistema di Bordo
SSB
SST
Fonte:www.rfi.it
Se viene superata la
Velocità di
massima velocità
rilascio
ammessa: segnale
acustico, taglio trazione
G R
e frenatura elettrica, poi
frenatura di emergenza.
In ogni caso se viene superato il segnale a via impedita il
sistema applica la cosiddetta funzione di “Train Trip” attivando
la frenatura di emergenza.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 84Esempio 2: Protezione della marcia del treno rispetto ad
un itinerario deviato.
Vril 30
Il sistema impone
S07d al treno una curva
di rallentamento
Fonte:www.rfi.it .
S01
che viene
V d
trasmessa dalle
30 Km/h
boe collegate al
segnale (che è a
S “via libera per un
percorso deviato”).
La velocità ridotta deve essere mantenuta, come tetto
massimo, per tutto l’itinerario a valle del segnale.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 85Esempio 3: Protezione della marcia del treno rispetto alla alla
variazione della velocità massima di linea.
Punto di Variazione
----
110
----
110
----
110
Parametri di Linea
---- ---- ----
Fonte:www.rfi.it .
PVPL
200 mt 200 mt > 800 mt
150 Km/h
110 Km/h
Il sistema impone al treno una curva di rallentamento che
è trasmessa al treno da boe, di tipo fisso, poste in
precedenza del punto in cui varia la velocità. Tale curva di
rallentamento dipende, in generale, dal tipo di treno (come
abbiamo visto i treni sono divisi in ranghi: A, B, C, P, a
seconda della massima velocità che possono tenere in una
curva di determinato raggio).
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 86Linee attrezzate con
SCMT
(giugno 2018)
Fonte:www.rfi.it . (cartina aggiornta giugno 2018)
Al 31 dicembre
2020 sono 12.653 km le
linee attrezzate con lo
SCMT (di cui 77 con doppio
attrezzaggio SCMT-SSC). 87Sistema di Supporto alla condotta (SSC)
Anche il SSC è composto da due sottosistemi: il sottosistema
di bordo e il sottosistema di terra.
Il sottosistema di terra è costituito da transponder
(collegati o meno ad encoder) (un transponder è una
apparecchiatura che trasmette un determinato segnale in
risposta ad un determinato segnale ricevuto)
Fonte: www.rfi.it .
88I transponder hanno il compito di trasferire sulla locomotiva
l’aspetto del segnale (oppure la velocità massima della linea, o
la velocità massima per rallentamenti).
Il sottosistema di bordo è costituito da:
- un elaboratore che ha il compito di elaborare i dati ricevuti
dal transponder
- una DMI (driver
machine interface)
simile a quella SCMT,
ma semplificata: in
particolare non è
prevista la
sovrapposizione
rispetto al blocco
elettrico automatico
a correnti
codificate).
Fonte:Guido Magenta , CIFI Milano, ”Corso di Cultura Ferroviaria – Il segnalamento Ferroviario , Genova 7 novembre 2014 89Il funzionamento è simile a quello dello SCMT.
Il sistema è “trasparente” all’operato del macchinista:
ossia il macchinista deve operare come faceva prima.
Il sottosistema di bordo, in caso di segnale restrittivo,
calcola, una curva di frenatura . Il macchinista deve
premere, in caso di segnale restrittivo, un pulsante di
riconoscimento della restrizione (deve “fare vedere”al SSB
di essersi accorto del segnale restrittivo), altrimenti parte
la frenatura di emergenza. Inoltre deve stare sotto la
curva di frenatura (che però non gli viene in qualche modo
“mostrata”).
SSC è adatto a linee con velocità ≤ 150 km/h.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 90Linee attrezzate con SSC :
3.2561 km al 31/12/2020 (di
cui 77 km con doppio attrezzaggio
SSC e SCMT).
Fonte:www.rfi.it . (cartina aggiornta 31 dicembre 2008)
SSC
SCMT
BACC
91Con l’introduzione dei sistemi SCMT e SSC è stata ulteriormente aumentata la sicurezza del trasporto ferroviario rispetto a quello stradale. Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 92
Incidente al Posto di Movimento della Bolognina
(7 gennaio 2005)
Fonte:”La tecnica Professionale n.1 , gennaio 2005..
Linea Bologna-
Verona (parte a
doppio, parte ad
unico binario; ora
tutta a doppio
binario).
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 93Incidente al Posto di Movimento della Bolognina
(7 gennaio 2005)
Predisposizione degli itinerari (eventi attesi)
Situazione di fatto (eventi accaduti)
Fonte:”La tecnica Professionale n.1 , gennaio 2005
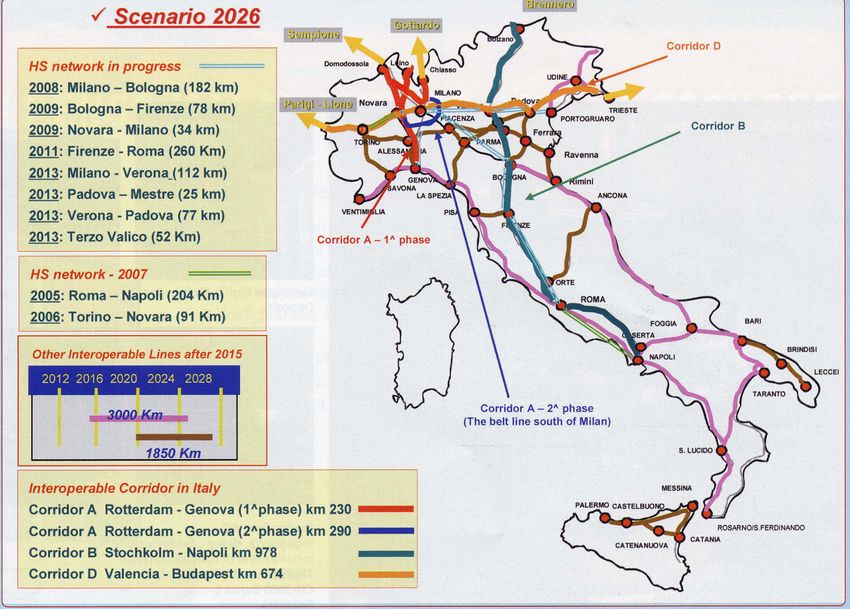
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 94Linee ferroviarie interoperabili al 2026 (Linee AV/AC +
corridoi interoperabili+ altre linee)
Circa 7. 500 Km di rete interoperabile [ 45% di tutta la rete RFI (16.850 Km) ] (100%
HS/HC net (1.115 Km)) + 40% (6.385 Km / 15.750 Km) CR (core railway) net: corridors
A,B,D + other lines)
Fonte:Foschi U. Iomazzo C., ”RFI - Migration Strategy”,
La Tecnica Professionale n.12 , dicembre 2007..
95- 38 km su binario unico
Linea pilota Livello 1 + Radio Infill - linea elettrificata
- DCO, apparati ACEI
- blocco conta-assi (~19km)
- blocco a correnti fisse
(~19km)
- automotrici diesel
- 2 fornitori sia per SST che
SSB
- velocità massima = 130 km
Fonte: Bonafé G., Senesi F.,Applicazioni ERTMS/ETCS su linee convenzionali RFI, Bologna 28 ottobre 2013.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 96ERTMS/ETCS Livello 2 Treviglio –
Brescia nuova
linea AV
(parte della
Milano –
Venezia)
Fonte: Bonafé G., Senesi F.,Applicazioni ERTMS/ETCS su linee convenzionali RFI, Bologna 28 ottobre 2013.
Lupi M.,"Tecnica dei Trasporti Terrestri, Marittimi e Aerei", Scuola di Ingegneria, Università di Pisa, A.A. 2020-21 97Sistema di individuazione della posizione del treno basato su satelliti, alternativo a
quello normalmente usato su ERTMS/ETCS, basato sulle eurobalise.
Sono in corso anche sperimentazioni per
utilizzare su linee convenzionali (non ad
alta velocità) anche l’ERTMS/ETCS di
livello 3 , a blocco mobile.
Fonte: Bonafé G., Senesi F.,Applicazioni ERTMS/ETCS su linee convenzionali RFI, Bologna 28 ottobre 2013. 98Puoi anche leggere