Introduzione al corso di Meccatronica-Domotica - A.A. 2019-20 - Unisalento
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Introduzione al corso di Meccatronica-Domotica
A.A. 2019-20
Docente del corso: Ing. Nicola Ivan Giannoccaro, Ing. Marco
Milanese
Studio docenti: Corpo O II piano, Edificio Multipiano
Email: ivan.giannoccaro@unisalento.it;
marco.milanese@unisalento.it
Informazioni durante il corso:
https://www.ingegneria.unisalento.it/scheda_personale/-
/people/ivan.giannoccaro/bacheca
Orario di ricevimento:
Martedì e Mercoledì ore 15.00-17.00
Programma del corso Programma del corso di Meccatronica-Domotica A.A.2019-2020 Corso di Laurea in Ingegneria delle Tecnologie Industriali 6 CFU Ing. Nicola Ivan Giannoccaro, Ing. Marco Milanese Obiettivi del corso: Il corso affronta le problematiche riguardanti i dispositivi misti meccanici - elettronici presenti nell'automazione industriale e nella domotica e presenta alcune applicazioni caratteristiche al riguardo. Vengono, in particolare, analizzati, la centrale di controllo, le tipologie di sensori e di attuatori, i sistemi di comunicazione, le interfacce utente, i livelli d’integrazione sia descrivendo le tipologie costruttive e funzionali degli strumenti atti al rilievo delle tipiche grandezze fisiche, sia i componenti di interfaccia e la strategia di regolazione. Viene, infine, acquisito il significato di “casa intelligente” che si realizza attraverso un processo d’integrazione tra i diversi impianti e le diverse tecnologie adottate e tra gli stessi impianti e l’edificio. Programma Argomento 1: Introduzione al corso, definizione di sistema meccatronico, esempi di progetti meccatronici, definizione di domotica: obiettivi e vantaggi. Argomento 2: Modellizzazione di un sistema, tipi di ingresso, concetto di funzione di trasferimento .Analisi della risposta in frequenza, cenni sulle procedure di linearizzazione, algebra degli schemi a blocchi. Argomento 3: Concetto di sistema di regolazione, struttura tipica di un sistema di regolazione, sistemi di regolazione di tipo 0,1 e 2, indici di errore, regolazioni fondamentali (P,PI,PID). Trasmettitori e ricevitori, esempi di dispositivi controllati. Argomento 4: Classificazione dei segnali da acquisire, campionamento, quantizzazione, conversione A/D, problematiche di acquisizione di segnali analogici, fenomeno dell’aliasing, filtri antialiasing, filtri digitali. Argomento 5: Definizione di servomeccanismi, azionamenti elettrici, regolatori elettronici utilizzanti amplificatori operazionali, regolatori digitali, schede di controllo. Argomento 6 Sensori in meccatronica: estensimetri a variazione di resistenza, accelerometri, encoder assoluto ed incrementale, Inertial Measurement Unit, sensori di prossimità pneumatici elettrici ed ottici, sensori di distanza, sensori ad ultrasuoni, sensori tattili. Argomento 7: Tipologie di errori, definizione dei parametri più significativi del comportamento statico, propagazione degli errori. Argomento 8 Struttura generale di un impianto domotico: attuatori, comandi e sensori, mezzi trasmissivi, protocolli. Funzioni di un impianto domotico. Le problematiche d’integrazione in un sistema domotico. L’architettura di un sistema integrato. Le interfacce utente. La progettazione integrata degli impianti. Esercitazioni Argomento : Utilizzo e programmazione di schede di acquisizioni commerciali (Arduino, NI) per la regolazione controllata di attuatori nell’ambito della domotica. Testi d’esame consigliati: Sorli M., Quaglia G.:"Meccatronica vol.1 ", Politeko, Torino, 1999. Sorli M., Quaglia G.:"Applicazioni di Meccatronica", CLUT Editrice Torino, aprile 1996. Ricci L., “Sistemi di domotica applicata per una casa intelligente” Dario Flaccovio Editre, 2015. Trisciuoglio D. “ Introduzione alla domotica” Tecniche Nuove, 2009. Modalità d’esame: L’esame verterà in una prova orale inerente gli argomenti trattati nel corso e nella eventuale discussione di un progetto d’anno.

Definizione di meccatronica
Meccatronica è definita come il campo di studi che comprende l’analisi,il progetto, la sintesi
e la selezione di sistemi che combinano sistemi meccanici ed elettronici con controlli
moderni e microprocessori.
Per sviluppare prodotti di elevato
livello è necessario che i progettisti
dell’area meccanica abbiano
sufficienti conoscenze nel campo
elettronico e del controllo e
viceversa.
Ing. N.I.Giannoccaro
Definizione più recente
Una definizione ancora piu’ completa
introduce anche la teoria del
controllo nelle discipline che
costituiscono la meccatronica.
Storia del termine meccatronica
Il termine ‘meccatronica’ è stato coniato nel 1969 dall’azienda giapponese Yaskawa
(Fukuoka) azienda produttrice di motori elettrici ed indica la congiunzione fra sistema
meccanico, elettrico e di calcolo al fine di realizzare un prodotto ottimale.
Ing. N.I.Giannoccaro
Definizione letterale
La meccatronica è un’area interdisciplinare
dell’ingegneria che combina ingegneria meccanica
ed elettrica e scienza dell’informazione. Un tipico
sistema meccatronico preleva segnali dall’ambiente,
li processa per avere segnali di uscita,
trasformandoli, ad esempio, in forze, movimenti ed
azioni.
L’aspetto più importante di un sistema meccatronico
è l’estensione e il completamento del sistema
meccanico con sensori e microcomputer.
Tipico per tale prodotto è l’elevato aumento di conoscenza sia del sistema sia del
software necessario nella sua progettazione. Inoltre il software è diventato una parte
integrale del prodotto stesso, necessario per la sua funzione e operazione. E’
pienamente giustificato dire che il software è diventato un ‘elemento macchina’.
Esempi Esempi di sistemi meccatronici: -robot -motori a combustione controllata digitalmente -cuscinetti magnetici senza contatto - veicoli a guida automatica -controllo di aerei in volo e sistemi di navigazione -sistemi di frenaggio non bloccanti e iniezione elettronica; -sistemi di produzione automatizzati; -centri di produzione a controllo numerico; -organi artificiali; -sistemi di monitoraggio della salute; -organi chirurgici; -macchine fotocopiatrici; Argomenti specifici dell’Ingegneria meccatronica • modelizzazione e progetto • motion control • vibrazioni e controllo del rumore • attuatori e sensori • micro dispositivi e sistemi microelettronici • intelligent control • robotica • manufacturing

Esempi di sistemi meccatronici
Principio del cuscinetto magnetico attivo
Il cuscinetto attivo elettromagnetico è il principio che è attualmente più spesso usato tra
le sospensioni magnetiche. Un sensore misura lo spostamento del rotore dalla sua
posizione di riferimento, un microprocessore, come un controllore, deriva un segnale di
controllo dalla misura, un amplificatore di potenza trasforma questo segnale di controllo
in un segnale di corrente e la corrente di controllo genera le forze magnetiche tramite il
magnete in maniera che il rotore rimanga nella sua posizione.
La legge di controllo è responsabile per la stabilità dello stato di sospensione così come
per la rigidezza e lo smorzamento della stessa sospensione.
Esempi
Protesi al ginocchio controllata
Questo esempio è relativo ad una cooperazione uomo-
macchina. La protesi sopra-ginocchio può essere vista
come un robot che, almeno parzialmente, riproduce la
funzionalità della camminata umana. Quando la protesi
normale deve seguire un percorso abbastanza
complesso, un controllo intelligente della protesi è stato
scelto come alternativa ai metodi classici.
L’approccio selezionato è tale che il comportamento
del sistema è governato da un insieme finito di regole. I
parametri pre-definiti sono combinati in funzione della
conoscenza base del sistema. Il primo obiettivo è
basato sulla identificazione dell’andatura dalle misure
on-line. Quindi il controllo dell’andatura calcola i livelli
di smorzamento del moto del ginocchio in dipendenza
delle varie fasi di andatura.
Un prototipo da laboratorio di una tale protesi
controllata è stato costruito e valutato in una clinica di
riabilitazione, mostrando numerosi vantaggi sulla
classica protesi.
Esempi
Robot antimine in dotazione all’esercito italiano
Questo esempio è relativo ad un braccio robotizzato a 4 gradi di libertà + gripper
di presa finale avente un ulteriore doppio grado di libertà.
Il robot è teleguidato da un telecomando che permette la rotazione dei 4 giunti del
braccio, del gripper e del giunto che sorregge il gripper.
E’ in dotazione dell’esercito italiano.
E’ effettivamente un sistema meccatronico?Esempi: braccio robotizzato traduttore
Ing. N.I.GiannoccaroIntegrazione fra le parti di un progetto meccatronico
Gli elementi generalmente presenti in un prodotto meccatronico sono i seguenti:
-trasduttori;
-controllo
- interfacce;
-attuatori;
-cinematismi e strutture meccaniche.
Questi elementi sono la base per poter progettare le ‘macchine intelligenti’.
Ing. N.I.GiannoccaroIntegrazione fra le parti di un progetto meccatronico
L’ingegnere meccatronico deve non solo avere una buona conoscenza di questi settori, ma
possedere una visione globale, che gli permetta di progettare l’intero sistema.
Occorre sottolineare che l’ingegnere meccatronico deve saper pensare in termini di ‘sistema’,
conoscendo tutti i componenti importanti di tale sistema e padroneggiando i vari aspetti, in
relazione alla sua funzione e alle sue caratteristiche statiche e dinamiche.
Le prestazioni finali del sistema, infatti, sono influenzate dalle interazioni reciproche di tutti questi
elementi.
E’ richiesta una capacità di scelta dei componenti ed anche la padronanza di tecniche di
modellazione in grado di verificare e prevedere se le scelte fatte conducono alle prestazioni volute.
Ing. N.I.GiannoccaroLa robotica come esempio di sistemi meccatronici
L’ipotesi di realizzare un automa ha stimolato
l’immaginazione umana fin dai tempi antichi, ma solo con
la nascita della computer science queste straordinarie
macchine sono diventate realtà.
Il termine robot viene usato per la prima volta in un testo
teatrale intitolato R.U.R. scritto nel 1920 dall’autore ceco
Karel Capek, dove sta ad indicare una generazione di
esseri superficiali sviluppati per lavorare a basso costo nel
settore industriale (‘robota’ in ceco significa lavoro
forzato).
Ing. N.I.GiannoccaroAndroidi
Il vocabolo ‘androide’ deriva dal greco antico ‘androeides’ che significa ‘antropomorfo, di forma
umana’. Qualsiasi robot dotato di un aspetto anche solo vagamente umano viene detto oggi
androide.
Come vengono costruiti gli androidi?
Costituto da uno scheletro realizzato con materiali leggeri ma nello stesso
Scheletro tempo resistenti, per riprodurre il più fedelmente possibile le ossa umane.
Realizzati con efficienti motori, tubi pneumatici o leghe a memoria di forma che
Muscoli si contraggono o si espandono in maniera simile ai muscoli naturali.
Occhi: generalmente sono utilizzate piccole telecamere digitali; possono essere
inseriti all’interno di bulbi oculari.
Testa Orecchie: si utilizzano microfoni stereo.
Sistema vocale: si utilizzano altoparlanti standard o meccanismi vocali che
riproducono in modo fedele la voce umana.
Naso: in via di sviluppo.
Per gli attuatori destinati ad azionare le braccia sono utilizzati motori elettrici o
Gambe e braccia idraulici o sistemi pneumatici. I motori piezoelettrici sono utilizzati per movimenti
minimi e precisi.
Sono ampiamente utilizzate batterie ricaricabili unitamente a sensori in grado di
Sorgenti di energia avvisare la macchina quando si rende necessaria la ricarica. In alternativa si
utilizzano le batterie a radioisotopi (con materiale radioattivo) o le celle a
combustibile che combinando idrogeno ed ossigeno ottengono acqua ed energia.
Ing. N.I.GiannoccaroAndroidi Ing. N.I.Giannoccaro
Esempio di sistema meccatronico: robot bipede
Dotato di straordinarie capacità, Asimo è
diventato il robot umanoide più famoso del
mondo (fatto dalla Honda).
Per sviluppare robot capaci di camminare, gli
ingegneri della Honda hanno compiuto studi
dettagliati sui movimenti degli esseri umani e
degli animali, osservandone le articolazioni, lo
spostamento del peso durante il moto e l’azione
dei muscoli. Anche se camminare potrebbe
sembrare semplice la macchina che sta alla
base di questa azione è incredibilmente
complessa; basti pensare alla difficoltà di dover
controllare ogni singola articolazione e, nel
contempo, analizzare la postura del proprio
corpo, la velocità del movimento e la posizione
del baricentro.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot bipede
Ogni arto di ASIMO è un sistema molto
complesso:braccia e gambe sono dotate di 6 gradi di
libertà e ricreano un livello di flessibilità paragonabile a
quello degli arti umani. Ogni giunto è mosso da un
servomotore potente ma compatto, controllato da
processori centrali del robot.
ASIMO può anche muovere la testa con 3 gradi di
libertà come gli esseri umani.
Può correre alla velocità di 3 km/h effettuando un
passo ogni 0.36 secondi. Il suo tempo di sospensione
è di 0.05 secondi.
ASIMO ha molte abilità oltre a quelle motorie: le sue
telecamere gli consentono di vedere e, grazie a tali
occhi, non solo riconosce forme prememorizzate, ma
le distingue anche guardandole da diverse
angolazioni.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot bipede
Video dimostrativo Asimo, museo delle scienze di Tokyo,Marzo
2015
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot artificiere
Quando viene trovato un ordigno può essere di vitale importanza l’uso di robot telecomandati in
grado di sventare la minaccia permettendo agli operatori umani di rimanere a distanza di sicurezza.
Essi agiscono o disattivando l’ordigno tramite un’esplosione ‘controllata’ che distrugge senza
innescare la carica principale oppure rendendo inattive le parti meccaniche o elettroniche interne
sparando un proiettile o un getto d’acqua ad alta pressione.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot artificiere
In realtà esiste un’ampia gamma di robot artificieri ed ognuno di essi è progettato per adempiere ad
appositi compiti di disinnesco. Le telecamere montate sui robot aiutano gli operatori a seguire le
fasi di movimento e a controllare con precisione gli strumenti. Sono usati anche strumenti a raggi X.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot demolitore
La demolizione di molte strutture, quali edifici,
ponti e tunnel, è un processo complesso che
può mettere a repentaglio l’incolumità degli
operatori; esistono robot controllabili a distanza
(con collegamenti via cavo o wireless), per
mezzo di telecomandi del peso di soli 3 kg.
Questi telecomandi possono essere utilizzati
sul posto da operatori che, di volta in volta,
cambiano posizione per osservare il lavoro
della macchina dal punto di vista migliore.
Generalmente sono alimentati elettricamente e
possono essere impiegati anche in spazi
ristretti e privi di ricambio d’aria, come tunnel e
sotteranei.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot demolitore
Utensili sono montati sui bracci dei robot lavorando in modo simile a martelli pneumatici ad elevata
potenza: martelli idraulici per abbattere muri di mattoni, frantumatori, cesoie, polverizzatori e benne
per rimuovere i detriti.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot ospedalieri
I robot ospedalieri iniziano il loro viaggio in farmacia dove un operatore riempie i suoi vani con gli
oggetti da consegnare, ponendoli prima in particolari contenitori dotati di nomi e codici a barre dai
quali è possibile ricavare informazioni relative ai singoli pazienti destinatari.
Il robot inizia le consegne portando il suo carico nelle varie aree infermieristiche collocate
nell’ospedale, utilizzando segnali radio per comandare gli ascensori e aprire le porte. Durante le
consegne il robot è in grado di gestire piccoli problemi, ad esempio nel caso non fosse presente
nessuno per il ritiro di un farmaco il robot può avvisare l’operatore.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot climber
Uno dei robot più grandi che siano stati mai costruiti ha mosso i primi passi nel 2005 in Friuli:è una macchina di
3,8 tonnellate in grado di prevenire le frane ,stabilizzando e compattando le aree a rischio di cedimento con la
costruzione di barriere fisiche ed ancoraggi che assicurino gli elementi a rischio alla terraferma. La macchina è
comandata a distanza e si basa su un sistema di azionamenti idraulici per arrampicarsi sulle pareti rocciose delle
montagne. Dotata di 4 zampe che muove l’una dopo l’altra per guadagnare quota o muoversi lateralmente può
trivellare fori nella roccia che raggiungono i 20 m di profondità.
Progettato per riuscire a lavorare su pendenze che raggiungono i 30°, con l’aiuto di cavi e organi può muoversi su
superfici con inclinazioni di 85° e inclinazioni di 80 m.
Il robot è equipaggiato con una trivella a percussione azionata elettricamente;la corrente elettrica e l’aria
compressa usate dal robot sono prodotte da un generatore e da un compressore montati al suo interno.
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: robot di soccorso
Il robot da soccorso dovrebbe resistere a temperature estreme ed essere sottoponibile a
decontaminazioni da sostanze tossiche. La struttura fisica del robot dovrebbe rispettare alcuni
importanti principi:
-colorazione tale da renderlo visibile;
-movimentazione che avvenga silenziosamente e senza causare sollevamento di polvere;
-nelle missioni notturne possono essere utili sistemi di visione notturni;
-possono essere equipaggiati con rilevatori di ossigeno e anidride carbonica
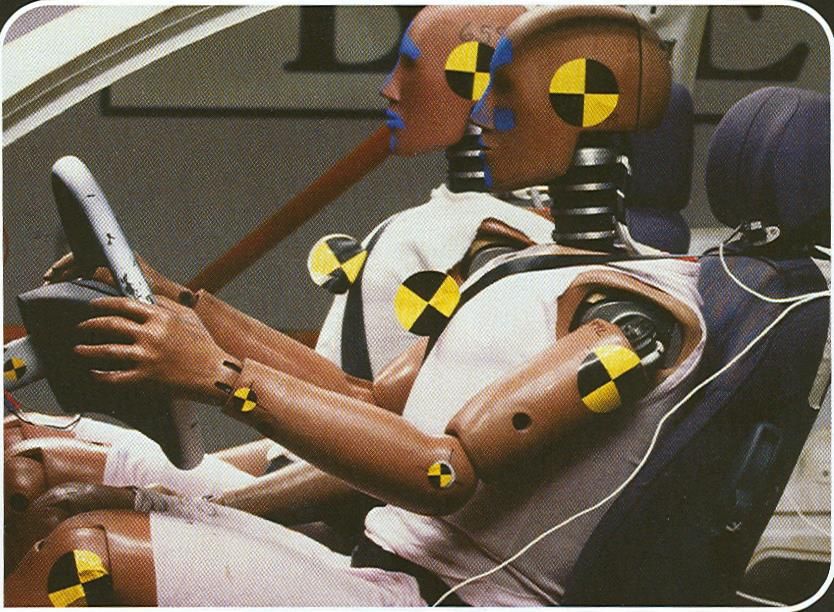
Ing. N.I.GiannoccaroEsempio di sistema meccatronico: crash robot
I crash robot non sono manichini umani ma concentrati di tecnologia robotica che riproducono
con elevata fedeltà le caratteristiche biomeccaniche dell’uomo, cioè le sue reazioni alle forze
interne ed esterne, applicate sull’organismo sia in movimento sia a riposo.
La cavità toracica, ad esempio, è ricostituita con costole in metallo, il collo in gomma subisce gli
stessi allungamenti e flessioni di quello umano, così cme ogni articolazione. Inoltre i crash robot
sono dotati di decine di sensori di vario tipo: normalmente 3 accellerometri vengono posti
all’interno dei crash robot per tenere conto delle accellerazioni cui è sottoposto il cervello, il collo
è sottoposto alla misura delle torsioni e flessioni, sulle ginocchia sono misurate le forze dovute
agli impatti frontali che si verificano contro il cruscotto o il volante, , le costole sono in grado di
registrare le flessioni della gabbia toracica e l’intensità con le quali avvengono.
Ing. N.I.GiannoccaroEsempi
Robot cameriere (Giappone)
Ing. N.I.GiannoccaroEsempi
Hotel gestito da robot (Giappone, 2015)
La mansione sembra l'ideale, visto che gli
androidi creati dalla società Kokoro sono
modellati secondo le sembianze di giovani
donne giapponesi. Ma l'aspetto esteriore non
è la parte più interessante di loro. Tutte le
unità sono in grado di parlare giapponese,
cinese, coreano e inglese: un'abilità che le
rende un vero asset nelle strutture
alberghiere.
Inoltre, questi androidi sono in grado di
imitare il comportamento umano e
rispondere in modo adeguato secondo il
linguaggio del corpo e il tono usato dai loro
interlocutori. Se tutto andrò come previsto, ai
10 robot iniziali ne verranno affiancati altri
che provvederanno a tutti i servizi dell'hotel:
pulizia delle camere, trasporto bagagli e altre
mansioni. L'obiettivo è portare i robot a
occuparsi del 90% delle funzioni.
Ing. N.I.GiannoccaroEsempi
Video dimostrativo Halluc II (Chiba Institute of Technology),
museo delle scienze di Tokyo,Marzo 2015
Ing. N.I.GiannoccaroEsempi
Video dimostrativo di Gundam, Odaiba Tokyo,Marzo 2015
Ing. N.I.GiannoccaroPuoi anche leggere