Il pendolo di Wilberforce studiato con RTL Prototipo di apparato sviluppato nell'ambito del progetto IRDIS
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Il pendolo di Wilberforce studiato con RTL
Prototipo di apparato sviluppato nell’ambito del progetto IRDIS
Giacomo Torzo e Michele D’Anna
Il pendolo di Wilberforce1 è un dispositivo che è stato spesso usato in dimostrazioni in aula
per mostrare il sorprendente fenomeno dell’accoppiamento tra oscillazioni torsionali e
longitudinali in un sistema massa-molla che produce battimenti.
L’effetto sorprendente consiste nel fatto che ad un osservatore lontano (che non nota
l’oscillazione torsionale) sembra che l’oscillazione verticale dapprima si smorzi fino a cessare,
poi, senza intervento esterno prende a crescere nuovamente come se fosse spinto da una
invisibile forza.
Questo dispositivo ha stuzzicato la curiosità di molti 2 (tra cui il famoso Arnold Sommerfeld,
che ne ha fornito una esauriente trattazione teorica3) e recentemente il fenomeno è stato
anche studiato con l’aiuto di un sistema RTL (sonar interfacciato a calcolatore) con cui si è
misurata l’oscillazione verticale 4, ma nessuno aveva fin’ora caratteri zzato il moto di un
pendolo di Wilberforce in modo completo con RTL (sia le oscillazioni longitudinali che quelle
torsionali accoppiate).
In questo lavoro si mostra come ciò sia possibile usando, oltre al sonar (per la misura della
traslazione verticale) anche un sensore di rotazione ottico senza contatto (per la misura della
oscillazione torsionale).
Il sensore di rotazione senza contatto 5 sfrutta la modulazione di intensità di un raggio di luce
polarizzata (emesso da un LED posto dietro un polarizzatore rotante azionato da un
motorino) e rivelato da un fotodiodo dopo esser stato riflesso da un secondo polarizzatore
solidale con la massa rotante.
1
Prende il nome da R.L. Wilberforce, un docente di fisica presso i Laboratori Cavendish, che
nel 1894 mostrò come una massa cilindrica appesa ad una molla elicoidale possa
sostenere oscillazioni torsionali e longitudinali , pubblicando poi un articolo su
Philosophycal Magazine 38, 386 (1895)
2
U. Köpf : Wilberforce’s pendulum revisited, Am.J.Phys. 58, 833 (1990), R.E.Berg, T.S.
Marshall: Wilberforce pendulum oscillations and normal modes, Am.J.Phys. 59, 32 (1991),
F.G.Karioris, Wilberforce pendulum, demonstration size: The Phys. Teacher 31 , 314
(1993)
3
A. Sommerfeld, Mechanics of deformable bodies: lectures on theoretical physics II,
Academic, New York, 1964.
4
E. Debowska, S. Jakubowicz, Z. Mazur: Computer visualization of the beating of a
Wilberforce pendulum Eur. J. Phys., 20, 89 (1999)
5
Ideato e realizzato in prototipo da Dusan Ponikvar, dell’Università di Ljubljana, che lo ha
sommariamente descritto in Rev. Sci. Instrum. 70, 2175 (1999)
1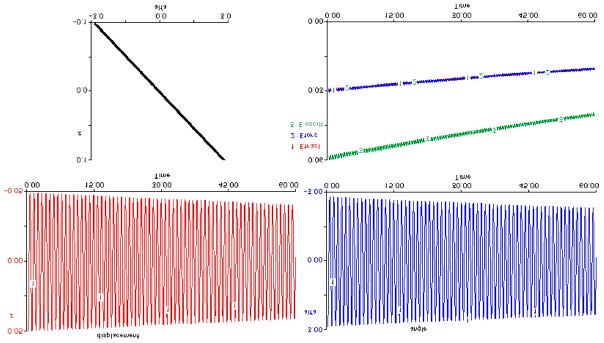
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Il pendolo è stato realizzato dalla ditta MAD6 con una molla elicoidale di 43 spire (diametro
2.5 cm) e con una massa cilindrica in ottone di circa 0.5 kg. La molla viene appesa ad un
supporto rigido, fissato al bordo di un tavolo, che ne blocca l’estremità superiore. La massa è
agganciata all’estremità inferiore della molla in modo rigido. Al fondo della massa è avvitato
un disco catarifrangente cui è sovrapposto un disco Polaroid.
Sia il sensore di distanza (sonar) che il sensore di rotazione vengono posti a terra, tra loro
affiancati in modo che sia il fascio di ultrasuoni che il fascio di luce infrarossa intercettino
bene il disco catarifrangente (la distanza utile è tra 0.5 m e 1.0 m)
Schema dell’apparato
6
Ditta partner del progetto IRDIS, con sede in Ponteranica, Bergamo
http://www.edumad.com
2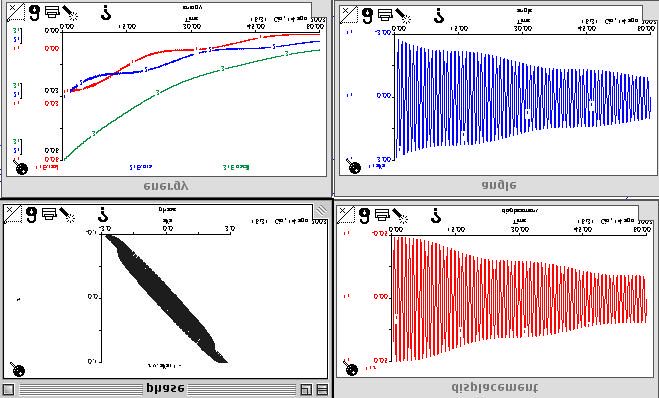
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Fotografia del sensore di rotazione e del pendolo
Un esempio di registrazione di angolo di rotazione e di spostamento verticale ottenuti
pilotando l’interfaccia CBL con una calcolatrice grafica TI89 è mostrato in figura:
angolo elongazione elongaz. vs. angolo
Graficando l’angolo di rotazione in funzione della elongazione si vede che lo sfasamento tra
le due grandezze varia notevolmente.
Un secondo esempio di registrazione ottenuto con Personal Computer, interfaccia LabPro
pilotata da software LoggerPro:
3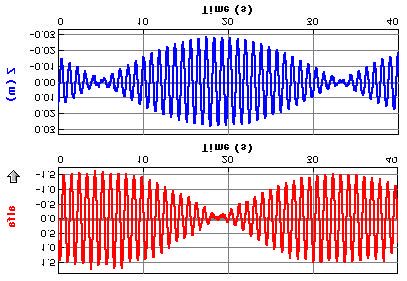
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Angolo ed elongazione in funzione del tempo
E’ evidente dai grafici che l’oscillazione verticale (grafico in rosso) pian piano si attenua,
mentre inizia a crescere quella rotazionale (grafico in blu); poi il processo si inverte e
l’ampiezza della rotazione cala mentre l’elongazione verticale cresce.
Si osserva cioè un battimento tra i due tipi di oscillazione, con energia totale associata al
moto che passa da un oscillatore all’altro.
Questo trasferimento di energia può avvenire in modo completo solo se il periodo di
oscillazione torsionale uguaglia il periodo della oscillazione longitudinale (qui circa 0.96
secondi), altrimenti le ampiezze di oscillazione e di traslazione variano nel tempo ma non si
annullano del tutto in modo periodico.
L’energia di ciascun tipo di oscillazione è la somma di un termine cinetico e di un termine
potenziale elastico L’energia associata alla traslazione è: Et=(m/2)v2 +(k/2)z2 (ove m è la
massa, v la velocità, k la costante elastica , e z lo spostamento verticale dalla posizione di
equilibrio).
Quella associata alla rotazione è: Er=(I/2)ω2+(δ/2)α 2 (ove I è il momento di inerzia della
massa, ω = ? α? ?? la pulsazione, δ la costante di torsione e α l’angolo di torsione).
L’energia totale vale quindi
E= Et+Er=(m/2)v2+(k/2)z2 +(I/2)ω 2+(δ/2)α 2
Per tracciare l’evoluzione temporale dei vari termini serve conoscere i valori delle 4 costanti
m,k,I,δ.
Per misurare la massa basta usare una bilancia. Per calcolare k si può misurare
l’allungamento della molla soggetta alla forza peso dovuta alla massa. Il momento di inerzia
4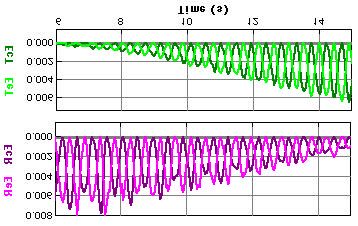
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
rispetto all’asse di un cili ndro pieno si calcola facilmente: I=mR2/2 . Il valore della costante di
torsione si può calcolare dalla relazione che fornisce la pulsazione ω=2π/T dell’oscillatore
torsionale : ω2 =δ/I, ovvero δ=I(2π/T)2
Una misura più accurata del momento di inerzia Ix per una massa che abbia una geometria
non esattamente cilindrica si può ottenere utilizzando una doppia misura del periodo: una con
la massa da sola, ed una aggiungendo un toro cilindrico di massa e dimensioni note (e quindi
con momento di inerzia In calcolabile esattamente).
I due periodi misurati obbedisconono alle relazioni (T1/2π)2 = Ix/δ , (T2 /2π)2 = (Ix +In )/δ
Quindi, dividendo membro a membro si ottiene: (T2 / T1 )2 =1+In/ Ix , e infine Ix = In T 12 /( T22 -
T1 2)
Energia cinetica (Ecr) ed elastica (Eer) rotazionale e cinetica (Ect) ed elastica (Eet)
traslazionale
L’energia associata a traslazione e quella associata alla rotazione variano nel tempo: si ha il
fenomeno del battimento, ad una frequenza molto inferiore a quella dell’oscillazione.
5
Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Energia rotazionele Er e traslazionale Et in funzione del tempo
La somma dell’energia associata a traslazione e quella associata alla rotazione decade
lentamente nel tempo con legge circa esponenziale.
Decadimento esponenziale dell’energia “totale” Er+Et
Anche se rotazione e traslazione sembrano avere esattamente la stessa frequenza è
possibile rivelare due componenti di Fourier distinte nel segnale (sia per l’angolo che per lo
spostamento): si tratta delle frequenze proprie di due distinti modi fondamentali, ciascuno
composto in parte di rotazione e in parte di traslazione. Questi due modi possono venire
eccitati singolarmente o mescolati, a seconda delle condizioni iniziali. Quello descritto nei
grafici fin qui riportati è un modo misto ottenuto con spostamento iniziale finito e angolo
iniziale nullo.
6Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Per comprendere meglio il fe nomeno è possibile realizzarne una simulazione, ad esempio
risolvendo il sistema di equazioni differenziali accoppiate per moto torsionale e traslazionale,
in cui si è introdotto un coefficiente di accoppiamento tra i due moti.
Per la sola traslazione la forza di richiamo è –kz, cui aggiungiamo una forza indotta dalla
torsione –εα : allora l’accelerazione traslazionale è d 2 z/dt2= –(kz+εα)/m
Per la sola rotazione la forza di richiamo è –D cui aggiungiamo una forza indotta dallo
spostamento –εz : allora l’accelerazione rotazionale è e d 2α/dt2 = –(Dα+εz)/I .
Il valore della costante di accoppiamento ε dipende dal tipo di molla, ed esso determina la
frequenza del battimento. Più forte è l’accoppiamento, più rapido è il trasferimento d’energia..
Simulazione ottenuta con calcolatrice grafica
Simulazioni più rapide ed efficienti si possono ottenere su Personal Computer con software
dedicati, ad esempio con Stella, che consente di introdurre in modo facile la presenza di uno
smorzamento (ad esempio di tipo viscoso).
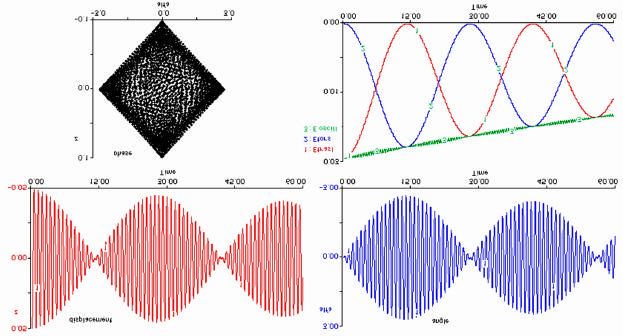
Nei grafici seguenti si mostrano due simulazioni ottenute con Stella per diverse condizioni
iniziali: nel primo caso l’energia viene totalmente trasferita da rotazione a traslazione e
viceversa ad ogni periodo del battimento, nel secondo caso una opportuna scelta del rapporto
tra angolo e spostamento iniziale elimina il battimento e l’energia viene ugualmente ripartita
7Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
fra traslazione e rotazione. In questo secondo caso la relazione di fase tra rotazione e
traslazione resta fissa: essa può essere 0 oppure π.
Simulazione con angolo iniziale nullo
Simulazione con angolo iniziale scelto in modo da eliminare il battimento
8Giacomo Torzo, Michele D’Anna
IL PENDOLO DI WILBERFORCE STUDIATO CON RTL
Nello studio del fenomeno simulato emerge chiaro che l’energia “totale” semplicemente
calcolata come somma di termini cinetici ed elastici mostra una modulazione residua alla
frequenza di oscillazione: questa è dovuta all’assenza, nel modello, del piccolo termine di
accoppiamento E acc=εαz
Se calcoliamo l’energia totale come E= Et+Er+E acc =(m/2)v2+(k/2)z2 +(I/2)ω 2+(δ/2)α 2+εαz tale
modulazione sparisce.
La simulazione consente di mostrare come anche che i due modi fondamentali si possono
disaccoppiare perfettamente (in presenza di smorzamento finito) solo per un preciso valore
del rapporto tra coefficienti di smorzamento traslazionale e rotazionale: per qualsiasi altro
valore di tale rapporto, anche se l’eccitazione avviene con condizioni iniziali che ripartiscono
equamente l’energia tra rotazione e traslazione, dopo un po’ inizia il fenomeno del battimento,
causato dalla dissipazione più rapida di un tipo di oscillazione rispetto all’altra.
9Puoi anche leggere