First Lego League: finale italiana di Rovereto
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

1
First Lego League: finale italiana di Rovereto
Siamo partiti giovedì 7 marzo in treno, un gruppo di 8 studenti e 2 insegnanti. La squadra che ha
preparato la gara era costituita da 5 studenti (Balma Giovanni, Ferrari Lorenzo, Panebianco
Gianluca, Pidalà Matteo della 1SC e Repetti Davide della 2AI). Con noi c’erano solo 3 tifosi, tutti
della 2AI (Milesi Simone, Nicolò Michele, Cremaschi Gianluca): anche loro avevano cominciato
partecipando alla realizzazione del progetto, poi per motivi diversi non erano più venuti. Le
insegnanti erano Maria Grazia Gallo, che ha preparato i ragazzi per la competizione (l’allenatore
della squadra) e la prof. Cinzia Bonini che gentilmente ha accettato di accompagnare i ragazzi, con
il rischio di annoiarsi molto visto che non si occupa di robotica !
Siamo arrivati a Rovereto a mezzogiorno, accolti da un tempo umido e piovigginoso. Nel
pomeriggio abbiamo fatto i turisti, visitando il bellissimo Museo Civico di Rovereto. Alla sera siamo
andati a vedere il Video-collegamento in diretta con Paolo Bellutta, fisico della Nasa che pilota i
robot su Marte.
La mattina dopo prima di recarci al Palazetto
dello Sport siamo andati a vedere Maria
Dolens, la campana della pace di Rovereto.
Nel pomeriggio abbiamo fatto la prima gara e
ci siamo subito classificati al secondo posto.
Le altre 2 gare erano il giorno successivo, ma
non siamo riusciti a migliorare il punteggio,
per cui abbiamo chiuso la parte relativa alla
competizione pratica al secondo posto. Il nostro robot si è comportato bene, i risultati ottenuti
sono quelli che ci aspettavamo durante le mille prove che abbiamo fatto in laboratorio. Il
problema della gara è che il tempo è molto limitato ( 2 minuto e mezzo) per cui occorre fare molta
attenzione a non perdere secondi preziosi fra una missione e la successiva. Avevamo deciso già a
2 scuola, durante gli allenamenti, quali missioni fare per cercare di ottenere in così poco tempo il massimo punteggio. Occorreva avere un po’ più di fortuna nella missione del bowling per migliorare, ma i birilli hanno stentato a cadere! Sabato 8 marzo è stata una giornata molto intensa perché oltre alle rimanenti due gare abbiamo esposto sia la relazione scientifica che quella tecnica. La relazione tecnica è stata la prima che abbiamo presentato. Oltre alla relazione scritta per esteso avevamo preparato anche una presentazione da seguire come traccia e un video (che si può visualizzare sul canale Youtube del Maserati) dove avevamo filmato tutte le missioni. Questo video doveva essere la dimostrazione pratica che le missioni erano state progettate ed eseguite tutte. I componenti della commissione ci hanno chiesto la strategia che avevamo scelto, poi ci hanno chiesto di spiegare il programma più complicato, che è quello relativo alle medicine (unico programma dove avevamo usato un sensore di luminosità). La missione che abbiamo fatto vedere praticamente è quella relativa all’anello posto su una torre alta che il robot deve prendere e riportare in base, conclusa brillantemente. I commissari hanno notato le ruote del nostro robot, diverse da quelle di tutti gli altri concorrenti. Abbiamo spiegato che per avere queste ruote abbiamo comprato una moto della Lego technic: questa scelta ci ha permesso di migliorare molto la stabilità del robot e la ripetitività dei percorsi. La relazione scientifica è stata presentata come ultima di tutti i gruppi. La commissione scientifica ha ascoltato con interesse l’idea che abbiamo sviluppato nel nostro progetto che è quella di progettare un kit da applicare a una carrozzina di un anziano. L’ipotesi è

3 quella di avere a che fare con un anziano che non cammina e ci vede poco, lo scopo è quello di renderlo indipendente almeno nei suoi movimenti all’interno della propria abitazione. Il dispositivo che abbiamo pensato tramite un microcontrollore e dei sensori che sentono gli ostacoli avverte l’anziano, con un messaggio audio, che c’è un ostacolo avanti o dietro a una distanza di 20 cm e contemporaneamente, se lui insiste a muoversi in quella direzione, blocca la sedia a rotelle, in modo da obbligarlo a cambiare direzione. Abbiamo fatto 3 simulazioni del funzionamento del dispositivo. La prima realizzata sia con una programmazione con il software NXT sia con una programmazione in linguaggio C. Consiste nel far simulare i movimenti dell’anziano, con un robot della Lego, tramite la generazione di numeri casuali che determinano il tipo di movimento, che viene poi controllato e bloccato con i sensori. La seconda simulazione invece è stata realizzata usando un brick Lego come trasmettitore che viene comandato da una persona che rappresenta l’anziano che guida la carrozzina. Tramite pulsanti comanda un robot (che rappresenta la carrozzina) su cui c’è un software ricevitore a fare i movimenti desiderati: quando c’è un ostacolo il robot si blocca e lo segnala. I messaggi sono stati registrati tramite un sintetizzatore vocale. I componenti della commissione ci hanno rivolto molte domande, quando abbiamo finito l’esposizione ci hanno congedato facendoci i complimenti per il lavoro svolto. Nel pomeriggio di sabato ci sono state le premiazioni. Ad ogni squadra sono state consegnate le griglie di valutazione delle varie parti della competizione per giustificare i risultati finali. Abbiamo ricevuto il primo premio come miglior “robot design”, che riguarda la parte relativa alla relazione tecnica. In pratica il nostro robot è stato dichiarato il migliore fra quelli presentati. Per

4
quanto riguarda la progettazione meccanica è stata
giudicata ottima sia come resistenza (integrità strutturale
e capacità di affrontare i rigori della competizione), sia
come resistenza meccanica (utilizzo economico di parti e
facilità di riparazione e modifica), sia come
meccanizzazione (abilità del meccanismo robotico di
muoversi o agire con appropriata velocità, forza e
accuratezza per obiettivi prefissati). Anche per quanto
riguarda la programmazione il giudizio è stato ottimo sia
per la qualità (appropriatezza dei programmi per gli scopi
preposti e potenzialità di raggiungimento di risultati
consistenti), sia per l’efficienza (modularità, funzionalità e
comprensione dei programmi), sia per
l’automazione/navigazione (abilità del robot a muoversi
come voluto: Il giudizio è stato ottimo anche per la
strategia e l’innovazione (processo di progettazione,
strategie di missione, innovazione).
Purtroppo il giudizio è stato meno positivo per il “progetto” (la relazione scientifica), malgrado i
complimenti fatti dalla commissione in fase di esposizione.
Nella parte riguardante il “core value” il giudizio è stato ottimo per il lavoro di squadra, ma a livelli
mediani per l’ispirazione e la professionalità cortese. Forse è mancato una buona e numerosa
tifoseria, che invece altre squadre avevano abbondantemente. Anche questo è stato valutato, e
per noi negativamente. Se parteciperemo ancora occorre andare più numerosi.
Le valutazioni delle singole parti e la classifica completa si possono trovare al link seguente, sul sito
del Museo Civico di Rovereto
http://www.museocivico.rovereto.tn.it/UploadDocs/4707_FLL_Naz_classifica.pdf
Come graduatoria finale ci siamo classificati al sesto posto.
Il risultato della partecipazione alla
gara è soddisfacente visto il
piazzamento al secondo posto. E’
molto significativo per noi
l’attribuzione del primo premio per il
“robot design”, riconosce la qualità
del lavoro tecnico realizzato. Anche il
piazzamento al sesto posto nella
classifica generale è positivo, tenendo
conto che riguarda le 24 squadre
migliori in tutta Italia.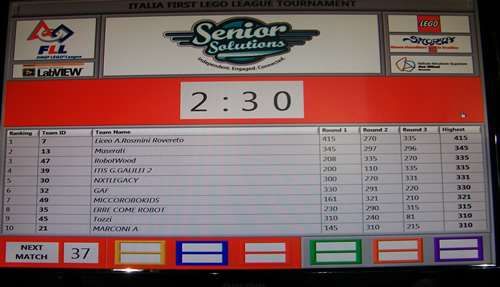
5 E’ rimasta un po’ di amarezza per il giudizio della commissione scientifica che non riusciamo a capire, visto l’interesse dimostrato durante l’esposizione e i complimenti fatti al termine. Un po’ di amarezza è rimasta anche per il fatto che le prime 2 squadre classificate sono entrambe di Rovereto (le squadre di casa): questo risultato un po’ fa pensare. Ci ripromettiamo di partecipare ancora il prossimo anno cercando di raggiungere risultati ancora migliori.





Puoi anche leggere