Comportamento a regime dei sistemi di controllo in retroazione - Appunti di Controlli Automatici
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Comportamento a regime dei sistemi di controllo in retroazione Appunti di Controlli Automatici Versione 1.0 Ing. Alessandro Pisano
SOMMARIO
Introduzione 3
1. Stabilità a ciclo chiuso e teorema del valore finale 3
2. Analisi ed esempi 5
2.1 Sistemi di controllo di tipo zero 5
2.1.1 Risposta al set-point costante (con disturbo nullo) 6
2.1.2 Risposta al disturbo costante (con set-point nullo) 9
2.1.3 Risposta al set-point e al disturbo costanti agenti simultaneamente 10
2.1.4 Considerazioni aggiuntive 11
2.2 Sistemi di controllo di tipo uno 12
2.2.1 Sistemi di controllo di tipo uno con polo nel regolatore 12
2.2.2 Sistemi di controllo di tipo uno con polo nel processo 15
2.2.3 Sistemi di controllo di tipo uno con set-point a rampa 16
2.3 Sistemi di controllo di tipo due 20
2.3.1 Sistemi di controllo di tipo due con set-point e disturbi a rampa 20
2.4 Tabelle riassuntive 23
2
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itComportamento a regime dei sistemi di controllo in retroazione
Introduzione
Il comportamento a regime dei sistemi di controllo si riferisce alla analisi degli effetti a regime di
ingressi e disturbi polinomiali (segnali costanti, a rampa, a parabola, etc., detti anche “canonici”)
oppure ingressi e disturbi avente andamento sinusoidale.
Faremo riferimento a sistemi di controllo a retroazione unitaria (Figura 1)
d(t)
ydes(t) e(t) u(t) y(t)
y(t)
des
Figura 1– Sistema di controllo a retroazione unitaria con set-point y (t) e disturbo sull’ingresso d(t)
Nello schema in Figura 1 y(t) ed u(t) rappresentano l’uscita e l’ingresso del processo P(s) , ydes(t)
rappresenta il set-point, d(t) rappresenta un disturbo agente sull’ingresso, ed R(s) è i regolatore.
Per quanto concerne il comportamento a regime per ingressi e disturbi canonici risulta di estremo
rilievo la presenza di poli nell’origine nel controllore e/o nel processo. E’ importante sia il numero
complessivo di poli nell’origine che la loro “ripartizione” tra controllore e processo. Il concetto
importante e rilevante in tale contesto è quello di “Tipo del sistema di controllo”, che
approfondiremo in seguito.
Per quanto concerne invece il comportamento a regime a fronte di segnali sinusoidali si fa
riferimento ad un criterio di analisi nel dominio della frequenza basato sul concetto di risposta
armonica.
Verrà anche illustrato, seppur qualitativamente, un criterio di natura più generale denominato
“principio del modello interno” che ci consentirà una descrizione unificata, e un punto di vista
differente, su alcuni aspetti relativi all’inseguimento del set-point ed alla reiezione dei disturbi.
1. Stabilità a ciclo chiuso e teorema del valore finale
Tutte le considerazioni sviluppate nel presente documento hanno come prerequisito essenziale
che il sistema in Figura 1 sia asintoticamente stabile a ciclo chiuso
In altri termini, richiediamo che la FdT a ciclo chiuso tra il set-point e l’uscita:
(1)
3
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itabbia tutti i poli a parte reale strettamente negativa. Se vale ciò risulta essere asintoticamente
stabile anche la FdT disturbo-uscita
(2)
Si può difatti osservare come entrambe le FdT (1) e (2) abbiamo a denominatore lo stesso termine,
la funzione d’anello .
Il polinomio caratteristico del sistema a ciclo chiuso sarà
(3)
Essendo e i denominatori delle Fdt del regolatore e del processo, e ,
i relativi numeratori.
Richiamiamo un risultato di fondamentale importanza ed utilità nello studio del comportamento a
regime dei sistemi di controllo
Teorema del valore finale.
Sia G(s) la TdL di un segnale g(t) avente un limite finito per t tendente all’infinito.
Allora vale la seguente relazione
(4)
Per comprendere se il teorema del valore finale è applicabile si può sfruttare il seguente Corollario
Corollario 1
Un segnale g(t) ammette un limite finito g* per t tendente all’infinito se e solo se la FdT sG(s) non
possiede poli a parte reale positiva oppure nulla (o, in altri termini, se e solo se la FdT sG(s) è
asintoticamente stabile)
Esempio 1. Il segnale ammette limite finito (pari a zero) per t che tende ad infinito. La
sua TdL G(s) è pari a: . La FdT ha un unico polo a parte reale negativa, in
accordo quindi con il Corollario 1. Applicando il teorema del valore finale si ottiene il valore del
limite:
(5)
Esempio 2. Il segnale (gradino unitario) ammette limite finito (pari ad 1) per t che
tende ad infinito. La sua TdL G(s) è pari a: . La FdT non ammette poli a parte
reale positiva oppure nulla, come richiesto dal Corollario 1. Applicando il teorema del valore finale
si ottiene il valore del limite
(6)
Esempio 3. Il segnale (rampa unitaria) non ammette limite finito per t che tende
ad infinito. Ci attendiamo quindi che la condizione del Corollario 1 non sia soddisfatta. La TdL G(s)
4
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itdel segnale è pari a: . La FdT ammette un polo a parte reale nulla, violando
quindi la condizione del Corollario 1.
Esempio 4. Il segnale non ammette limite finito per t che tende ad infinito. Il
segnale si mantiene sempre limitato, ma il limite per t che tende ad infinito non esiste. Ci
attendiamo quindi che come nell’esempio precedente la condizione del Corollario 1 non sia
soddisfatta. La TdL G(s) del segnale è pari a: . La FdT ammette due poli
a parte reale nulla, violando quindi la condizione del Corollario 1. Si presti attenzione al fatto che
l’applicazione del teorema finale fornisce una risposta errata:
(7)
E’ quindi fondamentale, ogni qualvolta si desideri applicate il Teorema del valore finale, accertarsi
con cura che siano soddisfatte le condizioni di applicabilità.
2. Analisi ed esempi
Consideriamo il sistema di controllo a retroazione unitaria in figura 1, e ipotizziamo che il sistema a
ciclo chiuso sia asintoticamente stabile.
Definiamo preliminarmente il concetto di tipo di sistema di controllo
Definizione 1 Tipo di un sistema di controllo
Con riferimento al sistema di controllo in Figura 1, si definisce tipo del sistema il numero
complessivo di poli nell’origine presenti nel controllore e nel processo.
Un sistema di controllo potrà pertanto essere di tipo zero, di tipo uno, di tipo due, etc. Nella
pratica raramente si eccede il tipo due (a causa dei problemi di stabilità a ciclo chiuso conseguenti
alla presenza di un elevato numero di poli nell’origine in catena diretta), e i sistemi di tipo uno
sono quelli largamente più diffusi
Iniziamo l’analisi dai sistemi di tipo zero per rivolgere successivamente l’attenzione ai sistemi di
tipo superiore.
2.1 Sistemi di controllo di tipo zero
Se il sistema è di tipo zero è sempre possibile esprimere le FdT di processo e controllore nella
forma seguente
(8)
(9)
Tale decomposizione mette in evidenza i guadagni in bassa frequenza (anche denominati guadagni
in continua, o semplicemente guadagni) e del regolatore e del processo, rispettivamente.
5
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.it2.1.1 Risposta al set-point costante (con disturbo nullo)
Analizziamo la risposta a regime per un set-point costante (il disturbo d(t) è temporaneamente
posto pari a zero).
(10)
Per determinare il valore di regime della uscita y(t) del sistema a ciclo chiuso applicando il teorema
del valore finale si deve determinare la sua TdL Y(s). Dalla equazione (1) ricaviamo che
(11)
Applicando il Teorema del valore finale (4) si può determinare a partire dalla (6) il valore di regime
della uscita y(t)
(12)
Ragioniamo sulla relazione (12). Osserviamo preliminarmente come il valore a regime non dipenda
separatamente dai guadagni e , ma soltanto dal loro prodotto. Ciò è conseguenza del
fatto che la FdT a ciclo chiuso W(s) non dipende separatamente dalle FdT R(s) e P(s) di regolatore e
processo, ma solo dal loro prodotto R(s)P(s).
Il coefficiente rappresenta il guadagno in bassa frequenza della FdT a ciclo chiuso W(s). Il
progettista non può in genere modificare il guadagno del processo ma ha a disposizione come
parametro modificabile di progetto il guadagno del regolatore.
Da un sistema di controllo si desidera che l’uscita riproduca il più fedelmente possibile il set-point.
Per quanto concerne il comportamento a regime si vorrebbe ottenere la relazione di uguaglianza
(13)
Appare chiaro dalla (12) come la relazione (13) sia impossibile da ottenere. Non esiste difatti
nessuna coppia di valori finiti per i due guadagni che renda unitario il rapporto . Tale
quantità è sempre strettamente inferiore ad uno.
Per rendere il rapporto sufficientemente vicino all’unità si può aumentare il guadagno
del regolatore. Difatti se si ha e in definitiva quando è
molro grande si ha
(14)
Tale procedura, che comunque conduce sempre ad un valore inferiore ad uno per il rapporto
, deve tener conto del fatto che il sistema a ciclo chiuso può risultare destabilizzato da un
valore troppo elevato del guadagno in catena diretta. Una analisi preliminare basata sul luogo
delle radici risulta utile a comprendere in quale misura è possibile incrementare il guadagno in
6
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itcatena diretta senza incorrere in fenomeni di instabilità del sistema a ciclo chiuso, eventualità che
ovviamente invalida tutte le considerazioni sviluppate in precedenza.
Esempio 5 Si consideri il sistema in Figura 1 con processo del secondo ordine asintoticamente
stabile e regolatore proporzionale R(s)=Kr=2. Si valuti il valore dell’uscita a
regime per un set-point costante ydes(t)=2 con disturbo d(t)=0.
Svolgimento dell’esempio 5
Si può riscrivere la FdT del processo in accordo con la decomposizone (9)
(15)
Applicando la formula (12) si ottiene, per il valore considerato di Kr
(16)
Se si utilizza un valore superiore per il guadagno del regolatore, ad es. Kr=20,
(17)
Con un valore ancora superiore, ad es. Kr=100, si ha
(18)
Si noti come il valore di regime si avvicina sempre più al set-point.
E’ d’obbligo verificare che in corrispondenza dei valori suggeriti per Kr il sistema a ciclo chiuso si
mantiene asintoticamente stabile. Se cosi non fosse, difatti, la formula (7) perderebbe di validità.
Una analisi grafica mediante il Luogo delle radici rivela come il sistema in esame e’ stabile a ciclo
chiuso per ogni valore di Kr. Dalla Figura 2 si osserva infatti come i due rami del luogo siano
interamente contenuti nel semipiano sinistro. Il medesimo diagramma offre inoltre una
valutazione delle caratteristiche dinamiche a ciclo chiuso al variare di K r. Si nota infatti come per
valori elevati del guadagno del regolatore si abbiano a ciclo chiuso due poli complessi coniugati la
cui parte immaginaria è via via più grande al crescere di Kr. Ciò giustifica il diverso andamento
transitorio dei tre grafici in Figura 3.
7
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itIm
Re
Figura 2 - Luogo delle radici del processo P(s) dell’Esempio 5
Step Response
3
kr=2
kr=20
2.5
kr=100
2
Amplitude
1.5
1
0.5
0
0 0.5 1 1.5 2 2.5 3
Time (sec)
Figura 3 - Evoluzione dell’uscita nell’Esempio 5 per tre diversi valori del guadagno del regolatore proporzionale
Ritornando a considerare un generico sistema di controllo di tipo zero, ricaviamo con il medesimo
approccio il valore a regime della variabile “errore” e(t)=ydes(t)-y(t)
La FdT tra il set-point e la variabile di errore è
(19)
Quindi
(20)
Applicando il teorema del valore finale:
(21)
8
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itPoiché e(t)=ydes(t)-y(t), il risultato finale della equazione (21) si può anche ricavare più
semplicemente a partire dalla (12), in accordo con i seguenti passaggi
(22)
2.1.2 Risposta a disturbi costanti (con set-point nullo)
Ora analizziamo l’uscita a regime del sistema in figura 1 sotto l’ipotesi di disturbo costante ,
considerando temporaneamente il set-point nullo. Si ha per ipotesi
(23)
La FdT tra il disturbo e la variabile di uscita (quando il set-point è pari a zero) è
(24)
Quindi
(25)
Applicando il teorema del valore finale si ottiene
(26)
Sulla eq. (26) vanno fatte considerazioni differenti rispetto alla (12). Il valore a regime dell’uscita in
risposta ad un disturbo costante (e con set-point nullo) dipende separatamente dai guadagni e
, e non più soltanto dal loro prodotto.
Come detto, da un sistema di controllo si desidera che l’uscita riproduca il più fedelmente
possibile il set-point operando la compensazione degli effetti del disturbo; quindi per quanto
concerne il comportamento a regime a fronte di un disturbo si vorrebbe che
(27)
Appare chiaro dalla (20) come la relazione (21) sia impossibile da ottenere, se non per valori
infinitamente elevati del guadagno del regolatore. Anche nel contesto della reiezione dei disturbi,
l’incremento del guadagno del controllore si rileva lo strumento progettuale utile a garantire
determinate specifiche (ad esempio, sulla attenuazione minima richiesta per il disturbo sull’uscita)
Come prima, si deve compiere una analisi preliminare basata sul luogo delle radici per
comprendere se un guadagno in catena diretta troppo elevato può mandare in instabilità il
sistema a ciclo chiuso, e per determinare eventualmente il valore del guadagno critico oltre il
quale il sistema a ciclo chiuso viene destabilizzato.
9
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itEsempio 5-continua
Con riferimento al sistema di controllo dell’esempio 5, si valuti la risposta a regime per un disturbo
costante d(t)=D=5, con set-point nullo, in corrispondenza dei tre valori del guadagno del
regolatore (Kr=2, Kr=20, Kr=100).
Applicando la relazione (20) si ha, per i tre casi:
Kr=2 (28)
Kr=20 (29)
Kr=100 (30)
I grafici in Figura 4 confermano le (28)-(30).
Step Response
1.4
kr =2
kr =20
1.2
kr =100
1
0.8
Amplitude
0.6
0.4
0.2
0
0 0.5 1 1.5 2 2.5 3
Time (sec)
Figura 4 - Evoluzione dell’uscita nell’esempio 5-cont per tre diversi valori del guadagno del regolatore
2.1.3 Risposta al set-point e al disturbo costanti agenti simultaneamente
Applicando il principio di sovrapposizione degli effetti si ricava immediatamente il valore di regime
dell’uscita quando nel sistema di controllo in Figura 1 agiscono, simultaneamente, un set-point
costante ydes(t)=Yd ed un disturbo costante d(t)=D.
Si ha infatti
10
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.it(31)
da cui si ricava, con procedura analoga a prima, il seguente valore di regime per l’uscita nelle
condizioni in esame
(32)
all’aumentare di si realizza, con precisione progressivamente crescente, la relazione
(33)
2.1.4 Considerazioni aggiuntive
Sono stati sinora considerati set-point e disturbi costanti. Va rimarcato come le considerazioni
sviluppate valgano anche in casi più generali in cui set-point e disturbi siano tempo varianti ma
tendano ad un valore costante per t tendente all’infinito. Ciò può essere formalizzato come segue.
Siano h1(t) ed h2(t) due funzioni qualunque tali che il limite per t tendente all’infinito sia pari ad 1
per entrambe. Siano inoltre g1(t) e g2(t) due funzioni qualunque tali che il limite per t tendente
all’infinito sia pari a 0 per entrambe:
(34)
Si consideri il sistema di controllo in Figura 1 sotto l’azione simultanea dei seguenti segnali di set-
point e disturbo
(35)
(36)
E’ chiaro che, sulla base delle relazioni (34), i segnali in (35)- (36) sono tali che
(37)
Si mostra facilmente a partire dalla (37) che il valore di regime dell’uscita del sotto l’azione
simultanea dei segnali di set-point e disturbo (35) e (36) è ancora espresso dalla relazione (32).
L’evoluzione transitoria dell’uscita può risultare, naturalmente, completamente differente rispetto
alla applicazione di set-point e disturbi costanti, ma il valore di regime è comunque lo stesso.
Per sistemi di controllo di tipo zero abbiamo visto quindi come le uniche grandezze che
intervengono nella determinazione dei valori di regime siano il guadagno del processo ed il
guadagno del regolatore. Ai fini della determinazione dei valori di regime delle grandezze di
interesse (l’uscita y(t), o equivalentemente l’errore e(t)) si può fare pertanto riferimento ad uno
schema semplificato, riportato in Figura 5, in cui le parti “dinamiche” R’(s) ed P’(s) di controllore e
processo vengono rimosse. Si presti attenzione al fatto che lo schema equivalente in Figura 5 vale
solo se il sistema di controllo è di tipo zero, e, inoltre, si rimarca come l’equivalenza tra gli schemi
in figura 1 e 5 sussista soltanto con riferimento al comportamento a regime. Si rimarca anche
11
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itcome l’analogia vale soltanto se il sistema “completo” in Figura 1 è asintoticamente stabile a ciclo
chiuso.
d(t)
ydes(t) e(t) y(t)
u(t)
Kr Kp
y(t)
Figura 5 - Schema equivalente per l’analisi del comportamento a regime di sistemi di controllo di tipo zero
La risposta di sistemi di controllo di tipo zero a set-point o disturbi a rampa è divergente a regime
e in qualche modo instabile, e come tale non viene indagata.
2.2 Sistemi di controllo di tipo uno
Lo schema in retroazione in Figura 1 viene detto di tipo 1 se nel regolatore, oppure nel processo, è
presente un polo nell’origine. I due casi sono equivalenti per quanto concerne la risposta al set
point, ma conducono a comportamenti differenti per quanto concerne la risposta al disturbo,
pertanto verranno trattati separatamente.
2.2.1 Sistemi di controllo di tipo uno con polo nel regolatore
Se il sistema è di tipo uno, e se il polo nell’origine è presente nel regolatore, è sempre possibile
esprimere le FdT di processo e controllore nella forma seguente
(38)
(39)
Per un set-point costante ydes(t)=Yd , e considerando il disturbo d(t) temporaneamente pari a
zero, si ha
(40)
Si deve assumere, al solito, che la funzione di trasferimento a ciclo chiuso sia asintoticamente
stabile. Applicando il Teorema del valore finale si può determinare a partire dalla (40) il valore di
regime della uscita y(t)
(41)
E’ stato ricavato nella (41) un risultato completamente differente rispetto ai sistemi di tipo zero e
in particolare alla relazione (12). La relazione (41) mostrato come il valore di regime dell’uscita
12
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itcoincida esattamente con il set-point indipendentemente dai valori del guadagno del regolatore
e del processo.
Per quanto riguarda la variabile errore e(t)=ydes(t)-y(t) si ha, ovviamente:
(42)
(43
Per un disturbo costante d(t)=D , con set-point ydes(t) assunto nullo, si ha
(44)
Applicando il Teorema del valore finale alla (44) si ottiene
(45)
La (45) ci mostra che un sistema di controllo di tipo 1 con il polo nel regolatore è in grado di
operare la reiezione completa a regime di un disturbo costante. Il valore di regime dell’uscita
dovuta alla sola presenza del disturbo è pari a zero indipendentemente dall’ampiezza D del
disturbo e dai guadagni di regolatore e processo.
Applicando il principio di sovrapposizione degli effetti si ricava il valore di regime dell’uscita sotto
l’azione simultanea del set-point ydes(t)=Yd e del disturbo d(t)=D. Si ottiene:
(46)
Tale relazione stabilisce una importante proprietà di precisione statica robusta. La relazione (46)
si conserva difatti indipendentemente dai guadagni, e dalla struttura dinamica, del regolatore e
del processo. Essa è unicamente garantita dalla presenza del polo nell’origine nel regolatore (e
dalla stabilità a ciclo chiuso). E’ uno dei motivi della ampia diffusione dei regolatori PI.
Vale naturalmente ancora quanto detto nella sez 2.1.4 circa l’applicazione dei set-point e disturbi
tempo varianti (35) e (36) che tendano asintoticamente ai valori costanti e . La relazione (46)
continua ad essere valida anche in questo caso.
L’intera trattazione perde di validità se il sistema a ciclo chiuso non è asintoticamente stabile.
Esempio 6
Si consideri il sistema in Figura 1 con processo del secondo ordine asintoticamente stabile
ed un regolatore integrale . Si valuti il valore dell’uscita a regime in
presenza di un set-point costante ydes(t)=2 e di un disturbo tempovariante d(t)=10(1-e-t)
considerando i seguenti valori per il guadagno del regolatore integrale: Kr=1, Kr=5, Kr=20,
13
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itRiscriviamo le FdT del processo e del regolatore in accordo con la decomposizone (38)-(39)
(47)
(48)
La particolare espressione tempovariante del disturbo rende possibile l’applicazione dei risultati
conseguiti in precedenza (eq. (46)) in quanto d(t) tende asintoticamente al valore D=10.
La relazione (39) si particolarizza a . Tale relazione è valida se Kr=1 e se Kr=5, ma non più
quando Kr=20, valore del guadagno in corrispondenza del quale il sistema a ciclo chiuso è instabile.
La Figura 5a mostra lo schema simulink (file esempio6.mdl, v. pagina web del corso). I grafici
ottenuti per i tre valori del guadagni sono mostrati nella Figura 5b.
10*(1-exp(-u))
Clock Fcn
2 1 2
20 Scope
s
Constant conv([1 1],[1 4])(s)
Integrator Gain
Transfer Fcn
Figura 5a - Modello Simulink del sistema dell’esempio 6 con Kr=20.
6
Kr=1
Kr=5
5
Kr=20
4
3
2
1
0
0 5 10 15 20 25 30 35 40
Figura 5b - Uscita del sistema dell’esempio 6 con Kr=1, Kr=5, Kr=20.
14
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
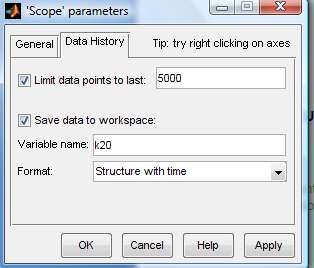
Ing. Alessandro Pisano – pisano@diee.unica.itIl blocco Scope deve essere configurato (menu Parameters-Data History) come nella parte sinistra
della Figura 5c. La simulazione deve essere lanciata tre volte di fila, inserendo il valore corrente di
Kr=1, 5, o 20 nello schema, e scrivendo k1, k5 o k20 nella casella in Figura.
Nella parte destra , il codice matlab per generare la figura 5b dopo che sono state effettuate le
prove in sequenza
t1=k1.time;
y1=k1.signals.values;
t5=k5.time;
y5=k5.signals.values;
t20=k20.time;
y20=k20.signals.values;
plot(t1,y1,t5,y5,t20,y20),
axis([0 40 0 6])
legend('K_r=1','K_r=5','K_r=20')
Figura 5c - Scope Parameters e m-file per la realizzazione del grafico in Figura 5b
2.2.2 Sistemi di controllo di tipo uno con polo nel processo
Se il sistema è di tipo uno, e se il polo nell’origine è presente nel processo, è sempre possibile
esprimere le FdT di processo e controllore nella forma seguente
(49)
(50)
Quando il disturbo è pari a zero, la risposta al set-point del sistema a ciclo chiuso in Figura 1 non
dipende separatamente dalle FdT di regolatore e processo, ma solo dal loro prodotto, che per le
due diverse tipologie di sistemi di controllo di tipo uno è equivalente. Infatti, sia considerando la
decomposizione (38)-(39) che considerando la decomposizone alternativa (49)-(50) il prodotto
delle due FdT è costante, e vale
(51)
Si ha quindi che la relazione (46) vale anche per i sistemi di tipo uno con polo nel processo.
Con riferimento invece alla risposta al disturbo, le cose cambiano rispetto al caso precedente.
Considerando un set-point nullo ed un disturbo costante si ha
(52)
15
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itApplicando il Teorema del valore finale si può determinare a partire dalla (40) il valore di regime
della uscita y(t)
(53)
Si può notare come in questa tipologia di sistemi di controllo di tipo uno l’effetto del disturbo a
regime è diverso da zero. Cosi come nei sistemi di tipo zero, tale effetto possa essere ridotto
incrementando il guadagno del regolatore (senza eccedere nei valori che destabilizzano il sistema
a ciclo chiuso). Tutti i sistemi fisici, per effetto delle inevitabili dinamiche non modellate, vengono
destabilizzate da valori di guadagno troppo elevati.
Una differenza tra i sistemi di tipo uno considerato ed i sistemi di tipo zero è che nei primi l’errore
a regime dovuto al disturbo (relazione (53)) dipende solo dal guadagno del regolatore, e non da
quello del processo come invece avveniva nella precedente relazione (26).
2.2.3 Sistemi di controllo di tipo uno con set-point a rampa
Consideriamo il comportamento di un sistema di controllo di tipo uno avente la struttura in Figura
1, e soggetto ad un set-point a rampa
(54)
e ad un disturbo posto pari a zero. Il sistema a ciclo chiuso con disturbo nullo può essere
rappresentato dallo schema compatto in Figura 6
ydes(t) e(t) y(t)
y(t)
Figura 6 - Sistema di controllo di tipo 1 in assenza di disturbo
L’uscita del sistema a ciclo chiuso tenderà a divergere per t che tende ad infinito, poichè anche il
set-point (54) tende a divergere asintotcamente.
Si può facilmente verificare come per la TdL Y(s) risultante siano violate le condizioni di
applicabilità del teorema del valore finale (v corollario 1). Considerando il set-point (54) e la sua
TdL
(55)
Si ha infatti che nel caso in esame
(56)
Pertanto
(57)
16
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.ite poiché la FdT (57) possiede un polo a parte reale nulla risulta appunto la violata la
condizione espressa nel corollario 1.
Si deve quindi necessariamente analizzando la variabile di errore e(t)=ydes(t)-y(t) , confidando che
ammetta un limite finito e che il teorema del valore finale sia effettivamente applicabile. La FdT tra
il set-point e l’errore è
(58)
Si ha pertanto
= (59)
= (60)
che è per ipotesi una FdT asintoticamente stabile. Quindi la variabile di errore e(t)=ydes(t)-
y(t) ammette un limite finito, ed il suo valore è il seguente
(61)
Un tipico andamento per il set-point a rampa e per la relativa variabile di uscita in un sistema di
controllo di tipo 1 è mostrato nella seguente Figura 7.1. La Figura 7.2 mostra l’evoluzione della
variabile di errore
Figura 7.1 -Set point a rampa e relativa variabile Figura 7.2 - Variabile di errore in un sistema di
di uscita in un sistema di contollo di tipo 1 contollo di tipo 1 con set point a rampa
Esempio 7
Si consideri il sistema di controllo in retroazione in Figura 8, con un processo del primo ordine
asintoticamente stabile e un regolatore da progettare.
d(t)
ydes(t) e(t) u(t) y(t)
y(t)
Figura 8– Sistema di controllo dell’esempio 7
17
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itLe specifiche sono le seguenti
- S1. Un set-point costante deve essere copiato a regime con un errore massimo dell’1%
- S2. Un disturbo costante deve essere attenuato a regime in misura pari almeno al 99%
Le specifiche sono compatibili con le prestazioni di un sistema di controllo di tipo zero. Quindi un
semplice regolatore poroporzionale è in grado di soddisfare entrambe le specifiche.
Una rapida analisi mediante LdR (v. Figura 9) indica come il sistema a ciclo chiuso resta stabile per
quanlunqe valore, anche arbitrariamente grande, del guadagno .
Im
Re
Figura 9– LdR del sistema in Figura 7 con un regolatore proporzionale
Il polinomio caratteristico del sistema a ciclo chiuso con il regolatore proporzionale e’
(62)
E pertanto il polo a ciclo chiuso assume il seguente valore in dipendenza dal guadagno
(63)
L’espressione (63) è in perfetto accordo con il LdR in Figura 9. Il sistema a ciclo chiuso è di fatto
rappresentato dalle FdT set-point uscita
(64)
e disturbo-uscita
(65)
Si noti che entrambe le FdT (64) e (65) sono casi particolari della di una FdT elementare del tipo
(66)
con i guadagni
(67)
e la medesima costante di tempo
(68)
Siamo in grado di “prevedere” accuratamente le traiettorie della uscita e della variabile di errore
mettendo a frutto quanto visto a proposito della risposta al gradino dei sistemi elementari.
La rapidità con la quale l’uscita converge verso il valore di regime è pertanto analoga, sia a fronte
del set-point che a fronte del disturbo. Schemi di controllo più sofisticati, non trattati nel presente
corso, permettono di “correggere” selettivamente la velocità di estinzione dei transitori di risposta
al set-point e di risposta al disturbo.
18
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itAl crescere di , come precedentemente dimostrato, si riduce, anche in presenza di un disturbo,
la differenza tra l’uscita a regime e il valore del set-point
La specifica S1 è soddisfatta se si garantisce che
(69)
Tale condizione è soddisfatta se
(70)
che conduce alla seguente diseguaglianza su
(71)
La specifica S2 è soddisfatta se si garantisce che
(72)
che conduce alla seguente diseguaglianza su
(73)
La diseguaglianza piu stringente è la (73), pertanto il problema di controllo oggetto del presente
esempio 7 è soddisfatto da un regolatore proporzionale con guadagno .
E’ consigliabile scegliere un valore incrementato di una certa percentuale per compensare possibili
variazioni parametriche sfavorevoli.
Nota. Se il set-point, o il disturbo, variano in maniera sufficientemente lenta rispetto alle
costanti di tempo piu lente delle FdT a ciclo chiuso, le proprietà di precisione statica e reiezione
del disturbo continuano a essere qualitativamente soddisfatte. Per chiarire meglio questo aspetto,
una lenta deriva del set-point in un sistema di controllo di tipo uno da luogo ad una
corrispondente analoga deriva per l’uscita, con un mantenimento, a regime, della seguente
relazione
(74)
anche a fronte di ampie, purché lente, escursioni del set-point, con un andamento qualitativo
simile a quello riportato in Figura 10.
t
Figura 10– Traiettoria qualitativa di un sistema di controllo di tipo uno con set-point lentamente variabile.
19
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.it2.3 Sistemi di controllo di tipo due
Nell’ambito delle diverse possibili casistiche di sistemi di controllo di tipo due, analizziamo quella
con maggior rilevanza pratica, che è quella in cui è presente un polo nell’origine nel regolatore, ed
un polo nell’origine nel processo, secondo lo schema a blocchi in Figura 11
d(t)
ydes(t) e(t) u(t) y(t)
y(t)
Figura 11– Un sistema di controllo di tipo due
Applicando il principio di sovrapposizione degli effetti e generalizzando al caso in esame le
relazioni precedentemente sviluppate si mostra facilmente come il valore di regime dell’uscita sotto
l’azione simultanea di un set-point costante ydes(t)=Yd e di un disturbo costante d(t)=D risulta
essere pari al valore del set-point statica robusta
(75)
Si ha in sintesi la proprietà di precisione statica robusta (cosi come si aveva anche nei sistemi di
controllo di tipo uno con il polo nel regolatore, cfr. sezione 2.2.1). La relazione (75) si conserva
difatti indipendentemente dai guadagni, e dalla struttura dinamica, del regolatore e del processo.
Essa è unicamente garantita dalla presenza del polo nell’origine nel regolatore (e dalla stabilità a
ciclo chiuso).
2.3.1 Sistemi di controllo di tipo due con set-point e disturbi a rampa
I sistemi di tipo due danno luogo ad un comportamento differente , rispetto a quelli di tipo uno, se
si considera un set-point a rampa
(76)
e ad un disturbo posto preliminarmente pari a zero. Il sistema a ciclo chiuso con disturbo nullo può
essere rappresentato dallo schema compatto in Figura 12
ydes(t) e(t) y(t)
y(t)
Figura 12 - Sistema di controllo di tipo 2 in assenza di disturbo
20
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itL’uscita del sistema a ciclo chiuso tenderà a divergere per t che tende ad infinito, poichè anche il
set-point (76) tende a divergere asintotcamente.
Analizziamo, come fatto in precedenza, il comportamento a regime della variabile di errore
e(t)=ydes(t)-y(t). La FdT tra il set-point e l’errore è
(77)
Si ha pertanto
= (78)
= (79)
che ha per ipotesi tutti i poli a parte reale strettamente negativa. Quindi la variabile di
errore e(t)=ydes(t)-y(t) ammette un limite finito, ed il suo valore è il seguente
(80)
L’uscita pertanto si sincronizza esattamente (copia) a regime il set-point a rampa in accordo con le
evoluzioni qualitative dell’uscita e dell’errore riportate nelle seguenti Figure 13.1 e 13.2
Set point a rampa e relativa
Figura 13.1 - Figura 7.2 - Variabile di errore in un sistema di
variabile di uscita in un sistema di contollo di contollo di tipo 2 con set point a rampa
tipo 2
Per quanto concerne il comportamento dell’uscita in presenza di un disturbo a rampa
(81)
(e un set-point assunto pari a zero) si mostra facilmente che
(82)
21
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itApplicando il Teorema del valore finale si può determinare a partire dalla (82) il valore di regime
della uscita y(t)
(83)
L’evoluzione temporale dell’uscita in risposta al disturbo a rampa sara pertanto qualitativamente
analoga a quella mostrata in Figura 14
t
Figura 14 - Uscita di un sistema di tipo due con disturbo a rampa e set point nullo
Il valore di regime dell’uscita del sistema di tipo due in esame in presenza di un set-point costante
(84)
e di un disturbo a rampa
(85)
sarà valutabile con semplicità applicando il principio di sovrapposizione degli effetti alla luce delle
relazioni (75) e (83)
(86)
22
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.it2.4 Tabelle riassuntive
Nelle seguenti tabelle si riassumono i risultati delle analisi fin qui svolte con riferimento alla
risposta al set-point ed al disturbo di sistemi di tipo 0, 1 e 2 (per set-point e disturbi costanti, a
rampa, o parabolici), e si fornisce, nelle ultime righe e/o colonne delle Tabelle, anche qualche
nuova relazione non precedentemente ricavata.
Il segnale Errore è la differenza e(t)=ydes(t)-y(t) tra il set-point e l’uscita, cioè il segnale applicato in
ingresso al regolatore R(s).
Tabella riassuntiva – Risposta al set-point (con disturbo nullo)
Set-point Tipo 0 Tipo 1 Tipo 2
Costante Errore costante Errore 0 Errore 0
Rampa Errore infinito Errore costante Errore 0
Parabola Errore infinito Errore infinito Errore costante
Tabella riassuntiva – Risposta al disturbo (con set-point nullo)
è il numero di poli nell’origine presenti nel regolatore
Set-point
Costante Errore costante Errore 0 Errore 0
Rampa Errore infinito Errore costante Errore 0
Parabola Errore infinito Errore infinito Errore costante
La simmetria alla base della struttura delle Tabelle e’ facilmente desumibile.
Abbreviazioni
FdT Funzione di trasferimento
TdL Trasformata di Laplace
LdR Luogo delle radici
I/O Ingresso-Uscita
SISO Single-Input-Single-Output
23
Appunti di Controlli Automatici – Comportamento a regime dei sistemi di controllo in retroazione– v. 1.0
Ing. Alessandro Pisano – pisano@diee.unica.itPuoi anche leggere