Misurare un terremoto: la magnitudo - Università degli Studi di Napoli "Federico II"
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Università degli Studi di Napoli “Federico II”
Scuola Politecnica e delle Scienze di Base
Area Didattica di Scienze Matematiche Fisiche e Naturali
Dipartimento di Fisica “Ettore Pancini”
Laurea triennale in Fisica
Misurare un terremoto: la magnitudo
Relatori: Candidato:
Dott. Guido Russo Dario Vincenzi
Matricola N85/1017
A.A. 2018 /2019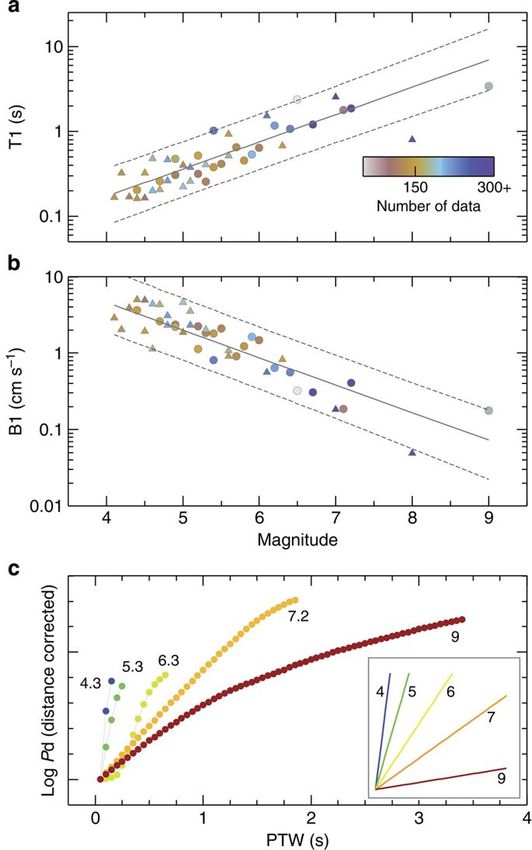
Indice
Introduzione 1
1.Nozioni preliminari sui terremoti 3
2. Magnitudo 5
2.1. Tipi di magnitudo 6
2.2. Saturazione delle scale 7
2.3. Magnitudo momento 11
2.3.1. Calcolo del momento sismico 11
3. Legge di Gutenberg e Richter 13
3.1. Prove per una differenza nell’iniziazione alla rottura tra piccoli e
grandi terremoti 17
Conclusioni 22
Bibliografia 23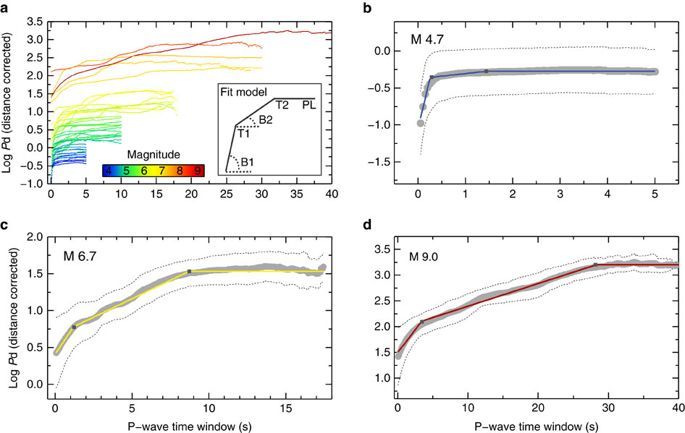
Introduzione
In questo lavoro di tesi mi occupo del problema della quantificazione della
“grandezza” di un terremoto. L’importanza di questo argomento è duplice. Da una
parte, ai fini di protezione civile è importante sapere se un terremoto è “grande” o
“piccolo” per organizzare gli eventuali soccorsi. In questo senso, la valutazione deve
essere fatta, anche approssimativamente, in tempi rapidi dopo l’evento sismico.
Dall’altra parte, avere una scala consente agli scienziati di paragonare terremoti diversi
ed individuarne analogie e differenze.
Dopo aver introdotto, nel capitolo 1, alcune nozioni preliminari sui terremoti, nel
secondo capitolo introduco il concetto di magnitudo e illustro i diversi tipi di scala che
si usano correntemente nella pratica sismologica. Nel terzo capitolo illustro la
relazione di Gutembeerg Richter sul numero di terremoti in un fissato periodo di
tempo. Dopo un’introduzione generale, ne dimostro la validità su di un data set di due
anni di terremoti (2017-18) ottenuti dal sito dell’United States Geological Survey (il
servizio geologico nazionale statunitense) ed analizzati con Microsoft Excel.
Nella seconda parte del capitolo discuto le implicazioni che la relazione di Gutemberg
Richter ha sulla conoscenza dei processi di generazione dei terremoti, anche alla luce
dei recenti risultati ottenuti da Colombelli et al. (2014).
!
!
!
!
!
!
!
!
! 2!
1. Nozioni preliminari sui terremoti
Un terremoto è uno scorrimento relativo di due masse rocciose a contatto lungo una
superficie detta faglia (figura 1.1). Per quanto riguarda le loro cause, nel 1906 il
sismologo californiano Reid, a seguito delle sue osservazioni relative al grande
terremoto che distrusse S. Francisco, formulò la teoria del rimbalzo elastico. Tale
teoria, come aggiornata in chiave moderna, suppone che i due blocchi che
rappresentano la faglia tendano a muoversi a causa di forze tettoniche. L’attrito statico
tra i due blocchi impedisce ad essi di scorrere, quindi l’effetto netto è che il materiale
intorno alla faglia si deforma, in prima approssimazione elasticamente. All’aumentare
della deformazione aumenta anche l’energia immagazzinata. Quando lo sforzo
tettonico supera l’attrito statico, si ha lo scorrimento che rilascia l’energia
immagazzinata sotto forma di onde sismiche (elastiche). Lo scorrimento cessa quando
lo sforzo tettonico scende al di sotto dell’attrito dinamico ed il ciclo ricomincia.
figura 1.1: esempio di faglia
L’intensità di un sisma dipende dalla quantità di energia che la roccia riesce a
immagazzinare prima di superare la sua soglia di sopportazione.
È importante dire che le onde generate da un terremoto sono composizioni di onde di
diverse frequenze e che alcune di queste onde sono di volume, altre superficiali, cioè
generate dall’interazione delle onde di volume con la superficie terrestre. Le onde
superficiali hanno ampiezza significativamente maggiore rispetto alle onde di volume,
ma frequenza significativamente minore come schematicamente mostrato nella figura
1.2.
! 3!figura 1.2: esempio schematico di sismogramma Le onde di volume sono di due tipi: P ed S. La loro differenza sta nel fatto che le onde P provocano lo spostamento del suolo in direzione parallela a quella di propagazione dell’onda (onde longitudinali) e sono più veloci delle onde S, che provocano lo spostamento del suolo in direzione ortogonale allo spostamento P (onde trasversali). Anche le onde superficiali sono di due tipi: di Rayleigh, che generano uno spostamento del suolo in direzione orizzontale, e di Love, che provocano invece uno spostamento orizzontale (Zollo e Emolo, 2012). ! 4!
2. Magnitudo
Non sfugge l’importanza di poter quantificare la “forza” di un terremoto, infatti, in
questo modo è possibile confrontare i terremoti tra di loro e determinare rapidamente
se un terremoto è dannoso oppure no.
Un primo modo di rappresentare la “grandezza” di un terremoto si basa sull’intensità
macrosismica e si misura tramite la scala Mercalli o sue varianti successive. Questa
scala quantifica i danni causati alle cose e alle persone dal terremoto. Questa scala
rappresenta un metodo di misura poco efficace. Infatti, consideriamo un terremoto
forte che avviene nel deserto. Esso avrà un’intensità macrosismica molto più bassa
rispetto a uno medio in una zona dove gli edifici non sono costruiti in maniera
antisismica, e quindi si hanno crolli, vittime e panico (elevato valore sulla scala
Mercalli).
È quindi evidente che la scala Mercalli non può rappresentare una misura oggettiva. È
però molto utile per la ricostruzione della sismicità storica, di cui le fonti scritte ci
tramandano una descrizione dei danni patiti da edifici e popolazione.
Una caratterizzazione oggettiva della “grandezza” di un terremoto deve basarsi su
quantità misurabili sul sismogramma. Questo rende anche la misura di tale
“grandezza” di determinazione rapida, quindi utile ai fini di protezione civile.
Il sismologo californiano Richter sviluppa così il concetto di magnitudo che si basa su
due semplici assunzioni. La prima è che, a parità di condizioni geologiche, i terremoti
più forti hanno una magnitudo maggiore, mentre la seconda è che le ampiezze delle
onde sismiche possono essere in prima approssimazione legate solo alla lunghezza del
tragitto sorgente-ricevitore (Richter, 1935).
La magnitudo di un terremoto viene espressa da una formula del tipo:
2.1 !!!!!!!!! = log!" ! + ! ! + !
dove A è l’ampiezza maggiore misurata sulle componenti del sismogramma ed
espressa in nanometri e R è la distanza ipocentrale1 espressa in chilometri. C’è un
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
1
!Se!la!distanza!tra!osservatore!e!faglia!è!molto!maggiore!delle!dimensioni!di!quest’ultima,!si!dice!
ipocentro!il!punto!in!cui!si!genera!il!terremoto.!L’epicentro!è!la!proiezione!dell’ipocentro!sulla!
superficie!terrestre.!
! 5!coefficiente di correzione per la distanza epicentrale che tiene conto del fatto che
l’ampiezza delle onde sismiche diminuisce con la distanza. D è un fattore di
calibrazione che tiene conto di eventuali effetti locali e strumentali.
2.1. Tipi di magnitudo
La prima realizzazione della (2.1) fu:
!! = log!" ! − log!" !!
Sfruttando il fatto che in California la zona sismogenetica è abbastanza ben delimitata,
Richter, usando sempre lo stesso tipo di sismografo, misurò terremoti con forme
d’onda simili, che avvenivano abbastanza in superficie (≅ 15!!" di profondità) e con
i raggi che si propagano nella sola crosta superiore e fu in grado di tabulare il fattore
correttivo !! in funzione della distanza epicentrale. Per il sud della California Hutton
e Boore (1977) proposero la relazione
! 2.2 !!!!!!! = log!" ! −2.09 + 1.11 log!" ! + 0.00189!
con ! < 1000 km. In altre zone della Terra varrà naturalmente una relazione diversa.
Si noti che la (2.2) è la (2.1) in cui è stato esplicitato il coefficiente C.
Le onde utilizzate per tale magnitudo sono le onde S, poiché per distanze regionali
(≅ 100!!") risultano avere ampiezze dominanti.
Tuttavia, l’ampiezza delle onde S decresce abbastanza rapidamente con la distanza
epicentrale. Questo implica che la magnitudo locale non può essere usata per terremoti
lontani. La definizione di magnitudo deve essere cambiata per questi terremoti (detti
telesismi).
Gutemberg (1945) propose una relazione del tipo
!
2.3 !!!!!! = log!" + ! ∆, ℎ + !
!
! 6!dove A è la massima ampiezza misurata in nanometri sul sismogramma, T è il periodo
del segnale e f è la correzione dovuta dalla distanza epicentrale Δ e profondità h
dell’ipocentro, dove si genera il terremoto. C è invece un coefficiente di calibrazione
analogo a quello che si trova nella (2.1). La correzione fu calcolata da Richter (1958)
per distanze epicentrali comprese tra 20° e 180°. Nel caso di un telesisma, le onde di
maggiore ampiezza sono le onde superficiali (figura 1.2). Il periodo tipico di queste
onde è compreso tra i 18 e 22 s. Questa magnitudo si indica con !! . Notiamo che il
rapporto ! ! ha le dimensioni di una velocità, quindi questa magnitudo è
implicitamente in relazione con l’energia liberata dal terremoto.
Attualmente la formula che si utilizza è (Borman, 2012)
!
!! = log!" + 1.66 log!" ∆ + 0.3
!
Il limite di !! sta nel fatto che l’ampiezza delle onde superficiali è molto sensibile
alla profondità dell’epicentro, quindi questa magnitudo non è adatta all’applicazione a
terremoti profondi. In questi casi si ricorre alla magnitudo volume definita in maniera
del tutto analoga alla precedente come
!
2.4 !!!!!! = log!" + ! ℎ, ∆ − 3.0
!
dove però la correzione per distanza epicentrale e profondità è diversa.
2.2. Saturazione delle scale
Le scale introdotte nel precedente paragrafo sono fatte per essere quanto più
compatibili tra di loro. Una perfetta compatibilità è però impossibile poiché per le tre
diverse magnitudo si sfruttano misure di ampiezza che dipendono da 3 frequenze
differenti, 1.25 Hz locale, 1 Hz volume e 0.05 Hz di superficie.
Si nota (Zollo e Emolo, 2012) che lo spostamento del suolo generato da un terremoto
ha uno spettro schematicamente caratterizzato da una parte piatta a bassa frequenza
! 7!che persiste fino a !! , detta frequenza d’angolo, al di sopra della quale lo spettro
decade come ! !! !(vedi figura 2.1). Il valore dello spettro a bassa frequenza aumenta
col crescere della magnitudo, mentre la frequenza d’angolo diminuisce.
Bisogna ora ricordare che la magnitudo viene misurata a frequenza fissata. In figura
2.2 possiamo vedere gli spettri di spostamento in relazione a !! e !!
Figura 2.1: spettro di ampiezza dello spostamento generato da un terremoto
! 8!Figura 2.2 : spettri di spostamento e saturazione delle scale. In ordinata compare
il logaritmo del momento sismico che verrà introdotto in seguito.
Si vede che per un terremoto di magnitudo 5 !! misura lo spostamento nella parte
piatta dello spettro, mentre per un terremoto di magnitudo 8 lo spostamento viene
misurato nella parte decrescente. Questo vuol dire che lo spostamento del terremoto di
magnitudo 8 è sottostimato rispetto al valore che si avrebbe misurando l’ampiezza
nella parte piatta dello spettro. In altre parole, al di sopra di una certa magnitudo le
stime di !! crescono meno rapidamente di quanto lo facciano al di sotto. Questo
fenomeno è detta saturazione della scala. Dalla figura si vede che per le onde di
volume la situazione è ancora più drammatica in quanto che al di sopra di magnitudo
5.9 la scala fornisce sempre lo stesso valore. Questo giustifica lo scarso utilizzo della
magnitudo volume.
2.3. Magnitudo momento
Per superare il problema della saturazione bisogna introdurre un’altra magnitudo, detta
magnitudo momento.
! 9!Un terremoto è strettamente legato alle forze che riesce a immagazzinare la roccia,
possiamo quindi introdurre una nuova quantità chiamata momento sismico. Si cerca
tramite questa quantità di analizzare l’energia che viene liberata da una frattura di una
faglia con relativo slittamento (vedi figura 1.1).
L’unità di misura di tale grandezza è il
!! !
dyne cm!= ! ! !"
risulta quindi un’unità di momento di una forza a tutti gli effetti.
Il momento sismico è una grandezza oggettiva. Il calcolo si fa partendo dalla traccia
lasciata dal sisma sul sismografo. Si nota un’inversa proporzionalità tra grandezza di
un terremoto e la frequenza di ginocchio, dove si definisce frequenza di ginocchio la
frequenza dominante delle varie onde. Generalmente si usano le onde P perché sono le
prime che arrivano al sismografo.
Osservando la figura 1.1 possiamo immaginare di attribuire lo scorrimento relativo ad
una coppia di forze parallela alla faglia e orientata nella direzione di dislocazione. Se,
in più, osserviamo il terremoto a distanze molto più grandi della dimensione della
faglia (come avviene per i telesismi), possiamo immaginare che la coppia sia applicata
nell’intorno di un punto (l’ipocentro). Si può dimostrare (Zollo e Emolo, 2012) che in
queste condizioni, ammettendo che il mezzo di propagazione delle onde sia illimitato,
omogeneo e isotropo, la componente radiale dello spostamento generato dalla sorgente
sismica è
1 !!
2.5 !!!!!! ! = !
4!"! ! ! !
dove !! !è il momento della coppia che genera il sisma (momento sismico), r è la
distanza del ricevitore dalla sorgente, ! la densità del mezzo di propagazione, c la
velocità di propagazione dell’onda sismica considerata, !! !è!un coefficiente di
radiazione.!Si dimostra altresì che il momento sismico è legato a quantità
caratteristiche della faglia dalla relazione
!!!!!(2.6)!!!!!!! ! = ! ∆!(!) Σ!
! 10!dove ! è la rigidità del mezzo, Σ è la superficie della faglia e ∆!(!) è il valore medio
della dislocazione sulla faglia ad ogni istante. Si noti che il momento sismico è legato
alle dimensioni della faglia ed alla dislocazione su di essa, quindi è effettivamente un
buon indicatore della “grandezza” di un terremoto. Sotto questo punto di vista la (2.6)
ci dice che la differenza tra un terremoto grande ed uno piccolo sta sollo nella
superficie di faglia e nell’entità della dislocazione. Consideriamo ora il valore Ω! dello
spettro dello spostamento a bassa frequenza
! !
!!"#
1 !!
Ω! = lim ! ! ! !" = ! ! !" = ! !!
!→! ! ! 4!"! ! ! !
da cui si ricava
4!"! ! !Ω!
!! =
!!
Il momento sismico si misura nella parte a bassa frequenza dello spettro il cui valore,
come abbiamo visto nel paragrafo precedente, aumenta con la magnitudo dell’evento.
Per definire una scala di magnitudo che non soffra di problemi di saturazione Hanks e
Kanamori (1979) partirono dalla relazione che lega l’energia sismica liberata ! allo
stress drop ∆!2
∆!
!= !
2! !
e dalla relazione di Gutemberg e Richter (1956) che lega l’energia alla magnitudo
log!" ! = 1.5!! + 11.8
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
2
!Lo!stress!drop!è!la!differenza!tre!lo!stress!iniziale!agente!sulla!faglia!e!quello!finale!(si!veda!il!capitolo!
1).!
! 11!con ! in erg. Dall’osservazione sperimentale che lo stress drop varia poco
mantenendosi compreso tra 1 e 10 Mpa per molti terremoti di magnitudo differente,
combinando le relazioni precedenti gli autori definirono la magnitudo momento !!
tramite la relazione
!! = 1.5 log!" !! − 10.7
con !! in erg.
La magnitudo momento viene usata in alternativa a !! quando quest’ultima risulta
superiore a 7. Non di meno, è possibile calcolarla per un terremoto di magnitudo
qualunque, a patto che si riesca a misurare il valore della parte piatta dello spettro.
! 12!3. Legge di Gutenberg e Richter
È noto che il numero di terremoti di piccola magnitudo è sensibilmente maggiore del
numero di terremoti di elevata magnitudo. Gutenberg e Richter (1954)
sperimentalmente stabilirono una legge che quantifica tale osservazione. La relazione
che essi individuano è la seguente:
3.1 !!!log ! (!) = ! − !"
dove N(M) è il numero di eventi sismici di magnitudo superiore a M, a è una costante
e rappresenta il numero di terremoti di magnitudo maggiore di zero, b è la pendenza
della retta che meglio approssima la distribuzione del logaritmo del numero di eventi
(vedi figura 3.1):
Figura 3.1 :Rappresentazione della legge di Guttenberg e Richter.
! 13!Come dimostrazione dei limiti di applicazione della legge di Gutemberg Richter ho considerato i dati della sismicità globale che possono essere attenti dal sito del National Earthquake Information Center (NEIC) mantenuto dal Servizio Geologico degli Stati Uniti (USGS). In figura 3.2 è rappresentato N(M) nel periodo 2017-18. Figura 3.2: Legge di Gutembeerg Richter per il periodo 2017-18. Notiamo subito che la relazione lineare vale per terremoti non troppo piccoli. Questo è dovuto al fatto che più un terremoto ha magnitudo piccola, più è difficile da individuare. Magnitudo piccola significa infatti ampiezza delle onde sismiche piccola, al limite paragonabile al rumore che affligge le stazioni che compongono la rete. In altri termini, qualunque rete sismica può rilevare terremoti al di sopra di una certa mgnitudo, e questo valore dipende dal numero di stazioni della rete, dalla loro distribuzione spaziale in relazione all’epicentro ecc. Questo valore è detto mgnitudo di completezza del catalogo. In figura 3.2 si può stimare che la magnitudo di completezza è di poco inferiore a 4.5. La legge fallisce anche per valori molto alti della magnitudo (superiori a 7.5). Fortunatamente, ci sono meno terremoti di grande magnitudo rispetto a quelli che ci si aspetta dalla relazione di Gutemberg Richter. Non è stata ancora data una spiegazione convincente di questo fatto. Il fit dei dati è stato effettuato nell’intervallo di magnitudo [4.4 , 8.2] fornisce ! = 1.04 ± 0.01. Valori di ! dell’ordine dell’unità sono tipici della sismicità globale (Lowrie, 2007), anche se possono variare col tempo. Quando si considera la sismicità ! 14!
regionale il valore di b cambia da zona a zona. In corrispondenza di grandi terremoti il
valore di b aumenta a causa della abbondanza di repliche a bassa magnitudo causate
dall’evento principale. In questo senso alcuni sismologi considerano la variazioni nel
tempo di b nella stessa regione tra i possibili elementi da tenere in considerazione per
la predizione di terremoti. In generale, valori alti di b indicano mezzi con alto grado di
fratturazione, con eterogeneità litologiche e scadenti qualità meccaniche, al contrario
valori bassi indicano mezzi con basso grado di fratturazione, elevata resistenza,
omogeneità.
La legge (3.1) può essere riscritta mediante la legge di potenza
3.2 !!!! !! = !! !! !! !.!
tenuto conto della relazione:
log !! = 1.5!!! + 16.1
(Lay e Wallace, 1995).
La legge di Guttenberg Richter espressa nella forma (3.2) restituisce una distribuzione
frattale.
Un frattale è caratterizzato dall’indipendenza di scala e dall’auto-similarità nel
dominio spazio-temporale, ovvero elementi costitutivi del frattale appaiono simili a
loro stessi se osservati in scale diverse. Questa invarianza si esplica su dimensioni che
si riducono secondo una legge di potenza che dipende da un coefficiente D, detto
dimensione frattale.
Il concetto di frattale è stato introdotto da Mandelbrot (1967). L’autore prese in
considerazione che, se si vuole dividere esattamente in N parti un rettangolo di
dimensioni X e Y, ciascun lato deve essere diviso in ! parti. Quindi il rapporto di
riduzione di ciascuna dimensione è
1
! ! =
!
Generalizzando a spazi a D dimensioni abbiamo
! 15!1
! ! =
!! !
da cui
log !
!=−
log !
Nel caso in esame si ha evidentemente ! = 1. Mandelbrot applicò esattamente lo
stesso procedimento al caso di curve che si costruiscono iterativamente e che sono
caratterizzate dal fatto che ad ogni passaggio mantengono la forma (curve di von
Koch). Se !! è la dimensione della partizione della curva all’i-mo passaggio e !! è il
rapport tra le dimensioni al passaggio i e quello i-1, vale la relazione
3.3 !!!!!! = !!!!!
dove C è una costante e D è maggiore di 1 ed è detta dimensione frattale. La legge di
Gutemberg Richter ha la forma (3.3).
Per capire quale ente fisico relativo alla sorgente sismica ha una dimensione che scala
frattalmente con la magnitudo, dobbiamo tener conto delle relazioni (Kanamori e
Andersono (1975)):
log!" ! ~ − log!" !
log!" ! ~!!
Il carattere frattale della legge di Gutemberg Richter è dovuto alla relazione che lega
magnitudo e superficie di rottura.
I terremoti sono dunque un esempio di fenomeno naturale frattale. Infatti, la faglia di
un terremoto grande può essere vista come somma di faglie di terremoti piccoli,
quindi la somma dell’energia sprigionata dalle singole faglie (piccole) mi darà
l’energia totale del terremoto grande.
! 16!Inoltre, l’ auto-similarità si traduce nel fatto che tutti i terremoti, grandi o piccoli, si
generano nella stessa maniera. La differenza è data da fattori successivi alla rottura
iniziale. Per esempio, eterogeneità strutturali del mezzo possono causare l’arresto della
rottura e quindi risultare in una bassa magnitudo. Si noti che la magnitudo porta in se
informazioni sulla sorgente perché i fattori legati alla propagazione vengono
empiricamente corretti (per esempio, la correzione distanza epicentrale-profondità).
3.1 Prove per una differenza nell'inizio della rottura tra piccoli e grandi
terremoti
I sistemi di early warning sismico sono procedure di analisi dati provenienti dalle
stazioni di una rete che consentono di determinare la magnitudo dell’evento sulla base
dell’analisi dei primi pochi secondi del segnale P e di lanciare un allarme nel caso di
terremoto forte. Ciò è in contrasto con quanto esposto nel paragrafo precedente Infatti
la rottura inizia allo stesso modo per i terremoti piccoli e grandi. Le condizioni di
attrito locale e le discontinuità geometriche della superficie di faglia controllano poi la
dimensione finale. Seguendo questo modello un evento sismico è un processo
stocastico per il quale non è possibile conoscere la dimensione finale fino a quando la
rottura non è terminata, ed è ancora più indeterminata se si considera solo l'inizio del
processo. Tuttavia, I sistemi di early warning funzionano correttamente in diverse parti
del mondo (California e Giappone, ma non solo).
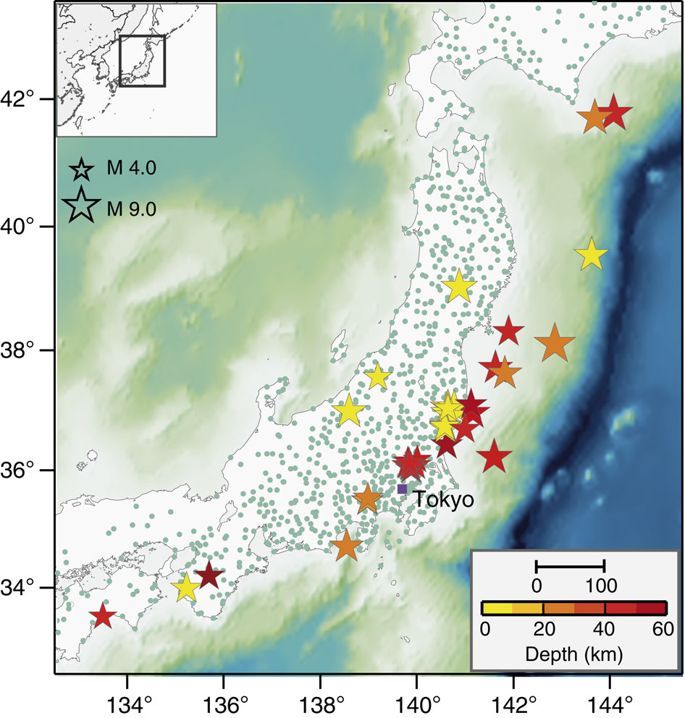
Per studiare questa contraddizione Colombelli, Zollo, Festa e Picozzi (2014), hanno
studiato l'ampiezza del picco di spostamento dei segnali filtrati dell'onda P (Pd) su una
finestra temporale progressivamente più larga. Utilizzando un set di dati di alta qualità
di 43 eventi giapponesi, da moderati a potenti, che coprono un’ampia gamma di
magnitudo (M) e distanza (R) (4≤M≤9; 0≤R≤500 km) gli autori analizzano più di
7000 forme d'onda a tre componenti registrate in 1.208 stazioni (in Figura 4.1 la
mappa delle stazioni utilizzate e gli epicentri degli eventi selezionati).
Questo studio si distingue da lavori precedenti sull'inizio delle forme d'onda di altri
autori per il fatto che essi analizzano alcuni terremoti registrati in un numero limitato
di stazioni o terremoti appartenenti alla stessa sequenza, condizioni quest’ultime in cui
! 17!può essere difficile riconoscere e discriminare chiaramente gli effetti di sorgente e propagazione che possono influenzare la forma iniziale dei segnali. Figura 4.1: Mappa delle stazioni utilizzate e gli epicentri degli eventi selezionati in Colombelli et altri. La dimensione della stella è proporzionale alla grandezza e il colore rappresenta la profondità della sorgente. La barra nera in basso a destra indica una lunghezza di 100 km. Calcolando la media dei dati da tutte le stazioni disponibili in qualsiasi momento (in genere più di 100), per ogni evento gli autori hanno ottenuto il logaritmo della curva di Pd in funzione dell’ampiezza della finestra temporale e hanno mostrato che ogni curva aumenta progressivamente con il tempo fino a raggiungere un valore finale stabile. Il livello di plateau (PL) e il tempo di saturazione generalmente aumentano con ! 18!
magnitudo (Fig. 4.3 a). Le osservazioni degli autori indicano che la forma iniziale delle curve Pd rispetto al tempo in genere segue l’andamento esponenziale. Figura 4.3: Curve LPW e adattamento al modello. (a) Logaritmo medio della curva Pd in funzione dell’ampiezza della finestra temporale (PTW) per ciascun evento analizzato. Gli autori passano poi a stabilire la possibile relazione di T1 (Tempo d’angolo, a cui comincia la transizione da valore iniziale a valore finale di Pd) e B1 (che misura la rapidità di transizione) con l'inizio del processo di rottura (vedi Figura 4.4). T1 aumenta con la magnitudo, mentre B1 è inversamente proporzionale ad essa. ! 19!
Figura 4.4. Fit dei parametri T1 e B1. (a) Tempo del primo angolo del modello di adattamento lineare a tratti in funzione della grandezza per tutti gli eventi analizzati su una scala log-lineare. La scala dei colori indica il numero di punti dati utilizzati per il calcolo medio al tempo T1. (b) Pendenza del segmento di prima linea del modello di adattamento in funzione della grandezza per tutti gli eventi analizzati su una scala log-lineare. Per ogni singolo valore B1, il colore è uguale a quello utilizzato in a per il corrispondente punto dati T1. In a e b, piccoli cerchi rappresentano gli eventi crostali (profondità della sorgente
osservazioni, dato l'adattamento esistente ai dati. Le barre di errore per i singoli punti dati sono più piccole della dimensione del simbolo. (c) Ingrandimento della curva PTW fino al tempo T1 per eventi rappresentativi. È stato assegnato un valore iniziale comune per confrontare la forma delle curve. Questi risultati indicano che l'evoluzione della curva PTW nella fase iniziale della rottura è in qualche modo correlata alla dimensione finale del terremoto. Il conclusione, lo studio vuole mostrare come l'evoluzione dello spostamento del picco dell'onda P nel tempo sia informativa riguardo allo stadio iniziale del processo di rottura e possa essere usata come proxy per la dimensione finale della rottura. Per il set di terremoti analizzato, si è riscontrato un rapido aumento iniziale del dislocamento dei picchi per piccoli eventi e una crescita più lenta per i grandi terremoti. questi risultati indicano che la rottura iniziale di un terremoto piccolo non è uguale a quella di un terremoto grande. Questo studio conferma i risultati sperimentali di lavori precedenti, ma getta chiaramente dei dubbi sulla comprensione che abbiamo maturato sui processi che generano un terremoto. ! 21!
Conclusioni In questo lavoro di tesi ho passato in rassegna le diverse implementazioni del concetto di magnitudo originariamente introdotto da Richter (1935). Ho illustrato i diversi tipi di magnitudo e descritto i limiti di ciascuno, riportandone gli ambiti di applicazione. Ho illustrato la relazione di Gutemberg Richter, applicandola ad un set di dati da me raccolto da cataloghi online pubblicamente disponibili. Questa relazione implica che i terremoti sono un processo frattale. In altri termini, tutti i terremoti si generano nella stessa maniera; sono poi altri fattori estranei ai processi di generazione che determinano la magnitudo di un sisma. Questo è stato un assioma della sismologia per molti decenni. In tempi recenti alcuni lavori sperimentali (tra cui Colombelli et al., 2014) hanno mostrato come, invece, vi siano differenze sin dalla fase iniziale della propagazione della frattura tra terremoti di magnitudo piccola e grande. Chiaramente questi risultati sembrano contraddire l’assioma, ma va detto che la ricerca sull’argomento è veramente al suo stadio iniziale. Se da una parte questo può essere sconfortante, perché mette in discussione un grosso bagaglio di conoscenze acquisite, dall’altro è uno sprone formidabile a migliorare la strumentazione e le reti sismiche, per approfondire la conoscenza teorica e riconciliare quello che ora sembra inconciliabile. ! 22!
Bibliografia Bormann, P. (Ed.) (2012). New Manual of Seismological Observatory Practice (NMSOP-2), IASPEI, GFZ German Research Centre for Geosciences, Potsdam; DOI: 10.2312/GFZ.NMSOP-2 Colombelli, S., Zollo, A., Festa, G., & Picozzi, M. (2014). Evidence for a difference in rupture initiation between small and large earthquakes. Nature communications, 5, 3958. Ellsworth, W. L. & Beroza, G. C. (1995). Seismic evidence for an earthquake nucleation phase. Science, 268, 851–855 Gutenberg, B. (1945a). Amplitudes of surface waves and magnitudes of shallow earthquakes. Bull. Seism. Soc. Am., 35, 3-12. Gutenberg, B., and Richter, C. F. (1954). Seismicity of the Earth and asscociated Phenomena. 2nd edition, Princeton University Press, 310 pp. Gutemberg, B., e Richter, C. F. (1956) Magnitude and energy of earthquakes, Ann. Geofis., 9, 1-15. Hanks , T. C., e Kanamori, H. (1979) A moment magnitude scale. J. Geophys. Res., 84, 2348-2350. Ishihara, Y., Fukao, Y., Yamada, I. & Aoki, H. (1992). Rising slope of moment rate functions: the 1989 earthquake off East Coast of Honshu. Geophys. Res. Lett. 19, 873– 876. Kanamori, H., & Anderson, D. L. (1975). Theoretical basis of some empirical relations in seismology. Bulletin of the seismological society of America, 65(5), 1073- 1095. Lay, T. & Wallace, T. C. (1995). Modern global seismology (Vol. 58). Elsevier. ! 23!
Lowrie, W (2007) Fundamentals of geophysics, Cambridge University Press. Mandelbrot, B. B. (1967) How long is the coast of Great Britain? Science, 56, 636- 638. Richter, C. F. (1935). An instrumental earthquake magnitude scale. Bull. Seism. Soc. Am., 25, 1- 32 Richter, C. F. (1958). Elementary seismology. W. H. Freeman and Company, San Francisco and London, viii + 768 pp. Turcotte, D. L. (1997). Fractals and chaos in geology and geophysics. Cambridge university press. Zollo, A. & Emolo A. (2012). Terremoti e onde, Liguori. Napoli. ! ! 24!
Puoi anche leggere