Il ruolo della tecnologia nel recupero della deambulazione
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
MR (2019)S1:S10-S12
Il ruolo della tecnologia nel recupero della
deambulazione
*Giovanni TAVEGGIA, **Laura PELIZZARI
* Habilita Hospitals & Research - Istituto Clinico di Sarnico (BG).
** Scuola di Specializzazione in Medicina Fisica e Riabilitativa, Dipartimento di Scienze Clinico-Chirurgiche, Diagnostiche e Pediatri-
che, Università degli Studi di Pavia.
L
a tecnologia robotica rappresenta scientifica per un ambito ancora poco rienze ambientali ridisegna le mappe
un’opportunità terapeutica molto esplorato del trattamento riabilitati- corticali e genera un fenomeno, indi-
promettente nei pazienti con di- vo. Con queste premesse il terapista pendente dalla lesione, che tecnica-
sabilità conseguente a danno neuro- può disporre oggi di tecnologie che mente è definito “disuse”. Così come
logico. Negli ultimi 15 anni le tecnolo- consentono una prolungata ed effica- l’esperienza ambientale è in grado di
gie progettate per il recupero della ce stimolazione del paziente con me- modificare in modo plastico la rappre-
deambulazione sono molto cresciute todi funzionali e sicuri per il recupero sentazione di mappe motorie cortica-
sia in termini di numero che di qualità della deambulazione. I fenomeni en- li, anche il “disuse”, riduce il volume
del trattamento. I risultati pubblicati dogeni o esogeni di plasticità attivati topografico delle aree anatomiche
in studi di neuroimaging su primati ed durante il trattamento robotico, sono escluse dal movimento ed impoveri-
umani hanno documentato i mecca- potenti modulatori delle strutture sce le mappe motorie corrispondenti.
nismi molecolari, sinaptici e cellulari corticali deputate alla memoria di cir- In studi su primati è stato evidenziato
della plasticità neuronale e la dinami- cuiti e sequenze di movimento nuove che escludendo le dita della mano dal
ca evoluzione delle mappe motorie attraverso l’esperienza ambientale (2). movimento, con una fasciatura, si ot-
corticali dopo tecniche di stimolazio- Sappiamo che dopo uno stroke una tiene una restrizione delle aree corti-
ne (1). Al contempo la tecnologia ro- quota del danno è irreversibile ma che cali corrispondenti alla parte distale
botica si è evoluta, si è adattata sem- il cambiamento delle abitudini e dei dell’arto superiore ed un ampliamen-
pre meglio alle necessità del paziente comportamenti del paziente possono to dei distretti più prossimali del brac-
diffondendosi nel mondo della riabili- sovrapporre al danno organico, un cio che mantengono contatto attivo
tazione. Questi elementi di spinta cul- danno di tipo funzionale condizio- con l’ambiente (3).
turale e commerciale hanno generato nante fenomeni di remapping moto- La ripetizione dei gesti rappresenta
un crescente interesse nella comunità rio. La restrizione di contatti ed espe- un importante fattore facilitante i mec-
Figura 1. Effects of disuse on motor maps in the absense of injury. The preferred forelimbs of normal, healthy adult squirrel monkeys were placed in soft, restri-
ctive casts for periods up to 5 months. ICMS mapping studies showed a progressive decrease in digit representation and a progressive increase in wrist/forearm
representation. These effetcs were reversible after removal of the cast. These studies demonstrate that disuse has a substantial impact on motor cortex representa-
tions interpendent of the injury-induced disuse and neuropathological changes associated with stroke or traumatic injury (Miliken et al., 2013).
10 Supplemento - Giornale italiano di Medicina Riabilitativa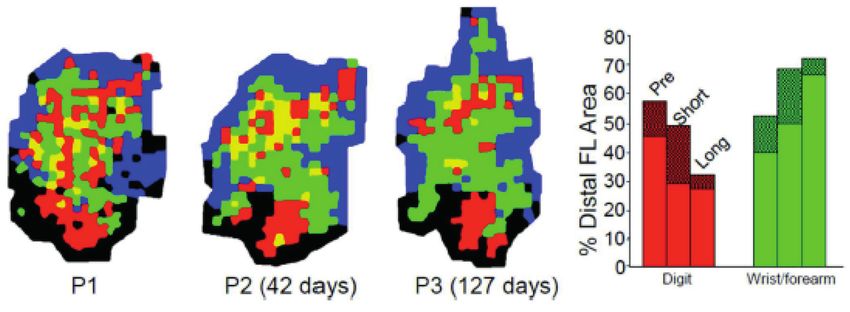
MR (2019)S1:S10-S12
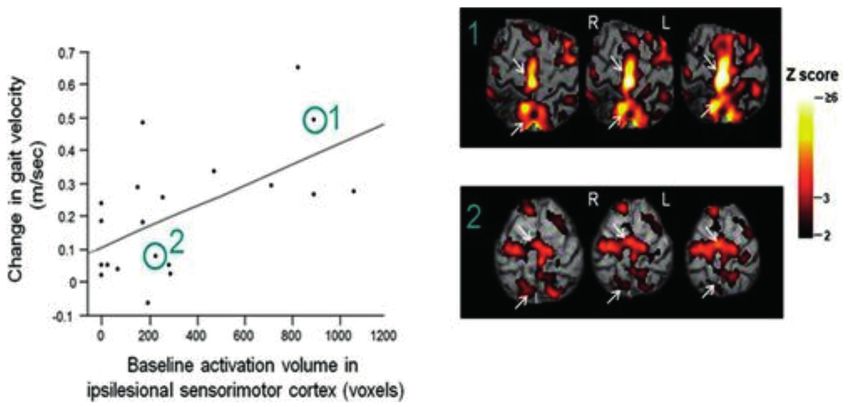
Figura 2.
canismi di plasticità neuronale che sono doppio cieco, con criteri di inclusione la deambulazione ma con destini pro-
alla base del riapprendimento moto- ed esclusione volti a rende il più omo- gnostici molto diversi fra loro. Per
rio. La tecnologia robotica, a tal pro- geneo possibile il campione reclutato. consuetudine la valutazione viene
posito, ci consente di effettuare un Dopo la randomizzazione i pazienti eseguita con indicatori funzionali dal-
numero considerevole di ripetizioni del gruppo sperimentale venivano le proprietà psicometriche monomo-
con elevata accuratezza e standardiz- trattati con terapia convenzionale e dali non specifiche, biomarkers multi-
zazione. Il 30-40 % dei pazienti so- Lokomat, mentre nel gruppo di con- modali (funzionali, neurofisiologici,
pravvissuti allo stroke presentano dif- trollo effettuavano la sola terapia con- neuroimaging) potrebbero stratificare
ficoltà durante la deambulazione. I venzionale. Le valutazioni funzionali in modo più preciso i pazienti e com-
dati di efficacia delle tecnologie robo- venivano eseguite prima dell’inizio porre casistiche più omogenee (6).
tiche pubblicati in letteratura in revi- del trattamento (T0), dopo 5 settima- Il secondo limite riguarda gli outco-
sioni sistematiche, riportano limiti ne di trattamento (T1) e dopo 12 set- mes. Se dobbiamo documentare l’effi-
metodologici per la selezione di casi- timane dalla fine del trattamento (T2) cacia di un trattamento con tecnolo-
stiche non omogenee e per il confron- in follow up. I miglioramenti più si- gia robotica, su una funzione com-
to di trattamenti molto differenti per gnificativi della velocità del cammino plessa come la deambulazione, è pre-
durata ed intensità. Gli outcomes pri- e della funzionalità della deambula- feribile usare indicatori qualitativi più
mari sono generici e poco aderenti zione sono stati evidenziati nei pa- sensibili ai cambiamenti dell’arto in-
alla specificità del trattamento esegui- zienti del gruppo trattato con Loko- feriore (domini dell’ICF ad esempio)
to. I risultati più incoraggianti riguar- mat al termine del trattamento (T1), ed indicatori quantitativi per la misu-
dano pazienti trattati con tecnologia nel follow up invece è apparso più si- ra globale dell’autonomia del pazien-
nei primi sei mesi dallo stroke o dalla gnificativo il miglioramento dell’en- te. Infine il terzo limite riguarda il
lesione midollare in fase post acuta, durance (6MWT) nei pazienti del trattamento. La tecnologia robotica
mentre nei pazienti cronici il tratta- gruppo di controllo. propone principalmente un lavoro
mento con tecnologia è giudicato so- Confrontando i nostri risultati con simmetrico. La maggior parte delle at-
vrapponibile al trattamento conven- la letteratura più recente possiamo tività quotidiane dalla deambulazio-
zionale (4). condurre una analisi critica utile a ca- ne, alla salita discesa della scale, alla
Anche in Habilita abbiamo studia- pire la strategia migliore per studi corsa rispondono a principi fisiologici
to l’efficacia di trattamenti con tecno- d’efficacia in neuroriabilitazione. I li- di inter-limb coordination necessari per
logia robotica in 6 bracci di ricerca re- miti più comuni dei lavori pubblicati la sincronizzazione dei movimenti fra
lativi a pazienti con disabilità neuro- sull’uso della tecnologia nel recupero emisomi. In realtà dopo una lesione
logica ed in particolare uno di questi funzionale della deambulazione ri- del sistema nervoso il sistema perde la
studi è stato eseguito su pazienti post guardano 3 aspetti fondamentali. Il simmetria funzionale e i parametri ci-
acuti in esiti di stroke (5). Abbiamo primo aspetto è la stratificazione dei nematici degli arti paretici cambiano
scelto come disegno di studio un trial pazienti. Spesso le casistiche aggrega- durante la deambulazione. Stimolan-
clinico randomizzato controllato in no pazienti simili per funzionalità del- do con perturbazioni l’arto sano pos-
Supplemento - Giornale italiano di Medicina Riabilitativa 11
MR (2019)S1:S10-S12
siamo attivare risposte sull’arto plegi- cupero della deambulazione, oggi tro- adult squirrel monkeys. J Neurophysiol.
co facilitandone il reclutamento della vano riscontri positivi anche attraver- 2013 Mar;109(5):1268-82.
4. Mehrholz J, Thomas S, Werner C, Kugler
muscolatura antigravitaria coinvolta so metodi di validazione scientifica. J, Pohl M, Elsner B. Electromechani-
durante la deambulazione. Questi cal-assisted training for walking after
aspetti tecnici di trattamento possono Bibliografia stroke. Cochrane Database Syst Rev.
aggiungere significativo valore all’ef- 2017 May 10;5:CD006185.doi:
ficacia della terapia per il recupero 1. Feldman DE, Brecht M. Map plasticity in 10.1002/14651858.CD006185.pub4.
somatosensory cortex. Science. 5. Taveggia G, Borboni A, Mulé C, Villafañe
della deambulazione.
2005;310:810–815. JH, Negrini S. Conflicting results of ro-
In conclusione le esperienze di- 2. Harold Adams, Randolph Nudo. Mana- bot-assisted versus usual gait training
sponibili in letteratura sui sistemi ro- gement of patients with stroke is it time during postacute rehabilitation of stroke
botici hanno contribuito a selezionare to expand treatment options ? Ann neu- patients: a randomized clinical trial. Int J
nel tempo criteri di misura accurati rol. 2013 July ; 74(1): 4–10. Doi:10.1002/ Rehabil Res. 2016 Mar;39(1):29-35.
ana.23948 6. Burke E, Dobkin BH, Noser EA, Enney
per valutazioni d’efficacia del tratta-
3. Milliken GW, Plautz EJ, Nudo RJ.Distal LA, Cramer SC. Predictors and biomar-
mento riabilitativo. Inoltre le buone forelimb representations in primary mo- kers of treatment gains in a clinical
impressioni rese dai pazienti dopo tor cortex are redistributed after fore- stroke trial targeting the lower extremi-
trattamento con tecnologia, per il re- limb restriction: a longitudinal study in ty. Stroke. 2014 Aug;45(8):2379-84.
12 Supplemento - Giornale italiano di Medicina RiabilitativaPuoi anche leggere