Fotogrammetria diretta con UAV: attuali limiti e possibili sviluppi futuri - Autori: F. Chiabrando, A. Lingua, M. Piras 20/21 febbraio 2014 - Modena
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

UAV/RPAS in Italia – Piattaforme, regolamenti, applicazioni, problematiche
Fotogrammetria diretta
Politecnico di Torino –
con UAV: attuali limiti
e possibili sviluppi
futuri
DIATI
Autori: F. Chiabrando, A. Lingua, M. Piras
20/21 febbraio 2014 - Modena
Sommario
1. Introduzione
• UAV
• Applicazioni fotogrammetriche
• Fotogrammetria diretta?
2. Test e risultati
• Mikrokopter v1 & v2
• Drako – Selex MUAS
3. Possibili futuri sviluppi
4. Considerazioni conclusive
DN Dw Dk
DRACO DE [m] [m] DH [m] [gon] Df [gon] [gon]
m 0.318 1.126 -0.870 0.6655 -0.0348 -0.0856
s 0.858 1.005 0.971 1.791 1.712 3.501
min -1.099 -1.577 -2.817 -4.0585 -7.6589 -9.2140
-
max 2.266 3.456 -1.697 6.2726 6.1391 10.3219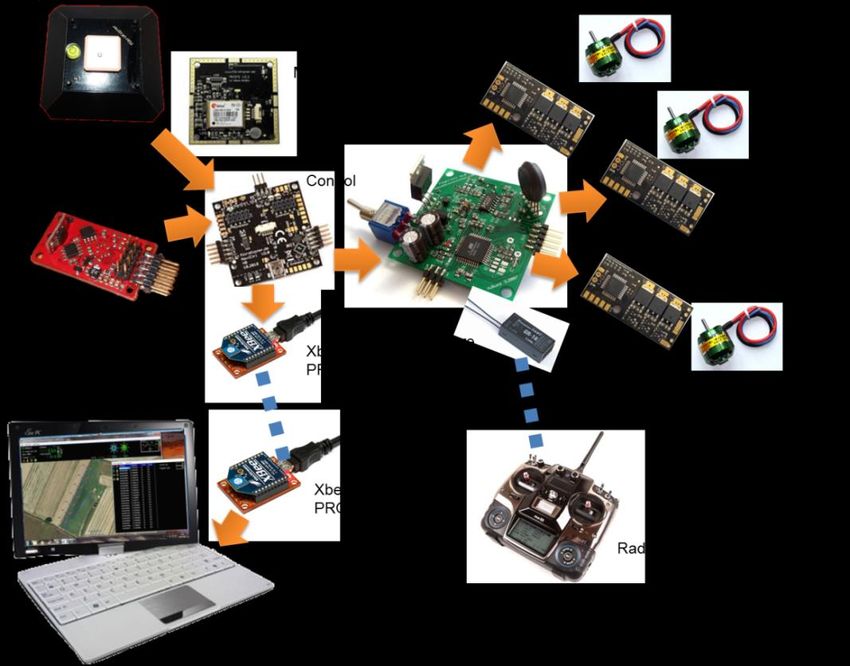
Introduzione
Unmahned Aerial Vehicle (UAV)
Il mondo UAV/RPAS è in continua evoluzione, sia per scopi militari
(ricognizione e altre questioni belliche) che civili, ma non esistono ancora dei
sistemi capaci di soddisfare tutte le necessità della Geomatica.
Introduzione
Applicazioni fotogrammetriche
Esistono diverse soluzioni commerciali nate per scopi fotogrammetrici, e
numerosi contributi scientifici ne hanno dimostrato l’efficacia metrica, in
applicazioni sostanzialmente close range (a prescindere dagli aspetti
legali) mediante camera digitale leggera:
Introduzione
Fotogrammetria diretta ?
Per permettere la navigazione autonoma, sono
dotati di sensori di navigazione a basso costo
GPS/GNSS (in genere u-blox) e IMU (MEMs)
Problemi
• Gli strumenti commerciali sono chiusi e permettono scarsa
interazione con i dati grezzi
• La precisione/accuratezza dei sensori in ambito dinamico
• Calibrazione del sistema (Level arm, Mounting, …)
• Sincronizzazione della camera con i sensori di navigazione viene
spesso risolta in modo creativo
Occorre approfondire il problema per:
• comprendere meglio i limiti applicativi di questi strumenti;
• proporre eventuali miglioramenti per applicazioni
fotogrammetriche dirette
Introduzione
Casistica
Hexakopter di Mikrokopter (v2011)
Hexakopter di Mikrokopter
(v2012) personalizzazione
di RESTART
Draco di Selex
Galileo MUAS
Limiti di riferimento in
applicazioni cartografiche
sXYZ = 0.2 n (scala 1:n)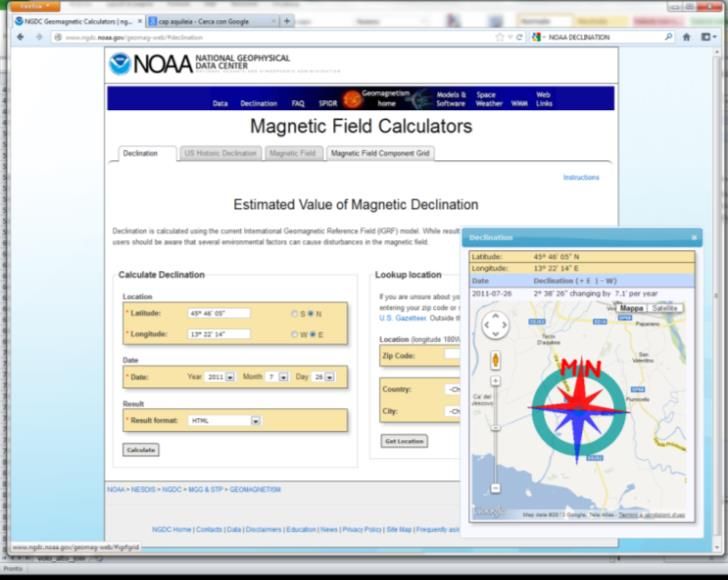
HexaKopter di Mikrokopter (v2011)
• Vendita in kit (< 2000 €)
• Ricevitore GPS integrato u-blox 4H
• Flight Control integra MEMs e
bussola elettr. (assetto angolare)
• Camera Sony Nex 5 (sensore DX 14
Mpixels, ottica fissa 16 mm, 600 €)
montata su supporto servo assistito
(2 rotazioni)
• Trasmissione video analogica in real
time (2.4 GHz)
• Trasmissione telemetria in real time
via XBee
HexaKopter di Mikrokopter (v2011)
Lo schema
Dati registrabili:
•Lo stream video in
tempo reale
• La telemetria
• traiettoria e assetto
volo
HexaKopter di Mikrokopter (v2011)
La navigazione automatica
Fissata la quota, è possibile attivare la navigazione automatica per
mezzo di Waypoints
HexaKopter di Mikrokopter (v2011)
Il caso reale: Aquileia
GSD medio 5-7 mmHexaKopter di Mikrokopter (v2011)
La triangolazione fotogrammetrica
Volo alto Volo basso
GSD medio 5-7 mm
H media = 17 m (62 immagini) H media = 14 m (29 immagini)
vXY(GCP) = 4 mm vz(GCP) = 16 mm vXY(GCP) = 3 mm vz(GCP) = 11 mm
vXY(CP) = 11 mm vz(CP) = 17 mm vXY(CP) = 6 mm vz(CP) = 13 mmHexaKopter di Mikrokopter (v2011)
Il confronto
Acquisizione ad inizio e alla fine di
ogni volo del monitor del PC con la
visualizzazione del tempo GPS.
L’angolo k è stato corretto di
declinazione magnetica e
convergenza del meridiano
In applicazioni cartografiche:
http://www.ngdc.noaa.gov/geomag-
Solo angoli w f: Ds = 0.18 cm (1:1000)
web/#declination Influenza k: Ds =0.39 m (1:2000)
Centro di presa XY: 1:10000
Centro di presa Z: 1:25000
DE [m] DN [m] DH [m] Dw [gon] Df [gon] Dk [gon]
m 1.377 0.556 -0.338 0.687 0.321 0.575
s 1.781 2.103 4.223 1.888 1.601 4.254
min -0.078 -2.817 -6.252 -4.827 -3.155 -10.370
max 3.188 5.211 7.168 5.697 5.091 12.294HexaKopter di Mikrokopter (v2012) Ricevitore GPS u-blox 6S Motori sviluppati in proprio (RESTART) Doppia batteria (durata volo ~17 min)
HexaKopter di Mikrokopter (v2012)
I testHexaKopter di Mikrokopter (v2012)
Comparazione Est-Nord
DE [m] DN [m]
m -0.034 0.890
s 2.420 1.744
min -9.841 -6.977
max 7.906 11.402
Oltre 20000 punti
In applicazioni
cartografiche
Precisione centro di presa
in planimetria:
1:10000
Soluzione A-GPS
(EGNOS)HexaKopter di Mikrokopter (v2012)
Comparazione altezza relativa
DH [m]
m 0.277
s 1.465
min -8.794
max 9.352
Oltre 20000 punti
In applicazioni
cartografiche:
Precisione centro di
presa in quota
1:10000
Soluzione A-GPS
(EGNOS)Draco di Selex Galileo MUAS
Il velivolo
Costo 50-100 k€
Decollo/atterraggio automatici
Batterie potenziate per 20
minuti di volo
Ricevitore u-blox 5H
IMU MEMS (calibrato) ad alta
velocità proprietario
Servocomando della camera
con registrazione dell’istante
di scatto
Stazione di
controllo a terra
professionale
2 pod disponibili:
fisso (nadirale e
orizzontale)
BrandeggiabileDraco di Selex Galileo MUAS
Il volo su poligono
Prima parte del volo manuale
II parte volo automatico
Circa 450 immagini acquisite
di cui utilizzate 51
H media 18 m
GSD medio 11 mmDraco di Selex Galileo MUAS
Risultati di confronto
L’istante di scatto viene registrato in un apposito file di log.
Il sistema è stato calibrato mediante misure in laboratorio (level arm e
mounting)
DRACO DE [m] DN [m] DH [m] Dw [gon] Df [gon] Dk [gon]
m 0.318 1.126 -0.870 0.665 -0.034 -0.085
s 0.858 1.005 0.971 1.791 1.712 3.501
min -1.099 -1.577 -2.817 -4.058 -7.658 -9.214
max 2.266 3.456 -1.697 6.272 6.139 -10.321
In applicazioni cartografiche:
Solo angoli w f: Ds = 0.18 cm (1:1000)
Influenza k: Ds =0.31 m (1:2000)
Centro di presa XY: 1:5000
Centro di presa Z: 1:5000
In generale, migliorano lievemente rispetto all’Hexakopter.
I dati non sono ancora accettabili per fotogrammetria
diretta a grande scala, ma solo a media scala.E se la tecnologia fosse già disponibile?
Ipotizzando di usare dei sensori “terrestri” ma
potenzialmente trasferibili (per peso, costo e
complessità) su un micro-UAV e considerando le loro
prestazioni (in termini di sqm), quali performance si
otterrebbero?
Payload > 500 kg Payload < 2 kg
sqm posizione = 2 cm / 4cm
Condizioni sqm angoli = 2.0°E se la tecnologia fosse già disponibile?
Camera: Panasonic GF3
H volo = 20 m
NO GCP DE [m] DN [m] DH [m] 4 GCP DE [m] DN [m] DH [m]
m -0.071 -0.133 -0.096 m -0.027 -0.044 0.079
s 0.239 0.177 0.382 s 0.179 0.085 0.263
max 0.284 0.191 1.483 max 0.226 0.180 0.498
Min -0.569 -0.461 -0.418 Min -0.334 -0.187 -0.487Quali sono i problemi reali? Possibili sviluppi futuri Nel mondo “reale”, i problemi aperti sono: - sensori a bordo vs peso vs durata del volo; -Integrazione sensori navigazione (GNSS, IMU); - sincronizzazione sensori e memorizzazione dati;
Quali sono i problemi reali? Possibili sviluppi futuri … - protocolli di comunicazione e formati dati - metodi di calibrazione micro-MEMS in dinamico - calibrazione antenne patch; - eliminazione delle interferenze elettromagnetiche; - algoritmi di fissaggio ambiguità e di verifica integrità; -stima della posizione con PPP (per soluzione differenziale); - …. …e poi post-processing o in tempo reale? Per il real time (se serve!?)….la strada della ricerca è ancora molto lunga.
Quali sono i problemi reali?
Possibili sviluppi futuri
SIRIUS PRO
MAVINCI
Costo €
mikrokopter con micro pc
e sensori per la
navigazione di precisione
Costo €Considerazioni conclusive Le verifiche effettuate permettono di affermare che, allo stato attuale, i sistemi UAV non permettono di svolgere applicazioni di fotogrammetria diretta a grande scala, ma avendo l’accortezza di volare a bassa quota possono essere utilizzati per applicazioni cartografiche a media scala. Il problema principale non è nella stima degli angoli ma nella definizione della posizione del centro di presa (GNSS) a causa dell’uso di sensori e di procedure in real time che non garantiscono le precisioni/accuratezze richieste. In presenza di una sincronizzazione più raffinata e IMU più costosa i parametri di orientamento esterno di ogni immagine migliorano sensibilmente (DRACO) e permettono una cartografia in scala 1:5000. Per affrontare applicazioni cartografiche a grande scala occorre iniziare a sviluppare sistemi UAV che integrino sensori di navigazione (in particolare GNSS) più raffinati e permettano la memorizzazione dei dati grezzi garantendo soluzioni in post-processing più rigorose e come dimostrano da numerosi studi spesso più precise e accurate.
Ringraziamenti Horea BENDEA* per il supporto tecnico sugli UAV; Paolo MASCHIO* per il prezioso pilotaggio degli UAV; Irene AICARDI* per l’aiuto nel trattamento dati; Fabio PAONESSA**per il supporto nella parte elettronica. • * Politecnico di Torino – DIATI • ** CNR - IEIIT
Puoi anche leggere