Controllori PID e tecniche "anti wind-up"
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
1
Controllori PID e tecniche ”anti
wind-up”
Giovanni Testolin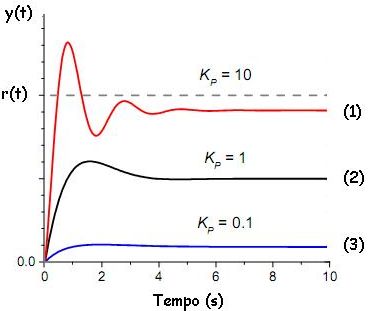
Indice
1 Introduzione ai controllori PID 4
1.1 Azione proporzionale . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Azione integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Azione derivativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Il PID nel suo insieme . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Tecniche ”anti wind-up” 15
2.1 Desaturazione dell’azione integrale . . . . . . . . . . . . . . . . . . . 16
2.2 Ricalcolo del termine integrale . . . . . . . . . . . . . . . . . . . . . . 20
2.3 IMC (internal model control) . . . . . . . . . . . . . . . . . . . . . . 23
2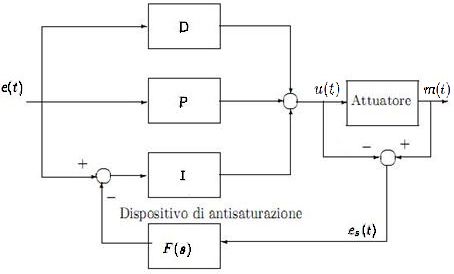
Introduzione
L’argomento trattato all’interno di questa tesi riguarda i controllori PID nel loro in-
sieme ed in particolare le tecniche anti wind-up.
Nel primo capitolo vengono analizzate dettagliatamente le parti fondamentali del con-
trollore PID, documentate con schemi funzionali e con simulazioni dei vari processi.
Nel secondo capitolo viene esposto il problema del wind-up, dovuto alle saturazioni
degli attuatori e alla presenza dell’azione integrale nei sopracitati controllori PID;
vengono inoltre presentate delle possibili soluzioni (attraverso schemi anti wind-up)
per poter migliore la dinamica del sistema.
3Capitolo 1
Introduzione ai controllori PID
Il controllore PID è un algoritmo di controllo dotato di una struttura predefinita, che
viene tarato modificando il valore di alcuni paramentri. Grazie alla sua semplicità
di utilizzo, combinata ad una apprezzabile efficacia in diversi campi di impiego, è
l’algoritmo di controllo di gran lunga piu usato nelle applicazioni industriali.
Dal punto di vista matematico, il regolatore PID è un sistema dinamico che elabora
un segnale in ingresso, detto ”errore” (ottenuto come differenza fra il riferimento e
la variabile controllata e(t) = r(t) − y(t)) dando poi in uscita un segnale di controllo
u(t) (Figura 1.1).
Figura 1.1: Schema di un sistema di controllo in retroazione.
Il successo dei PID è dovuto principamente a:
• Notevole efficacia nella regolazione di un’ampia gamma di processi industriali
(processi termici, meccanici, ecc.);
• Possibilità di essere realizzati con tecniche diverse (meccaniche, idrauliche, elet-
troniche sia analogiche che digitali, ecc.);
45
• Relativa semplicità di taratura dei parametri di lavoro in quanto il loro utilizzo
non necessita da parte dell’operatore una conoscenza dettagliata del processo
da controllare;
• Buon rapporto efficacia/costo perchè,in presenza di inevitabili condizioni di ru-
more o di inopportune calibrazioni errate,l’efficacia della legge di controllo de-
cade,quindi l’utilizzo di altri sistemi di controllo piu raffinati sarebbe inutile,in
quanto le loro prestazioni diverrebbero equiparabili a quelle dei PID;
• Duttilità nel loro utilizzo; difatti spesso vengono impiegati per ottenere confi-
gurazioni piu articolate per rispondere a esigenze complesse.
Il regolatore PID nella sua forma base, ha una struttura comprendete la somma di
tre termini di controllo
Z t
de(t)
u(t) = KP · e(t) + KI · e(τ )dτ + KD ·
0 dt
I parametri che identificano il PID dunque sono KP , KI e KD ed essi sono chiamati
anche gradi di libertà del controllore.
Passiamo ora a osservare nel dettaglio le parti che compongono la struttura del con-
trollore PID.6 CAPITOLO 1. INTRODUZIONE AI CONTROLLORI PID
1.1 Azione proporzionale
La prima azione è quella chiamata proporzionale in quanto lega algebricamente l’in-
gresso e(t) e l’uscita u(t) secondo una costante KP chiamata guadagno proporzionale.
Guardando la formula base del PID espressa in precedenza, possiamo capire quale
significato assume il guadagno proporzionale KP quando lavora in condizioni di re-
golatore puramente proporzionale (KI = KD = 0).
In queste condizioni il regolatore provoca l’attuazione di una correzione proporziona-
le (con costante di proporzione KP ) all’errore e(t). Al crescere di KP la velocità di
risposta del sistema migliora ma, diminuisce la stabilità aumentando le oscillazioni.
Il parametro caratteristico dell’azione proporzionale, KP , ha una definizione pret-
tamente teorica, infatti nella realtà industriale al posto di quest’ultimo si fa invece
riferimento ad un altra grandezza chiamata Banda Proporzionale e indicata con il
simbolo BP , legata a KP e definita nel seguente modo:
BP è la variazione dell’ingresso e(t) ( espressa in percetuale) che porta l’uscita u(t)
al suo valore di fondo scala.1.1. AZIONE PROPORZIONALE 7
Di seguito sono evidenziati due esempi nei quali si ha un campo di valori uguale per
ingresso ed uscita del PID e si può vedere come nel primo caso la percentuale di
variazione dell’ingresso e(t) che provoca il raggiungimento da parte dell’uscita u(t)
del suo valore di fondo scala è del 50% mentre nel secondo caso avviene la stessa cosa
ma con una variazione del 25%.
Figura 1.2:
Quando KP è espresso come rapporto tra i segnali normalizzati ai rispettivi valori di
fondo scala, cioè
u(t)/uf
KP =
e(t)/ef
dove uf è il valore di fondo scala di u(t) ed ef è il valore di fondo scala di e(t), si può
usare la seguente relazione tra BP e KP
100
KP =
BP
dalla quale si evince che riducendo la banda proporzionale si ottiene una maggiore
precisione dello strumento in quanto è sufficiente una minore variazione dell’errore in
ingresso perchè questa porti ad un significativo cambiamento in uscita.
Dunque riducendo la banda proporzionale il guadagno aumenta e la precisione mi-
gliora (aumenta la velocità di risposta) ma non è tutto, infatti a un aumento del
guadagno corrisponde anche un aumento del valore raggiunto all’uscita del blocco8 CAPITOLO 1. INTRODUZIONE AI CONTROLLORI PID
P,che si discosterà sempre di meno dal valore originale del segnale r(t) senza però
raggiungerlo a causa dell’errore a regime.
All’aumento del guadagno c’è però un limite dovuto al fatto che oltre un certo valore
il sistema entra in uno stato di auto oscillazione, cioè di instabilità.
Figura 1.3:
Nella Figura 1.3 sono riportati dei grafici che raffgurano gli effetti di una banda
proporzionale eccessivamente piccola (1), adeguata (2) ed eccessivamente grande (3).1.2. AZIONE INTEGRALE 9
1.2 Azione integrale
La seconda azione è quella integrale il cui contributo è proporzionale all’integrale
dell’errore e(t) (quindi proporzionale al suo valor medio) e in cui la costante KI è
data dall’inverso della costante di tempo integrale TI (chiamata anche tempo di re-
set)moltiplicata per il guadagno proporzionale
KP
KI =
TI
Questa azione ha come caratteristica principale quella di eliminare l’errore a regi-
me causato dal blocco proporzionale, che si presenta qualora si abbia a che fare con
un gradino di riferimento.
Infatti l’uscita di questo blocco è proporzionale all’integrale nel tempo dell’errore
in ingresso e(t), e nel caso di un segnale di riferimento r(t) a gradino, l’integrale
crescerà sempre più come vediamo in Figura 1.4 .
Figura 1.4:
Questo significa che, grazie alla retroazione, viene riportato in ingresso e mitiga l’in-
fluenza del segnale di riferimento r(t) sul sistema; infatti l’integrale dell’errore au-
menta finchè esso è positivo e diminuisce quando e(t) assume valori negativi.
Per questo blocco, il termine variabile da definire in base al sistema con cui si ha
a che fare, è la costante di tempo di integrazione indicata da TI ; da essa infatti
dipende l’effetto di integrazione che è tanto maggiore quanto più TI è ridotta. Infatti
riducendo la costante di tempo, l’integrale salirà più velocemente verso il valore e(t)
in ingresso al blocco, pagando però questa velocità di salita con delle forti oscillazioni
che richiedono tempo prima di stabilizzarsi. Viceversa aumentando TI e facendolo
tendere ad infinito si ha come conseguenza l’eliminazione dell’effetto dell’integrale.10 CAPITOLO 1. INTRODUZIONE AI CONTROLLORI PID
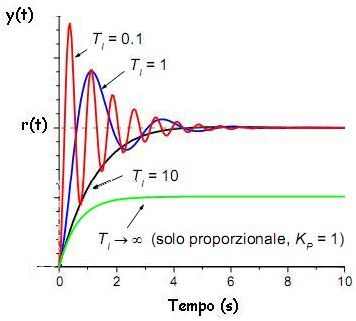
Per chiarire meglio il concetto si riporta in Figura 1.5 il grafico dell’andamento di
un controllore formato dai blocchi proporzionale ed integrale e si forniscono i risultati
dell’uscita per diversi valori di TI .
Figura 1.5:1.3. AZIONE DERIVATIVA 11
1.3 Azione derivativa
La terza azione è quella derivativa che fornisce in uscita la derivata rispetto al tempo
dell’errore e(t),dove la costante KD è data dal prodotto tra il guadagno proporzionale
e la costante di tempo derivativa TD
KD = KP · TD
La sua funzione consiste nel derivare il segnale che si trova al suo ingresso, perciò
tiene conto delle rapide variazioni dell’errore e cerca, in qualche modo, di anticipare
la futura azione correttiva.
In pratica, non potendo essere utilizzata come azione singola per inserire un riferimen-
to costante a causa dello zero che introduce nell’origine, la sua funzione si concretizza
in una riduzione delle oscillazioni del segnale attorno al valore d’uscita, mentre per
quanto riguarda l’offset non lo influenza in alcun modo.
Infatti le proprietà della derivata sono quelle di aumentare in modo proporzionale
alla velocità di variazione della grandezza a cui fa riferimento, perciò nel caso in cui
il segnale r(t) assuma una forma a gradino,l’azione derivativa agirà in modo da inse-
guire l’errore e correggerlo velocemente.
Il parametro che governa questo blocco è la costante di tempo derivativa indicata
dal simbolo TD , il cui valore determina la velocità di salita del segnale.
Di seguito,in Figura 1.6, si può apprezzare l’azione anticipatrice del blocco derivatore
e la sua correzione sulle oscillazioni attorno al valore desiderato,inoltre si conferma la
non incidenza sull’offset tra y(t) ed r(t).12 CAPITOLO 1. INTRODUZIONE AI CONTROLLORI PID
Figura 1.6:
Il termine derivativo purtroppo introduce l’inconveniente di amplifcare i segnali con
contenuto armonico a frequenze elevate.
Siccome in genere questo tipo di segnali corrispondono al rumore elettromagneti-
co sovrapposto al segnale utile, l’utilizzo del termine derivativo deve essere valutato
con cautela.
Per capire meglio come il rumore di misura venga amplificato dal termine deriva-
tivo, consideriamo un rumore approssimabile da un segnale sinusoidale in ingresso al
blocco derivatore
n(t) = Asin(ωt)
Tale segnale all’uscita del blocco derivatore diventerà:
dn(t)
un (t) = TD = ATD ωcos(ωt)
dt
quindi segnali di rumore aventi un contributo sensibile alle alte frequenze, e quindi
una ω molto alta, vengono amplificati notevolmente dal termine derivativo del PID.1.4. IL PID NEL SUO INSIEME 13
1.4 Il PID nel suo insieme
Oltre alla configurazione PID, come accennato prima, si trovano industrialmente uti-
lizzate anche altre configurazioni ognuna con peculiarità proprie e specifiche per dati
processi.
• Configurazione P : viene utilizzato nei sistemi nei quali sono consentiti sco-
stamenti tra il valore a regime della grandezza controllata e quello desiderato,
come ad esempio negli impianti di riscaldamento degli edifici. Infatti esso intro-
duce un errore a regime in funzione di KP , aumenta la velocità di risposta del
sistema e, con guadagno elevato, diminuisce la stabilità aumentando le oscilla-
zioni.
• Configurazione PI : l’unione di questi due moduli permette di ottenere una
maggiore precisione senza peggiorare il grado di stabilità del sistema (sempre
che le costanti siano opportunamente scelte), unita ad una maggiore velocità di
risposta. Vengono utilizzati quando è richiesto un errore a regime di modesta
entità unito ad una buona velocità di risposta alle variazioni della sollecitazione;
pertanto vengono inseriti soprattutto nei sistemi in cui le variazioni di carico av-
vengono lentamente: infatti cambiamenti improvvisi di carico possono portare
il sistema verso l’instabilità, quando il coeffciente KI dell’azione integrale non
è scelto in modo opportuno. In ambito industriale oltre il 90% dei controllori
sono di questo tipo.
• Configurazione PD : per le sue caratteristiche il regolatore PD tende ad
anticipare l’errore e pertanto può essere utilizzato nei sistemi in cui si hanno
improvvise variazioni di carico come in alcuni sistemi di controllo per servomo-
tori, oppure anche in sistemi che non presentano problemi di stabilità ma che,
invece, richiedono una buona velocità di risposta.
• Configurazione PID : è il controllore utilizzato in quei processi lenti, che non
hanno bisogno di risposte immediate alla sollecitazione, dove però la presenza
di oscillazioni crea problemi.14 CAPITOLO 1. INTRODUZIONE AI CONTROLLORI PID
Da notare come i controllori ID o D non vengano menzionati, in quanto mai utiliz-
zati. Il primo a causa del fatto che tale regolatore presenta un’anti-risonanza ad una
determinata pulsazione, il secondo in quanto non in grado di controllare l’errore a
regime.
Le tre azioni viste finora, combinate assieme per formare la configurazione PID, dan-
no origine alla formula completa scritta in precedenza ma con degli accorgimenti
Z t
1 de(t)
u(t) = KP e(t) + · e(τ )dτ + TD ·
TI 0 dt
Passando alla rappresentazione tramite trasformate di Laplace delle equazioni del
PID otteniamo la successiva equazione dove U (s) ed E(s) sono le trasformate dei
segnali d’uscita e d’ingresso del PID
1
U (s) = KP 1 + + s · TD · E(s)
TI · sCapitolo 2
Tecniche ”anti wind-up”
Gli attuatori utilizzati nei sistemi di controllo hanno dei vincoli sull’ampiezza delle
uscite, che non possono superare dei valori massimi e minimi. Quando si utilizza
un regolatore con azione integrale, è possibile che l’uscita del controllore raggiunga i
suddetti limiti; in tal caso l’azione dell’attuatore non può crescere, anche se l’errore
di regolazione e(t) non è nullo.
La situazione reale che spesso si incontra è quella riportata in Figura 2.1 (attuatore
in saturazione), in cui:
Il fenomeno del wind-up
In presenza di saturazione, come detto in precedenza, può verificarsi che l’uscita del-
l’attuatore non cresca, pur rimanendo l’errore di regolazione e(t) non nullo. Conse-
guentemente, il termine integrale continua a crescere, ma tale incremento non produce
alcun effetto sulla variabile di comando dell’impianto. Tale situazione, oltre a non far
1516 CAPITOLO 2. TECNICHE ”ANTI WIND-UP”
Figura 2.1: Schema in cui l’attuatore presenta una saturazione.
funzionare correttamente il regolatore, rende inattivo il regolatore anche quando l’er-
rore diminuisce o si inverte di segno; infatti, il sistema di regolazione può riattivarsi
solo allorquando il segnale u(t) rientra nella zona di linearità della caratteristica del-
l’attuatore (scarica del termine integrale). Questo fenomeno si chiama comunemente
carica integrale o integral wind-up.
2.1 Desaturazione dell’azione integrale
Sia data la seguente funzione di trasferimento:
4
G(s) =
s+2
Ipotizziamo di utilizzare un controllore integrale con KI =1.
Supponiamo adesso che l’attuatore presenti una saturazione con UM =0.53. I risultati
della simulazione per un ingresso a gradino sono mostrati in Figura 2.2.2.1. DESATURAZIONE DELL’AZIONE INTEGRALE 17 Figura 2.2: (a) Risposta di un sistema in assenza (—) e in presenza (- -) di sa- turazione.(b) Andamento dei segnali e(t) (—),u(t)(- -) ed m(t) (-.) in presenza di saturazione. Schema di desaturazione Il problema del wind-up può essere evitato interrompendo l’azione integrale non ap- pena l’uscita del controllore raggiunge il livello di saturazione dell’attuatore. Una possibile soluzione è riportata in Figura 2.3 Figura 2.3: Schema di realizzazione di un controllore PID con dispositivo anti wind-up
18 CAPITOLO 2. TECNICHE ”ANTI WIND-UP”
Supponiamo che il controllore PID che deve essere realizzato sia della forma generale
NR (s)
RP ID (s) = , con DR (0) = 0,
DR (s)
in cui la condizione DR (0) = 0 implica la presenza di un blocco integrale nel con-
trollore. Supponiamo che sia NR (0) > 0. Allora, riferendosi allo schema riportanto
in Figura 2.3, si sceglie il polinomio Γ(s) in modo tale che la funzione di trasferimento
Γ(s) − DR (s)
Ψ(s) :=
Γ(s)
sia bibo-stabile, strettamente propria e con guadagno unitario (Ψ(0) = 1).
Si può allora osservare che:
• Se l’attuatore opera in regione di linearità, la funzione di trasferimento fra e(t)
e m(t) coincide con la RP ID (s) desiderata.
Dimostrazione
Q(s) = E(s) · RP ID (s)
U (s) = Q(s) + M (s) · Ψ(s) , ma siccome l’attuatore non è in saturazione
U (s) = M (s) , quindi Q(s) = M (s) · (1 − Ψ(s)).
Concludendo,la f.d.t. tra M (s) e E(s) risulta:
M (s) NR (s) NR (s) NR (s)
= = Γ(s)−D (s)
=
E(s) Γ(s) · (1 − Ψ(s)) Γ(s) − Γ(s) · R DR (s)
Γ(s)
che risulta essere esattamente la f.d.t del controllore.2.1. DESATURAZIONE DELL’AZIONE INTEGRALE 19
• Se il segnale errore e(t) permane dello stesso segno per un tempo elevato, allora
anche q(t), in funzione della dinamica di Γ(s), assumerà lo stesso segno;
m(t) satura al valore massimo UM dell’attuatore. Dato che Ψ(0) = 1, an-
che z(t) si assesterà al valore UM , sempre con una dinamica che dipende da
Γ(s). Se e(t) cambia di segno, anche q(t) cambia segno e quindi il segnale
u(t) = q(t) + z(t) scende subito sotto il valore di saturazione UM , attivando
il comportamento lineare dell’attuatore. Le prestazioni del sistema di desatu-
razione dipendono dalla scelta del polinomio Γ(s), che costituisce il nucleo del
progetto del desaturatore.
8
Assumendo Γ(s) = s + 8 =⇒ Ψ(s) = s+8
la risposa del sistema al gradino è rappresentata in Figura 2.4.
Figura 2.4: Risposta del sistema senza saturazione(—), con saturazione (- -) e con
saturazione e anti wind-up (-.)20 CAPITOLO 2. TECNICHE ”ANTI WIND-UP”
2.2 Ricalcolo del termine integrale
Una seconda tecnica anti wind-up introduce un termine es (t) = v(t) − u(t) che viene
riportato all’ingresso del blocco integrale e sottratto al valore dell’errore e(t).
Questo segnale viene generato prendendo il valore della grandezza di interesse mi-
surata all’uscita dell’attuatore e confrontandolo con il valore che la stessa grandezza
presenta all’ingresso.
Cosı̀ facendo si otterrà un valore nullo (che quindi non influirà in alcun modo nel
controllo) nel caso in cui l’attuatore stia lavorando entro i limiti di saturazione, men-
tre quando questi limiti verranno superati si genererà un valore che aiuterà a smorzare
la salita del termine integrale.
Figura 2.5: Schema di principio per la costruzione della variabile di attuazione.
Da questo schema si nota inoltre come sia possibile inserire prima del ritorno del
segnale di compensazione al blocco integratore, un altro blocco chiamato dispositivo
di antisaturazione, la cui funzione di trasferimento è solitamente pari a 1/TA (mo-
tivata dal fatto che il termine di compensazione andrà poi in ingresso ad un blocco
integratore) e il cui valore controlla la velocità dell’azione di desaturazione.2.2. RICALCOLO DEL TERMINE INTEGRALE 21
Infatti, in presenza di valori della costante di tempo TA ridotti, si avrà un azione
di desaturazione più rapida ma molto più facilmente soggetta a disturbi; in caso con-
trario invece, se il valore assegnato alla costante di tempo risulterà elevato, l’azione
di desaturazione sarà meno influenzata da disturbi ma anche più lenta.
Come nel caso precedente facciamo riferimento allo stesso sistema da controllare ma
utilizzando un controllore PI.
4 5
G(s) = , RP I = 1 +
s+2 s
Figura 2.6: Schema di desaturazione realizzato con Simulink.22 CAPITOLO 2. TECNICHE ”ANTI WIND-UP”
Il sistema in ingresso presenta una segnale ”tagliato” in quanto l’attuatore è in
saturazione, Figura 2.7.
Figura 2.7:
In uscita analizziamo i due casi,con sistema anti wind-up e non. Nel primo notiamo
come l’uscita va regime con un tenpo elevato rispetto la seconda,dovuta al fatto che
il termine integrale ci mette più tempo a scaricarsi, Figura 2.8.
Figura 2.8:2.3. IMC (INTERNAL MODEL CONTROL) 23
2.3 IMC (internal model control)
Un’altra tecnica per eliminare il problema del wind-up, è la cosiddetta tecnica IMC
il cui acronimo significa:
• Internal: il modello del sistema è interno al controllore;
• Model: è infatti richiesto un modello del processo da controllare;
• Control: il controllore usa il modello per migliorare le prestazioni.
Essa basa il suo funzionamento sull’ipotesi di conoscere il processo che dobbiamo
controllare, in modo da poterne ottenere una copia e integrarla nel controllore, come
illustrato in Figura 2.9.
Figura 2.9:
In questa Figura si è definita R(s) la funzione di trasferimento del sistema controllato
e R̃(s) quella della copia del sistema.
Il principio di funzionamento di questa tecnica viene descritto matematicamente di
seguito:
per prima cosa si calcola l’errore e=r−s −→ e = r − [y + R̃ · (v − u)]
e = r − Ru − R̃v + R̃u24 CAPITOLO 2. TECNICHE ”ANTI WIND-UP”
considerando poi che all’inizio si è imposto che la copia del sistema controllato rispec-
chiasse esattamente il sistema originale si può dire che
R = R̃
e dunque la formula si riduce a
e = r − Rv
di conseguenza adottando questa soluzione, e quindi costruendo un controllore che
abbia al suo interno una copia del sistema, il tutto si può ricondurre a uno schema di
questo tipo
nel quale l’elemento non lineare è stato spostato al di fuori dall’anello di controllo.Conclusione
Abbiamo dunque visto come attraverso dei semplici e convenienti schemi funzionali si
può risolvere il problema del wind-up, migliorando la risposta del sistema a tal punto
da essere superiore a quello in funzionamento linerare.
25Bibliografia
1. G. Marro, ”Controlli automatici”, V edizione, Zanichelli Editore, Bologna.
2. Bolzern, Scattolini, Schiavoni, Fondamenti di controlli automatici, Mc Graw-Hill,
2008
26Puoi anche leggere