STUDIO DEL COMPORTAMENTO A FATICA DI UN NUOVO SISTEMA DI FISSAGGIO DEL LEGAMENTO CROCIATO - Argotech
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

AIAS – ASSOCIAZIONE ITALIANA PER L’ANALISI DELLE SOLLECITAZIONI
XXXVII CONVEGNO NAZIONALE, 10-13 SETTEMBRE 2008, UNIVERSITÀ DI ROMA “LA SAPIENZA”
STUDIO DEL COMPORTAMENTO A FATICA DI UN NUOVO SISTEMA DI FISSAGGIO
DEL LEGAMENTO CROCIATO
M. Rossia, L. Ominib
a
Università Politecnica delle Marche, Dipartimento di Meccanica,
via Brecce Bianche – 60131 Ancona, e-mail: m.rossi@univpm.it
b
Medico Veterinario Libero Professionista, Clinica Veterinaria Dott. Luca Omini,
Chiaravalle – 60033 Ancona, e-mail: lucaom@libero.it
Sommario
Nel presente lavoro un nuovo sistema di fissaggio del legamento crociato artificiale nei cani viene
studiato da un punto di vista meccanico. Per prima cosa è stato fatto uno studio del funzionamento
cinematico e dinamico della gamba del cane e in particolare dell’articolazione del ginocchi al fine di
determinare le forze massime agenti sul legamento. Successivamente sono state effettuate delle prove
di caratterizzazione del materiale osseo su cui viene fissato il sistema al fine di valutare, tramite
opportuni modelli FEM il livello di tensione che si verifica nel materiale. Infine è stato realizzato un
apparato sperimentale in grado di riprodurre le condizioni di sollecitazioni del legamento crociato e
sono state fatte prove di fatica direttamente su una tibia su cui è stato impiantato il dispositivo. I test
hanno mostrato una buona tenuta meccanica del nuovo sistema che sembra essere confermata anche da
test clinici.
Abstract
In this work, a novel technique for the fixation of the artificial cruciate ligament in dogs is studied
under a mechanical point of view. An analysis of the kinematic behavior of the dog’s leg was
developed in order to evaluate the maximum loads acting on the ligament, the analysis focused on the
stifle joint. An experimental campaign was performed to characterize the mechanical behavior of the
trabecular bone tissue, then FE models were used to assess the stress field of the tissue near the
implant. Besides an experimental apparatus able to perform fatigue tests directly on the component
was built. The mechanical tests showed a good response of the technique developed, this result seems
to be confirmed by clinical tests.
Parole chiave: legamento crociato, fatica, materiali biologici.
1. INTRODUZIONE
La rottura del legamento crociato nel cane è la causa più comune di zoppia dell’arto posteriore in
questa specie, e si riscontra con una frequenza maggiore in razze di taglia grande (Labrador,
Rottweiler, Pastore Tedesco, Boxer, ecc).
Da un punto di vista eziopatogenetico nel cane, a differenza di quanto avviene nell’uomo, è difficile
che questa patologia sia la conseguenza di un trauma acuto, ma più facilmente deriva da una lenta
degenerazione del legamento fino al punto in cui una sollecitazione meccanica considerata fisiologica
è in grado di provocarne la rottura. Le cause della degenerazione sono ancora motivo di dibattito, ma
XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008 artrosi primaria, patologie autoimmuni ed alterazioni nella geometria dei segmenti ossei rientrano tra i motivi principali. Negli anni ’80 Slocum [1] indicò una nuova direzione grazie ai suoi studi sulla geometria del plateau tibiale; nel cane questo ha una inclinazione media di circa 25° (nell’uomo 5-7°) e secondo la teoria del piano inclinato, le forze di reazione che si generano a livello dell’asse tibiale vengono scomposte dal plateau tibiale in due componenti, di cui una con direzione craniale di intensità tanto maggiore quanto maggiore è l’inclinazione del piano. Questa spinta craniale è neutralizzata dal legamento crociato craniale e dall’azione dei muscoli posteriori della coscia ed esaltata dall’azione del muscolo quadricipite femorale. Secondo Slocum, un’eccessiva inclinazione del piatto tibiale o uno sbilanciamento nell’azione dei muscoli provocano un carico anomalo a livello del legamento crociato craniale e la sua conseguente degenerazione che esita nella rottura. Le tecniche chirurgiche utilizzate per trattare questa patologia si dividono in intracapsulari ed extracapsulari: le prime prevedono l’utilizzo di una stringa di tessuto connettivo (in genere una porzione di fascia lata o di tendine tibio-rotuleo) da inserire all’interno dell’articolazione (da qui l’appellativo intracapsulare) così da mimare il legamento originale, mentre le seconde utilizzano in genere fili di nylon di grosso diametro fissati attraverso fori praticati nella spina tibiale ed ancorati nel tessuto connettivo denso a livello della fabella laterale. Tutte le tecniche descritte fino ad oggi hanno come punto debole la limitata resistenza meccanica a livello dei punti di ancoraggio o del materiale utilizzato (nylon), tanto che dopo le prime settimane gran parte della stabilità articolare è data dalla fibrosi della capsula articolare. Verso la metà degli anni novanta Slocum mise a punto una tecnica denominata TPLO (Tibial Plateau Leveling Osteotomy) tramite la quale, attraverso una osteotomia radiale della metafisi tibiale, si modifica la geometria del plateau tibiale riducendone l’inclinazione e rendendo quindi inutile l’azione del legamento crociato craniale ormai lesionato. Nel 2004 l’Università di Zurigo ha ulteriormente evoluto gli studi biomeccanici di Slocum mettendo a punto una tecnica denominata TTA (Tibial Tuberosity Advancement) il cui vantaggio è quello di essere meno invasiva della TPLO e, almeno sulla carta, altrettanto efficace. L’obbiettivo finale della chirurgia in caso di rottura del legamento crociato craniale è quello di ristabilire la corretta stabilità articolare così da fermare la progressione artrosica e permettere una deambulazione normale del soggetto, senza zoppia. Tutte le tecniche e le varianti delle stesse utilizzate fino ad oggi riportano percentuali di successo tra il 70 ed il 90%, con risultati migliori nei soggetti di piccola taglia, dove le forze in gioco sono minori. Nei soggetti di taglia maggiore si sono abbandonate quasi completamente le tecniche intracapsulari, concentrandosi invece su quelle extracapsulari e su TTA e TPLO; queste ultime (ed in particolare la TPLO che vanta una casistica maggiore) nonostante riportino percentuali di successo simili ad altre tecniche meno innovative, sono considerate lo stato dell’arte soprattutto nei soggetti di mole maggiore. La nuova tecnica messa a punto dagli autori rientra tra le procedure intracapsulari, le uniche che rispettano l’anatomia originale del ginocchio. Il legamento crociato craniale origina da due punti la cui distanza non varia durante l’escursione articolare: non rispettando questa isometria, un qualsiasi impianto, naturale o artificiale, è posto in una condizione di stress che lo porta ad essere stirato od allentato a seconda dell’escursione articolare e che alla lunga ne provoca il cedimento. D’altra parte le tecniche intracapsulari che cercano di rispettare l’isometria del legamento (ad esempio B-PT-B o l’utilizzo dei tendini dei muscoli posteriori della coscia che si utilizzano in campo umano) hanno come punto debole il fissaggio nell’osso, in particolare nella tibia, che in genere avviene con viti ad interferenza. Questo tipo di fissaggio, considerate le forze in gioco, porta ad uno stress eccessivo dell’interfaccia osso/filetto, a livello della quale i micromovimenti che si generano portano ad un riassorbimento del tessuto ed al cedimento dell’impianto. La tecnica elaborata dagli autori prevede l’utilizzo di due viti opportunamente modificate, una tibiale ed una femorale. Il punto critico, che è l’oggetto di studio di questo lavoro, è l’ancoraggio del legamento artificiale sulla tibia. In questo caso, invece di utilizzare viti ad interferenza, viene creato un foro cieco nella tibia nel punto in cui deve essere ancorato il legamento, il foro viene maschiato opportunamente e viene inserito un helicoil per creare un sede filettata su cui viene avvitata una vite speciale che ha un foro al suo interno in cui viene fissato il legamento artificiale (fibra intrecciata

XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
Vectran). La presenza dell’helicoil serve a permettere una più omogena distribuzione dei carichi ed
una migliore tenuta dell’impianto agli stress ciclici.
Da un punto di vista meccanico, il sistema può essere visto come un inserto filettato sottoposto ad un
carico di fatica, ed in questo modo verrà trattato di seguito. Lo scopo di questo lavoro è quello di
valutare sperimentalmente l’effettiva tenuta dell’impianto ai carichi cui viene sottoposto durante la
funzione.
2. ANALISI DELLE FORZE
Come prima cosa è stato fatto uno studio finalizzato a stabilire quali sono le forze agenti su un
legamento crociato di un cane di media-grossa taglia. Sotto il profilo biomeccanico, la gamba del cane
è un sistema piuttosto complesso che contiene numerose condizioni iperstatiche, non è facile quindi
stabilire quali sono le forze che si scambiano i vari elementi come muscoli ossa o legamenti durante la
camminata o la corsa.
Sperimentalmente, la cosa più semplice che si può fare è quella di misurare la forza applicata al piede
durante la camminata usando appositi tapis roulant opportunamente strumentati. Questo test,
conosciuto in letteratura come “force plate analysis”, ha fornito dei valori di picco di forza che
corrispondono all’ 80% del peso corporeo per camminata a bassa velocità e raddoppiano durante il
trotto [2]. Tale valore di forza è stato preso come punto di partenza per calcolare le forze che si
scambiano nell’articolazione del ginocchio.
Figura 1: schema delle forze nella gamba
Il modello della gamba utilizzato in questo lavoro è mostrato in Figura 1. Sono state fatte alcune
semplificazioni, innanzi tutto il sistema studiato è bidimensionale in quanto le forze possono essere
considerate tutte agenti sullo stesso piano, inoltre sono stati presi in considerazione soltanto quei
muscoli che entrano in funzione nella fase di appoggio del piede, che è quella in cui si sviluppa il
picco della reazione a terra. Lo studio dei muscoli che entrano in funzione durante la camminata può
essere fatto tramite elettromiografie che indicano l’attività dei vari muscoli. Da questi studi [3] è
emerso che i muscoli che si attivano sono la muscolatura posteriore della coscia (ossia il bicipite
femorale, il semimebranoso, il semitendinoso, il gracile e il sartorio), il quadricipite femorale e il
gastrocnemio. Sono tutti muscoli biarticolari: il gastrocnemio ha i punti di inserzione su femore e
calcaneo, mentre gli altri muscoli hanno i punti di inserzione a livello di bacino e di tibia.
XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
La gamba è stata schematizzata con tre corpi rigidi che rappresentano il femore, la tibia e il piede, su
cui sono attaccati i vari muscoli. Si è fatta l’ipotesi che la gamba rimanga bloccata nel momento della
massima sollecitazione, per questo il femore è stato considerato incastrato sull’anca. Le forze che si
scambiano i vari elementi sono state ottenute facendo un equilibrio statico, partendo dalla forza FT di
contatto con il terreno che, come è stato già detto, è l’unica che è possibile misurare sperimentalmente.
Il piede è costituito da numerose ossa ma può però essere considerato come un unico corpo rigido, in
quanto non si è interessati a conoscere le forze di interazione che si scambiano i vari componenti. Il
piede è unito alla tibia tramite l’articolazione del garretto schematizzata con una cerniera. Sul piede
agisce infine il muscolo gastrocnemio che tende a controbilanciare la spinta del terreno e si attacca al
femore.
Il muscolo gastrocnemio genera una forza di trazione diretta lungo la direzione del muscolo, che
risulta grossomodo parallela all’asse tibiale ed è quindi inclinata di un angolo β rispetto all’asse del
piede. Vincolato in questo modo, il piede può essere assimilato ad una trave appoggiata sollecitata
dalla forza di reazione a terra. Conoscendo quindi la FT le distanze H1 e H2 e gli angoli, la forza che
agisce sul garretto e la forza di trazione del muscolo gastrocnemio possono essere ricavate come
reazioni vincolari. Scomponendo la forza sul garretto FG secondo la direzione parallela e
perpendicolare rispetto all’asse della tibia si ottiene:
sin γ H 1
FGassiale = FT + cos(π − β − γ )
sin (π − β ) H 2 (1)
FG
perpendicolare = FT sin (π − β − γ )
L’angolo β rappresenta l’angolo di apertura del garretto mentre l’angolo γ rappresenta l’inclinazione
della forza di reazione FT tra piede e terreno rispetto all’asse del piede. Nella fase di appoggio, per cani
di grossa dimensione, β vale circa 140° mentre γ è più difficile da determinare. In questo lavoro è stato
impostato un valore di γ di 40°, in questo modo la reazione a terra è perpendicolare alla direzione
assiale della tibia e FGperpendicolare è uguale a zero. Si è scelta questa condizione in quanto è la più
penalizzante per la sollecitazione del legamento crociato dato che crea una maggiore forza di
compressione sulla tibia. Da notare che a causa della leva sfavorevole che si viene a creare, la forza di
reazione FGassiale , che tende a comprimere la tibia, avrà un valore notevolmente maggiore rispetto alla
forza di reazione a terra.
Figura 2: schema dell’articolazione del ginocchio
XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
L’articolazione del ginocchio, che rappresenta l’oggetto di studio del seguente lavoro è stata
rappresentata in Figura 2. Per determinare le forze in gioco si è proceduto in maniera simile a quanto
visto per il piede scrivendo le equazioni di equilibrio del corpo libero della tibia. Come mostrato in
figura, questa volta sono più numerose le forze in gioco di cui bisogna tenere conto.
Innanzi tutto ci sono le forze che provengono dal garretto che sono state calcolate precedentemente
con l’Equazione 1. Quindi ci sono le forze che si scambiano nel punto di contatto tra tibia e femore. In
questo caso va evidenziato che il plateau tibiale presenta un’inclinazione rispetto alla perpendicolare
all’asse della tibia, questo fa si che la reazione (RPT) abbia un’inclinazione di un angolo θ rispetto
all’asse della tibia, questa inclinazione tende a spingere in avanti la tibia e questa azione viene
contrastata dal legamento crociato anteriore e dai muscoli della coscia. Fattrito rappresenta la forza di
attrito che si genera a seguito dell’azione di compressione della tibia. È stato considerato un
coefficiente di attrito statico µ=0.05, considerando quanto presente in letteratura [4].
I muscoli posteriori della coscia si attaccano alla tibia in diversi punti, in particolare il bicipite
femorale, il semitendinoso, il gracile e il sartorio si attaccano nella parte anteriore della tibia mentre il
semimembranoso si attacca nella parte posteriore. La retta di azione di questi muscoli è stata
approssimata considerandola allineata alla direzione assiale del femore, per questo è stato usato un
unico vettore che rappresenta l’azione di tutti i muscoli posteriori della coscia (FMP). Per quanto
riguarda il quadricipite femorale (FQF), la forza viene esercitata parallelamente all’asse della tibia.
Infine, il legamento crociato anteriore (LCA) può esercitare una forza di trazione inclinata di un
angolo φ rispetto alla perpendicolare all’asse tibiale.
A questo punto, conoscendo le forze e i punti di applicazione, è possibile scrivere le tre condizioni di
equilibrio della tibia. È stato impostato l’equilibrio alla traslazione in direzione assiale e
perpendicolare all’asse della tibia, inoltre è stato scritto l’equilibrio dei momenti scegliendo come polo
il punto di contatto tra tibia e femore. Si ottengono tre equazioni:
LCA cos ϕ − RPT sin θ + FATT cos θ + FRT + FMG cos(α − π / 2) = 0
LCA sin ϕ − RPT cos θ − FATT sin θ + FQF + FMG sin (α − π / 2) + FAT = 0 (2)
LCA ⋅ B1 + FQF ⋅ B2 − FMG ⋅ B3 − FRT ⋅ LTIBIA = 0
I bracci B1 B2 e B3 delle forze utilizzati nell’equilibrio dei momenti sono mostrati in Figura 2,
ovviamente il braccio della forza perpendicolare all’asse (FGperpendicolare) esercitata nel garretto è la
lunghezza della tibia stessa. L’angolo α rappresenta l’apertura del ginocchio e, in fase di appoggio,
può essere considerato pari a circa 110°. Il sistema non ammette un'unica soluzione, infatti ci sono
quattro incognite da determinare: LCA, RPT FQF e FMP. Per risolverlo è necessario stimare in qualche
modo la forza esercitata dai muscoli. Da elettromiografie è stato visto che, in fase di appoggio, tutti i
muscoli posteriori della coscia vengono contratti, conoscendo la sezione dei vari muscoli è possibile
fare una stima della forza di trazione esercitata. Da studi di fisiologia [5], si evince che la forza che è
un muscolo è in grado di esprimere dipende dalla superficie della sezione trasversale ed è un valore
compreso tra 1 e 2 kg per centimetro quadrato.
Con questa impostazione teorica sono state calcolate le sollecitazioni agenti sul legamento crociato in
tre soggetti. I parametri geometrici per i vari animali sono stati misurati sulle radiografie e riassunti in
Tabella 1, i valori delle forze calcolate sono riportati in Tabella 2. Per quanto riguarda la forza
esercitata dai muscoli posteriori della coscia (FMP), nei soggetti studiati, la misura dei muscoli
posteriori della coscia è simile, con una superficie di 35±5 cm2 che dà una forza complessiva di
515±73 N considerando una forza di 1.5 kg per centimetro quadrato.
Tabella 1: caratteristiche geometriche
Razza Età Peso H1 H2 B1 B2 B3 θ φ
[anni] [Kg] [mm] [mm] [mm] [mm] [mm]
Pastore tedesco 5 36 39 137 4 34 21 20° 24°
Boxer 7 34 33 125 4 32 20 20° 20°
Meticcio 7 32 40 138 5 35 24 18° 18°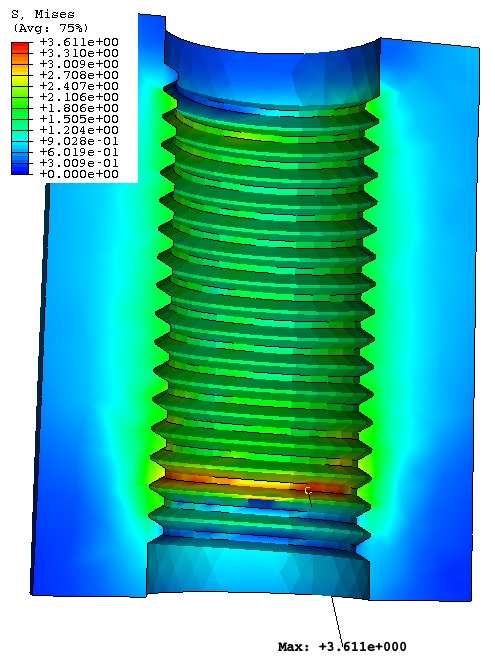
XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
Tabella 2: forze scambiate
Razza FT FGperpendicolare RPT FMP FQF LCA
[N] [N] [N] [N] [N]
Pastore tedesco 565 2549 3350 515 253 551
Boxer 534 2555 3310 515 256 524
Meticcio 503 2235 2910 515 312 291
La forza FT è stata calcolata al trotto considerando una spinta pari a 1.6 volte il peso corporeo. Dai
calcoli, emerge che per tutti per i primi due soggetti il carico è superiore a 500 N mentre nel meticcio,
dove l’inclinazione del plateau tibiale è minore di 2° la forza non arriva a 300 N. I calcoli sono
ovviamente approssimati ma danno una stima sufficientemente precisa del livello di sollecitazione cui
è sottoposto il legamento nei momenti di massimo sforzo. È stato scelto un valore di 500 N come
valore di prova per verificare la tenuta dell’impianto. È interessante notare che il carico di rottura del
legamento crociato è in genere intorno agli 800 N per un cane di 30 kg.
3. CARATTERIZZAZIONE DEL MATERIALE
La vite dell’impianto viene fissata sul tessuto osseo spongioso, che è il materiale di cui è composta la
parte interna dell’osso e si distingue dal tessuto osseo corticale che ne costituisce invece il
rivestimento. Il tessuto spongioso può essere visto come un materiale composito, infatti è formato da
una serie di trabecole ossee, che costituiscono la struttura portante, e da una serie di vuoti su cui è
presente tessuto molle. Esiste una vasta letteratura sul comportamento meccanico del tessuto
spongioso [6-8] anche se si conosce ancora poco dei meccanismi di danneggiamento. Per i nostri scopi
non interessa studiare il comportamento locale delle singole trabecole, ma è sufficiente considerare il
comportamento globale del tessuto considerando un materiale omogeneo equivalente.
Per studiare il comportamento elastico del materiale sono state effettuate una serie di prove di
compressione. I provini sono stati ricavati da tibie di tre soggetti di età compresa tra 3 e 10 anni e peso
compreso tra 10 e 30 kg. Le dimensioni del provino sono ovviamente limitate dalla grandezza
dell’osso, infatti la zona della tibia in cui è presente tessuto spongioso varia in funzione dell’animale,
ma in genere è compresa in un’area di pochi centimetri. I provini ricavati sono dei cilindri con un
diametro di circa 11 mm ed un’altezza variabile tra 5-9 mm, vedi Figura 3.
Figura 3: provini
I provini, dopo essere stati prelevati dall’osso, sono stati sagomati usando una fresa e le facce sono
state spianate per garantire una adeguata planarità, sono quindi stati congelati per preservare le
caratteristiche meccaniche.
Le prove di compressione sono state effettuate usando una macchina di trazione elettromeccanica
Zwick-Roell dotata di un estensimetro meccanico ad elevata sensibilità.
Il sistema di prova utilizzato è mostrato in Figura 4: a causa delle ridotte dimensioni del provino, non è
stato possibile misurare direttamente la deformazione su di esso ma sono stati usati, come estensioni,
due cilindri di acciaio su cui il provino viene appoggiato. Lo spostamento è stato misurato con
l’estensimetro meccanico sui cilindri di acciaio. Poiché i cilindri, rispetto al provino in osso, possono
essere considerati infinitamente rigidi, lo spostamento misurato dall’estensimetro rappresenta lo
spostamento che subiscono le due facce del provino.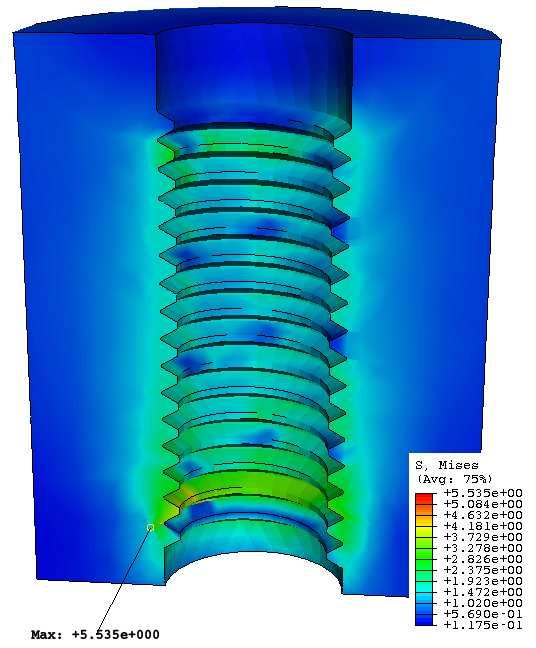
XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
Le superfici di contatto tra acciaio e provino sono state opportunamente lubrificate per evitare l’effetto
dell’attrito. La temperatura misurata nella stanza durante la prova era di 26 °C.
Cilindri di
Cella di carico
sostegno
Estensimetro
meccanico
Provino
Afferraggio
Figura 4: sistema di prova
Per prima cosa sono state effettuate delle prove di compressione semplice su provini tagliati lungo la
direzione sagittale, secondo l’orientazione delle trabecole, dove l’osso presenta le caratteristiche di
resistenza e rigidezza migliori. Dei tre provini, due sono stati ottenuti dallo stesso osso e presentano
caratteristiche simili. Un seconda prova è stata fatta effettuando su un provino una serie di carichi e
scarichi nel tratto elastico per determinare in modo più accurato il modulo di Young. I risultati delle
prove sono mostrati in Figura 5.
30 8
25 7
6
20
Tensione [MPa]
Tensione [MPa]
5
15
4
10
3
provino #1
5 2
provino #2
provino #3
0 1
0 0.05 0.1 0.15 0 0.005 0.01 0.015 0.02
Deformazione Deformazione
Figura 5: (a) prove di compressione e (b) prova ciclica
I valori misurati sono esposti in Tabella 3.
Tabella 3: Caratteristiche del tessuto osseo
Provini Modulo di Young Tensione di
snervamento
[MPa] [MPa]
#1 451 12
#2 420 15
#3 327 5
#4 carico 480* -
#4 scarico 519* -
*
valori mediatiXXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
La tensione di snervamento è stata ottenuta come deviazione dalla proporzionalità ed è un dato
piuttosto incerto, durante la compressione, infatti, successivamente allo snervamento il provino
subisce deformazioni permanenti ma non presenta rotture del tessuto. Nella prova ciclica, che presenta
un certo livello di isteresi, il modulo di Young è stato misurato nei tratti lineari del carico e dello
scarico ed è stata poi effettuata una media. Il valore di rigidezza misurato durante lo scarico è
maggiore rispetto a quello misurato durante il carico. Riassumendo, il modulo di Young equivalente
misurato si attesta tra 300 e 500 MPa, risultati simili si possono trovare in letteratura [7]. Nei modelli
numerici è stato utilizzato un valore medio di 400 MPa e un coefficiente di Poisson di 0.35. Analisi
più approfondite sono comunque necessarie per caratterizzare propriamente il comportamento del
tessuto spongioso, in particolare per determinarne l’anisotropia e l’effettivo carico di rottura; si intende
sviluppare questo argomento in successivi lavori.
4. MODELLI NUMERICI
È stato realizzato un modello agli elementi finiti dell’impianto con ABAQUS standard al fine di
verificare le tensioni che si esercitano nell’osso e l’effetto dell’helicoil sulla loro distribuzione. Per la
particolare geometria dell’helicoil che non consente di sfruttare simmetrie è stato necessario realizzare
un modello 3D completo dell’impianto, mettendo i tre componenti in contatto tra di loro. È stato
confrontato lo stato tensionale con o senza helicoil.
La vite è stata sollecitata con una forza di 500 N che agisce sul fondo della vite dove è attaccato il
tendine artificiale. Il modello e i risultati ottenuti sono mostrati in Figura 6.
helicoil madrevite di
vite tessuto
osseo
Figura 6: modello FEM dell’impianto: elementi utilizzati e risultati in termini di tensioni equivalenti
sulla madrevite, con o senza helicoilXXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
La figura mostra le tensioni osservate nella madrevite nei due casi. Qualitativamente si vede che
quando è presente l’helicoil (figura a sinistra) c’è una migliore distribuzione delle tensioni e la
tensione massima diminuisce di circa il 35% passando da 5.5 a 3.6 MPa. La presenza dell’helicoil
migliora quindi sensibilmente il comportamento dell’impianto. Il valore delle tensioni di von Mises, è
sempre inferiore alla carico di snervamento misurato sperimentalmente e quindi si può dire che il
materiale rimane in campo elastico e dovrebbe reggere senza problemi carichi statici di tale entità.
Non essendo però disponibili dati sul comportamento a fatica del tessuto spongioso ed essendo lo stato
tensionale piuttosto complesso, il modello FEM non è in grado di dare indicazioni sulla tenuta a fatica
dell’impianto, ma sono necessarie prove sperimentali sul componente assemblato.
5. PROVE SUL COMPONENTE
Per studiare la reale tenuta dell’impianto è stato sviluppato un sistema di prova che consente di
ricreare il più possibile le condizioni reali in cui opera il legamento crociato. È stata utilizzata una
macchina di trazione-compressione pneumatica che consente di fare prove cicliche a frequenze medio-
alte (oltre 10 Hz) con carichi fino a 2000 N.
Figura 7: prova meccanica sul componente
Il set-up sperimentale è mostrato in Figura 7, una attenzione particolare è stata prestata nella
realizzazione degli afferraggi che devono consentire di posizionare correttamente il sistema,
garantendo la giusta inclinazione del legamento artificiale rispetto all’asse della tibia, con un angolo φ
di circa 20°. Il sistema è costituito da due piastre laterali collegate da una piastra inferiore. Sulle
piastre laterali sono praticati due fori su cui passano dei perni che attraversano l’osso garantendo il
posizionamento corretto dell’asse. Per fissare l’osso ed evitare sollecitazioni di flessione è stata messa
una vite di appoggio che impedisce lo spostamento della testa della tibia durante la fase di trazione.
L’impianto con vite ed helicoil è stato fissato in modo del tutto simile a quello che avviene in vivo, il
tendine artificiale è stato collegato alla macchina di trazione. Sulla piastra inferiore è presente un’asola
su cui, tramite una opportuna vite di ancoraggio, la piastra viene fissata alla macchina di trazione che
dispone di un foro filettato su cui agganciare gli afferraggi. Grazie all’asola è possibile posizionare la
vite in modo tale che la direzione di tiro sia in asse con la vite come mostrato in figura.
In questa configurazione è stato imposto un carico ciclico variabile da 20 a 500 N, con una frequenza
di circa 10 Hz. Il cane da cui proveniva la tibia era un meticcio di pastore tedesco di circa 35 kg di
peso. La prova è stata interrotta dopo 13 giorni e 10˙717˙554 cicli che corrispondono a circa 6 anni di
vita del cane, considerando una intensa attività fisica di 2 ore al giorno in cui si verificano i massimi
livelli di carico (considerando un passo ogni 1.5 secondi). Non è stato riscontrato alcun cedimento
dell’impianto a parte un piccolo assestamento che si è verificato all’inizio, alla prima applicazione del
carico. Visto l’esito della prova si può concludere che la tenuta meccanica dell’impianto è sicuramente
garantita, anche perché, il cane, una volta operato, difficilmente caricherà l’arto con forze così elevate.XXXVII CONVEGNO NAZIONALE – ROMA, 10-13 SETTEMBRE 2008
5. CONCLUSIONI E RISCONTRI CLINICI
Un nuovo sistema di fissaggio del legamento crociato nei cani è stato studiato da un punto di vista
meccanico. Una volta determinate le forze cui è soggetto il legamento, sono state fatte prove
sperimentali per verificare la tenuta meccanica a fatica del materiale e lo stato di tensione dell’osso in
prossimità dell’inserto è stato studiato con analisi FEM. Da un punto di vista meccanico il sistema ha
mostrato una buona tenuta superando il numero di cicli richiesto e anche il livello di tensioni calcolato
appare sufficientemente basso.
Figura 8: (a) lastra post-operatoria, (b) lastra a sei mesi
Da un punto di vista clinico, i soggetti operati fino ad oggi mostrano risultati decisamente
incoraggianti, in particolare un rottweiler femmina di 30 kg di peso con rottura di entrambi i
legamenti crociati dell’arto posteriore sinistro e zoppia senza appoggio mostra, a distanza di sei mesi
dall’intervento, una ripresa ottima, con scomparsa quasi totale di zoppia, nessuna reazione
infiammatoria articolare e perfetta tenuta dell’impianto, come mostrato in Figura 8.
BIBLIOGRAFIA
[1] B. Slocum, T. Devine, “Cranial tibial thrust: a primary force in the canine stifle”, Journal of the
American Veterinary Medical Association, 183, 456-459, 1983
[2] D. M. Nunamaker, P. D. Blauner, “Normal and abnormal gait”, In: Textbook of small animal
orthopaedics. Ed. C.D. Newton and D.M. Nunamaker, J.B. Lippincott Company, Capitolo 91,
1985.
[3] J. W. Hermanson, H. E. Evans, “The muscular system”, In: Miller’s anatomy of the dog. Ed. H.E.
Evans, 349-381, 1993.
[4] T. A. Schmidt, R. L. Sah, “Effect of synovial fluid on boundary lubrication of articular cartilage”,
OsteoArthritis and Cartilage 15, 35-47, 2007.
[5] E. Camino, “L’attività muscolare volontaria e involontaria”, In: Fisiologia degli animali
domestici con elementi di etologia, Ed G.Aguggini, V. Bechelli, L.F. Giulio, Capitolo 3, 1992
[6] H. H. Bayraktar, E.F. Morgan, G.L. Niebur, G.E. Morris, E.K. Wong, T.M. Keaveny
“Comparison of the elastic and yield properties of human femoral trabecular and cortical bone
tissue, Journal of Biomechanics, 37, 27-35, 2004.
[7] Z. Miller, M.B. Fuchs, M. Arcan, “Trabecular bone adaptation with an orthotropic material
model”, Journal of Biomechanics, 35, 247-256, 2002.
[8] k. Choi, S. A. Goldstein, “A comparison of the fatigue behavior of human travecular and cortical
bone tissue”, Journal of Biomechanics, 25, 1371-1381, 1992Puoi anche leggere

















































