ROBOCUP JR ITALIA 2015 - Rete di scuole per la ROBOCUP JR ITALIA - Istituto Degasperi
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Rete di scuole per la
ROBOCUP JR ITALIA
ROBOCUP JR
ITALIA 2015
MALPENSA FIERE (VA), 8-11 aprile
REPORT DI DOCUMENTAZIONE
Squadra ............................... ULISSE
Istituto .............. ALCIDE DEGASPERI
Classe ........................... 4ASA-4ALS
Gara ......................... RESCUE MAZE
UNDER 19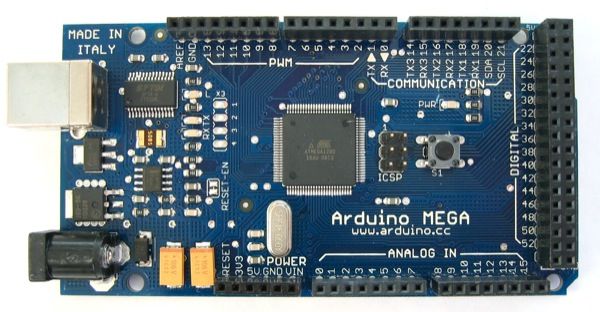
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Indice
Premessa ............................................................................................3
1. Dati generali ...................................................................................5
2. Contesto e motivazione ..................................................................6
3. Nome e struttura del robot ......................................................... 10
4. Meccanica.................................................................................... 20
5. Unità di controllo ......................................................................... 26
6. Sorgente di alimentazione ........................................................... 30
7. Sensori ......................................................................................... 31
8. Attuatori ...................................................................................... 37
9. Ambiente di sviluppo ................................................................... 39
10. Software di controllo ................................................................. 41
Appendice 1. Elementi di ispirazione .............................................. 47
-----------------------------------------
This project has received funding from the European Union’s
Horizon 2020 research and innovation programme
under grant agreement No 644344.
Per informazioni sul progetto, http://www.didiy.eu
I.S.”Degasperi”
2
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Premessa
La “Rete di scuole per la Robocup Jr ITALIA” è espressione
dell’Autonomia scolastica regolata dal D.P.R. 275/99 (art. 7),
che permette alle scuole statali di operare sinergicamente per
obiettivi condivisi e ritenuti importanti per l’offerta formativa
erogata all’utenza.
La Rete di scuole è nata sulla condivisione di una serie di prin-
cipi EDUCATIVI e DIDATTICI riferiti alla realtà della scuola ita-
liana. Questi principi e le conseguenti proposte operative
erano stati riportati in un documento del maggio 2008 dal ti-
tolo: Manifesto per una RoboCupJr italiana - una proposta
per la diffusione dell’utilizzo didattico della Robotica nelle
scuole a cura di Andrea Bonarini, Augusto Chioccariello e Gio-
vanni Marcianò.
L’obiettivo della Rete – organizzare l’edizione italiana della
Robocup Jr – concretizza una spinta al confronto e alla colla-
borazione tra Istituti scolastici, elementi che motivano docen-
ti e studenti all’impegno nell’innovazione, sia didattica che
tecnologica, affrontando i problemi che costituiscono uno
standard internazionale dal 2000, quando la Robocup (mani-
festazione riservata alle Università di tutto il mondo) ha pro-
posto le tre “gare” per la scuola: Dance – Rescue – Soccer.
La Robocup Jr ITALIA è una manifestazione nazionale fondata
di tre punti qualificanti:
1. una struttura che cura l’organizzazione e gestisce gli aspetti
di organizzazione, promozione, svolgimento ai diversi livelli,
regionali e nazionali;
2. un contenuto condiviso, ovvero regolamenti, formule di
gara, supporto formativo e informativo ai partecipanti;
I.S.”Degasperi”
3
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
3. una documentazione delle proposte didattiche e del lavoro
degli studenti che coinvolgono l’uso di kit o robot auto-
costruiti per la partecipazione agli eventi organizzati dalla Re-
te. Questo volumetto appartiene alla collana di documenta-
zione.
Sul piano organizzativo e gestionale della Rete di scuole lo
Statuto prevede organismi ben distinti ma fortemente inte-
grati:
COMITATO DI GESTIONE – formato dai Dirigenti scolastici de-
gli Istituti fondatori o associati alla Rete. Si riunisce due volte
l’anno in via ordinaria, e online per decisioni straordinarie.
ISTITUTO CAPOFILA – come previsto dal DPR 275/99, cura gli
aspetti burocratici, amministrativi e contabili della Rete. Il Di-
rigente scolastico dell’Istituto capofila è il legale rappresen-
tante della Rete e provvede a dare esecuzione alle delibere
del Comitato di Gestione.
COMITATO TECNICO – formato dai docenti referenti degli
Istituti fondatori o associati alla Rete, provvede a definire il
Bando e i Regolamenti di gara per la manifestazione annuale
nazionale, trasmettendoli al Comitato di Gestione che li deve
approvare.
COMITATO LOCALE – cura l’edizione annuale della manifesta-
zione, ed è formato a cura dell’Istituto fondatore o associato
a cui il Comitato di Gestione ha assegnato la cura dell’evento.
ISTITUTI PARTECIPANTI – iscrivendosi alle gare, beneficiano
del supporto della Rete ma non partecipano alle decisioni ge-
stionali o tecniche. La partecipazione alla gara nazionale li
rende idonei per aderire alla Rete. Diversamente serve il pa-
rere del Comitato Tecnico.
I.S.”Degasperi”
4
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
1. Dati generali
Istituto
Tipologia Istituto Superiore
Nome Alcide Degasperi
Indirizzo Via XXIV Maggio
CAP 38051 Città Borgo Valsugana
Telefono 0461 753647 E-mail
Sito web http://www.istalcidedegasperi.it/website/
Docente referente
Nome Costantino Cognome Tomasi
Posizione Docente laboratorio di fisica
Telefono 328 0836868 E-mail costanti-
no.tomasi@istitutoade
gasperi.it
Squadra
Nome Cognome Età Classe Sesso
Dario Ferrai 18 4ASA M
Michel Moranduzzo 17 4ASA M
Daniela Avgustini 17 4ALS F
Alberto Sartori 17 4ALS M
Alberto Dietre 17 4ALS M
Matteo Marchesoni 18 4ALS M
Juri Dalvai 17 4ALS M
I.S.”Degasperi”
5
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
2. Contesto, motivazione e quadro organizzati-
vo
Negli ultimi anni l'istituto "A. Degasperi" di Borgo Valsugana
(TN), sotto la dirigenza del dott. Paolo Pendenza, ha rivolto
particolare attenzione alle esigenze dei giovani e della
comunità, confrontandosi con la realtà quotidiana e
guardando al futuro e all'innovazione, promuovendo nuove
idee in differenti ambiti tecnologici e umanistici. Tutto questo
trova un'ottima realizzazione nel campo della robotica e
precisamente con lo sviluppo del progetto "Robotica e
Roboetica" coordinato e ideato dal prof. Tomasi Costantino.
Gli studenti coinvolti sono: Daniela Avgustini, Matteo
Marchesoni, Alberto Dietre, Alberto Sartori e Juri Dalvai
della 4 LS, Dario Ferrai e Michael Moranduzzo della 4 ASA.
La proposta didattica vede l'interazione del mondo
umanistico con quello scientifico elaborando in forma
modulare argomenti riguardanti l'informatica, l'elettronica, la
meccanica, il design, la filosofia, la letteratura, l'etica e la
storia, tutti uniti da un filo conduttore che porterà alla
realizzazione di un progetto comune. I docenti che
collaborano, relativamente alla loro area disciplinare, sono
Bartolini, Casna, Dandrea, Romano, Zuin, Rapposelli. Il
supporto nelle attività laboratoriali è stato garantito dal
tecnico Quaiatto Walter e la collaborazione nella revisione del
report umanistico dalla prof.ssa Ropele.
Lo studente nella prima parte del corso svilupperà una certa
"empatia" verso un'area di interesse che approfondirà nella
seconda fase didattica per il raggiungimento dell'obiettivo
prefissato.
Gli alunni, per quest'anno scolastico, vedranno la
realizzazione di un robot per la partecipazione al concorso
I.S.”Degasperi”
6
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
nazionale di Robocupjr, competizione che da anni coinvolge
più di un centinaio di Istituti Superiori sul territorio nazionale.
Si è prestata molta attenzione alle tematiche umanistiche e
sociali che hanno particolare legame con l'area tecnologico-
scientifica nella società.
Un importante investimento è stato fatto dall'Istituto in
termini di strumentazione e materiale didattico, come per
esempio l'acquisto della stampante 3D e delle piattaforme
hardware di Arduino e Lego Mindstorm.
Nell’innovazione didattica, in questi ultimi tempi, sta
emergendo in modo chiaro, anche dalla letteratura
scientifica in materia e dalle prime ricognizioni promosse dal
MIUR, l’utilità delle stampanti 3D e della robotica nelle scuole
come strumenti che favorisce per esempio:
• la pratica di una didattica laboratoriale e
multidisciplinare;
• lo sviluppo e l'interazione di competenze su più aree
disciplinari
• l’intelligenza spaziale, ovvero la capacità di
comprendere lo spazio tridimensionale;
• lo sviluppo dell'immaginazione;
• l’utilizzo avanzato di software specifici per disegni 3D;
L’Istituto si assume la responsabilità con tale progetto, ma
come normalmente dovrebbe essere, di ordinare e
interconnettere le conoscenze acquisite dagli studenti nelle
varie discipline mirando ad un approccio critico nei confronti
dei temi affrontati e sviluppando in ogni studente una
riflessione metacognitiva della fase di apprendimento. Lo
studente in tal modo potrà ampliare le proprie competenze in
modo autonomo attraverso le abilità fornitegli
dall'insegnante. Quest'ultima figura cambia il suo classico
I.S.”Degasperi”
7
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
ruolo di interlocutore trasmissivo e diventa mediatore
secondo il modello di Vygoskij, cioè l'insegnante diviene
sostenitore di un percorso formativo che va a collocarsi nella
zona di sviluppo prossimale dell'apprendimento.
La finalità ultima del progetto è quella di trasmettere alle
nuove generazioni conoscenze di tecnologie attuali e
competenze spendibili in ambiti innovativi, dando loro la
possibilità di inserirsi più facilmente in un mondo del lavoro,
soggetto sempre di più, a rapidi cambiamenti.
Il progetto si è sviluppato dal mese di novembre ad aprile.
L’area tecnico-scientifica ha visto la trattazione di argomenti
inerenti la programmazione della piattaforma NXT, Arduino e
Android; inoltre sono stati sviluppati concetti nell’ambito
elettronico.
Per l’argomentazione umanistica, il gruppo ha seguito le
lezioni tenute dagli insegnanti Cinzia Casna per i riferimenti in
letteratura, Nicola Zuin per filosofia e Enrico Dandrea per
quanto riguarda la cinematografia, design nella robotica e la
realizzazione del logo.
Le lezioni hanno avviato un’attività di riflessione e confronto
nell’ambito della roboetica. Sono stati analizzati testi di
diversi autori, sviluppando diversi temi: in particolare per
quanto riguarda la letteratura:
• Omero, Odissea ;
• Dante Alighieri, Divina Commedia;
• Ugo Foscolo, A Zacinto;
• Giovanni Pascoli, Poemi Conviviali, Il sonno di Odisseo;
• Primo Levi, Se questo è un uomo, Il canto di Ulisse;
Si è soffermata l’attenzione sul testo di Karel Čapek, Rossum's
Universal Robots, che è stato analizzato nel suo complesso.
Per quanto riguarda la parte filosofica si è discusso riguardo al
tema del progresso e dell'influenza della società
sull'individuo, prendendo spunto dall'Odissea e dal libro di
I.S.”Degasperi”
8
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Horkheimer e Adorno, Dialettica dell'Illuminismo, che offre
una lettura particolarmente interessante e pessimistica del
mito di Ulisse.
È stata interessante anche la visione di alcuni spezzoni di
pellicole cinematografiche che hanno permesso di cogliere
spunti significativi sull'interpretazione che hanno avuto i
robot:
• Metropolis:
• Il mondo dei robot;
• Star Wars;
• Terminator;
• Wall – E.
I.S.”Degasperi”
9
ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
3. Nome e struttura del robot
L’idea di Ulisse nasce da …
Era un giorno qualunque. Ulisse si svegliò per andare a scuola.
Si lavò, si vestì, fece colazione, e partì. Prese il treno delle 7:
11 e arrivò a scuola puntuale, come sempre. A scuola era at-
tento, come era solito fare: i professori parlavano attraverso
la lavagna elettronica e lui segnava e registrava tutto sul suo
tablet; finite le lezioni tornò a casa per svolgere i compiti, ma
spesso si distraeva con la console olografica.
La vita che conduceva Ulisse rientrava nella normalità, ma
qualcosa quel giorno era destinato a cambiare.
I.S.”Degasperi”
10ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
“Ulisse! Helena 1 è in carica, vai tu a prendermi in soffitta il
vestito bianco con i ricami dorati?”
“Quale? Quello che hai comprato l’anno scorso? Ok, ora ci
vado …”
Ulisse salì in soffitta; i raggi provenienti dalla finestra creava-
no fasci di luce nell'aria polverosa che riempiva l’ambiente.
Mentre rovistava nel grande baule in fondo alla stanza solle-
vando un nuvolone di polvere che lo fece starnutire, sentì con
la mano una superficie ruvida. Scorse una specie di coperchio
e rimuovendolo vide uno scatolone.
Incuriosito, lo aprì e trovò al suo interno degli strani oggetti
che aveva visto solo su immagini in Internet:
“Oh! Dei libri! Dei libri fatti con la carta, proprio come quelli di
un tempo.”
Stupito dall’eccezionalità della scoperta e incuriosito, comin-
ciò a sfogliarne uno.
“Vediamo un po'… Divina Commedia, Dante Alighieri, boh …
non mi dice proprio niente”.
Rigirando le pagine con attenzione notò un capitolo il cui tito-
lo lo sorprese: “Ma tu guarda, Il Canto di Ulisse...” e cominciò
a leggere:
“Considerate la vostra semenza:
fatti non foste a viver come bruti,
ma per seguir virtute e canoscenza” 2
Mentre era assorto nella lettura, la mamma lo chiamò. Lasciò
tutto come lo aveva trovato e scese con il vestito, ripromet-
tendosi di tornare presto.
1 Helena è la protagonista della tragedia di “Rossum’s Universal Robots”.
2 Dante, “Divina Commedia”, Canto XXVI, Inferno, vv. 118-120
I.S.”Degasperi”
11ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Durante tutto il giorno continuava a pensare a ciò che aveva
letto.
Chissà cosa voleva dire Dante con “seguire virtù e conoscen-
za”? Quale poteva essere il loro significato vero, profondo? E
perché Ulisse, suo omonimo, era recluso all'inferno?
Quella notte non dormì molto bene; il suo sonno era distur-
bato da quelle parole che ritornavano ossessivamente nella
sua mente e quando si alzò capì che in lui vi era qualcosa di
diverso, di nuovo.
Per la prima volta non vedeva l'ora di tornare da scuola per
andare in quella soffitta e continuare la lettura di quei libri.
Appena entrato in casa, sgattaiolò in soffitta, aprì la scatola,
estrasse un altro libro e intraprese la lettura, sperando che
fosse più comprensibile:
“L'illuminismo è l'uscita dell'uomo da uno stato di minorità il
quale è da imputare a lui stesso. Minorità è l'incapacità di ser-
virsi del proprio intelletto senza la guida di un altro.” 3
Conoscenza, intelletto, stato di minorità... Ulisse dovette leg-
gere il passo più e più volte per cominciare a capire quale fos-
se il suo significato.
Si concentrò sulle parole: “Guida di un altro”; cosa voleva dire
esattamente l’autore? Forse che il proprio pensiero venisse
influenzato da quello di un altro? Gli venne in mente lo spet-
tacolo di magia che aveva visto qualche giorno prima, in cui
un prestigiatore ipnotizzava delle persone e le obbligava a di-
re determinate frasi oppure a eseguire specifiche azioni.
Continuò a leggere:
3 Immanuel Kant, “Risposta alla domanda: che cos’è l’Illuminismo?”, 1784
I.S.”Degasperi”
12ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
“Imputabile a se stessi è questa minorità se la causa di essa
non dipende da difetto di intelligenza, ma dalla mancanza di
decisione e del coraggio di servirsi del proprio intelletto senza
esser guidati da un altro.” 4
Gli autori di tali opere lo stavano incitando a conoscere, a ser-
virsi della sua intelligenza, ma non capiva in che modo egli
dovesse farlo. Si era sempre ritenuto uno studente intelligen-
te come tutti i suoi compagni: ad esempio quando risolveva i
problemi brillantemente o otteneva ottimi risultati nei test a
scuola. Questa non è vera intelligenza, non sicuramente quel-
la cui si riferiva Kant nel “servirsi del proprio intelletto senza
esser guidati da un altro”, ma piuttosto una forma di appren-
dimento passiva. Questi autori contrariamente gli stavano
suggerendo un nuovo tipo di ingegno a lui finora sconosciuto.
Il messaggio di quelle poche righe celava dei contenuti molto
più profondi, dei quali non era ancora in grado di compren-
derne il significato. Qualcuno lo stava forse “ipnotizzando”
come quel prestigiatore? Ulisse utilizzava quotidianamente il
proprio intelletto, ad esempio a scuola: qui i suoi “ragiona-
menti” non erano autonomi bensì guidati dagli insegnanti. Ma
allora che tipo di problemi si doveva porre, quali domande? A
quali verità volevano condurlo questi testi?
Mentre si poneva queste domande, l'occhio scorse un altro
tomo, con al suo interno un segnalibro: aprendolo, trovò un
altro racconto il cui protagonista era sempre Ulisse:
“Son io! Son io, che torno per sapere!
Ché molto io vidi, come voi vedete me.
Sì; ma tutto ch’io guardai nel mondo,
i riguardò; mi domandò: Chi sono?” 5
4. Immanuel Kant, “Risposta alla domanda: che cos’è l’Illuminismo?”, 1784
5 Giovanni Pascoli, “L’ultimo viaggio, Il vero”, vv. 35 - 38
I.S.”Degasperi”
13ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Chi sono io? … che razza di domanda era quella? Lui era lui,
Ulisse ovviamente, e chi altri? O forse quello era solo il suo
nome … cosa intendeva quel tale, Giovanni Pascoli con questa
domanda nei suoi scritti?
Chi era lui veramente? Soltanto un nome, una semplice eti-
chetta? O c’era qualcos’altro oltre il semplice nome?
“Ulisse! Svegliati, devi andare a scuola!”
“Arrivo, mamma, dammi solo un minuto!”
Ulisse si alzò e andò in cucina, dove Helena gli servì la cola-
zione.
“Analizzando i tuoi indicatori bio – neurali trovo schemi di
stress e malessere psicologico. Ti senti bene, padrone?”
Il ragazzo osservò attentamente Helena; e i robot, invece, co-
sa erano? Anche loro erano entità pensanti, con intelligenza,
in grado di ragionare e di elaborare dati come gli esseri uma-
ni, ma in modo diverso, molto più limitato, probabilmente.
Incuriosito, cominciò ad investigare.
“Helena, il tuo cervello da robot come funziona, quali pensieri
ti corrono per la testa? … insomma tu come pensi?”
“Se mi stai chiedendo il mio sistema operativo, padrone, allo-
ra dovresti saperlo: è l’XCZ431, e l’ho aggiornato proprio ieri.”
“No, non è quello che volevo dire … come spiegarlo … quando
ragioni, fino a che limiti ti puoi spingere? Ci sono delle cose
che non puoi pensare, anche se ci provi?”
“Beh, padrone, io non potrei mai, per esempio, pensare di
nuocere in alcun modo ad un essere umano, perché va contro
le leggi che mi sono state imposte.”
“Parli delle tre leggi della robotica di Asimov?”
“Sì, proprio quelle:
«
1. Un robot non può recar danno a un essere umano né
può permettere che, a causa del proprio mancato intervento,
un essere umano riceva danno.
I.S.”Degasperi”
14ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
2. Un robot deve obbedire agli ordini impartiti dagli es-
seri umani, purché tali ordini non contravvengano alla Prima
Legge.
3. Un robot deve proteggere la propria esistenza, purché
questa autodifesa non contrasti con la Prima o con la Seconda
Legge. » ” 6
In effetti Ulisse non aveva mai pensato a quanto quelle regole
esprimessero la sottomissione dei robot agli uomini: egli la
riteneva scontata, non essendosi mai posto domande come
quelle. I robot non erano in grado di pensare con un proprio
ingegno, di testa propria, avevano bisogno di una guida.
Apparivano come quella persona ipnotizzata, in totale balia
del prestigiatore. Non erano programmati per porsi domande
e per elaborare un pensiero personale: erano in un certo sen-
so privi di un’identità propria, non avevano un obiettivo a cui
tendere, erano completamente soggiogati all’uomo.
Per la prima volta un dubbio si insinuò nella sua mente: quan-
ta differenza c’era fra lui e un robot? Quanto è sottile la linea
che separa uomo e macchina?
“Helena?”
“Sì, padrone?”
“Tu credi che la mia vita abbia un fine o che io sia semplice-
mente una pedina, una marionetta mossa da qualcuno? Sono
libero oppure sottomesso al volere di qualcun altro?”
“Come ben sai, le mie memorie non contengono la risposta a
questo tipo di domanda. Posso semplicemente limitarmi a di-
re che a differenza nostra non hai nessuno che ti imponga de-
gli ordini.”
“No, non era questo che intendevo … vabbè, grazie, Helena”.
6 Leggi di Asimov, Manuale di Robotica,
I.S.”Degasperi”
15ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Rimuginava su queste domande andando a scuola, e durante
la ricreazione decise di parlarne con i compagni, sperando di
ottenere delle risposte differenti.
“Ragazzi, voi vi siete mai chiesti per quale scopo siamo nati?”
I compagni lo guardarono con espressione attonita: “Che cosa
vuoi dire, scusa?”
“Voglio dire … cosa ci aspetta in futuro? Come dobbiamo vi-
vere la nostra vita? E quale deve essere lo scopo della nostra
esistenza?”
“Beh, non so cosa farai tu, però io da grande avrò un bel lavo-
ro, magari sarò un ricercatore e guadagnerò molti soldi … in-
somma, cercherò di trascorrere il mio futuro in tranquillità …
perché dovrei puntare a qualcos’altro?”
“Capisco … e per quanto riguarda l’uomo in generale? Come
sarà la società?”
“Sicuramente gli uomini del futuro saranno molto più fortu-
nati di noi.”
“E perché, scusa?”
“Beh, guarda a che ritmo si sta sviluppando il progresso tec-
nologico! Di questo passo si arriverà ad un punto in cui tutti
saranno felici e non dovranno più lavorare, perché faranno
tutti i lavori i robot.”
“Tutti saranno in grado di ottenere ciò di cui hanno bisogno:
non ci sarà più povertà. Sì, la gente sarà senza lavoro, ma solo
perché non ci saranno più lavori da fare: vivranno solo per mi-
gliorare se stessi.”
“Ma sarà davvero così?”
“Sarà così, non potrebbe essere altrimenti” 7
“Non capisco, come fate a dire che il progresso è l’unico
obiettivo che l’uomo deve porsi? Non potrebbe esistere un
7 Karel Čapek, “Rossum’s Universal Robots”
I.S.”Degasperi”
16ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
altro motivo, più significativo, che sta alla base della nostra
esistenza?”
“E che ne so, mica sono un filosofo!”
“Già, se tu fossi un filosofo non riusciresti nemmeno a procu-
rarti da mangiare!”
Ulisse si allontanò pensieroso. Aveva come l’impressione di
avere davanti a sé un muro insormontabile, che non sarebbe
caduto nemmeno con delle cannonate.
Ma anche lui aveva vissuto così fino a pochi giorni fa? Anche
lui dava tutto per scontato? Non riusciva a capire come pote-
va essere stato così ottuso e ingenuo fino ad allora.
“Mamma, posso tornare a casa a piedi?” disse Ulisse al tele-
fono.
“Cosa c’è, Ulisse, ti senti bene? “
“Sì … tutto bene” rispose Ulisse immerso nei suoi pensieri.
I suoi compagni parlavano come il suo robot: sembravano es-
sere ipnotizzati da qualcuno, come nel caso di quel prestigia-
tore. Ma molto probabilmente i suoi compagni non erano gli
unici a ragionare così. Girando per le strade, Ulisse aveva as-
sunto una nuova consapevolezza di ciò che lo circondava.
La gente correva di qua e di là, ma a che scopo? Tutto ciò che
gli stava attorno gli sembrava così insensato. Le persone at-
torno a sé sembravano tutte uguali: avevano tutti gli stessi
vestiti, gli stessi telefoni, lo stesso modo di fare. Passo dopo
passo la sua visione della società stava mutando: l’influenza
che essa esercitava nei confronti della gente colpiva sia
l’aspetto esteriore che quello interiore.
“ROBOT ROSSUM: IL PROGRESSO È QUI” 8
8 Karel Čapek, “Rossum’s Universal Robots”
I.S.”Degasperi”
17ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Questo era lo slogan pubblicitario apparso su un enorme
schermo sull’altro lato della strada, che scomparve subito la-
sciando il posto ad una pubblicità di elettrodomestici.
Progresso? Ah, giusto, era diventato quello lo scopo a pre-
scindere di ciascun essere umano. Con il passare dei secoli
l’uomo non si era reso conto di aver creato un sistema che
aveva finito per inghiottirlo, come un invisibile prestigiatore
che controllava le menti dei suoi collaboratori.
Tutto il resto al di fuori di ciò veniva posto in secondo piano,
ogni altro tipo di prospettiva veniva adombrata da questa
enorme e accecante sete di progresso; ma era a questo che
l’uomo si doveva limitare?
Le sue azioni dovevano essere tutte decise dalla società, da
questo sistema, questo ciclo privo di ogni limite? Nascere,
andare a scuola, crescere, trovare un lavoro e una moglie e
allevare la prole? Ogni giorno precipitarsi, correre di qua e di
là sforzandosi sempre di più di essere uguali agli altri?
Ma quale lo scopo di tutto questo? Cosa si otterrà alla fine,
quando l’uomo avrà già scoperto ogni cosa?
Esattamente come dei robot, le persone svolgevano le pro-
prie attività, lavoravano e si arrabattavano in continuazione,
senza il “coraggio di servirsi del proprio intelletto”: un chiaro
esempio di ciò era il suo insegnante di biotecnologie, il quale,
recitando sempre le solite battute e comportandosi sempre
alla stessa maniera appariva ai suoi occhi come un automa.
Passando accanto al monumento in onore di Turing, conside-
rato universalmente il padre della robotica, si ricordò come
secoli prima che lui nascesse i robot riuscirono a superare
l’Imitation Game, passando da semplici macchine comandate
dall’uomo a esseri senzienti in grado di confrontarsi con gli
esseri umani.
Da quel momento in poi l’industria della robotica non aveva
conosciuto più limiti: un momento! Se la tecnologia era arri-
vata a quei livelli era forse possibile che alcune persone, ma-
I.S.”Degasperi”
18ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
gari certi suoi conoscenti, o compagni di classe, fossero dei
robot estremamente complessi? A questo punto gli venne di
nuovo in mente la domanda che stava per porre ad Helena:
qual è la differenza tra uomo e robot? Era forse possibile che
delle persone a lui care fossero delle macchine e non uomini
in carne e ossa?
E lui poteva avere la certezza definitiva di essere un uomo? O
avrebbe potuto essere una macchina?
Arrivò a casa ansimando. Non poteva non trovare la risposta a
quella domanda; sentiva che quella soffitta doveva fornirgli
ciò che cercava.
Sfogliando le pagine con la fronte sudata, arrivò alle fatidiche
parole, e lì svanì ogni dubbio:
“«Solo mi resta un attimo. Vi prego!
Ditemi almeno chi sono io! chi ero!».
E tra i due scogli si spezzò la nave.” 9
9 Giovanni Pascoli, “L’ultimo viaggio, Il vero”, vv. 53 – 55.
I.S.”Degasperi”
19ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
4. Meccanica
Per quanto riguarda la meccanica ci si è occupati
principalmente dell’ottimizzazione del telaio che deve
garantire, per gli impieghi previsti, le seguenti caratteristiche
costruttive:
• Struttura resistente per garantire solidità e compattezza
al robot;
• Ingombro minimo per consentire la migliore
manovrabilità all’interno degli spazi assegnati;
• Peso bilanciato affinché il baricentro sia situato in una
posizione bassa e centrale;
• Essenzialità della struttura per consentire il facile
montaggio, accesso e utilizzo della sensoristica e dei
microcontrollori.
In particolare il telaio deve consentire un’ampia possibilità di
montaggio dei sensori senza limitarne il campo d’azione. Per
soddisfare queste esigenze, si è deciso di creare le
componenti del telaio attraverso una stampante 3D.
I.S.”Degasperi”
20ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
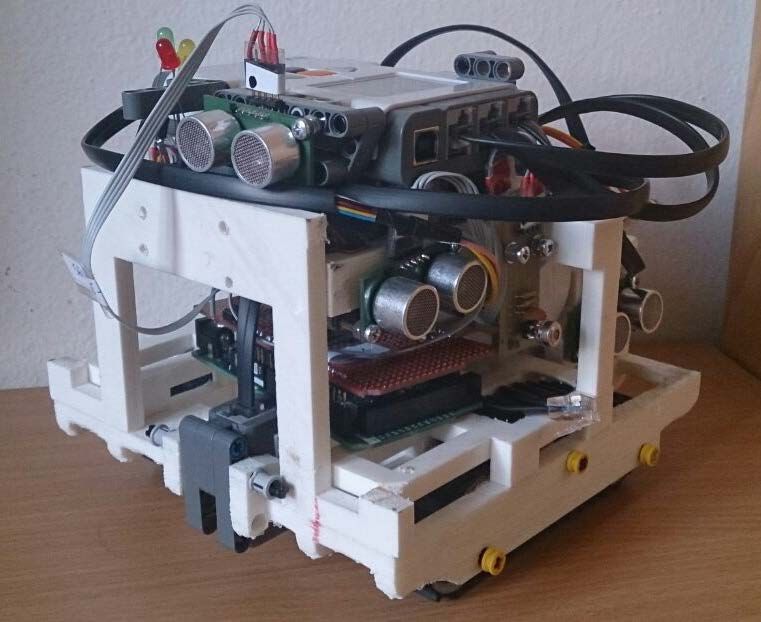
FIGURA 1: BASE TELAIO
Si è deciso di creare una base del telaio di forma rettangolare
per rendere più stabile la struttura.
È stata posta la scheda Arduino Mega al centro della
struttura, per consentire una migliore connessione con i
sensori. Si è inoltre deciso di lasciare dello spazio libero
intorno alla scheda Arduino: questa soluzione ha permesso di
avere tutte le porte libere da eventuali ostruzioni di parti
meccaniche riducendo così di molto le problematiche inerenti
ai collegamenti tra le varie componenti.
I.S.”Degasperi”
21ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
FIGURA 2: SUPPORTO ARDUINO
Si è progettata la piattaforma di
controllo NXT in una posizione
sopraelevata e con lo schermo
rivolto verso l’alto per facilitarne
l’utilizzo.
Per sostenere il mattoncino NXT
sono state costruite delle colonne
che hanno permesso di mettere i
sensori in una posizione più accentrata FIGURA 3: SUPPORTO NXT
in modo che essi possano rispettare
le distanze minime per permettere il
corretto funzionamento dei sensori.
I motori, posizionati in verticale, FIGURA 4: COLONNE DI SOSTEGNO
trasmettono il moto direttamente a due
cingoli a tre assi, che garantiscono una maggiore tensione del
cingolo stesso e migliorano la trazione. Tenendo in
considerazione che i cingoli hanno un centro di rotazione
nella parte centrale del robot, si è optato per questa
soluzione al posto delle ruote, che favoriscono una maggiore
I.S.”Degasperi”
22ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
stabilità ma allo stesso tempo un raggio di rotazione troppo
ampio.
Infine il supporto per lo smartphone con
sistema operativo Android è stato posto
posteriormente, con lo schermo verso
l’esterno per una maggiore facilità nel
controllo. Lo smartphone è stato messo
in posizione verticale per evitare di
compromettere la stabilità del robot.
FIGURA 5: SUPPORTO SMARTPHONE E MOTORI
FIGURA 6: VISTA ANTERIORE TELAIO
I.S.”Degasperi”
23ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
STAMPANTE 3D
Sharebot NG – Next Generation – è la stampante 3D di terza
generazione prodotta da Sharebot.
Una stampante dedicata ad un utilizzatore professionale che
cerca facilità, solidità e versatilità di utilizzo. La macchina offre
la migliore qualità di stampa della sua categoria. Può
stampare con una vasta gamma di materiali e, nella modalità
con doppio estrusore*, è possibile combinare colori e
materiali differenti. Sharebot NG è prodotta in Italia,
certificata CE e disponibile in due modelli: con singolo e
doppio estrusore.
Peso 14 Kg
Scocca Acciaio Inox
Carter Plexiglass
Ingombro 450*450*410 mm
Velocità
150cm3/h
massima
Ugello 0.35 mm
Spessore
minimo dello 0.05 mm
strato
Piano
Integrato
riscaldato
LCD monitor Integrato
Area di
stampa mono 250*200*200 mm (+/-5mm) (*)
estrusore
I.S.”Degasperi”
24ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Area di
stampa con
180*200*200 mm (+/-5mm) (*)
doppio
estrusore
Filamenti da 1.75 mm: ABS, ABS Plus, PLA, Nylon,
Filamenti Thermoplatic Polyurethane (TPU), Polystyrene,
utilizzabili Cristal Flex, PLA Brick, PLA Flex, PLA Thermosense,
PET
Blocco estrusore con regolazione
pressione sul filamento
Cuscinetti a riciclo di sfere su tutti gli
assi
Movimentazione asse z con viti
trapeizoidali
Piano di stampa regolabile
Micro USB per aggiornamento
firmware
Possibilità di stampa diretta da SD card
I.S.”Degasperi”
25ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
5. Unità di controllo
MICROCONTROLLORE KIT LEGO NXT,
Le sue specifiche tecniche sono:
Processore a 32 bit Atmel AT91SAM7S256
(classe ARM7) a 48 MHz (riferimento 2 della
figura)
Coprocessore 8 bit Atmel ATmega48 (classe
AVR: è un RISC a 8 bit) a 8 MHz, con 4k flash e
512 byte RAM (riferimento 3 della figura)
256KB memoria flash
64KB RAM
Interfaccia bluetooth v2.0+EDR (chipset CSR
BlueCore 4 version 2, clockato a 26 MHz, con
propri buffer RAM e firmware stack Bluelab
3.2) velocità teorica massima 0,46 Mbit/sec
(per trasferire il software o per controllare il
robot da remoto) (riferimento 1 della figura)
Display LCD bianco e nero da 100×64 pixel
(ogni pixel è circa 0,4×0,4mm);
Speaker mono 8 bit fino a 16 KHz;
Tastiera con quattro tasti in gomma.
I.S.”Degasperi”
26ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
4 porte di input
3 porte di output
Alimentazione con 6 batterie AA (1.5V)) oppu-
re tramite batteria ricaricabile al litio
Interfaccia per permettere lo sviluppo di pe-
riferiche da parte di terze parti.
ARDUINO MEGA
Arduino Mega è una scheda basata sul microcontrollore
ATmega 1280. Dispone di 54 pin digitali di I/O (di cui 14
possono essere utilizzati come uscite PWM), 16 ingressi
analogici, 4 UART (porte seriali hardware), un oscillatore a
I.S.”Degasperi”
27ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
cristallo a 16 MHz, una connessione USB, un jack di
alimentazione, un header ICSP, e un pulsante di reset. Esso
contiene tutto il necessario per supportare il
microcontrollore; per iniziare è sufficiente collegarla a un
computer con un cavo USB o alimentarla con un adattatore o
batteria CC-CA. Il Mega è compatibile con la maggior parte
delle schede progettate per Arduino Duemilanove o
Diecimila.
Di seguito sono elencate le specifiche tecniche:
Microcontrollore ATmega1280
Voltaggio operativo 5V
Voltaggio di Input 7-12V
Voltaggio di Input
6-20V
(limiti)
54 (of which 15 provide PWM
Pin Digitali I/O
output)
Pin Analogici di Input 16
Corrente DC per Pin I/O 40 mA
Corrente DC per Pin
50 mA
3.3V
128 KB of which 4 KB used by
Memoria flash
bootloader
SRAM 8 KB
EEPROM 4 KB
Velocità del clock 16 MHz
Le schede Arduino risultano facilmente programmabili per chi
deve apprendere i rudimenti della programmazione di sistemi
a microcontrollore. L’ambiente è portatile e multi piattaforma
e gira sotto Windows, Mac e Linux. La programmazione
I.S.”Degasperi”
28ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Arduino risulta semplificata rispetto all’utilizzo del linguaggio
C o dell’utilizzo dell’assembler anche per via delle librerie a
codice aperto disponibili. L’hardware è ampliabile attraverso
speciali schede denominate “shield” che si montano sopra le
scheda Arduino.
Arduino controlla i quattro sonar SRF05, i due sensori di
temperatura MLX9064 e il sensore di luminosità presente nel
kit LEGO. Il microcontrollore provvede alla lettura dei dati
provenienti da questi sensori e poi invia questi dati attraverso
un integrato dedicato siglato come MAX 485. L'integrato è in
grado, tramite due buffer bidirezionali, di comunicare
attraverso la porta 4 di Lego NXT che è predisposta per
sfruttare un protocollo di comunicazione seriale RS 485.
I.S.”Degasperi”
29ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
6. Sorgente di alimentazione
La fonte di alimentazione del robot è unica ed è costituita da
una batteria ricaricabile al litio che permette di sostituire il
pacco batterie formato da 6 batterie tipo AA da 1,5V. Essa è
in grado di alimentare anche il microcontrollore Arduino
attraverso la scheda autocostruita che permette la
comunicazione tra il microcontrollore NXT e Arduino. E'
prevista comunque la possibilità, tramite un ponticello, di
alimentare Arduino in maniera indipendente ad esempio
attraverso una batteria da 9 V DC.
I.S.”Degasperi”
30ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
7. Sensori
Luminosità
É uno dei due sensori (insieme a quello ultrasonico) che dà il
senso della vista all'NXT.
È in grado di:
• Distinguere tra il buio e la luce
• Misurare l'intensità della luce in un ambiente
• Misurare l'intensità della luce riflessa sulle superfici
(colorate o neutre)
• Riconoscere colori differenti
Oltre a misurare l'intensità della luce in un ambiente, questo
sensore è anche in grado di calcolare la distanza dalle superfi-
ci, emettendo una luce di colore rosso e misurando la quanti-
tà riemessa.
Una difficoltà nell'utilizzo di questo tipo di sensore è dovuta
alla sua estrema sensibilità nella misura della luce. Si riscon-
trano forti differenze di lettura al passare da una superficie
opaca ad una lucida, da una bianca ad una colorata. Inoltre
non risulta sfruttabile direttamente in stanze fortemente il-
luminate; infatti in luoghi dove è presente una elevata lumi-
nosità il sensore non riesce a rilevare variazioni utili (rimane
sempre intorno al valore massimo). Questo sensore può esse-
re utilizzato anche per distinguere colori diversi tra loro (es.
bianco-nero, rosso- blu).
I.S.”Degasperi”
31ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Sensore ad ultrasuoni (distanza)
Sensore Sonar SRF05 (acronimo di Sonic Range Finder 05), è
un misuratore di distanze che sfrutta gli ultrasuoni per
determinare la distanza dall'ostacolo che ha di fronte, ed in
questo caso è il quinto della serie (05).
Il range di localizzazione di questo tipo di sensori è quello
che vedete nell'immagine qui sotto:
I.S.”Degasperi”
32ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Come si vede dall'immagine, il sensore è costituito in
verità da due elementi (i due trasduttori di ultrasuoni)
ben evidenti e distinti, il loro compito è
rispettivamente quello di trasmettere e ricevere il
suono (ultrasuono) che “rimbalza” su un ostacolo.
Proseguendo nell'osservazione esterna del sensore,
sul retro della scheda di supporto ci sono vari circuiti
integrati ed altri componenti, questi costituiscono
l'intelligenza del sensore. I pin presenti sul lato
inferiore o sinistro delle immagini sono destinati al
collegamento con Arduino, mentre quelli superiori
sono usati per la programmazione del sensore in fase
di produzione.
I.S.”Degasperi”
33ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Grazie all' "intelligenza" inclusa nel sensore, tramite un
microcontrollore Arduino, si invia al piedino del sensore
denominato trigger, un impulso (valore alto) della durata di
dieci microsecondi; tale impulso vale per il sensore come
richiesta di lettura.
A questo punto il sensore tramite una delle due capsule
ultrasoniche, spara un treno di 8 impulsi di ultrasuoni (quindi
fuori dal campo dell'udito umano), i quali rimbalzano
sull’ostacolo più vicino e dopo un certo tempo ritornano
indietro per essere captati dall'altra capsula ultrasonica.
L’altra capsula (che in questo caso fa da microfono per
ultrasuoni) una volta ricevuto il suono, lo passa alla
circuiteria interna del sensore che lo normalizza e lo elabora
restituendo un impulso squadrato e pulito.
Il diagramma successivo mostra questi avvenimenti sulla
stessa linea temporale visti dai vari pin del sensore.
I.S.”Degasperi”
34ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Con Arduino si conta quanto tempo passa fra la
trasmissione e la ricezione dell'impulso,
"cronometrandolo”.
Si utilizza la formula:
Velocità = Spazio/Tempo
Per conoscere lo spazio che c'è fra il sensore e
l'ostacolo viene usata la formula inversa:
Spazio=Tempo x Velocità
quindi sapendo che la velocità del suono nell'aria è di
circa 340m/s ed avendo ricevuto da Arduino il tempo
intercorso, si può calcolare lo spazio o distanza.
Sensore a infrarossi (calore)
Sensore MLX90614, sensore della Melis, svolge funzione di
termometro ad infrarossi senza contatto. Al suo interno è
equipaggiato con un convertitore analogico digitale (DAC) a
I.S.”Degasperi”
35ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
17 bit e con un processore digitale di segnali (DSP) in grado
di assicurare ottima risoluzione ed accuratezza. Il sensore ha
un vasto campo di applicazione, tra cui le misurazioni della
temperatura corporea e la rilevazione del movimento. I dati
in uscita dal MLX90614 possono essere forniti secondo due
modalità: PWM (pulsa Wirth modulati on o modulazione a
larghezza di impulsi) o attraverso protocollo di
comunicazione seriale detto SMBus. Il System Management
Bus, abbreviato con SMBus o SMB, significa letteralmente
"Bus per il controllo del sistema", ed è un semplice bus di
collegamento a due fili usato per la comunicazione seriale a
bassa velocità tra dispositivi integrati in particolare tra
microcontrollori come Arduino e periferiche come il sensore
di temperatura in oggetto. SMBus è sostanzialmente un
sottoinsieme del sistema di comunicazione seriale I²C,
acronimo di Inter Integrated Circuit, un sistema di
comunicazione seriale bifilare utilizzato tra circuiti integrati.
Il sensore MLX90614 nella modalità PWM fornisce un
dato a 10 bit con una risoluzione di 0,14° C, mentre nella
modalità I2C presenta una risoluzione di 0,02 °C.
L'MLX90614 è tarato in fabbrica secondo diversi intervalli di
temperatura ad esempio da - 40 a 85 °C per rilevare
temperature ambientali oppure tra -‐70 e 382,2°C per la
temperatura di oggetti. I valori misurati dal sensore sono
correlati con la temperatura media di tutti gli oggetti nel
campo di vista del sensore. L'MLX90614 è in grado di offrire
una precisione standard di 0,5 °C. Questo dispositivo viene
fornito secondo lo standard industriale TO-‐39 in due
versioni: una con alimentazione a 5 V e l’altra funzionante a
3V.
I.S.”Degasperi”
36ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
8. Attuatori
N° 2 servomotori
Il kit base fornito da LEGO prevede 3 servo motori del peso di
60g ciascuno. Ogni motore ha al sul interno un encoder (sen-
sibilità 1 grado) che assicura il corretto posizionamento del
rotore.
Servomotore funzionante in corrente continua (DC), che viene
collegato a una delle 3 porte di OUTPUT (A B C).
Caratteristiche:
Tensione alimentazione 9V (DC)
Velocità max 170 rpm (giri/minuto) (117 rpm a 9V)
Potenza meccanica a 9V 2,03W
Potenza elettrica a 9V 4,95W
Efficenza a 9V 41%
Assorbimento a 9V 0,55A
No-Load current 60 mA
Coppia a 9V 16,7 N*cm
Coppia in stallo 50 N*cm
Corrente di stallo 2 A
Peso 80 gr.
I servomotori assemblati con encoder di rotazione ottici in-
terni permettono di misurare la velocità e/o la distanza per-
I.S.”Degasperi”
37ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
corsa. Grazie al software è possibile sincronizzare più motori e
garantire che si muovano alla stessa velocità.
Due servomotori sono stati utilizzati per consentire il
movimento del robot e il terzo azionare il sistema di sgancio
del Kit di soccorso.
I.S.”Degasperi”
38ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
9. Ambiente di sviluppo
Le possibilità relative alla programmazione del robot sono
molteplici ma si dividono sostanzialmente in due principali ca-
tegorie: da una parte ci sono i linguaggi grafici (ad esempio
quello sviluppato per la LEGO dalla National Instruments) e
dall'altra ci sono i linguaggi imperativi strutturati (ad esempio
quello Open source scaricabile da Source Forge chiamato un
po' ironicamente NXC - Not eXactly C).
Per realizzare il nostro robot abbiamo deciso di utilizzare tre
diversi dispositivi: Arduino Mega e NXT connessi tra loro me-
diante il protocollo di comunicazione RS485 e uno smartpho-
ne con SO Android per la mappatura del percorso.
Il primo dispositivo che andiamo ad analizzare è l'NXT.
NBC: (Next Byte Codes) è un linguaggio di programmazione
Open source a livello assembly. Il robot NXT ha un interprete
dei comandi che può essere usato per eseguire programmi. Il
compilatore NBC traduce il programma sorgente nel byte-‐
code del NXT, che può essere eseguito direttamente dal brick
NXT Il linguaggio NBC descrive la sintassi assembly con la qua-
le scrivere i programmi mentre la NBC (Application Program-
ming Interface (API)) descrive le funzioni, le costanti e le ma-
cro che possono essere utilizzate dai programmi. Queste API
sono raccolte in un header file che deve essere importato
all’inizio del programma per poterle utilizzare.
L' NXC: (Not eXactly C) un linguaggio di programmazione open
source con sintassi simile al C. Il compilatore NXC non fa altro
che tradurre il codice NXC in NBC è poi richiamare il compila-
tore di NBC.
La scheda Arduino Mega invece è una scheda indirizzata ad
un utilizzo semi-professionale in grado di comunicare sia con
l'NXT che con uno smartphone. Arduino è una piattaforma
I.S.”Degasperi”
39ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
open source per la prototipizzazione elettronica basata su un
hardware e un software di facile utilizzo per chiunque
possa essere interessato alla creazione di oggetti e ambienti
interattivi. La piattaforma è composta da un ambiente di pro-
grammazione (IDE: Integrated Development Environment)
che permette di scrivere, compilare e fare il debug di pro-
grammi nominati “sketches” che vengono caricati su una del-
le schede hardware Arduino. Il linguaggio di programmazione
per Arduino si basa su C/C+. La piattaforma Arduino è aperta
e permette di creare sistemi in grado di interagire con il con-
testo e di esercitarsi nel campo del cosiddetto “physical com-
puting” potendo utilizzare svariati sensori e trasduttori pre-
senti sul mercato.
Come SO per il quale creare l'applicazione per lo smartphone
abbiamo scelto Android in quanto sono disponibili in rete in-
numerevoli guide sulla programmazione
I.S.”Degasperi”
40ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
10. Software di controllo
Si è deciso di risolvere le problematiche principali emerse du-
rate la realizzazione del software suddividendolo in più algo-
ritmi, ciascuno dei quali è eseguito da una o due specifiche
piattaforme.
Di seguito sono elencati i principali problemi analizzati:
• Comunicazione
• Rilevamento delle pareti
• Mappatura del labirinto
• Movimento e rotazione
• Allineamento del robot con i muri
• Trovare le vittime
• Rilasciare il kit di soccorso
• Riconoscere la salita.
COMUNICAZIONE
I.S.”Degasperi”
41ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Per la comunicazione tra NXT e Arduino si è scelto di utilizzare
il protocollo RS485 mentre lo smartphone è collegato tramite
USB.
RILEVAMENTO DELLE PARETI
Constatando che in fase di gara il robot si muoverà in un labi-
rinto delimitato da pareti, uno dei problemi principali è stato
quello di creare un software che permettesse al robot di rile-
vare le pareti ad esso adiacenti. Il gruppo si è avvalso di 3 sen-
sori ad ultrasuoni (i quali attraverso un impulso ad ultrasuoni
che viene riflesso dalle pareti sono in grado di stabilire la di-
stanza da esse), posti davanti, a destra e a sinistra del robot.
Questi informano Arduino sulle distanze dai muri.
MAPPATURA
Per la mappatura del labirinto si è realizzata una applicazione
in Android. I dati rilevati dai sensori a ultrasuoni vengono co-
municati all’applicazione che le elaborerà. Il software restitui-
sce ad Arduino un’azione da compiere. Quest’ultimo in que-
sta fase funge unicamente da tramite ed invia l’ordine ad
NXT.
I.S.”Degasperi”
42ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
I.S.”Degasperi”
43ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
MOVIMENTO
Ricevuto l’ordine da Arduino, l’NXT lo esegue. L’azione può
essere interrotta per due motivi: nel caso venga rilevata una
sorgente di calore o la presenza di una parte di labirinto di co-
lore nero. Per il movimento sono stati usati due motori in do-
tazione con il kit Lego con l’utilizzo dei PID per rimediare
all’errore nella rotazione.
ALLINEAMENTO DEL ROBOT CON LE PARETI
Per l’allineamento sono stati utilizzati due sensori ad ultra-
suoni installati sul lato destro e sinistro del robot attraverso i
quali è stato possibile determinare l’eventuale disallineamen-
to. In tal caso il robot effettua delle piccole rotazioni su se
stesso affinché la differenza tra la distanza rilevata dai sensori
non sia annulla.
INDIVIDUARE LE SORGENTI DI CALORE
Uno dei principali compiti del robot consiste nel rilevare la
presenza di vittime rappresentate da degli emettitori di calo-
re. Per questo problema la scheda Arduino si serve di due
sensori di temperatura dai quali legge i dati mediante connes-
sione i2c. Viene fatto un controllo sulle temperature e se que-
ste soddisfano determinati requisiti allora viene inviato un se-
gnale ad NXT che avverte della presenza di una vittima.
RILASCIARE IL KIT DI SOCCORSO
Ricevuto l’input di comando, NXT si occupa di direzionare il
robot per rilasciare il kit verso la fonte di calore. In seguito
viene rilasciato il kit di emergenza e si attende un determina-
to intervallo di tempo dopo il quale viene effettuato il riposi-
zionamento.
I.S.”Degasperi”
44ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
RICONOSCERE LA SALITA
Una delle principali problematiche emerse è stata quella del
riconoscimento della salita. Per risolverla si è utilizzato un di-
spositivo creato artigianalmente che rileva una pendenza
tramite una differenza di potenziale elettrico. Questo cam-
biamento viene rilevato da Arduino che poi lo comunica ad
NXT e ad Android che faranno poi le opportune considerazio-
ni.
ANDROID
Android suddivide il campo di gara in una griglia bidimensio-
nale, con i dati ricevuti da Arduino.
Tale griglia viene aggiornata e costruita con classi che rappre-
sentano la posizione dei muri intorno al robot.
La sequenza di queste classi viene memorizzata e riutilizzata
nel momento di tornare al punto di partenza.
I.S.”Degasperi”
45ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Android ricorda la posizione delle vittime e degli spazi neri e
reagisce di conseguenza quando viene interpellato da Ardui-
no.
I.S.”Degasperi”
46ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
Appendice 1. Elementi di ispirazione
LOGO
Per la realizzazione del logo si è partiti dal nome del robot.
Attraverso un brain-storming è stato associato Ulisse a vari
temi dei quali il più rilevante è stato l'idea del viaggio.
Il viaggio nell'ignoto, la ricerca, sono correlate strettamente
alla roboetica e perciò si è presa l'immagine simbolica della
nave e per svilupparla è stata utilizzata una trama che avesse
a che fare con l'aspetto tecnico del robot Ulisse, ed è parsa
una idea accattivante utilizzare dei circuiti stilizzati.
Il programma che è stato utilizzato è Adobe Illustrator 17.0.1,
software professionale che fa parte della gamma Adobe Crea-
tive Cloud, che permette di creare immagini vettoriali ad alta
risoluzione.
I.S.”Degasperi”
47ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
GRUPPO WHATSAPP
Il gruppo degli studenti ha comunicato in modo informale
attraverso un provider di messaggistica istantanea online
dove sono emerse simpatiche ma costruttive conversazioni.
I.S.”Degasperi”
48ROBOCUP JR ITALIA 2015 – MALPENSA FIERE 8-11 aprile
REPORT DI DOCUMENTAZIONE
I.S.”Degasperi”
49Puoi anche leggere