Manuale dell'utente (it) - 06/2019 v.1.3 - Mobile Industrial Robots
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

Manuale dell'utente (it) 06/2019 v.1.3

Copyright ed esclusione di responsabilità Tutti i diritti riservati. Nessuna parte del presente manuale può essere riprodotta in alcuna forma senza esplicita autorizzazione scritta di Mobile Industrial Robots A/S (MiR). MiR non fornisce alcuna garanzia, né esplicita né implicita, in relazione al presente documento o al suo contenuto. Inoltre, il contenuto del documento è soggetto a modifiche senza preavviso. Nella stesura del presente manuale è stata adottata la massima cura, tuttavia MiR declina qualsiasi responsabilità in relazione a errori, omissioni o eventuali danni derivanti dall'utilizzo delle informazioni qui contenute. Copyright © 2019 di Mobile Industrial Robots A/S. Contatti del produttore: Mobile Industrial Robots A/S Emil Neckelmanns Vej 15F DK-5220 Odense SØ www.mir-robots.com Telefono: +45 20 377 577 Email: support@mir-robots.com CVR: 35251235 MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 2

Sommario 1. Informazioni sul presente documento 5 1.1. Dove trovare ulteriori informazioni 5 1.2. Cronologia del documento 6 2. Sicurezza 7 2.1. Tipi di messaggi di sicurezza 7 2.2. Precauzioni generali di sicurezza 8 2.3. Uso improprio prevedibile 9 2.4. Valutazione del rischio 10 2.5. Rischi residui 11 2.6. Funzioni e interfacce relative alla sicurezza 11 2.7. Limitazione delle funzioni di sicurezza 12 2.8. Batteria al litio 13 3. Per iniziare 14 3.1. Contenuto della confezione 14 3.2. Apertura della confezione del MiR200 15 4. Messa in servizio 17 4.1. Accensione 17 4.2. Connessione all'interfaccia del robot 22 4.3. Controllo del robot in modalità manuale 23 4.4. Controllo delle condizioni dell'hardware 25 4.5. Ricarica del robot 25 4.6. Spegnimento del robot 28 5. Presentazione del prodotto 29 5.1. Caratteristiche principali del MiR200 29 5.2. Etichetta dei dati 31 5.3. MiR200: componenti esterni 31 5.4. MiR200: componenti interni 33 5.5. Sistema dei sensori 34
5.6. Indicatori luminosi 42 6. Manutenzione 43 6.1. Controlli settimanali e manutenzione ordinaria 43 6.2. Controlli e sostituzioni regolari 44 6.3. Imballaggio per il trasporto 47 7. Applicazioni 49 7.1. Installazione di un modulo superiore 49 8. Specifiche del carico utile 51 9. Specifiche dell'interfaccia 58 9.1. Interfaccia dell'applicazione 58 9.2. Arresto di emergenza 59 9. Aggiornamento del software MiR200 60

1. Informazioni sul presente documento
1. Informazioni sul presente documento
Il presente documento contiene le seguenti informazioni:
• Come avviare e utilizzare il MiR200.
• Presentazione del prodotto.
• Applicazioni tipiche.
• Linee guida per la manutenzione del robot.
1.1. Dove trovare ulteriori informazioni
Sul sito www.mir-robots.com sono disponibili le seguenti risorse supplementari. Per
consultare le pagine del sito del distributore, accedere con il proprio account-distributore
all'indirizzo http://www.mobile-industrial-robots.com/en/account/.
• Sito del distributore > Manuali
http://www.mobile-industrial-robots.com/it/account/manuals/
Questa pagina contiene le seguenti risorse:
- MiR200 - Guida rapida
Una guida sintetica che consente di mettere rapidamente in funzione il robot. Il docu-
mento (in formato cartaceo) si trova nella confezione insieme al robot. Disponibile in
più lingue.
- MiRCharge 24V - Guida operativa
Una guida operativa che spiega come configurare il MiRCharge 24V e configurare il
MiR200 per la ricarica automatica della batteria nella stazione di ricarica.
- Guida di riferimento dell'interfaccia MiR Robot 2.0
La guida di riferimento che descrive gli elementi dell'interfaccia del MiR200. Dispo-
nibile in più lingue.
- MiR200 - Riferimento API REST.
Il riferimento per l'API REST per il robot.
• Sito del distributore > Download
http://www.mobile-industrial-robots.com/it/account/download/
Questa pagina contiene le seguenti risorse:
- Disegni CAD.
Fare clic su Visualizza file CAD per visualizzare l'elenco dei disegni CAD disponibili.
- Certificati.
Fare clic su Visualizza certificati per accedere all'elenco dei certificati del robot.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 5
1. Informazioni sul presente documento
• Sito del distributore > Guide pratiche
http://www.mobile-industrial-robots.com/it/account/how-to/
Questa pagina contiene le istruzioni relative a diverse attività specifiche che si possono
eseguire con il robot.
• MiR200 - Pagina del prodotto
http://www.mobile-industrial-robots.com/it/products/mir200/
Questa pagina contiene specifiche, immagini e opuscoli del MiR200.
1.2. Cronologia del documento
Questa tabella mostra le versioni nuove e precedenti del presente documento e le loro
relazioni con le versioni del software del prodotto.
Data di pub-
Revisione Descrizione SW HW
blicazione
1.0 24/11/2017 Prima edizione. 2.0 1.0
1.1 17/08/2018 Aggiornamento per la versione 2.2.0 e ver- 1.2
dell'hardware 1.2 sioni suc-
cessive
Aggiornamenti e miglioramenti
in tutto il manuale
1.2 28/11/2018 Aggiornamento per la versione 2.3.0 e ver- 2.0
dell'hardware 2.0 sioni suc-
cessive
Aggiornamenti e miglioramenti
in tutto il manuale
1.3 26/06/2019 Aggiornamento per la versione 2.6.0 e ver- 3.0
dell'hardware 3.0 sioni suc-
cessive
Aggiornamenti e miglioramenti
in tutto il manuale
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 6
2. Sicurezza
2. Sicurezza
Leggere le informazioni contenute in questa sezione prima di accendere e utilizzare il
MiR200.
Prestare particolare attenzione alle istruzioni e alle avvertenze di sicurezza.
AVVISO
Mobile Industrial Robots declina qualsiasi responsabilità se il MiR200 o i suoi
accessori vengono danneggiati, alterati o modificati in qualsiasi modo. Mobile
Industrial Robots non sarà responsabile di eventuali danni causati al MiR200,
agli accessori o a qualsiasi attrezzatura a seguito di errori di programmazione
o del malfunzionamento del MiR200.
2.1. Tipi di messaggi di sicurezza
Nel presente documento si utilizzano i seguenti tipi di messaggi di sicurezza.
AVVERTENZA
Indica una situazione potenzialmente pericolosa che può causare la morte o
lesioni gravi.
• Adottare le precauzioni opportune per evitare danni e lesioni.
ATTENZIONE
Indica una situazione potenzialmente pericolosa che può causare lesioni lievi o
moderate. Avvertimenti per evitare comportamenti non sicuri.
• Adottare le precauzioni opportune per evitare danni e lesioni.
AVVISO
Indica informazioni importanti, comprese situazioni che possono provocare
danni alle apparecchiature o altri danni materiali.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 7
2. Sicurezza
2.2. Precauzioni generali di sicurezza
Questa sezione contiene precauzioni generali relative alla sicurezza.
AVVERTENZA
Se il carico non è posizionato o fissato correttamente sul robot, potrebbe
cadere oppure il robot potrebbe ribaltarsi.
• Verificare che il carico sia posizionato in conformità alle specifiche e fissato
correttamente. Consultare la sezione Specifiche del carico utile a pagina51.
AVVERTENZA
L'utilizzo di un'unità di ricarica diversa da quella fornita dal produttore può
causare un incendio.
• Usare solo l'unità di ricarica originale.
ATTENZIONE
Il robot non è in grado di individuare le scale in discesa e le aperture nel
pavimento.
• Contrassegnare le scale e le aperture nel pavimento come zone Proibite,
sulle mappe.
• Tenere aggiornate le mappe.
ATTENZIONE
Quando si controlla il robot tramite uno smartphone, metterlo in modalità
"aereo". Rischio di lesioni personali e/o danni al robot.
• Se si controlla il robot con uno smartphone, verificare che quest'ultimo sia
in modalità "aereo". Se si riceve una chiamata sullo smartphone, il con-
trollo del robot si interrompe.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 8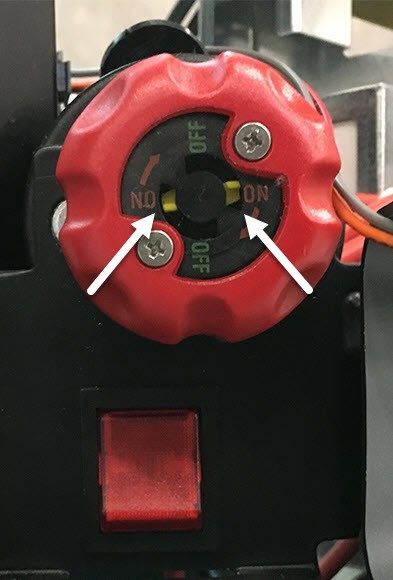
2. Sicurezza
AVVERTENZA
Le batterie al litio possono surriscaldarsi, esplodere o incendiarsi e causare
gravi lesioni, se vengono utilizzate in modo improprio a livello elettrico o
meccanico.
Attenersi alle seguenti precauzioni per la manipolazione e l'utilizzo delle
batterie al litio:
• Non cortocircuitarla, né ricaricarla o collegarla invertendo la polarità.
• Non esporla a temperature che non rientrano nell'intervallo indicato; non
incenerirla.
• Non schiacciare, forare né smontare la batteria. La batteria contiene dispo-
sitivi di sicurezza e di protezione che, se danneggiati, possono causare sur-
riscaldamento, esplosioni o incendi.
• Evitare che la batteria si bagni.
• Se la batteria perde liquido e il liquido entra in contatto con un occhio, non
strofinare l'occhio. Sciacquare a fondo con acqua e rivolgersi imme-
diatamente a un medico. Se trascurato, il liquido della batteria può causare
lesioni oculari.
• Utilizzare solo unità di ricarica (cavo di ricarica o stazione di ricarica) ori-
ginali e seguire sempre le istruzioni del produttore della batteria.
2.3. Uso improprio prevedibile
Qualsiasi uso o applicazione che si discosti dall'uso previsto si considera uso improprio.
Indichiamo alcuni esempi, ma l'elenco non è completo:
• Utilizzo del robot per trasportare persone.
Rischio di infortunio.
• Rampe ripide sul percorso.
Rischio di infortunio. Forti pendenze (rampe o altro) possono causare lo slittamento del
robot. Consultare le specifiche tecniche sul sito web.
• Uso all'aperto.
Rischio di infortunio. Il MiR200 è progettato e realizzato solo per essere utilizzato in
ambienti chiusi.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 9
2. Sicurezza • Sovraccarico del robot. Rischio di infortunio. Se si supera il carico utile massimo sul robot, il carico può ribaltarsi e cadere. Consultare le specifiche tecniche sul sito web. • Mancato rispetto delle linee guida per la messa in servizio. Consultare le sezioni Per iniziare a pagina14. • Mancata valutazione del rischio dell'installazione completa. Consultare la sezione Valutazione del rischio sotto. Si applica al robot quando sono installati moduli aggiuntivi. • Mancata configurazione dei segnali acustici e luminosi di avvertimento, in base all'ambiente. La mitigazione del rischio non è sufficiente. • Utilizzo fuori dai parametri operativi consentiti e dalle specifiche ambientali previste. Rischio di instabilità, impatto o ribaltamento. • Trasporto di liquidi o alimenti. Rischio di instabilità. • Utilizzo in ambienti potenzialmente esplosivi. • Utilizzo in applicazioni mediche e salvavita. 2.4. Valutazione del rischio Una delle operazioni più importanti per un'installazione sicura è la valutazione del rischio. L'esecuzione della valutazione del rischio rientra nella responsabilità della persona che mette in funzione il MiR200 nell'ambiente in cui verrà utilizzato. Generalmente si tratta di un integratore di sistemi che progetta e/o realizza celle di lavoro o altre infrastrutture necessarie correlate al MiR200. La valutazione del rischio non deve limitarsi al MiR200 in sé, ma deve anche tenere conto del potenziale modulo/manipolatore superiore, del trasferimento del carico, delle celle di lavoro e dell'ambiente in cui il robot viene utilizzato. Nel condurre la valutazione del rischio è consigliabile attenersi alle linee guida indicate dalle norme ISO 12100, EN 1525, ANSI B56.5 o da altre norme pertinenti. La valutazione del rischio prende in esame almeno i seguenti scenari: • Programmazione (configurazione durante la quale si creano le mappe e si definiscono e verificano le missioni) del robot in fase di installazione di quest'ultimo. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 10
2. Sicurezza
• Normale utilizzo del robot installato.
La norma EN 1525, al paragrafo 4, riporta un elenco di rischi significativi, di situazioni
pericolose e di eventi che si può consultare come riferimento.
La valutazione del rischio deve essere trascritta e conservata come componente del
fascicolo tecnico.
2.5. Rischi residui
Mobile Industrial Robots ha individuato i potenziali rischi significativi elencati di seguito
come possibile causa di pericolo che l'integratore deve prendere in considerazione.
• Rischio di essere investiti o trascinati, di rimanere intrappolati o di essere colpiti se ci si
trova sul percorso del MiR200 o se ci si avvicina mentre si sposta in retromarcia. Il
MiR200 procederà in retromarcia solo in fase di parcheggio, durante il prelievo di un car-
rello o quando si allontana da una postazione di ricarica, come la MiRCharge 24V.
• Schiacciamento o intrappolamento se l'utente tocca il MiR200. Leggere le avvertenze sul
MiR200.
• Rischio di rimanere schiacciati, trascinati o intrappolati nei pressi delle stazioni di tra-
sferimento del carico, delle celle di lavoro o delle stazioni di ricarica.
AVVISO
Possono essere presenti altri pericoli significativi in base all'installazione spe-
cifica del robot; devono essere individuati in fase di messa in servizio.
AVVISO
Rimangono validi i rischi residui per MiR100/MiR200.
2.6. Funzioni e interfacce relative alla sicurezza
Il MiR200 è dotato di numerose funzioni di sicurezza integrate e di interfacce elettriche di
sicurezza progettate per l'integrazione con un modulo superiore e/o un manipolatore
superiore. Tutte le funzioni e le interfacce di sicurezza sono progettate in conformità alla
norma ISO 13849-1.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 112. Sicurezza Le funzioni e le interfacce di sicurezza sono selezionate per supportare la conformità alla norma EN 1525. 2.7. Limitazione delle funzioni di sicurezza Il MiR200 è dotato di diverse funzioni di sicurezza integrate, per garantire un funzionamento sicuro nell'ambiente in cui il robot è destinato a essere utilizzato. L'evoluto software di controllo garantisce che i movimenti e il tipo di avanzamento rientrino nei limiti di sicurezza, evitando di attivare le funzioni di sicurezza. Il superamento dei limiti quindi avverrà solo in casi eccezionali. Se però un limite viene superato, il sistema di sicurezza determina un arresto di categoria 0 (arresto mediante "interruzione immediata dell'alimentazione degli attuatori della macchina ai sensi della norma IEC 60204-1") seguito da una frenata controllata, per arrestare il MiR200. Per ulteriori dettagli, consultare le specifiche tecniche sul nostro sito web. Funzione anti-collisione La funzione di sicurezza anti-collisione determina l'arresto del robot prima che entri in contatto con una persona o un oggetto. Questa funzione prevede la misurazione della velocità alle due ruote motrici e la conseguente selezione dei campi protetti predefiniti. Quanto maggiore è la velocità, tanto più estesi saranno i campi protetti. In questo modo il sistema garantisce che il robot si fermi in tempo qualora rilevi un oggetto o una persona all'interno del campo protetto attivo. La funzione anti-collisione si disattiva automaticamente due secondi dopo che il campo protetto risulta libero. Controllo della velocità Il sistema di sicurezza controlla se la velocità di ciascun motore supera il limite massimo nominale, rilevando se un segnale di controllo della velocità è stato perso per qualsiasi motivo. La funzione di controllo della velocità deve essere disattivata manualmente agendo sul pulsante di riavvio. Arresto di emergenza Il MiR200 è provvisto di dispositivo di arresto di emergenza. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 12
2. Sicurezza
L'arresto di emergenza deve essere utilizzato solo in caso di emergenza, non per arrestare il
robot durante la normale attività.
L'arresto di emergenza deve essere disattivato manualmente agendo sul pulsante di riavvio.
2.8. Batteria al litio
Questa sezione contiene le precauzioni di sicurezza relative alle batterie al litio dei robot
MiR.
AVVERTENZA
Le batterie al litio possono surriscaldarsi, esplodere o incendiarsi e causare
gravi lesioni, se vengono utilizzate in modo improprio a livello elettrico o
meccanico.
Attenersi alle seguenti precauzioni per la manipolazione e l'utilizzo delle
batterie al litio:
• Non cortocircuitarla, né ricaricarla o collegarla invertendo la polarità.
• Non esporla a temperature che non rientrano nell'intervallo indicato; non
incenerirla.
• Non schiacciare, forare né smontare la batteria. La batteria contiene dispo-
sitivi di sicurezza e di protezione che, se danneggiati, possono causare sur-
riscaldamento, esplosioni o incendi.
• Evitare che la batteria si bagni.
• Se la batteria perde liquido e il liquido entra in contatto con un occhio, non
strofinare l'occhio. Sciacquare a fondo con acqua e rivolgersi imme-
diatamente a un medico. Se trascurato, il liquido della batteria può causare
lesioni oculari.
• Utilizzare solo unità di ricarica (cavo di ricarica o stazione di ricarica) ori-
ginali e seguire sempre le istruzioni del produttore della batteria.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 133. Per iniziare 3. Per iniziare Questa sezione spiega come iniziare a usare il MiR200. 3.1. Contenuto della confezione Questa sezione descrive il contenuto della confezione del MiR200. La confezione contiene: 1. Il robot MiR200 2. Kit MiR200 • Pulsantiera di arresto d'emergenza, antenna esterna e 4 bulloni M10x40 • Un cavo di ricarica • Un caricabatterie esterno da 24 VCC, 10 A 3. La cartella di documenti MiR200 contenente i documenti cartacei e l'unità di memoria flash USB. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 14
3. Per iniziare
4. Documenti cartacei:
• MiR200 - Guida rapida
• Nome utente e password MiR
• Dichiarazione di conformità CE
5. Unità di memoria flash USB contenente quanto segue:
• MiR200 - Manuale dell'utente
• Guida di riferimento dell'interfaccia MiR Robot 2.0
• Riferimento per REST API MiR Robot
• Nome utente e password MiR
• Dichiarazione di conformità CE
3.2. Apertura della confezione del MiR200
Questa sezione descrive l'apertura della confezione del MiR200.
Conservare l'imballaggio originale per trasportare il robot in futuro.
1. Rimuovere il coperchio del pallet ed estrarre la scatola con il kit MiR200. Conservare
l'imballaggio originale per trasportare il robot in futuro.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 153. Per iniziare 2. Rimuovere l'imbottitura di schiuma, i blocchi di schiuma laterali e il telaio del pallet. 3. Posizionare il coperchio del pallet in modo che funga da rampa sul retro del robot. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 16
4. Messa in servizio
4. Messa in servizio
Questa sezione spiega come iniziare a usare il MiR200.
AVVISO
Prima di mettere in funzione il robot, leggere il capitolo sulla sicurezza.
4.1. Accensione
Per accendere il MiR200, procedere come segue.
1. Afferrare i due angoli arrotondati e sollevare con cautela il coperchio.
2. Collegare uno dei due cavi della batteria al connettore sulla parte superiore della bat-
teria. Il secondo cavo è utilizzabile per una batteria supplementare.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 174. Messa in servizio 3. Alzare i tre interruttori nell'angolo vicino allo scanner laser anteriore. Iniziare dall'interruttore di rete da 32 A, procedendo dall'esterno verso l'interno. 4. Verificare che il sezionatore della batteria sia chiuso (entrambi gli indicatori gialli rivolti verso l'indicazione ON). MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 18
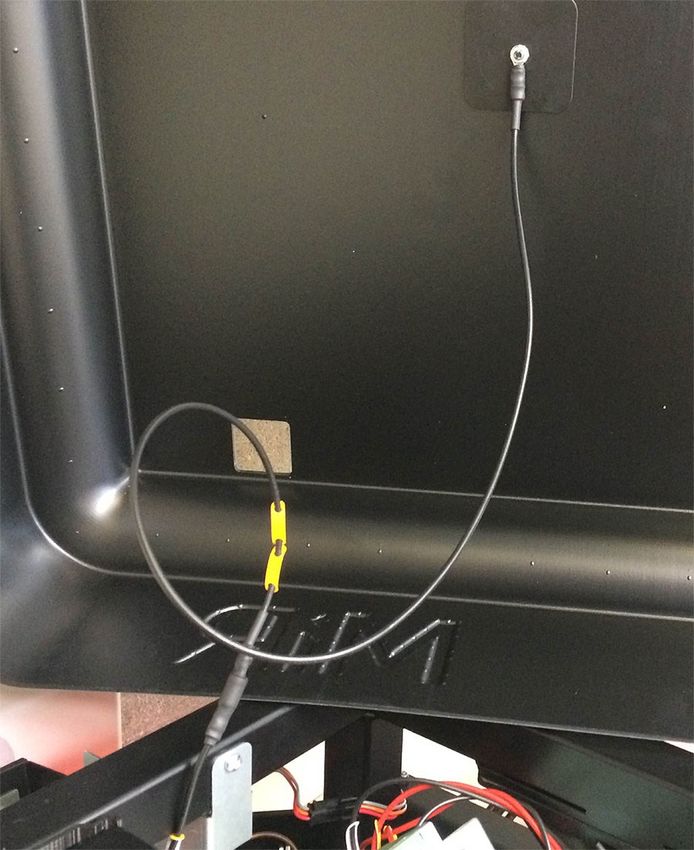
4. Messa in servizio 5. Collegare i due cavi antistatici provenienti dal telaio del robot accanto all'altoparlante e all'interno del coperchio. 6. Riposizionare il coperchio prestando attenzione a inserirlo correttamente sulle aperture del connettore. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 19
4. Messa in servizio
7. Installare e collegare la pulsantiera di arresto d'emergenza sulla sommità del coperchio
del robot.
Se si prevede di installare un modulo superiore sopra il robot, il pulsante di
emergenza deve essere posizionato in un punto facilmente accessibile. Con-
sultare la sezione Installazione di un modulo superiore a pagina49.
8. Collegare l'antenna al connettore sulla sommità del coperchio del robot. Prima di fissare
l'antenna, rimuovere il tappo di plastica dal connettore.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 204. Messa in servizio
L'antenna si può abbassare e ruotare in tutte le direzioni, per funzionare
anche sotto un modulo superiore.
9. Premere il pulsante di alimentazione blu, nell'angolo, per avviare il robot. Il robot si
accende e si illumina in giallo lampeggiante per un breve istante, quindi passa alla moda-
lità di arresto d'emergenza, indicata da una luce rossa fissa.
10. Premere il pulsante di ripristino sulla pulsantiera di emergenza, quando si illumina. La
luce gialla del robot ora rimane fissa, indicando che il robot è in pausa, pronto all'uso.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 214. Messa in servizio
4.2. Connessione all'interfaccia del robot
Quando il robot è acceso, la connessione al suo punto di accesso WiFi è attiva. Il nome del
punto di accesso viene visualizzato nell'elenco delle connessioni disponibili sul PC, sul tablet
o sul telefono.
AVVISO
Il nome utente e la password per il punto di accesso WiFi del robot e per
l'accesso all'interfaccia web sono disponibili nel documento Nome utente e
password MiR. Il documento si trova nella cassa del robot.
Per connettere il robot all'interfaccia, procedere come segue:
1. Con un PC, un tablet o un telefono, connettersi al punto di accesso WiFi del robot. Il nome
del punto di accesso ha il seguente formato: MiR_SXXXX.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 224. Messa in servizio
2. In un browser, passare alla pagina mir.com ed eseguire l'accesso.
Ora il robot è pronto per scendere dalla rampa. Per procedere, passare alla modalità
manuale e utilizzare il joystick nell'interfaccia del robot. Consultare la sezione successiva,
Controllo del robot in modalità manuale sotto.
4.3. Controllo del robot in modalità manuale
Per controllare il robot in modalità manuale:
1. Nell'interfaccia del robot, selezionare l'icona del joystick. Quindi premere Manual con-
trol (Controllo manuale) per accedere all'interfaccia di controllo del joystick.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 234. Messa in servizio
2. La luce di stato si illumina in blu, indicando che il robot è in modalità manuale.
3. Controllare il robot usando il joystick.
Si consiglia di far scendere il robot lungo la rampa a marcia indietro.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 244. Messa in servizio 4.4. Controllo delle condizioni dell'hardware Per verificare che tutti i componenti hardware funzionino correttamente: Accedere all'interfaccia del robot. Consultare la sezione Connessione all'interfaccia del robot. Accedere al menu Monitoring (Monitoraggio) > Hardware health (Condizioni dell'hardware). Controllare che per tutti gli elementi della pagina sia indicato lo stato OK e che abbiano un punto verde sulla sinistra. Per ulteriori informazioni, consultare la sezione dedicata alle condizioni dell'hardware nella Guida di riferimento dell'interfaccia MiR Robot 2.0. 4.5. Ricarica del robot Il robot viene consegnato con la batteria carica e può funzionare fino a tre ore prima di essere ricaricato. Seguire questa procedura per caricare il robot con il cavo di ricarica in dotazione: MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 25
4. Messa in servizio
1. Rimuovere l'angolo posteriore tirandolo verso di sé. Le prime volte potrebbe essere
necessario applicare una certa forza.
Per evitare che la batteria si scarichi e si esaurisca rapidamente, durante
la ricarica con il cavo è consigliabile spegnere il robot.
Se si caricano due robot uno dopo l'altro con un cavo, attendere circa un
minuto tra lo scollegamento del primo e il collegamento del secondo. In
questo modo si avrà la certezza che il caricabatterie sia in grado di rilevare
il nuovo robot in carica.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 264. Messa in servizio
2. Collegare il caricabatterie alla presa del robot e a una presa di corrente. Premere
l'interruttore a due posizioni sul robot per iniziare la carica.
Usare solo il cavo di ricarica originale.
3. Dopo quattro ore e mezza al massimo, il robot è completamente carico.
4. Premere l'interruttore a due posizioni e scollegare il cavo di ricarica dal robot.
Richiudere il coperchio scorrevole nell'angolo.
Il robot rileva la presenza del cavo e il fatto che l'interruttore di carica è
premuto: in entrambi i casi passerà allo stato di arresto di emergenza.
Per informazioni sul tempo di ricarica, consultare le specifiche del robot sul sito www.mir-
robots.com.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 274. Messa in servizio 4.6. Spegnimento del robot Per spegnere il MiR200: 1. Verificare che il robot non si stia muovendo e non stia eseguendo alcuna azione. 2. Premere il pulsante ON/OFF. 3. Il robot inizia il processo di spegnimento. Durante lo spegnimento, le luci di stato si illuminano in giallo e si affievoliscono. 4. Il processo di spegnimento termina quando le luci di stato rimangono spente. Se si spegne il robot per trasportarlo o per sottoporlo a un intervento di assistenza o di riparazione, è necessario aprire anche il sezionatore della batteria e scollegare il cavo della batteria. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 28
5. Presentazione del prodotto 5. Presentazione del prodotto Il MiR200 è un robot mobile autonomo in grado di trasportare carichi e pallet fino a 200 kg all'interno di ambienti di produzione, magazzini e altri ambienti industriali. Gli utenti controllano il MiR200 tramite un'interfaccia basata sul Web, accessibili tramite browser da PC, smartphone o tablet. Ogni robot utilizza la propria rete. Consultare la sezione Connessione all'interfaccia del robot a pagina22. Il robot si può configurare per seguire un determinato percorso, per essere richiamato quando necessario o per svolgere operazioni più complesse (missioni). Il robot svolge le operazioni di localizzazione la navigazione tramite una mappa che può essere creata o importata quando si utilizza il robot per la prima volta. La mappa interna contiene le località definite (ufficio, consegna prodotti, are produzione e così via) utilizzate per la pianificazione logistica. Durante il funzionamento, grazie agli scanner laser di sicurezza il robot evita gli ostacoli dinamici (persone, mobili) non presenti nella mappa. Con un MiRCharge 24V, il robot si sposta automaticamente verso una stazione di ricarica. È sufficiente definire una missione di ricarica e una posizione di ricarica sulla mappa. 5.1. Caratteristiche principali del MiR200 Le caratteristiche principali del MiR200 sono le seguenti: • Possibilità di utilizzo in aree di lavoro frequentate Il robot è progettato per funzionare tra le persone ed è in grado di muoversi in modo sicuro ed efficiente anche in ambienti estremamente dinamici. • Pianificazione complessiva del percorso e adattamenti locali Il robot elabora autonomamente il percorso più efficiente per la sua destinazione. Modi- fica il percorso quando incontra ostacoli non indicati sono sulla mappa (come persone e oggetti). • Trasporto efficiente di carichi pesanti Il robot è progettato per automatizzare il trasporto di carichi fino a 200 kg in diversi set- tori, consentendo al personale di dedicarsi ad attività più redditizie. • Segnali acustici e luminosi Il robot emette continuamente segnali luminosi e acustici, indicando la modalità in cui si trova, come ad esempio in attesa di un incarico, trasferimento verso la destinazione, desti- nazione raggiunta o modalità di avviso. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 29
5. Presentazione del prodotto
• Intuitivo e flessibile
L'interfaccia basata sul Web, accessibile da PC, tablet o smartphone, consente di con-
trollare e monitorare facilmente il robot; la programmazione non richiede alcuna espe-
rienza precedente. Si possono configurare diversi livelli per i gruppi di utenti e
predisporre dashboard su misura per le esigenze dei diversi utenti.
• Avviso di "robot perduto"
Se in una determinata situazione il robot non è in grado di individuare il percorso verso la
destinazione, si ferma e l'indicatore di errore giallo-viola si illumina. A quel punto si può
eseguire un'azione volta ad attirare l'attenzione definita dall'utente per avvisare le per-
sone, oppure un'altra azione.
• Decelerazione automatica in presenza di oggetti
I sensori integrati determinano la decelerazione del robot quando rileva ostacoli davanti a
sé.
• Funzionamento ottimale in base alla superficie
Il robot è progettato per funzionare su un terreno pianeggiante e asciutto; le telecamere
3D rilevano gli oggetti e consentono di evitarli.
• Mappa interna
Il robot può utilizzare una planimetria ricavata da un sistema CAD oppure si può ela-
borare una mappa mediante navigazione manuale nell'intera area in cui il robot deve fun-
zionare. Durante la mappatura, i sensori del robot rilevano pareti, porte e mobili, creando
una mappa basata su questi input. Dopo aver creato la mappa si possono aggiungere loca-
lità e altre caratteristiche nell'editor delle mappe.
Componenti aggiuntivi
Sono disponibili i seguenti componenti aggiuntivi per il MiR200:
• MiRHook 200
È possibile installare sul MiR200 un gancio che consente di automatizzare il trasporto
interno dei carrelli.
Ulteriori informazioni sui componenti aggiuntivi sono disponibili sul sito www.-
mir-robots.com.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 305. Presentazione del prodotto
5.2. Etichetta dei dati
L'etichetta dei dati del MiR200 si trova sul retro del vano batteria.
CE Mobile Industrial Robots A/S dichiara che il MiR200 soddisfa i
requisiti delle direttive CE vigenti.
Serial no. Il numero di serie, composto da 15 cifre, è un identificativo
univoco del robot. Le ultime quattro cifre fanno parte del nome
originale del robot, ad esempio MiR R635.
MiR200 3.0 Nome del prodotto e versione dell'hardware.
Esempio di marcatura CE e di etichetta dei dati del MiR200.
5.3. MiR200: componenti esterni
Questa sezione tratta i componenti del MiR200 visibili all'esterno.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 315. Presentazione del prodotto
1. Coperchio superiore 11. Dietro il coperchio angolare
posteriore rimovibile: porta di
ricarica con interruttore
2. Ruote girevoli - Tutte le ruote agli 12. Sensori a ultrasuoni per il rile-
angoli vamento di oggetti trasparenti
(retro)
3. Ruota motrice - Controllo 13. Coperchio posteriore
differenziale
4. Dietro il coperchio angolare 14. Scanner laser posteriore
rimovibile: porta HDMI e "porta di
servizio" USB - Per il collegamento
al PC del robot
5. Pulsante di ripristino dello scanner 15. Foro di ancoraggio: uno in ogni
(giallo) e pulsante ON/OFF (blu) angolo, per il fissaggio dei moduli
superiori
6. Sensori a ultrasuoni per il 16. Connessione Ethernet RJ45
rilevamento di oggetti trasparenti
(lati)
7. Telecamere 3D di profondità 17. Interfaccia per le applicazioni -
Per collegare componenti fisici,
come ad esempio un gancio.
Consultare la sezione Specifiche
dell'interfaccia a pagina58
8. Piastre di collegamento - Per il 18. Presa per antenna
collegamento ai morsetti della
stazione di carica MiRCharge 24V
9. Scanner laser anteriore 19. Porta USB "di servizio" per il
collegamento del robot al PC
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 325. Presentazione del prodotto
10. Coperchio laterale 20. Interfaccia di arresto di
emergenza con opzioni
supplementari per il
collegamento a unità di piccole
dimensioni e ingresso I5 degli
scanner SICK - Consultare la
sezione Specifiche dell'interfaccia
a pagina58
MiR200: componenti esterni
5.4. MiR200: componenti interni
Questa sezione tratta i componenti del MiR200 visibili all'interno.
1. Interruttore automatico - Fusibile 10. PLC di sicurezza SICK
automatico tra batteria e
componenti
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 335. Presentazione del prodotto
2. Relè di spegnimento del robot - 11. Optoaccoppiatore - Segnale di
Apre i contatti del relè con arresto di emergenza al controller
interblocco (pos. 16) in fase di del motore
spegnimento del robot.
3. Controller del motore - Gestisce i 12. Altoparlante
due azionamenti del motore
4. Relè dei freni - Cortocircuita gli 13. Scheda MiR - Scheda di
avvolgimenti del motore per una interfaccia per giroscopio,
frenata più tempestiva accelerometro, ultrasuoni, luci,
circuito di
accensione/spegnimento e
comunicazione tramite bus CAN
5. Connettore della batteria per 14. Alimentazione a 24 V - Fornisce
batteria aggiuntiva una tensione stabile per PC e PLC
6. Relè di sicurezza per inibizione 15. Relè con interblocco - Attiva
coppia (controllato tramite SICK) l'alimentazione a 24 V per
accendere il robot
7. Collegamento bus CAN per 16. Protezione contro i picchi di
sistema di gestione batteria, tensione: protegge il circuito degli
registrazione dati; ad esempio, alimentatori assorbendo picchi di
numero di cicli di ricarica. tensione affinché non
Consultare la Guida di riferimento raggiungano la batteria e i
dell'interfaccia MiR Robot 2.0. componenti dei moduli superiori
8. Router - Rete locale a 2,4 e 5 GHz 17. Computer DFI
9. Batteria con connettore -
Alimentazione del robot
MiR200: componenti interni.
5.5. Sistema dei sensori
La collaborazione tra i sensori interni ed esterni consente al robot di spostarsi nell'ambiente
e soprattutto che possa funzionare in sicurezza tra persone e oggetti, come mobili,
macchinari, pallet e altro.
Questa sezione descrive la funzionalità dei diversi elementi del sistema dei sensori.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 345. Presentazione del prodotto Scanner laser di sicurezza Gli scanner laser di sicurezza del MiR200 sono di tipo SICK S300. In questa guida si utilizza il termine scanner laser di sicurezza. Funzioni dello scanner Due scanner laser di sicurezza posizionati in diagonale sugli angoli (anteriore e posteriore) del robot, scansionano l'ambiente circostante. Ogni scanner laser di sicurezza ha un campo visivo di 360°, fino a un metro di distanza dal robot, per una protezione visiva tutto intorno. Gli scanner laser di sicurezza hanno tre scopi: • Si usano per la mappatura; consultare anche la Guida di riferimento dell'interfaccia MiR Robot 2.0. • Consentono di localizzare il robot nell'ambiente e di pianificare i percorsi tra diversi punti. • Quando il robot è in funzione, scansionano costantemente l'ambiente circostante evitando impatti con oggetti e persone. Gli scanner laser di sicurezza rilevano oggetti collocati su un piano all'altezza di circa 200 mm dal terreno. Gli oggetti più in alto o più in basso non vengono rilevati dagli scanner laser di sicurezza. Quando sono in movimento, gli scanner laser di sicurezza scansionano costantemente l'ambiente circostante fino a 2,5 m di distanza. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 35
5. Presentazione del prodotto Durante la mappatura, la portata dello scanner laser di sicurezza è ridotta a 20 m per supportare mappe della massima qualità. Durante la mappatura di un'area, gli scanner laser di sicurezza hanno una portata massima di 20 m. I segnali degli scanner laser di sicurezza vengono combinati con gli input delle telecamere 3D e dei sensori di prossimità, per valutare se nel percorso del robot c'è un oggetto o una persona. In tal caso il robot rallenta gradualmente e contemporaneamente si sposta per evitare l'ostacolo. Se non è in grado di aggirare l'ostacolo, si ferma e aspetta che la via sia libera. Campi protetti I campi protetti fanno parte dei mezzi di rilevamento delle persone di cui il robot è dotato. I campi protetti sono costituiti da confini configurati singolarmente intorno al robot. Il MiR200 attiva il campo corretto in base alla velocità. Se una persona o un oggetto è presente nell'area e attiva il campo protetto, il robot esegue un arresto di protezione e rimane fermo fino a quando il campo protetto torna libero. Le seguenti tabelle mostrano le dimensioni dei campi protetti a diverse velocità. All'aumentare della velocità del robot aumentano le dimensioni del campo protetto degli scanner. I campi protetti sono diversi a seconda del fatto che il robot avanzi o indietreggi. Campi per la marcia in avanti La seguente tabella mostra le velocità e i campi protetti quando il robot avanza. La tabella descrive la lunghezza del campo davanti al robot in diverse situazioni. Ogni situazione è MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 36
5. Presentazione del prodotto
definita da un intervallo di velocità del robot. I colori e le situazioni nella tabella
corrispondono al campo mostrato nell'illustrazione sotto.
Campo davanti al
Situazione Velocità Commenti
robot
1 Da 1,40 a 0,20 20 mm Marcia indietro e marcia avanti
m/s lenta
Da 0,21 a 0,40
2 120 mm
m/s
Da 0,41 a 0,80
3 290 mm
m/s
Da 0,81 a 1,10
4 430 mm
m/s
Da 1,11 a 2,00 Marcia avanti alla velocità
5 720 mm
m/s massima
L'illustrazione mostra i confini del campo protetti in direzione di marcia avanti. L'estensione
del campo protetto cambia al variare della velocità del robot. Nella situazione 1, il campo si
estende fino a 20 mm in avanti, mentre nella situazione 2 arriva a 120 mm in avanti e così
via.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 375. Presentazione del prodotto
Campi per la marcia indietro
Questa tabella mostra le velocità e i campi protetti quando il robot indietreggia. I colori
corrispondono al campo mostrato nell'illustrazione successiva.
Situazione Velocità Campo Commenti
1 Da 1,14 a 1,80 m/s 30 mm Marcia indietro e marcia indietro lenta
2 Da 0,20 a 0,15 m/s 120 mm
3 Da 0,40 a 0,21 m/s 290 mm
4 Da 1,50 a 0,41 m/s 430 mm Marcia indietro alla velocità massima
L'immagine mostra i confini del campo protetti in direzione di marcia indietro. L'estensione
del campo protetto cambia al variare della velocità del robot. L'immagine mostra anche
come lo scanner anteriore riduce al minimo le dimensioni dei campi protetti quando il robot
si muove all'indietro.
AVVISO
Tolleranze per i campi protetti
Gli scanner misurano le distanze dai riflessi diffusi, quindi viene aggiunta una
tolleranza ai campi protetti per garantire il rilevamento sicuro delle persone
che li attraversano. La tolleranza è di 100 mm.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 385. Presentazione del prodotto
ATTENZIONE
I campi protetti sono configurati per essere conformi agli standard di sicurezza
del MiR200.
Se si apportano modifiche, Mobile Industrial Robots declina qualsiasi
responsabilità a proposito di incidenti correlati alla sicurezza e inoltre la
garanzia decade.
Telecamere 3D
Due telecamere di profondità 3D nella parte anteriore del robot rilevano gli oggetti che si
trovano davanti a quest'ultimo, mentre il pianificatore locale del robot adatta
costantemente i percorsi pianificati intorno a tali oggetti.
Le telecamere 3D rilevano oggetti:
• In verticale fino all'altezza di 1.800 mm a una distanza di 1.950 mm davanti al robot.
• In orizzontale a 180 mm per il primo rilevamento sul terreno.
Le telecamere 3D non rilevano oggetti a meno di 50 mm dalle ottiche.
Lo spazio compreso tra il terreno e l'altezza di 50 mm in verticale viene ignorato. Questo
spazio aumenta di 10 mm per ogni metro di distanza, in orizzontale.
Le letture della telecamera vengono utilizzate come dati di una nuvola di punti
3D. Non registrano oggetti né persone in modo riconoscibile.
Le seguenti illustrazioni mostrano il campo visivo delle telecamere.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 395. Presentazione del prodotto Le due telecamere 3D possono rilevare oggetti fino a un'altezza di 1.800 mm dal pavimento. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 40
5. Presentazione del prodotto Le due telecamere 3D hanno un campo visivo orizzontale di 118°. Sensori a ultrasuoni Sul robot sono presenti quattro sensori a ultrasuoni: due nella parte anteriore e due nella parte posteriore. I sensori a ultrasuoni consentono di rilevare oggetti trasparenti. Sensori interni Il sistema dei sensori interno del robot comprende i seguenti componenti: • Giroscopio (IMU) Misura l'orientamento e la velocità angolare del robot. • Encoder del motore Fornisce segnali di feedback in loop chiuso rilevando la velocità e/o la posizione dell'albero del motore. • Accelerometro Misura l'accelerazione non gravitazionale. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 41
5. Presentazione del prodotto • Encoder delle ruote Rileva i movimenti delle ruote. 5.6. Indicatori luminosi Il robot utilizza degli indicatori luminosi per segnalare la propria attività alle persone presenti. Luci di stato La banda luminosa a LED lungo tutto il robot indica lo stato operativo attuale. I colori possono anche essere usati nell'ambito delle missioni, ma la configurazione standard con cui il robot viene consegnato è la seguente. Le luci di stato mostrano lo stato operativo attuale del MiR200. MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 42
6. Manutenzione
6. Manutenzione
Nei seguenti programmi di manutenzione proponiamo una panoramica delle normali
procedure di pulizia e sostituzione dei componenti.
Gli intervalli proposti sono indicativi e dipendono dall'ambiente operativo e
dalla frequenza di utilizzo del robot.
AVVISO
Utilizzare solo ricambi approvati.
Mobile Industrial Robots declina qualsiasi responsabilità in relazione
all'utilizzo di ricambi non approvati. Mobile Industrial Robots non sarà respon-
sabile di eventuali danni causati al robot, agli accessori o a qualsiasi attrez-
zatura a seguito dell'utilizzo di ricambi non approvati.
6.1. Controlli settimanali e manutenzione ordinaria
Una volta alla settimana, svolgere le seguenti attività di manutenzione:
Componenti Attività di manutenzione
Copertura e lati del Pulire le parti esterne del robot con un panno umido.
robot
Non usare aria compressa.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 436. Manutenzione
Componenti Attività di manutenzione
Scanner laser Pulire le coperture delle ottiche degli scanner per garantire
prestazioni ottimali. Non usare detergenti aggressivi o abrasivi.
Pulire gli scanner laser con un panno umido oppure, per una
manutenzione migliore, consultare l'avviso qui di seguito. Procedere
in questo modo anche prima di contattare l'assistenza tecnica locale
qualora si verifichino i problemi indicati di seguito. Consigliamo di
pulire gli scanner laser ogni giorno, per contribuire a evitare questi
problemi.
Possibili problemi dovuti alla mancata pulizia degli scanner laser:
• Il robot non rileva i contrassegni o i rack per pallet
• Sul robot si attiva l'arresto di emergenza senza un motivo evidente
AVVISO
Le cariche elettrostatiche attraggono particelle di pol-
vere sulle coperture delle ottiche. È possibile con-
trastare questo effetto utilizzando il detergente
antistatico per plastica (codice SICK 5600006) e il
panno per ottiche (codice SICK 4003353). Consultare la
documentazione del produttore.
Ruote girevoli (le Rimuovere la sporcizia con un panno umido e verificare che non si
quattro ruote agli sia impigliato nulla nelle ruote.
angoli)
Ruote motrici (le Rimuovere la sporcizia con un panno umido e verificare che non si
due ruote centrali) sia impigliato nulla nelle ruote.
Banda luminosa a Controllare che la banda luminosa a LED sia intatta. Controllare che
LED la luce sia visibile intorno a tutto il robot.
6.2. Controlli e sostituzioni regolari
Prima di iniziare attività di sostituzione che richiedono di rimuovere il coperchio superiore:
• Premere il pulsante di alimentazione ON/OFF per spegnere il robot
• Premere il pulsante della batteria per interrompere l'alimentazione della batteria
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 446. Manutenzione
• Disattivare i relè e scollegare la batteria
Nella seguente tabella sono indicati i componenti da controllare e gli intervalli tra un
controllo e l'altro:
Componente Manutenzione Intervallo
Coperchio del Verificare la presenza di crepe. Controllare ogni mese e
robot sostituire se necessario.
Controllare l'installazione. È
installato correttamente sul robot
e le connessioni sono accessibili.
Ruote girevoli (le Controllare i cuscinetti e serrare. Controllare ogni settimana e
quattro ruote agli sostituire una volta all'anno.
angoli)
Ruote motrici (le Controllare l'usura delle superfici Controllare ogni sei mesi e
due ruote cen- delle ruote. sostituire se necessario.
trali)
AVVISO
Dopo aver sosti-
tuito le ruote è
necessario cali-
brare il robot. Per
farlo, accedere
all'interfaccia
utente del robot e
selezionare System
(Sistema) > Robot
setup (Con-
figurazione robot).
Qui sono dispo-
nibili ulteriori istru-
zioni.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 456. Manutenzione
Componente Manutenzione Intervallo
Scanner Controllare che non presentino Sostituire se necessario.
difetti visibili, come ad esempio
crepe o graffi.
AVVISO
Dopo aver sosti-
tuito gli scanner è
necessario cali-
brare il robot. Per
farlo, accedere
all'interfaccia
utente del robot e
selezionare System
(Sistema) > Robot
setup (Con-
figurazione robot).
Qui sono dispo-
nibili ulteriori istru-
zioni.
Arresto di emer- Per controllare il funzionamento Ogni tre o quattro mesi, ai sensi
genza dei pulsanti di arresto di emer- della norma EN/ISO 13850 sulla
genza, premere il pulsante rosso e sicurezza dei macchinari - Fun-
verificare che il pulsante di ripri- zione di arresto di emergenza.
stino di emergenza si illumini.
Telecamere 3D Controllare che non presentino Controllare ogni mese e sosti-
difetti visibili, come ad esempio tuire se necessario.
crepe o graffi.
Disinserimento Controllare che i freni si disin- Controllare ogni mese e sosti-
del freno manuale seriscano correttamente. Attivare i tuire se necessario.
freni e spingere delicatamente il
robot in avanti. Dopo la prova,
ricordarsi di disinserire il freno.
Cablaggio interno Verificare che tutti i cavi di rete e Controllare ogni sei mesi e sosti-
USB siano collegati correttamente. tuire se necessario.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 466. Manutenzione
Componente Manutenzione Intervallo
Contrassegni di Controllare che i contrassegni di Controllare ogni sei mesi e sosti-
sicurezza sul pavi- sicurezza, realizzati ad esempio tuire se necessario.
mento con nastro adesivo, intorno ai
punti di prelievo o di scarico, siano
intatti e visibili.
Adesivi di sicu- Controllare che gli adesivi di sicu- Controllare ogni sei mesi e sosti-
rezza rezza sul robot siano intatti e visi- tuire se necessario.
bili.
6.3. Imballaggio per il trasporto
Questa sezione descrive come imballare il robot per il trasporto.
Imballaggio originale
Per trasportare il robot, utilizzare i materiali di imballaggio originali.
I materiali di imballaggio sono i seguenti:
• Il fondo della cassa (il pallet).
• Il coperchio della cassa (la rampa).
• Le pareti della cassa.
• I blocchi protettivi di polietilene espanso: i blocchi laterali e lo strato superiore.
• Le viti.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 476. Manutenzione
Imballaggio del robot per il trasporto
Per imballare il robot per il trasporto:
1. Spegnere il robot. Consultare la sezione
2. Portare il sezionatore della batteria in posizione OFF (entrambi gli indicatori gialli rivolti
verso l'indicazione OFF).
Ripetere i passaggi descritti nella sezione Per iniziare a pagina14, ma nell'ordine inverso.
AVVISO
Imballare e trasportare il robot in posizione verticale. L'imballaggio e il tra-
sporto del robot in qualsiasi altra posizione renderanno nulla la garanzia.
Batteria
La batteria al litio è soggetta alle norme sul trasporto. Attenersi alle precauzioni di sicurezza
indicate in questa sezione e le istruzioni della sezione Imballaggio per il trasporto alla pagina
precedente. Si applicano diverse norme, in base alla modalità di trasporto: via terra, via
mare o via aerea.
Per ulteriori informazioni, rivolgersi al proprio distributore.
ATTENZIONE
Il trasporto delle batterie al litio è soggette a speciali limitazioni ai sensi del
Regolamento delle Nazioni Unite relativo alle merci pericolose, UN 3171. Per
rispettare queste norme è necessaria una speciale documentazione di tra-
sporto e questo può influire sui tempi del trasferimento e sui relativi costi.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 487. Applicazioni
7. Applicazioni
È possibile installare sul MiR200 dei moduli superiori per applicazioni specifiche. Ulteriori
informazioni sui moduli superiori sono disponibili in questa pagina:
http://www.mobile-industrial-robots.com/it/mir-tradeforum/
Per istruzioni sull'installazione dei moduli superiori e degli accessori, consultare i manuali
delle applicazioni sul sito www.mir-robots.com o rivolgersi al distributore.
7.1. Installazione di un modulo superiore
I moduli superiori devono essere fissati per mezzo dei fori di ancoraggio conici auto-serranti
presenti in ogni angolo del robot; la coppia di serraggio è di 47 Nm.
I moduli superiori si fissano ai fori di ancoraggio nel coperchio superiore.
ATTENZIONE
Alcuni moduli superiori potrebbero richiedere l'installazione di un pulsante di
arresto di emergenza supplementare. Eseguire la valutazione del rischio in
conformità alla norma ISO 12100.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 497. Applicazioni
ATTENZIONE
Alcuni moduli superiori possono determinare nuovi pericoli e/o maggiori rischi
non eliminabili o attenuabili con le misure per la riduzione del rischio appli-
cate da Mobile Industrial Robots. Eseguire la valutazione del rischio in con-
formità alla norma ISO 12100.
ATTENZIONE
Rispettare le specifiche relative al peso e al baricentro del carico utile; con-
sultare la sezione Specifiche del carico utile a pagina51.
MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 508. Specifiche del carico utile 8. Specifiche del carico utile I seguenti disegni illustrano le specifiche del baricentro (CoM) per un funzionamento sicuro con diversi valori di carico utile. Carico utile: 25 kg Carico utile: 50 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 51
8. Specifiche del carico utile Carico utile: 75 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 52
8. Specifiche del carico utile Carico utile: 100 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 53
8. Specifiche del carico utile Carico utile: 125 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 54
8. Specifiche del carico utile Carico utile: 150 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 55
8. Specifiche del carico utile Carico utile: 175 kg MiR200 Manuale dell'utente (it) 06/2019 - v.1.3 ©Copyright 2019: Mobile Industrial Robots A/S. 56
Puoi anche leggere