Lezione 32 Gestione dell'I/O - WEB Lab
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Lezione 32
Gestione dell'I/O
Sistemi Operativi (9 CFU), CdL Informatica, A. A. 2020/2021
Dipartimento di Scienze Fisiche, Informatiche e Matematiche
Università di Modena e Reggio Emilia
http://weblab.ing.unimo.it/people/andreolini/didattica/sistemi-operativi
1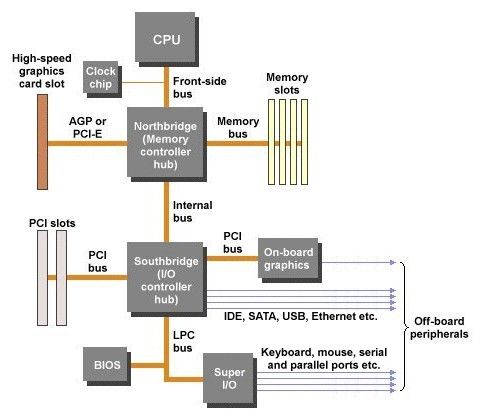
Quote of the day
(Meditate, gente, meditate...)
“The key to performance is
elegance, not battalions of special
cases.”
Doug McIlroy (1932-)
Matematico, Ingegnere, Programmatore
Ideatore del meccanismo “pipe”
Ideatore dei filtri UNIX
2ETEROGENEITÀ DEI DISPOSITIVI
3Gli ambiti della diversità
(Tanti, purtroppo)
Un PC moderno è collegato ad una miriade di
dispositivi di I/O, fortemente eterogenei sotto
diversi punti i vista.
Modalità di trasferimento dei dati.
Modalità di accesso ai dati.
Sincronia, asincronia e isocronia delle operazioni.
Velocità di trasferimento.
Modalità di programmazione delle richieste e prelievo
delle risposte.
4Modalità di trasferimento dati
(A blocchi oppure a caratteri)
Per interi blocchi di dati (si parla di periferiche a
blocchi).
→ Tali periferiche possono ospitare un file system
(dischi).
Per “pacchetti di dati” (periferiche di rete).
Per flussi di caratteri (si parla di periferiche a
caratteri).
→ Tutti i rimanenti dispositivi (porte seriali, mouse,
tastiere).
5Modalità di accesso dati
(Sequenziale oppure casuale, in lettura e/o scrittura)
Sequenziale o diretta (anche detta random).
In sola lettura (read-only, CDROM) o in lettura e
scrittura (read-write, dischi).
6Sincronia, asincronia, isocronia
(Delle operazioni di I/O)
Sincronia. Un dispositivo è detto sincrono se
accetta la richiesta successiva solo dopo aver
risposto alla precedente (porte seriali standard).
Asincronia. Un dispositivo è detto asincrono se
accetta molteplici richieste in aniera concorrente,
senza dover per forza rispondere subito (dischi
rigidi con Native Command Queueing, NCQ).
Isocronia. Un dispositivo è detto isocrono se
opera ad intervalli di tempo prestabiliti e rigidi
(periferiche USB); può essere sincrono o7
asincrono.Velocità di trasferimento
(Da pochi B/s a qualche GB/s)
La velocità di trasferimento può variare da alcuni
byte al secondo fino a qualche GB al secondo.
In generale:
i dispositivi a caratteri sono i più lenti (a meno che
non
operino con la memoria).
i dispositivi di rete hanno velocità variabili
nell'intervallo medio-alto.
i dispositivi a blocchi sono i più veloci.
La velocità di trasferimento necessita
delll'aggancio a bus opportuni. 8Bus in uso sui PC attuali
(OK, non proprio gli ultimissimi modelli...)
9TECNICHE PROGRAMMAZIONE I/O
10Programmazione dell'I/O
(Dispositivi diversi traggono beneficio da meccanismi diversi)
Programmazione delle richieste.
Port Mapped I/O (PIO).
Memory Mapped I/O (MMIO).
Attesa e ottenimento delle risposte.
Busy Waiting.
Polling.
Direct Memory Access (DMA).
Interrupt.
Interrupt mitigation.
11Port Mapped I/O (Scrittura in registri appositi → Impostazione di una operazione di I/O) La programmazione delle porte avviene tramite istruzioni assembly. Ad esempi, su x86 e x86_64: IN → spostamento di un dato da una porta di I/O ad un registro generale. OUT → spostamento i un dato da un registro ad una porta di I/O. Le corrispettive istruzioni INS e OUTS spostano un blocco di dati (stringa). Dispositivi che usano PIO: tastiera, clock interno, USB hub (v1.1). 12
Port Mapped I/O
(Specifica degli indirizzi delle porte)
L'indirizzo delle porte di I/O può essere specificato
in due modi distinti.
Uso di una costante:
IN AL, 0178h
OUT AL, 0178h
Uso di un valore contenuto in un registro:
MOVL DX, 0178h
IN AL, DX
OUT AL, DX
13Port Mapped I/O
(Dimensione dei dati)
La dimensione del dato è specificata in maniera
indiretta, tramite l'uso del registro nel primo
operando.
IN AL, 0178h → byte (8 bit)
IN AX, 0178h → word (16 bit)
IN EAX, 0178h → long word (32 bit)
Nel caso di trasferimento a 32 bit, l'indirizzo della
porta di I/O deve essere allineato a 32 bit.
In altre parole, deve essere un multiplo di 4.
14Memory Mapped I/O
(Scrittura in celle di memoria→ Invio dati alla periferica di I/O)
I dispositivi fisici utilizzano la memoria centrale come
spazio di indirizzi per i registri di stato, di controllo, dei
dati. Si usano le solite istruzioni assembly per la modifica
dei dati in memoria.
INTEL: istruzioni MOV, AND, OR, TEST.
I riferimenti alla memoria sono soggetti alle tecniche di
protezione degli accessi.
INTEL protected mode: accesso in Ring 0.
Dispositivi che usano MMIO: scheda audio, USB hub
(v2.0), controller SATA, scheda di rete wireless.
15Busy waiting
(La CPU controlla di continuo una condizione segnalante un evento)
Si controlla continuativamente che un evento
non si verifichi (tipicamente, tramite una variabile
che assume un valore).
Viene implementato con un ciclo while del tipo
while ( !condition ) {};
Metodo usato anche per implementare attese.
L'attesa è attiva, ossia avviene a spese della CPU
(donde il nome busy waiting).
16Busy waiting: vantaggi
(Estremamente reattivo)
L' evento è riconosciuto il più presto possibile.
Tecnica utilizzabile anche in quei casi in cui non è
previsto nel kernel un meccanismo di notifica del
completamento delle operazioni.
Tecnica utilizzabile anche in quei casi in cui non è
previsto nel kernel un meccanismo di blocco e
ripristino per le operazioni lente.
17Busy waiting: svantaggi
(Estremamente dispendioso)
La CPU è occupata al 100% nell'attesa.
Esempio: si lanci il comando seguente.
while [[ ! -a file.txt ]]; do :; done
Attesa attiva della creazione di file.txt.
Si lanci il comando mpstat 1 per misurare
l'utilizzazione di CPU → Una CPU al 100%.
Si crei il file file.txt con il comando touch
file.txt e l'utilizzazione scende a zero.
L'inefficienza aumenta con la durata degli eventi.
Non applicabile su sistemi alimentati a batteria. 18Polling
(La CPU controlla periodicamente una condizione segnalante un evento)
Si controlla periodicamente che un evento si sia
verificato (tipicamente, tramite una variabile che
assume un valore).
Viene implementato con un ciclo:
while while( !condition ) { sleep(timeout) };
A differenza del busy waiting, il controllo è
periodico (con frequenza costante oppure no).
Fra un controllo ed un altro, la CPU può eseguire
tracce di altri processi.
→ Il polling richiede un meccanismo di blocco 19e
ripristino per le operazioni di I/O lente.Polling: vantaggi
(Non così dispendioso come il busy waiting)
L'attesa non divora tempo di CPU.
Esempio: si lanci il seguente comando.
while [[ ! -a file.txt ]], do sleep 10; done
Polling della creazione di file.txt con frequenza pari a 0.1 Hz.
Si lanci il comando mpstat 1 per misurare
l'utilizzazione di CPU → Macchina scarica.
Si interrompa il comando con CTRL-C.
La CPU può occuparsi d'altro durante l'attesa.
20Polling: svantaggi
(Non così reattivo come il busy waiting)
L'evento non è riconosciuto il più presto possibile.
Nell'esempio precedente, l'attesa della notifica
del file è durata quasi 10 secondi.
Inadatto in sistemi con requisiti (quasi) real-time.
Richiede un meccanismo di blocco e ripristino dei
processi per operazioni di I/O lente.
Richiede un po' di risorse di CPU per il controllo
periodico (lieve inefficienza).
21Interruzioni
(La CPU si slega dal controllo di ricezione)
Obiettivo: liberare la CPU dal controllo
dell'avvenuta ricezione del dato.
La CPU si lascia segnalare l'avvenuta operazione
della periferica stessa, tramite una notifica
asincrona (Interrupt Request).
A ciascuna specifica notifica viene associata una
funzione di gestione di un evento (scadenza
timer, ricezione dato) detta Interrupt Service
Routine (ISR). 22Compiti specifici della ISR
(Pochi ma fondamentali)
Preleva il dato dal buffer della periferica.
Controlla il dato (checksum, intestazioni di
pacchetti, …).
Copia il dato nell'area di memoria preposta a
riceverlo.
Nel caso, impacchetta il dato in una struttura dati
e lo inserisce nelle liste opportune.
Abilita le interruzioni sulla CPU.
23Interruzioni: vantaggi
(Migliore efficienza nell'uso della CPU)
L'inefficienza legata al controllo del dato
scompare.
Le interruzioni migliorano il throughput di
processi I/O-bound rispetto al busy waiting e al
polling.
24Interruzioni: svantaggi
(Non così reattivo come il busy waiting)
L'arrivo del dato non è riconosciuto il più presto
possibile.
Occorre prima eseguire la Interrupt Service Routine.
Richiede un meccanismo di blocco e ripristino di
operazioni di I/O lente.
Richiede un meccanismo di notifiche asincrone di
eventi.
Richiede un po' di risorse di CPU per l'esecuzione
della Interrupt Service Routine (lieve inefficienza).25Interruzioni: svantaggi
(Una ISR deve eseguire velocemente, senza bloccarsi)
Eseguono in maniera asincrona, e quini possono
interrompere codice critico (altri interruptp handler) →
devono essere veloci.
Eseguono con l'interruzione in questione disabilitata
sulla CPU locale (nel migliore dei casi) o su tutte le CPU
(nel peggiore dei casi) → devono essere veloci.
Sono time-critical, poiché interagiscono direttamente
con l'hardware della macchina.
Non possono eseguire in process context, pertanto non
si possono bloccare → le operazioni che possono
compiere sono limitate. 26Direct Memory Access
(La ISR non deve più manipolare il buffer dati)
Il dispositivo è in grado di scrivere sulla memoria
centrale del calcolatore.
La CPU si svincola dalla procedura di copia dei
buffer in memoria centrale.
È necessario un ulteriore registro di I/O per la
memorizzazione dell'inddirizzo che contiene il
dato da leggere o da scrivere.
Meccanismo ideale per il trasferimento di buffer
grandi. 27CONTRASTO AL LIVELOCK
28Il vero punto debole delle interruzioni
(Il livelock)
Le interruzioni funzionano bene fino a quando il volume
di dati prodotti dai dispositivi non aumenta a dismisura.
L'aggravio computazionale legato alla gestione della
notifica asincrona è alto.
Il cuore della ISR esegue ad interruzioni disabilitate sulla
CPU → nessuna altra periferica può essere gestita su
quella CPU.
La ricezione di un dato comporta due context swith:
processo → ISR, ISR → processo.
Se le interruzioni sono gestite in modalità annidata e con
priorità, il kernel continua ad eseguire la ISR.
29Livelock
(La CPU passa tutto il tempo ad eseguire ISR)
In tale scenario, il sistema impiega tutto il suo
tempo ad eseguire funzioni di gestione (le ISR), e
non riesce ad eseguire processi: si ha un livelock.
Tratti distintivi del livelock: macchina piantata,
incapace di reagire agli stimoli dell'utente (il
mouse non funziona, il video è congelato, i
processi non avanzano).
Spesso, il livelock è causato da un disco oberato
di richieste (il LED del disco è costantemente
rosso). 30Contrasto al livelock (Si spezza la ISR in due funzioni: una esegue subito, l'altra successivamente) L'idea vincente per contrastare il livelock è quella di spezzare le operazioni della ISR in due parti: top half e bottom half. Top Half (la ISR vera e propria): esegue l'ACK della Interrupt Request. prepara un buffer dati e lo accoda in una coda speciale associata alla IRQ. schedula l'esecuzione in differita (deferred execution) di una procedura di gestione del dato recuperato. abilita le interruzioni sulla CPU ed esce. opera in Interrupt Context. 31
Contrasto al livelock
(Si spezza la ISR in due funzioni: una esegue subito, l'altra successivamente)
L'idea vincente per contrastare il livelock è quella
di spezzare le operazioni della ISR in due parti:
top half e bottom half.
Bottom Half (la funzione di gestione):
schedulata dalla top half per l'esecuzione in differita
(in un istante in cui il carico di lavoro sarà più basso).
opera ad interruzioni abilitate (l'arrivo di una Interrupt
Request può bloccarla).
opera sul buffer dati preparato dalla top half (copia in
user space, inserimento in liste, …).
32
opera in Kernel o Process Context.Perché la separazione è vincente?
(Le interruzioni sono spente per il più breve tempo possibile)
Rendendo breve la top half, le interruzioni sono
abilitate nuovamente nel più breve tempo
possibile.
→ I dispositivi possono “sparare” dati alla velocità più
elevata possibile.
Non appena finisce la “tempesta” di interruzioni, il
kernel elabora e consegna i buffer dati alle
applicazioni.
33Quando top e quando bottom
(Come suddividere le funzionalità di un gestore delle interruzioni)
Non esiste una ricetta univoca per scegliere quali
operazioni di gestione della interruzione vadano
gestite da top e quali da bottom half.
In generale, una funzione va eseguita nella top
half:
se è time-sensitive.
se opera direttamente con l'hardware.
se non svolge compiti che richiedono il blocco (ad
esempio, allocazione di memoria “con blocco”).
Tutto il resto va eseguito nella bottom half. 34Bottom half in Linux
(Una evoluzione lunga e dolorosa)
Il kernel Linux implementa lo schema di gestione
basato su top half e bottom half.
Esistono diverse implementazioni di bottom half,
risultato di anni e anni di tentativi, errori,
riscritture da zero, …
Bottom half originarie (BH), Task queue.
Softirq, tasklet.
Work queue.
Threaded Interrupt Handler.
Le bottom half sono eseguite ad IRQ abilitate. 35La bottom half originaria
(Non scala con il numero di CPU)
Adoperata In Linux ≤v2.2.
Array di 32 distinti puntatori a funzioni di gestione
(dischi, timer, tastiere, …).
Le funzioni eseguono in Interrupt Context; non possono
bloccarsi e non si può rischedulare un altro processo
(non esiste un PCB della traccia che esegue l'ISR).
Non si può invocare la schedule().
Locking molto rozzo: può eseguire una sola BH alla volta,
indipendentemente dal numero di CPU.
→ Problema: non scala col numero di CPU.
Meccanismo rimosso nel kernel 2.5. 36Task Queue
(Inefficiente in presenza di periferiche molto veloci)
Introdotta nella versione v2.2 del kernel.
La task queue è una coda di strutture rappresentanti
funzioni a invocare (estensione dinamica delle BH).
Le funzioni eseguono in Interrupt Context e non possono
bloccarsi (no schedule()).
Le funzioni sono inserite nella lista e sono eseguite una
dopo l'altra in occasioni ben definite (a seconda del tipo
di coda):
termine di una top half.
scadere di un timer.
Meccanismo rimosso nel kernel 2.3 poiché il driver
37
Ethernet non scalava con il numero di CPU.Task Queue
(Diagramma semplificato)
38Softirq
(Possono eseguire concorrentemente su diverse CPU)
Nel kernel v2.3 sono state introdotte le softirq, che hanno
rimpiazzato il meccanismo delle BH.
Array di 32 distinti puntatori a funzioni di gestione delle
bottom half (definiti staticamente dai programmatori).
Le softirq eseguono in Interrupt Context (no
schedule()); un processo server generato dal kernel
(ksoftirqd/n) esegue le funzioni su ogni CPU.
Una softirq schedulata su una CPU esegue su quella CPU.
Le softirq (anche uguali) possono essere eseguite
concorrentemente su una qualunque CPU. 39Tasklet
(Simili alle softirq; possono essere migrate su CPU diverse)
Nel kernel v2.3 sono state introdotte anche le tasklet.
Le tasklet usano l'infrastruttura delle softirq per
implementare una coda dinamica di funzioni schedulabili
Le tasklet eseguono in Interrupt Context (no
schedule()).
A differenza delle softirq, le tasklet possono eseguire su
una CPU diversa da quella che le ha schedulate (miglior
balancing).
Le tasklet (purché diverse) possono eseguire
concorrentemente su CPU diverse.
Tasklet e softirq coesistono. 40Workqueue
(Possono essere interrotte e ripristinate, migliorando la latenza dei processi)
Nella versione v2.6 del kernel sono state introdotte le
work queue. Una work queue è una coda dinamica di
funzioni schedulabili, destinata a rimpiazzare le tasklet.
A differenza delle tasklet, la work queue esegue in
Process Context. Il kernel crea un processo server con un
PCB (dal nome events/n), che esegue tutte le funzioni
della work queue assegnata alla CPU.
A differenza di un processo ordinario, la work queue non
può accedere allo user address space.
Tale processo può essere rischedulato, poiché ha un
proprio PCB (si può usare schedule() nelle funzioni
41
dentro la bottom half ).Threaded Interrupt Handler
(Si può modificare dinamicamente la priorità della BH)
Le tasklet possono provocare problemi di starvation ai
processi applicativi (eseguono a priorità più alta).
Le funzioni delle work queue sono gestite da un processo
server per CPU → possibili alte latenze per le funzioni in
coda.
→ Devastante nei sistemi real-time.
Nei kernel attuali, i processi di controllo di softirq, tasklet
e work queue generano un processo in Kernel Context
per ciascuna funzione da eseguire.
Si può modificare la priorità del processo (per favorire
alcune interruzioni rispetto ad altre). 42ACCESSO UNIFICATO AI DISPOSITIVI
43I protagonisti del sistema di I/O
(Dispositivo, bus, device driver)
Chi sono i protagonisti?
Il dispositivo fisico (a blocchi, a caratteri, di rete).
Il bus a cui il dispositivo è attaccato.
Il software che gestisce il dispositivo.
Tutti questi componenti hardware e software
devono essere gestiti in maniera uniforme.
Ricordate il motto: uno scheletro di codice che
invoca diverse funzionalità particolari a ciascun
dispositivo.
44Device driver
(Il software di gestione del dispositivo)
Il device driver (pilota del dispositivo) è un
componente software del kernel che gestisce un
dispositivo a basso livello.
Accende/spegne il dispositivo.
Attacca il dispositivo al sistema.
Esegue operazioni di controllo sul dispositivo.
Riceve le richieste dal file system e le traduce nelle
richieste al dispositivo.
Recupera le risposte dal dispositivo.
45Una periferica, più driver
(Un male necessario)
Ciascun device driver deve essere compatibile
con il sottosistema di I/O del kernel.
Tuttavia:
kernel diversi adottano strategie diverse di
comunicazione fra i diversi componenti del
sottosistema di I/O.
kernel diversi possono essere eseguiti su architetture
hardware diverse.
→ Per lo stesso dispositivo esistono più device
driver in circolazione, uno per ogni coppia (kernel,
architetura hardware) possibile. 46Un driver, più periferiche
(Tipico nei sistemi UNIX)
Lo stesso device driver può gestire una classe di
dispositivi simili.
Una serie di schede di rete dello stesso produttore.
Dischi rigidi con caratteristiche simili.
Schede seriali standard (UART).
Chiavette USB.
...
47Una visione unificata dell'I/O
(Uno scheletro, n implementazioni)
Il kernel definisce delle classi di dispositivi
idealizzate.
Disco, schermo, stampante, nastro, rete, …
Le classi sono implementate da componenti
generali, detti gestori, che definiscono il
comportamento atteso di un dispositivo di un
dato tipo, ovvero l'interfaccia d'uso.
Tutti i device driver devono aderire all'interfaccia del
relativo gestore.
I driver implementano il comportamento atteso (in
48
sostanza, i dettagli).Gli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Mode
Virtual File System
File System Accesso Networking
(operazioni su per Raw Controllo (connessione, invio e
I/O dispositivo
file e directory) blocchi ricezione messaggi)
EXT4 NTFS ISO9660 Disco Schermo Seriale PPP TCP/IP X.25
Block I/O Data Link Provider
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 49
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema
Il processo ls accede ai metadatiKernel
di
Mode
file e directory, in maniera strutturata.
Virtual File System
Il VFS individua il tipo di file system
File System Accesso corretto, che a sua Networking
volta effettua
(operazioni su per Raw Controllo (connessione, invio e
I/O richieste al dispositivo.
dispositivo Il gestore della
file e directory) blocchi ricezione messaggi)
classe di dispositivi a blocchi “Block
EXT4 NTFS ISO9660 Disco Schermo Seriale ottimizza
I/O” trasforma, PPP TCP/IP
ed inviaX.25al
Block I/O
device driver opportuno le richieste
Data Link Provider
del FS. Le risposte sono mantenute in
cache.
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 50
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Il processo mkfs accede al disco
Mode
attraverso
Virtual File System un file speciale
File System Accesso (/dev/sda1). L'accesso a tale file
Networking
Raw Controllo
(operazioni su per
I/O permette di leggere
dispositivo e scrivere
(connessione, invio e il
file e directory) blocchi dispositivo (qui, ricezione messaggi)
una partizione)
EXT4 NTFS ISO9660 Disco per blocchi,
Schermo Seriale saltando
PPP ilTCP/IP
file system.
X.25
In tal modo è possibile, per
Block I/O esempio, preparareData il Link
fileProvider
system
perail'uso
Interfaccia di accesso device(creazione
driver inode).
Disk CD Tape Display Comm. Wireless Ethernet 51
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Il processo oracle10 è un
Mode
database. Esso apre il file speciale
Virtual File System
File System Accesso della partizione /dev/sda1 Networking in
Raw Controllo
(operazioni su per
I/O modalità “raw I/O”;
dispositivo non invio
(connessione, vienee
file e directory) blocchi usato il file system ricezione
e nonmessaggi)
sono
EXT4 NTFS ISO9660 Disco mantenute
Schermo Seriale in cache
PPP le risposte.
TCP/IP X.25
L'organizzazione dei dati e il
Block I/O caching delle risposte Data Link Provider
sono a
carico
Interfaccia di accesso dell'applicazione.
ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 52
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Mode
Virtual File System
File System Accesso Networking
(operazioni su per Raw Controllo (connessione, invio e
I/O dispositivo
file e directory) blocchi ricezione messaggi)
EXT4 NTFS ISO9660 Disco Schermo Seriale PPP TCP/IP X.25
Block I/O Data Link Provider
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 53
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Mode
Virtual File System
File System Accesso Networking
(operazioni su per Raw Controllo (connessione, invio e
I/O dispositivo
file e directory) blocchi ricezione messaggi)
EXT4 NTFS ISO9660 Disco Schermo Seriale PPP TCP/IP X.25
Block I/O Data Link Provider
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 54
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Mode
Virtual File System
File System Accesso Networking
(operazioni su per Raw Controllo (connessione, invio e
I/O dispositivo
file e directory) blocchi ricezione messaggi)
EXT4 NTFS ISO9660 Disco Schermo Seriale PPP TCP/IP X.25
Block I/O Data Link Provider
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 55
drivers drivers drivers drivers drivers drivers driversGli “utenti” delle classi di dispositivi
(Alcuni esempi significativi)
ls mkfs oracle10 hdparm firefox
User
Chiamate Mode
di sistema Kernel
Mode
Virtual File System
File System Accesso Networking
(operazioni su per Raw Controllo (connessione, invio e
I/O dispositivo
file e directory) blocchi ricezione messaggi)
EXT4 NTFS ISO9660 Disco Schermo Seriale PPP TCP/IP X.25
Block I/O Data Link Provider
Interfaccia di accesso ai device driver
Disk CD Tape Display Comm. Wireless Ethernet 56
drivers drivers drivers drivers drivers drivers drivers“Implementare tutti i dettagli?”
(Che cosa significa?)
Il device driver:
mappa le operazioni standard delle classi nelle operazioni
particolari del dispositivo.
legge lo stato interno del dispositivo e lo traduce in una
descrizione generale da fornire al gestore della classe,
usabile nello “scheletro unico” di codice (VFS, gestore a
blocchi).
nasconde i comportamenti non rilevanti per gli utenti (ad
es., i tentativi di posizionamento della testina di un CD-
ROM).
coordina l'interazione fra dispositivo ed applicazione
(blocca l'applicazione se il dato è da leggere, la ripristina
57
se il dato è arrivato).“Implementare tutti i dettagli?”
(Che cosa significa?)
Il device driver incapsula, nel suo codice, tutti i
dettagli di accesso ottimizzato al dispositivo.
Per esempio, ad un disco conviene leggere un dato
quando è vicino alla testina.
Il device driver incapsula, nel suo codice, tutti i
dettagli di gestione degli errori.
Come gestire gli errori recuperabili (i noti
riposizionamenti della testina del CD-ROM).
L'applicazione non deve preoccuparsi di essi (al limite,
subisce un ritardo nei tempi di risposta).
58Distribuzione dei device driver
(Scrittura, test, distribuzione sotto forma di modulo user o kernel)
Prima di essere incluso in una distribuzione
software, un driver è soggetto a test rigorosi.
Funzionali, prestazionali, di sicurezza.
Tuttavia, spesso i device driver sono distribuiti
separatamente dal kernel (ad esempio, quando
sono scritti da terze parti).
Per tale motivo, i kernel moderni permettono ai
driver di essere inseriti a mo' di “plugin”.
Esecuzione in user mode.
Esecuzione in kernel mode, sottoforma di “moduli”
attivabili a tempo di esecuzione. 59UNIX: istanze dispositivi e file speciali
(Un dispositivo, più file speciali)
Come fare a distinguere due istanze di periferiche
appartenenti alla stessa classe?
Due dischi SATA distinti.
Un CD e un CD-RW.
Quattro partizioni distinte sullo stesso disco.
Si associa a ciascun dispositivo un file speciale,
contenuto nella directory /dev.
ls -l /dev/sda*, /dev/tty{1,2}
Tipo: carattere (c) o blocchi (b).
Major: identificativo del tipo di dispositivo.
60
Minor: identificativo dell'istanza di dispositivo.UNIX: accesso ai dispositivi
(Tramite un file speciale)
L'apertura di un file speciale ritorna un descrittore
di file aperto.
Il descrittore del file punta ad una struct
file_operations contenente le funzioni per:
la lettura/scrittura dei singoli blocchi o di un flusso di
caratteri dal/sul dispositivo.
l'eventuale riposizionamento dell'offset.
controllare il dispositivo.
L'interfaccia di accesso è uniforme. Il device driver
implementa le funzionalità offerte dalla struttura.61Creazione di file speciali
(Comando mknod)
In passato:
veniva svolta a mano, tramite il comando mknod.
mknod /dev/tty2 c 4 2
bisognava conoscere (o, peggio, assegnare senza
creare conflitti) major e minor del dispositivo.
Oggi:
svolta in automatico, tramite il processo server
di sistema udev.
udev riceve dal kernel messaggi riguardanti
l'inserimento e la rimozione di dispositivi.
→ udev crea e rimuove file speciali. 62UNIX: dispositivi a blocchi
(Disco: file speciale /dev/sda)
Dispositivi a blocchi: usati per contenere file
system.
Su dispositivi ad accesso random.
Gestione di più richieste concorrenti.
Stretta collaborazione con il gestore della
memoria virtuale (si interpella il disco se il dato
non è già nella cache centrale).
Accesso tramite apertura di un file speciale a
blocchi.
Per un disco rigido: /dev/sda, /dev/sda1 63
strings -a /dev/sda1UNIX: dispositivi a caratteri
(Disco: file speciale /dev/sda)
Dispositivi a caratteri: tutti i dispositivi che non sono in
grado di contenere un file system.
Possono essere strutturati per flussi (porta seriale) o per
record logici (mouse).
Possono fornire accesso solo sequenziale (porta seriale,
modem seriale) oppure anche random (frame buffer).
Accesso tramite apertura di un file speciale a caratteri.
Per un terminale testuale: /dev/tty1, /dev/vcs1
echo “testo” > /dev/vcs1
cat < /dev/vcs1
64UNIX: dispositivi di rete
(Nessun file speciale; invece, si usa una API)
Dispositivi di rete (Ethernet, Wireless): non sono acceduti
tramite l'apertura di un file speciale.
Configurazione e controllo: strumenti di rete
(ifconfig, route, …).
Letture e risposte: socket API (connect(), bind(),
listen(), accept(), sendmsg() o write(),
recvmsg() o read(), shutdown() o close())
Una connessione remota è identificata ancora da un
descrittore di file!
Vedrete tutto questo nei corsi successivi, non qui. 65Interfaccia unificata di accesso ai driver
(Tramite puntatori a funzioni raccolti in strutture dati)
Ciascun device driver è acceduto in maniera unificata,
attraverso puntatori a funzioni ben precise
(implementate nei driver stessi).
Chi invoca le funzioni del device driver?
Direttamente il VFS, in caso di dispositivo unico, non
appartenente a nessuna classe.
Altrimenti, il componente gestore della classe di
dispositivi di cui fa parte il driver.
Il gestore accede al driver per due motivi.
Per conto di una chiamata di sistema.
Per aggiornare lo stato del dispositivo nel contesto
della classe di cui fa parte. 66I gestori di base dei dispositivi in Linux
(Diagramma semplificato)
Chiamate di sistema
Char ALSA Frame V4L TTY Block
driver core buffer core core layer
core
ALSA Frame V4L TTY Serial Block SCSI
driver buffer driver driver core driver core
driver
Serial libata USB
I gestori delle classi di dispositivi sono gli driver storage
“scheletri unici” che contattano i device
driver. SATA driver
67Quali funzioni esporta il device driver?
(Driver a caratteri semplice in nessuna classe di dispositivi)
/dev/mem: memoria dell'intero sistema.
Questo dispositivo a caratteri esporta una interfaccia di
(poche) funzioni contenuta in una struct
file_operations.
http://lxr.linux.no/#linux+v3.6.5/drivers/char/mem.c#L745
L'applicazione invoca la read() da /dev/mem; il VFS
invoca direttamente read_mem().
68Quali funzioni esporta il device driver?
(Driver a caratteri appartenente ad una classe di dispositivi)
/dev/fb0: frame buffer.
Il frame buffer è un'area di memoria in cui viene
“disegnato” uno schermo.
Questo dispositivo è molto complesso.
Impostazione della risoluzione video e dei colori, disegno
di un cursore, …
Di frame buffer ne possono esistere tanti (dual screen,
X11, console testuali, …).
Ogni scheda video ha i suoi dettagli implementativi.
La struct file_operations non è in grado di
descrivere tutti questi scenari. 69Quali funzioni esporta il device driver?
(Driver a caratteri appartenente ad una classe di dispositivi)
Ogni frame buffer device driver esporta una interfaccia di
funzioni contenuta in una struct fb_ops.
http://lxr.linux.no/#linux+v3.6.5/include/linux/fb.h#L633
fb_open(), fb_read(), fb_cursor(), …
Il gestore “frame buffer core” fornisce una astrazione
unificata di ciascuna istanza di dispositivo frame buffer in
esecuzione.
Usa una struct fb_info, preparata dal device driver
in fase di inizializzazione.
http://lxr.linux.no/#linux+v3.6.5/include/linux/fb.h#L844
La struct fb_info contiene un puntatore alla
struct fb_ops del device driver relativo. 70Quali funzioni esporta il device driver?
(Driver a caratteri appartenente ad una classe di dispositivi)
L'applicazione (server grafico) invoca una operazione
su /dev/fb0.
ioctl() è un “salvagente” che permette di invocare
tutte quelle operazioni altrimenti non esprimbiili in
termini di read(), write(), seek(), …
La struct file_operations per i dispositivi di tipo
frame buffer è definita qui:
http://lxr.linux.no/#linux+v3.6.5/drivers/video/fbmem.c#L1480
La read() su /dev/fb0 si trasforma in una
invocazione di fb_read(). 71Quali funzioni esporta il device driver?
(Driver a caratteri appartenente ad una classe di dispositivi)
La fb_read() è definita qui:
http://lxr.linux.no/#linux+v3.6.5/drivers/video/fbmem.c#L740
Identifica la struct fb_info dell'istanza di
frame buffer in esecuzione.
Invoca il metodo fb_read() della struct
fb_ops puntata dalla struct fb_info.
72Quali funzioni esporta il device driver?
(Driver a blocchi gestito dal block layer)
Il block layer:
individua le pagine di memoria coinvolte nella
richiesta. Se le pagine sono già in memoria, le ritorna.
Altrimenti, programma una lettura in avanti
(readahead) di 128KB.
traduce le richieste di pagine in “richieste generiche”
di I/O.
traduce le richieste generiche di I/O in richieste al
dispositivo.
sottomette le richieste al dispositivo.
73Quali funzioni esporta il device driver?
(Driver a blocchi gestito dal block layer)
Ciascun dispositivo a blocchi esporta una interfaccia di
funzioni contenuta in una struttura dati di tipo
struct block_device_operations.
http://lxr.linux.no/#linux+v3.6.5/include/linux/blkdev.h#1406
Definisce come aprire, chiudere, controllare (ioctl())
ed accedere direttamente ad un settore del dispositivo.
Ad esempio, per un disco SATA/SCSI:
http://lxr.linux.no/#linux+v3.6.5/drivers/scsi/sd.c#L1338
74Quali funzioni esporta il device driver?
(Driver a blocchi gestito dal block layer)
Se l'accesso avviene tramite il file system, il VFS usa le
funzioni contenute nelle struct file_operations
che il file system definisce per file e directory.
Ad esempio, per il file system EXT2:
Directory
http://lxr.linux.no/#linux+v3.6.5/fs/ext2/dir.c#L724
File
http://lxr.linux.no/#linux+v3.6.5/fs/ext2/file.c#L63
75Quali funzioni esporta il device driver?
(Driver a blocchi gestito dal block layer)
Se l'accesso avviene tramite file speciale (/dev/sda), il
VFS usa le funzioni contenute nella struct
file_operations fornita dal block layer.
http://lxr.linux.no/#linux+v3.6.5/fs/block_dev.c#L1624
In entrambi i casi (accesso via file system o via file
speciale), la lettura dei dati avviene tramite la funzione
do_sync_read().
76Puoi anche leggere

















































