Il Progetto EUCLID: Camera di "Visible Imaging" (VIS) e Trasformata di Hough - Infn
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
UNIVERSITÀ DEL SALENTO
Dipartimento di Matematica e Fisica ”E. De Giorgi”
Corso di Laurea in Fisica
Tesi di Laurea
Il Progetto EUCLID: Camera di ”Visible Imaging”
(VIS) e Trasformata di Hough
The EUCLID Project: Visible Imaging Channel (VIS) and
Hough Transform
Relatore: Laureando:
Dott. Achille A. Nucita Serena Maria Lezzi
Correlatore:
Dott. Francesco Strafella
Anno Accademico 2018/2019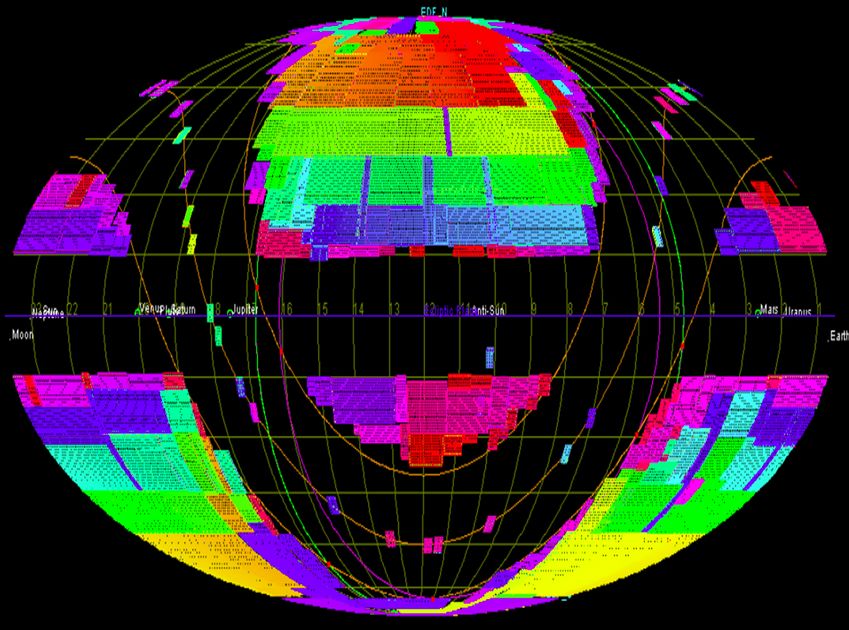
Indice
Introduzione 3
1 Il progetto EUCLID 4
1.1 Un Universo oscuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Obiettivi Scientifici della missione: le domande chiave . . . . . . . . . . . . . . . . . . . 5
1.3 Analisi della Missione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.1 Il lancio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.2 Osservazione del campo d’indagine . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.3 L’esplorazione di Euclid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.4 Strategia di Osservazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Payload 13
2.1 Descrizione del telescopio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Dicroico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1 Studio di tolleranza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Coefficienti di Riflessione e Trasmissione: formazione dei ghost . . . . . . . . . 17
2.2.3 Al di là del dicroico: l’Assemblaggio Opto-Meccanico del NISP (NI-OMA) . . . 21
3 Camera di Visibile Imaging (VIS) 23
3.1 Descrizione funzionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.1 Gruppo del Piano Focale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1.2 Otturatore VIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.3 Unità di calibrazione VIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1.4 Unità elettroniche: VI-CDPU e VI-PMCU . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Elementi critici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 La Trasformata di Hough 29
4.1 Trasformata Lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Le Basi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.2 Dalle linee ai punti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.3 Dai punti alle linee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.4 Forma Normale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1.5 Implementazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Trasformata Circolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.1 La parametrizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1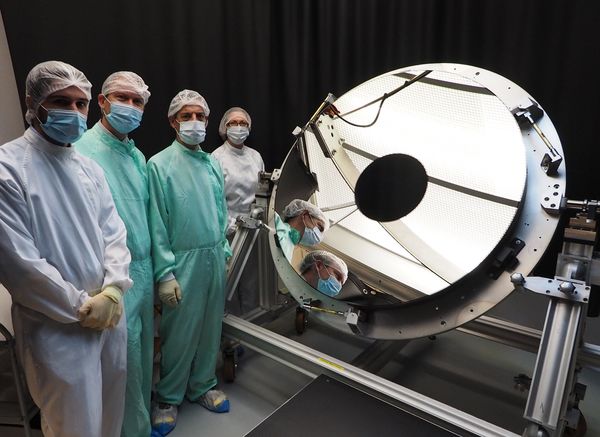
4.2.2 Assumendo di conoscere R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.3 Quando R non è conosciuto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5 SSO-PIPELINE 36
5.1 Immagini grezze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2 Il codice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2.1 Sequenza di passaggi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.3 Studio sulla variabilità dei parametri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.3.1 Raggio dei ghost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.3.2 Kernel Gaussiano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3.3 FdM: il Fattore della Media . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3.4 Threshold: soglia del parametro di accumulazione . . . . . . . . . . . . . . . . . 44
Conclusioni 46
Bibliografia 47
Acronimi 48
2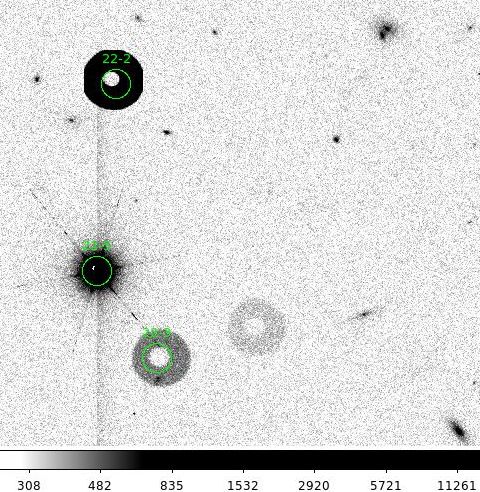
Introduzione
Euclid è una missione di Classe Media del programma dell’ESA ”Cosmic Vision 2015-2025” che dovrà
realizzare, attraverso un’indagine sull’evoluzione delle strutture cosmiche, una mappa della geometria
dell’Universo oscuro, esaminando l’intero periodo, iniziato 5 miliardi di anni fa, durante il quale l’ener-
gia oscura ha svolto un ruolo significativo nell’accelerare l’espansione dell’Universo.
L’obiettivo di questa tesi, quindi, è lo studio della missione spaziale Euclid, con un approfondimento
sul percorso intrapreso da un fascio di luce entro il telescopio.
Il Capitolo 1 farà una panoramica del Progetto Euclid, focalizzandosi poi sugli obiettivi scientifici, il
design operativo e la strategia di osservazione della missione.
Il Capitolo 2 descriverà il Payload del veicolo spaziale, costituito dal telescopio ottico e dai 2 strumenti
VIS e NISP. In particolare, in questo capitolo ci si interesserà del design ottico, in cui figura il Beam
Splitter-Full Dielectric (BS-FD), il dicroico del telescopio, componente indispensabile dell’intera opera-
zione.
Il Capitolo 3 approfondirà, invece, la Camera VIS, piano focale dell’ottica nella banda del visibile.
Il Capitolo 4 tratterà teoricamente la Trasformata lineare e circolare di Hough, metodo matematico in
grado di identificare oggetti come linee e cerchi in un’immagine binaria. Una delle sue possibili appli-
cazioni consiste nell’individuare, nelle immagini del cielo stellato, prodotte ad esempio dalla Camera
VIS, alcune strutture note come ghost, riflessi creati dal dicroico che devono essere eliminati per poter
ottenere delle immagini scientifiche.
Nel Capitolo 5, quindi, si testerà l’efficienza di un software informatico in stato di sviluppo e verifica
presso l’ESA: questo software, scritto su Python, effettua una serie di operazioni, tra le quali la Tra-
sformata di Hough, per rendere utilizzabili i dati grezzi restituiti dal satellite. Inoltre, si effettuerà uno
studio sulla variabilità dei parametri del codice per verificare che i valori scelti per questi parametri
siano effettivamente quelli che rendono massima l’efficienza del codice stesso.
3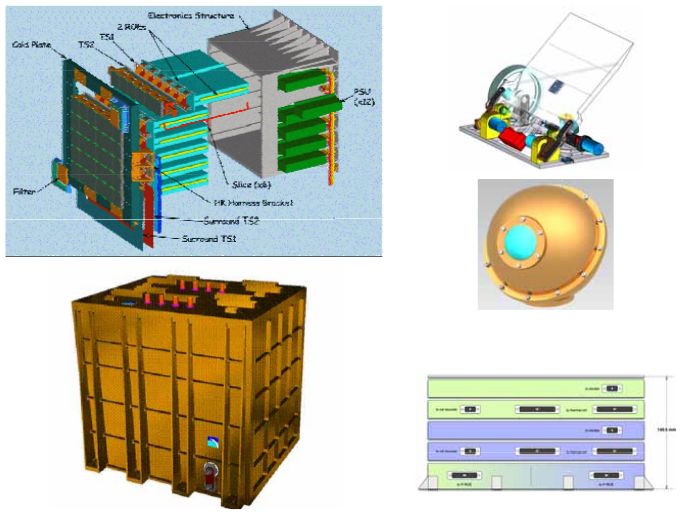
Capitolo 1
Il progetto EUCLID
La nostra visione dell’Universo è cambiata radicalmente durante il secolo scorso: meno di cento anni fa si
credeva che l’Universo consistesse solo nella nostra galassia. La scoperta dell’espansione dell’Universo
da parte di Edwin Hubble e la successiva presa di coscienza che l’Universo è molto antico ed ha avuto
un inizio, sono le maggiori conquiste dell’Astronomia che hanno cambiato, sopra tutto, la nostra visione
del posto che l’umanità occupa nell’Universo.
Ad oggi, tuttavia, il quadro teorico si basa sull’esistenza di due componenti la cui natura è del tutto
sconosciuta: infatti, circa il 76% della densità complessiva di energia e massa nell’Universo è sotto forma
di energia oscura, causa dell’accelerazione dell’Universo stesso. Un altro 20% è sotto forma di materia
oscura non barionica, che esercita un’attrazione come materia normale, ma che non può emettere o
assorbire la luce.
1.1 Un Universo oscuro
Tra queste 2 componenti misteriose del modello di concordanza, la materia oscura è la più familiare.
La prova della sua esistenza risale agli anni ’30, quando Fritz Zwicky si rese conto che la massa dina-
mica dell’ammasso Coma superava quella prevista dalla luminosità delle sue galassie, suggerendo una
componente dominante non luminosa. Varie linee di evidenza supportano fortemente una natura non
barionica per la particella di materia oscura e diversi candidati plausibili sorgono nelle estensioni del
Modello Standard.
In RG, l’energia oscura, invece, viene associata ad una costante cosmologica Λ, un semplice termine
additivo nelle equazioni di Campo di Einstein1 , considerato come la causa dell’espansione accelerata
1
Le equazioni di Campo della Relatività Generale:
1 8πG
Rjk − Rgjk + Λgjk = 4 Tjk
2 c
dove:
• Rjk è il Tensore di Ricci
• R = Rjk Rjk è la curvatura scalare
• gjk è il tensore metrico
• Tjk è il tensore energia-impulso
4
dell’Universo.
Inserendo la metrica FRW2 nelle equazioni di Campo di Einstein si ottiene l’equazione:
3p R(t) Λ
R̈(t) = −4πG ρ + 2 + R(t)
c 3 3
dove R(t) è il fattore di scala, che racchiude la fisica dell’espansione dell’Universo, G è la costante
gravitazionale, ρ è la densità di massa inerziale totale che, per l’equivalenza tra massa ed energia, tiene
conto del contributo di materia e radiazione, p è la pressione associata, c è la velocità della luce.
In un Universo con costante cosmologica diversa da zero, da questa equazione si ottiene che l’Universo
può essere caratterizzato da un’espansione accelerata se
ρ + 3p/c2
ρΛ >
2
dove ρΛ è la densità di energia oscura. Poichè ρΛ è costante nel tempo mentre la densità di materia e
radiazione decrescono durante l’espansione dell’Universo, è naturale che l’energia oscura inizi a domi-
nare in una certa fase dell’evoluzione dell’Universo (figura 1.1). Difatti, nel 1998, a seguito di misurazioni
effettuate su supernove di tipo Ia, si scoprı̀ che l’Universo si sta espandendo in maniera accelerata.
La costante cosmologica, tuttavia, potrebbe essere interpretata come ”l’energia del vuoto dello spa-
zio vuoto” che, come afferma l’ampiamente sperimentata teoria dei campi quantistici, produce particelle
e antiparticelle virtuali che si annichilano in fotoni virtuali: quindi anche il vuoto contiene energia. Se
questo è il caso, il problema nasce quando si tenta di calcolare il valore della costante cosmologica: la
differenza tra il valore osservato di questa costante e ciò che la teoria prevede è considerata la peggiore
previsione nella storia della fisica.
Ciò implica che o la costante cosmologica non è la descrizione corretta dell’oscurità dell’energia, la-
sciando aperta la possibilità a modelli più esotici, o che un cambiamento radicale nelle nostre più
fondamentali teorie della fisica, Meccanica Quantistica e RG, è all’ordine del giorno.
Per risolvere questo puzzle, che minaccia una potenziale crisi nella fisica fondamentale, ci sono
molte idee, che vanno dall’includere campi aggiuntivi al rivedere persino la nostra teoria della gravità.
Risulta chiara, allora, la necessità di migliorare la qualità e la quantità dei dati osservativi per affrontare
lo studio di questo problema: i progressi cercati richiedono misurazioni di alta precisione che possono
essere ottenute solo da una missione spaziale dedicata ed Euclid è stato concepito proprio per rispondere
a queste esigenze.
1.2 Obiettivi Scientifici della missione: le domande chiave
Euclid sarà in grado di affrontare le seguenti domande chiave sul lato oscuro del Universo:
1. Energia oscura dinamica: l’energia oscura è semplicemente una costante cosmologica o è un
campo che si evolve dinamicamente con l’espansione dell’Universo?
2
La metrica FRW di Friedman, Robertson e Walker:
h dr2 i
ds2 = c2 dt2 − R(t)2 + r 2
(dθ 2
+ sinθ 2
dφ2
)
1 − kc2
dove k è un parametro che può assumere valore -1, 0 o 1, in corrispondenza di una geometria rispettivamente a sella di
cavallo, euclidea o sferica.
5
Figura 1.1: Storia dell’espansione dell’Universo: in seguito all’inflazione cosmica, l’espansione esponenziale
avvenuta nell’intervallo tra 10−44 e 10−34 s dopo il Big Bang, l’Universo ha continuato ad espandersi decele-
rando, fino a 5 miliardi di anni fa, quando l’espansione ha invece iniziato ad accelerare. Questa inversione
di rotta, dimostrata dal cambio di concavità nella curva in figura, è stata provocata dal prevalere della
densità di energia oscura ρΛ sulla densità di materia e radiazione, in diminuzione a causa dell’espansione
dell’Universo.
2. Modifica della gravità: in alternativa, l’apparente accelerazione è invece una manifestazio-
ne di una rottura della Relatività Generale sulle scale più grandi, o un fallimento delle ipotesi
cosmologiche di omogeneità e isotropia?
3. Materia oscura: che cos’è la materia oscura? Qual è la scala di massa assoluta del neutrino e
qual è il suo numero di specie relativistiche nell’Universo?
4. Condizioni iniziali dell’Universo: qual è lo spettro di potenza delle fluttuazioni della densità
primordiale che ha seminato struttura su larga scala? Rispondere a questa domanda ci permetterà
di migliorare la nostra comprensione della fisica che ha causato l’inflazione e limitare le ipotesi
sulle condizioni iniziali nell’Universo.
Per rispondere a queste domande, le operazioni che Euclid intraprenderà consisteranno nel:
• mappare direttamente la distribuzione della materia oscura nell’Universo catturando l’immagi-
ne di 1,5 miliardi galassie: le proprietà statistiche di queste distribuzioni limiteranno diverse
proprietà della materia oscura stessa e dei neutrini
• studiare la storia dell’espansione e l’evoluzione delle strutture cosmiche, misurando per 1,5 miliar-
di di galassie forme e spostamenti verso il rosso con z ∼ 2, equivalente a un tempo di osservazione
di 10 miliardi di anni indietro rispetto al nostro tempo
• osservare3 , contemporaneamente nello spettro visibile e NIR, 15.000 deg 2
3
Sapendo che 1rad ' 57deg e che l’angolo solido totale Ω vale 4π, allora:
Ω = 4πsr = 4π(rad)2 ' 4π(57deg)2 ' 40000deg 2
Pertanto, Euclid, con i suoi 15000 deg 2 , osserverà più di un terzo del cielo extra-galattico.
6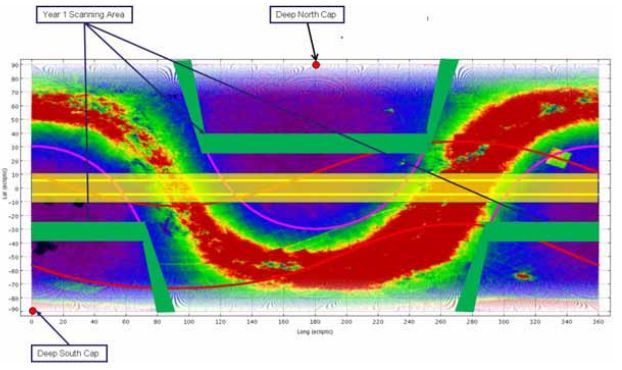
• determinare la distribuzione statistica delle fluttuazioni della densità primordiale con elevata pre-
cisione su scale che non possono essere sondate usando le osservazioni della radiazione di fondo
cosmico
Successivamente, verranno avviati due esperimenti cosmologici, il Galaxy Clustering (GC) e il Weak
gravitational Lensing (WL), che sfrutteranno i dati raccolti da Euclid e forniranno un cruciale controllo
incrociato di effetti sistematici, essenziali a questi livelli di precisione.
1.3 Analisi della Missione
In questa sezione verranno analizzati i seguenti punti di snodo operativi della missione:
Lancio
Osservazione del campo d’indagine
Esplorazione di Euclid
Strategia di Osservazione
1.3.1 Il lancio
La navicella spaziale Euclid sarà lanciata dal Guiana Space Center, a Kourou, a bordo di una Soyuz ST
2.1-B. La data e le condizioni di lancio determineranno l’ellitticità e le dimensioni dell’orbita operativa,
influenzando anche l’angolo SSE (Sun Spacecraft Earth) e la visibilità giornaliera dalla stazione di terra.
Il lancio è possibile in quasi tutti i giorni dell’anno con restrizioni minori per evitare le eclissi durante
il trasferimento e in orbita operativa.
Un’orbita di grande ampiezza intorno al punto 2 di Lagrange Sole-Terra (SEL2) è stata selezionata perché
impone vincoli minimi sulle osservazioni e consente l’osservazione del cielo al di fuori della latitudine
galattica b = ± 30 attorno alla Via Lattea durante l’intera durata della missione.
1.3.2 Osservazione del campo d’indagine
La sequenza elementare di osservazione di un campo è composta da quattro fotogrammi (f rame) per
un’area di campo visivo di 0, 54 deg 2 . Durante ogni fotogramma, gli strumenti VIS e NISP eseguono
simultaneamente esposizioni del cielo. Al fine dell’ultimo fotogramma, viene eseguita una rotazione
(slew) verso il campo successivo.
Per ogni frame, i tempi di integrazione sono (figura 1.2)4 :
4
Bande di osservazione del NISP:
Per spettroscopia 1100-2000 nm
Banda Y 920-1146 nm
Banda J 1146-1372 nm
Banda H 1372-2000 nm
7
Tempo di integrazione
VIS 590 s
NISP 590 s (spettroscopia)
88 s Banda Y
90 s Banda J
54 s Banda H
Nei primi 610s sia VIS che NISP acquisiscono dati per WL e spettroscopia. Successivamente, a causa
delle vibrazioni che disturbano l’immagine causate dalla rotazione della ruota del filtro (NISP-FWA), la
camera VIS ha l’otturatore (shutter) chiuso durante le esposizioni rimanenti prese per imaging NIR.
Figura 1.2: Linea temporale della sequenza di osservazione di un campo. Ogni fotogramma (blu) inizia con
una esposizione simultanea nel VIS e NIS, seguita da tre esposizioni fotometriche NISP. I tre dither tra un
frame e un altro e lo slew tra un campo e un altro sono contrassegnati in rosso. Le allocazioni temporali
per l’otturatore (shutter) VIS e i movimenti dell’assemblaggio della ruota del filtro (FWA) sono indicati.
Ogni fotogramma della sequenza elementare è intervallato da una fluttuazione spaziale del telescopio,
cioè uno spostamento di puntamento (dithering): la strategia di dithering copre gli intervalli temporali
tra i rivelatori, mitiga l’impatto dei raggi cosmici sui dati scientifici e consente di osservare anche gli
oggetti celesti che non sono visibili poichè proiettati negli spazi intervallari tra le CCD della Camera
VIS, migliorando cosı̀ il campionamento delle immagini.
I tempi di riferimento necessari sono:
dithering 64s (*)
slew 280s (*)
(*)Questi valori sono soggetti a modifiche in base alle valutazioni industriali.
Questi spostamenti di puntamento sono stati ottimizzati per quanto segue:
Dither 1 −→ ∆X: 100 ”, ∆Y: 50”
Dither 2 −→ ∆X: 100 ”, ∆Y: 0”
Dither 3 −→ ∆X: 100 ”, ∆Y: 0”
8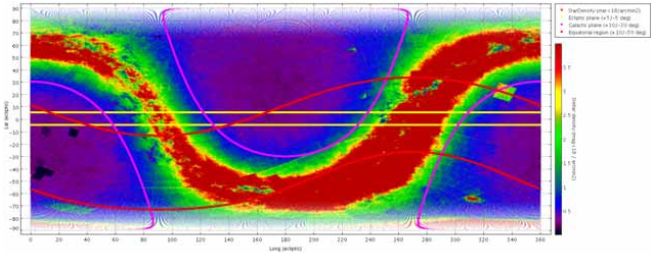
1.3.3 L’esplorazione di Euclid
Una volta nella posizione Sole-Terra L2, Euclid eseguirà l’ampia osservazione richiesta di 15.000 deg 2
con W ide Survey ed il Deep Survey entro 6 anni.
Figura 1.3: Area designata (verde) per la fase di routine dell’anno 1.
Il primo anno è il più impegnativo in termini di quantità e frequenza delle calibrazioni (nane bianche,
nebulose planetarie, densi campi stellari), che saranno ridotte durante il resto della missione.
Wide Survey (WS)
Il Wide Survey è il sondaggio principale, che coprirà circa 15.000 deg 2 di cielo extragalattico (|b| > 30
deg) ad una profondità tale da osservare circa 30 galassie per arcmin2 .
Ciò è ottenuto dai tempi di esposizione considerati nella sezione precedente.
Il cielo osservato nel WS è il cielo più scuro, cioè privo di contaminazione della luce della nostra galassia
e del nostro sistema solare, e rappresenta il nucleo della missione.
Deep Survey (DS)
Il DS è costruito osservando ripetutamente la stessa area nel cielo nella modalità di osservazione di
WS, con lo scopo principale di ottenere la calibrazione dei dati del WS, ma estendendo anche l’ambito
scientifico della missione allo studio di galassie con un alto spostamento verso il rosso, quasar e AGN.
La sequenza osservativa consiste nel puntare verso due campi separati, ciascuno di 20 deg 2 , nell’emi-
sfero celeste settentrionale e meridionale, vicino al NEP (Polo Nord dell’Eclittica) e vicino al SEP (Polo
meridionale dell’Eclittica) (figura 1.4).
In questo modo vengono evitate aree di elevata estinzione e l’orientamento del campo sarà diverso a
seconda della posizione annuale del satellite intorno al Sole: questo è un vantaggio perché permette di
ottenere le calibrazioni fotometriche attraverso un’ampia gamma di angoli di rotazione.
Il cielo coperto dai due sondaggi è mostrato nella figura 1.5. Ogni osservazione VIS e NISP viene
9Figura 1.4: A sinistra: Northern Deep Field proiettato su una mappa di estinzione del cielo. A destra:
Southern Deep Field.
Figura 1.5: Cielo coperto da Euclid al completamento della missione (6 anni) in coordinate eclittiche - Con-
sorzio Euclid / ESA / Science Survey Working Group.
Le aree colorate sono i campi di cielo osservati da Euclid. Ogni colore rappresenta un anno intero di osser-
vazione. Le 6 regioni colorate sono composte da un mosaico di tessere di 0,54 deg 2 (FoV condiviso). I campi
isolati sparsi sui piani galattici sono campi di calibrazione.
10completata su un determinato campo prima di spostarsi sul campo adiacente successivo. Euclid può
quindi osservare una lunga striscia di circa 10-20 deg al giorno, fornendo mediamente cerotti di 400
deg ogni mese. Ogni 6 mesi il telescopio verrà puntato nella direzione opposta per rilevare nell’altro
emisfero.
1.3.4 Strategia di Osservazione
La strategia di indagine è determinata dai seguenti elementi:
• Stabilità: la qualità dell’immagine dipende dalle deformazioni termoelastiche del carico utile.
Queste deformazioni sono indotte da variazioni nell’illuminazione del veicolo spaziale da parte
del sole. Definiamo l’Angolo di Aspetto Solare (AAS) come l’angolo tra il raggio del satellite e la
direzione satellite-sole. In base alla progettazione, a quest’angolo è permesso di variare tra 90 e
120 deg. Le sue variazioni possono causare variazioni significative nella distanza tra lo specchio
primario e secondario, degradando cosı̀ la qualità dell’immagine, e, pertanto, possono richiedere
tempi dedicati di stabilizzazione e caratterizzazione dell’immagine.
La strategia di indagine mira a ridurre al minimo queste variazioni durante l’intera missione al
fine di garantire la qualità dei dati grezzi.
• Osservazioni specifiche sulla calibrazione dei punti: osservazioni di nane bianche e nebulose
planetarie nelle regioni ad alta densità stellare devono essere performate regolarmente durante la
missione, con impostazioni simili a quelle del WS. Esse sono, infatti, fonti di calibrazione scientifi-
ca delle linee spettrali dei campioni spettroscopici, e le aree devono essere osservate ripetutamente
per cercare variazioni sistematiche su un lungo periodo di tempo.
• Sfondo del cielo: la luce di una sorgente di fondo luminosa si disperde nelle particelle di polvere
interstellare. Questa dispersione è più alta nel piano dell’eclittica e diminuisce verso i poli dell’e-
clittica. La strategia di sondaggio dà, quindi, maggiore priorità alle regioni con latitudine eclittica
più elevata.
Inoltre, stelle con mFigura 1.6: Mappa del cielo delle densità stellari proiettata in coordinate eclittiche che indica le regioni più
adatte per l’indagine da parte di Euclid: regioni con latitudine galattica |b| > 30 deg e regioni con latitudine
eclittica |b| > 5 deg.
L’efficienza nel coprire nuove aree diminuisce con il progredire della missione, poiché le parti non ancora
osservate del cielo hanno una visibilità inferiore. Nelle ultime fasi delle osservazioni, ciò introduce periodi
di inattività durante l’attesa affinché regioni specifiche diventino visibili. La possibilità di utilizzare questo
tempo per altri scopi dipende dalla quantità di propellente disponibile per la rotazione.
12Capitolo 2
Payload
I requisiti scientifici finora descritti suggeriscono una soluzione di payload con un telescopio di apertura
1,2 m insieme a due strumenti: il Visual Imager (VIS) e lo Spettrometro e Fotometro nel vicino infrarosso
(NISP). Il primo fornisce immagini visibili di alta qualità a banda larga per eseguire le misurazioni di WL
delle galassie, con un controllo squisito degli errori sistematici, mentre il secondo è capace di fornire
misurazioni spettroscopiche e fotometriche nel NIR. Usando un dicroico per dividere la luce incidente,
questi 2 strumenti, che condividono l’ampio campo visivo comune di 0.54 deg 2 , possono essere azionati
contemporaneamente.
Questo Capitolo analizzerà nel particolare le funzionalità del design ottico, cercando di evidenziare il
percorso della luce dopo l’incontro con il Beam Splitter-Full Dielectric (BS-FD).
2.1 Descrizione del telescopio
Il telescopio deve fornire un’eccellente qualità di imaging sia nel canale visibile sia nel vicino infrarosso.
Due telescopi a specchio non offrono una qualità d’immagine sufficientemente buona per l’ampio campo
visivo di Euclid. L’alternativa consiste in una configurazione a 3 specchi, con i quali ci sono abbastanza
gradi di libertà1 per ottenere bassa distorsione, la scala dell’immagine richiesta ed un buon livello di
correzione dell’aberrazione (quasi immagini limitate dalla sola diffrazione).
Uno schema del progetto ottico risultante è riportato nella Figura 2.1. Il telescopio ha una configurazio-
Figura 2.1: Vista in scala del telescopio di Euclid. Lo strumento NISP, posto dal lato di trasmissione del
dicroico, non viene mostrato.
ne Korsch con 3 specchi, con una regione di buio sullo specchio primario M1 in corrispondenza del cono
1
tre curvature, tre costanti coniche e due distanze tra gli specchi
13d’ombra dello specchio secondario M2. Il diametro dello specchio principale è di 1,2 m e la lunghezza
focale è di 24,5 m.
L’interfaccia tra il VIS e il telescopio è il piano focale, mentre l’interfaccia tra il telescopio ed il NI-
SP è il BS-FD, un dicroico che si trova sulla pupilla di uscita del telescopio per separare i canali ottici:
l’uscita riflessa dal dicroico va al VIS e l’uscita trasmessa va al NISP.
Per raggiungere gli obiettivi di prestazione scientifica, gli strumenti devono funzionare a temperatu-
ra ridotta: la temperatura massima del telescopio è stata determinata a ∼ 240 K.
Il telescopio è progettato sui concetti di esapode e capriata (figura 2.2):
Figura 2.2: Architettura meccanica del telescopio. Il banco ottico supporta M1. Inoltre, l’esapode con M2 e
l’altra ottica del telescopio con gli strumenti si trovano ai due lati opposti di esso.
• La parte superiore del banco ottico supporta M1 e la struttura che regge M2.
• La parte inferiore del banco ottico supporta l’altra ottica del telescopio (figura 2.13) e gli strumenti
VIS e NISP.
• 6 supporti, uniti in una forma esagonale, collegano lo specchio secondario M2, montato su un
telaio, al banco ottico dello specchio primario M1.
Le prestazioni ottiche del telescopio sono fortemente sensibili alla distanza tra M1 ed M2: difatti, lo
specchio secondario M2 è integrato su un meccanismo che può correggere disallineamenti dopo il lan-
cio e mettere a fuoco in seguito ad eventuali cambiamenti termici.
Per ridurre la radiazione proveniente dal Sole si è optato per uno schermo solare su cui sono montate
delle celle per la produzione di corrente elettrica.
142.2 Dicroico
Realizzata in vetro con silice fusa di alta qualità, la piastra dicroica di Euclid ha un diametro di 117 mm e
divide spettralmente la radiazione in entrata che raggiunge il telescopio nelle componenti visibile e NIR.
Pertanto, la separazione avviene intorno a 930 nm: un minimo del 97% della componente visibile viene
riflessa sulla superficie d’impatto del filtro fino a raggiungere lo strumento VIS ed un minimo del 95%
della componente NIR viaggia attraverso il filtro per incontrare lo strumento NISP. L’angolo operativo
d’incidenza è limitato all’intervallo [0°;18°].
Il BS-FD include un rivestimento dicroico, progettato per garantire un livello molto basso di riflessione
Figura 2.3: Schema ad albero del filtro dicroico
anche nell’intervallo di lunghezze d’onda del blu ([400;500](nm)) (questo per ridurre al minimo la quan-
tità di luce blu che verrebbe riflessa verso lo strumento VIS), un rivestimento antiriflesso ed uno strato
spesso di SiO2 , depositato tra il substrato di silice ed il rivestimento antiriflesso, al fine di compensare
la curvatura causata dal rivestimento dicroico (figura 2.4).
Figura 2.4: Schema del filtro dicroico con strategia di compensazione della curvatura
L’ultimo progetto, approvato a seguito di numerose analisi, prevede che il rivestimento dicroico sia
composto da 2 diversi materiali, con uno spessore globale di 8,07 µm e 86 strati. Anche il rivestimento
antiriflesso suggerito è realizzato con gli stessi 2 materiali del rivestimento dicroico, per uno spessore
globale di 3,66 µm (strato di SiO2 di compensazione della curvatura non incluso) e 52 strati.
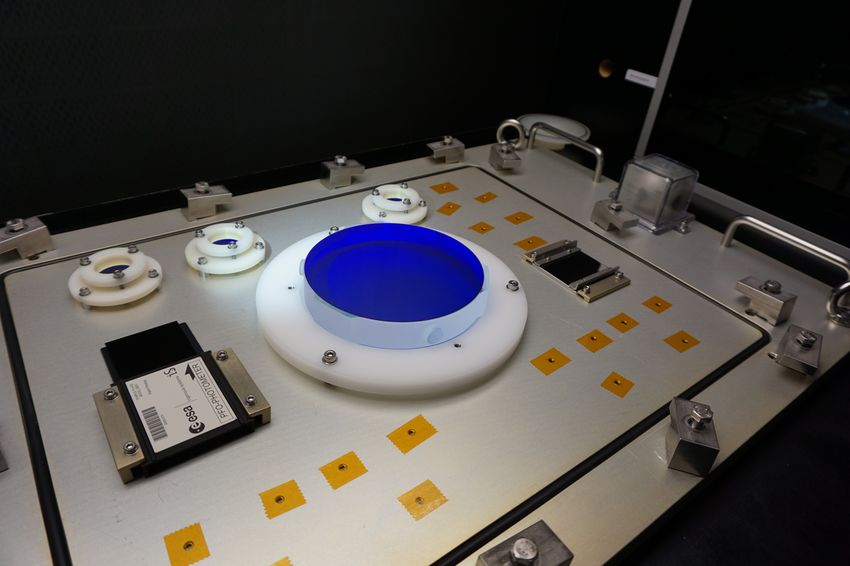
15Figura 2.5: A sinistra: specchio primario M1. A destra: un modello degno di volo del filtro dicroico, pronto
per la consegna ad ”Airbus Defence & Space”, prima dell’integrazione nel suo montaggio finale. Il dicroico
è stato testato da ”Optics Balzers Jena GmbH” per la riflettanza e la trasmittanza spettrali: quanta luce in
entrata viene riflessa e quanta viene trasmessa per le varie bande di lunghezza d’onda.
Quando una fonte di luce bianca viene posta sopra il dicroico, ciò che vediamo sotto di esso è la por-
zione di luce che viene trasmessa attraverso il vetro per essere diretta verso lo strumento NISP: questa
è costituita da luce blu e da radiazione nel vicino infrarosso. Essendo quest’ultima invisibile agli occhi
umani, il risultato della visione dicroica in trasmissione è proprio la tonalità di blu intenso che si nota
in figura 2.5.
Se guardato dal lato di riflessione della luce, il dicroico apparirebbe invece nei toni del rosso, i toni che,
appunto, lo strumento VIS riceve (figura 2.6).
Figura 2.6: Filtro dicroico nel suo telaio di montaggio
2.2.1 Studio di tolleranza
Uno studio di tolleranza condotto sugli errori di fabbricazione ha fornito una valutazione statistica
dell’effetto che questi errori negli spessori degli strati avranno sulla risposta spettrale del dicroico. A
conclusione di circa 2000 test statistici viene graficata sullo schermo, in seguito ad una procedura com-
putazionale, una sequenza di curve: la caratteristica spettrale teorica è accompagnata da due curve che
indicano il corridoio di probabilità corrispondente alle deviazioni delle caratteristiche spettrali speri-
mentali rispetto alle loro aspettative matematiche. Queste curve sono indicate come Exp +/- D nella
16legenda dei grafici di figura 2.7. La larghezza del corridoio è associata ad una probabilità (qui del 90%)
che un valore caratteristico rientri in tale corridoio.
Questo studio mostra che il progetto designato è consistente rispetto alle richieste di risposta del di-
croico nelle bande di lunghezze d’onda specifiche per gli strumenti VIS e NISP. Difatti, questa piastra
dicroica mostra una riflettività di oltre il 99% nell’intervallo spettrale del visibile e una trasmissività
di oltre il 98% nell’intervallo spettrale nel NIR. Di seguito, vengono presentate come esempio le curve
spettrali caratteristiche per un Angolo di Incidenza (AOI) di 10.6° (Figure 2.7, 2.8).
Figura 2.7: Sopra: prestazione teorica di riflessività per il filtro dicroico nell’intervallo totale di lunghezze
d’onda [300;2100](nm) ad un AOI di 10.6°. Sotto: prestazione teorica di trasmissività per il filtro dicroico
nell’intervallo di lunghezze d’onda [900;2100](nm). Si nota che le lunghezze d’onda specifiche del colore
blu, intorno ai 470 nm, e dell’infrarosso ([900;2100](nm)) vengono trasmesse, mentre quelle relative alla
luce visibile ([500;800](nm)) vengono riflesse fino ad arrivare sullo strumento VIS.
2.2.2 Coefficienti di Riflessione e Trasmissione: formazione dei ghost
Come si nota in figura 2.9, quando la radiazione si impatta sul dicroico, essa è sottoposta ad una serie
di riflessioni e trasmissioni ripetute in corrispondenza della superficie di taglio del rivestimento antiri-
flesso. A queste molteplici riflessioni e trasmissioni è associata la formazione di componenti luminose,
17Figura 2.8: Ingrandimento della prestazione teorica di riflessività per il filtro dicroico nell’intervallo totale
di lunghezze d’onda [300;2100](nm) ad un AOI di 10.6°. Si nota che la curva teorica (in blu) è confinata
all’interno del corridoio di probabilità (linee rosse). Le 2 curve nere rappresentano, invece, i requisiti della
risposta del filtro dicroico, che vengono evidentemente rispettati.
Figura 2.9: Un fascio di luce, impattandosi sulla superficie del dicroico, si separa in una componente ri-
flessa Rd ed una trasmessa Td ; questa, a sua volta, impattandosi sulla superficie di taglio del rivestimento
antiriflesso, si scinde in una componente trasmessa Td Tar e in una riflessa Td Rar . Quest’ultima si divide
ulteriormente, e cosı̀ via. Riflessioni e trasmissioni secondarie danno orignie ai ghost riflessi e trasmessi.
18dette ghost, sia dal lato del dicroico che dal lato del rivestimento antiriflesso, che si sommano alle com-
ponenti principali trasmessa e riflessa. In particolare, è possibile calcolare i coefficienti di riflessione e
trasmissione totali Rtotal e Ttotal della radiazione:
∞
X
i
Ttotal = Td Tar + Td Tar Rar Rdi
i=1
| {z }
Ghost
Risulta, quindi, che il coefficiente di trasmissione associato ai ghost trasmessi è una quantità dipendente
dalla trasmissione e dalla riflessione del rivestimento dicroico e del rivestimento antiriflesso (Td , Rd , Tar
e Rar ).
X∞
2
Rtotal = Rd + Td i
Rar Rdi−1
i=1
| {z }
Ghost
Il coefficiente di riflessione associato ai ghost riflessi, invece, è una quantità che dipende dalla tra-
smissione e dalla riflessione del rivestimento dicroico (Td e Rd ) e dal riflesso del rivestimento antiriflesso
(Rar ).
Rapporti di contrasto
Il rapporto di contrasto è un parametro utile per controllare la formazione dei ghost al variare della
lunghezza d’onda del segnale di input sul dicroico (vedi figure 2.10 e 2.11). Esso viene definito a seconda
della banda di lunghezze d’onda alla quale appartiene l’input monocromatico considerato:
• Regione di rifiuto del blu: verso il VIS
Se l’input appartiene all’intervallo spettrale di rifiuto del blu visibile, allora esso sarà riflesso verso
la camera VIS. Il rapporto di contrasto è definito, quindi, come il rapporto tra il flusso massimo
del ghost riflesso, accumulatosi su più riflessioni interne, e il livello minimo del flusso riflesso per
un input monocromatico a qualsiasi lunghezza d’onda nell’intervallo spettrale in banda visibile e
alla stessa ampiezza del segnale in ingresso nella banda di rifiuto del blu.
• Regione di rifiuto del rosso: verso il NISP
Se l’input appartiene all’intervallo spettrale di rifiuto del rosso visibile, allora esso sarà trasmesso
verso il NISP. Il rapporto di contrasto è definito, quindi, come il rapporto tra il livello massimo del
ghost trasmesso, accumulatosi su più riflessioni interne, e il livello minimo del segnale riflesso per
un input monocromatico a qualsiasi lunghezza d’onda nell’intervallo spettrale in banda visibile e
alla stessa ampiezza del segnale in ingresso nella banda di rifiuto del rosso.
Lo studioPdei ghost riflessi
è importante ai fini della buona riuscita della missione: infatti, la com-
∞
ponente Td i=1 Rar Rd
2 i i−1
di Rtotal è responsabile di riflessi nelle immagini nel visibile catturate dalla
camera VIS; tali riflessi hanno un’intensità pari a circa 10−7 volte la luminosità iniziale delle stelle, per-
tanto sono significativi soltanto per gli oggetti più luminosi.
Essi devono comunque essere rimossi per consentire un’appropriata analisi dei dati ed evitare una per-
dita dell’informazione acquisita dal telescopio.
È fondamentale, perciò, implementare un procedimento per individuare in un’immagine di campo even-
tuali ghost che verranno, in un secondo momento, eliminati. Uno dei possibili metodi è rappresentato
dall’utilizzo della Trasformata di Hough, che sarà approfondita nel Capitolo 4.
19Figura 2.10: Prestazioni teoriche, sperimentali e richieste del dicroico nella produzione di ghost. Qui viene
graficato l’andamento del rapporto di contrasto per ghost riflessi al variare dell’AOI tra 300nm e 2100nm.
Si nota la presenza di ghost nell’intervallo spettrale del blu visibile e dell’IR.
Figura 2.11: Prestazioni teoriche, sperimentali e richieste del dicroico nella produzione di ghost al variare
dell’AOI tra 900nm e 2100nm. A sinistra: rapporto di contrasto per il ghost riflesso. A destra: rapporto di
contrasto per il ghost trasmesso. I due andamenti sono simili ma il rapporto di riflessione risulta maggiore
di quello di trasmissione di 2 ordini di grandezza.
202.2.3 Al di là del dicroico: l’Assemblaggio Opto-Meccanico del NISP (NI-OMA)
Il NISP è lo strumento per Spettrometria e Fotometria nel vicino infrarosso che, insieme al VIS, costi-
tuisce il Payload a bordo del veicolo. Esso opera nell’intervallo [0,9;2,0] (µm), quindi nel NIR, ad una
temperatura inferiore a 140 K (ad eccezione dei rivelatori, raffreddati a ∼120 K), fornendo misurazioni
per i redshift. Il suo gruppo opto-meccanico (NI-OMA, figura 2.12) contiene gli elementi ottici del-
lo strumento, che rappresentano il proseguimento del telescopio di Euclid nella direzione di ingresso
del fascio sul dicroico (figura 2.13). Due meccanismi montati su NI-OMA permettono di selezionare la
Figura 2.12: NI-OMA con vista del sistema di rivelazione NI-DS (Detector System), che rileva il segnale NIR
in modalità fotometrica e spettroscopica.
modalità di osservazione tra le 2 di cui il NISP dispone:
• nella modalità fotometrica (per l’acquisizione di immagini con filtri a banda larga) le immagini
dello strumento NISP vanno da 920 nm a 2000 nm (Bande Y, J, H) su un array di 16 rivelatori. La
risoluzione spaziale è complessivamente di (0,30 ± 0,03) arcsec per pixel in tutte e 3 le bande.
• nella modalità spettroscopica (per l’acquisizione di immagini disperse 2 senza fessura sui rile-
vatori) la luce del bersaglio osservato viene dispersa per mezzo di grism nella gamma di lunghezze
d’onda tra 1,1 e 2 µm.
Il NI-OMA è composto da due sottogruppi (figura 2.13):
• il Corrector Lens Assembly (NI-CoLA), che corregge l’aberrazione residua provocata dal tele-
scopio principale ed è costituito da:
– una lente correttrice (CL) in silice fusa con la sua struttura di sostegno.
– un filtro, anch’esso in silice fusa, con superficie di entrata sferica e superficie di uscita piatta.
• il Camera Lens Assembly (NI-CaLA), grazie al quale l’immagine del campo visivo viene pro-
iettata sul piano focale. È costituito da:
2
i.e. separate nelle varie componenti spettrali
21– un grism3 di silice fusa avente superficie di ingresso realizzata in ottica binaria 4
– tre lenti sferiche-asferiche del menisco L1-L3 insieme alla loro struttura portante. L1 è
costituito da CaF 2, mentre L2 e L3 sono realizzati in LF 5G15 5 .
Figura 2.13: Modello 2D del design ottico NISP. Tra le varie lenti, figura anche il BS-FD, facente parte del
telescopio principale di Euclid. Il telescopio fornisce il fascio di entrata attraverso il dicroico. Gli effetti
termo-meccanici negli elementi ottici sono compensati tramite anelli di adattamento, necessari affinchè
forze e momenti torcenti siano quasi zero e affinchè forma e posizione delle lenti rientrino nelle tolleranze
ottiche.
3
Un grism è un elemento ottico dispersivo composto da un reticolo (grating) ed un prisma che sfrutta abilmente le
differenze tra questi due oggetti: il reticolo di diffrazione devia il rosso più del viola, mentre il prisma devia la luce viola più
del rosso. Combinando i due, la luce può essere separata nelle sue componenti spettrali mentre si annullano le deviazioni del
fascio rispetto alla direzione incidente provocate dal reticolo diffrazione. La luce viene dispersa, ma l’impatto sulla direzione
generale del raggio è ridotto al minimo, riducendo l’impatto sull’ottica del sistema.
4
L’ottica binaria è una tecnologia ottica che utilizza le potenzialità della microelettronica di precisione per realizzare
rilievi superficiali attraverso tecniche di fabbricazione quali principalmente fotolitografia e incisione. Il termine ”binario”
fa riferimento allo schema di codifica binaria utilizzato nella creazione delle maschere fotolitografiche. Questa tecnologia
consente la creazione di nuovi elementi ottici non convenzionali e offre una maggiore libertà di progettazione per risol-
vere problemi nei sensori ottici. Il grism usato nel NISP è, difatti, una superficie reticolare binaria realizzata attraverso
fotolitografia, imprimendo il profilo della scanalatura su uno strato di resina.
5
LF 5G15 è un tipo di vetro prodotto da Schott che resiste alle alte radiazioni e lavora a regime anche in ambiente
radioattivo.
22Capitolo 3
Camera di Visibile Imaging (VIS)
3.1 Descrizione funzionale
La camera di Visible Imaging (VIS) è un insieme delle unità elencate nella Tabella:
Nome Unità Funzione
VI-FPA Assemblaggio del Piano Focale VIS Rilevazione della luce visibile per
l’imaging
VI-SH Shutter (otturatore) Blocco del percorso ottico VIS durante
l’apertura e la chiusura del telescopio
VI-CU Unità di Calibrazione VIS Calibrazione per illuminare l’FPA con
Flat Field
VI-CDPU Unità di Controllo e Data Processing -Strumento di controllo
-Esegue l’elaborazione dei dati
-Interfaccia con veicoli spaziali per la
gestione dei dati
VI-PMCU Unità di controllo di potenza e meccanismo Unità di controllo
VI-FH Imbracatura di volo Collegamento di tutte le unità
Il layout di queste unità (escluso il cablaggio) è mostrato in figura 3.1. Queste saranno ora descritte in
modo dettagliato.
3.1.1 Gruppo del Piano Focale
Il Gruppo del Piano Focale (VI-FPA) è una struttura termo-meccanica composta da due parti principali,
il sottoinsieme del rivelatore e il sottoinsieme dell’elettronica, che non sono collegati meccanicamente,
ma solo elettricamente dal cablaggio delle CCD. Questo al fine di prevenire, all’avvio, perturbazioni
meccaniche e/o termiche della matrice di CCD.
• Il rivelatore è costituito da una matrice 6 × 6 di Charge-Coupled Device (CCD) e dal relativo
supporto termo-meccanico, e fornisce, in aggiunta, un percorso termico per la potenza dissipata
dalle CCD fino al radiatore associato al piano focale visibile. In questo modo viene garantita la
stabilità termica sull’intera estensione della matrice alla temperatura operativa di 153 K. Inoltre,
23Figura 3.1: Le unità comprendenti lo strumento VIS. In senso orario da sinistra in alto: il VI-FPA, l’otturatore,
un’unità di calibrazione e, nel modulo di servizio, l’Unità di Controllo del Meccanismo e l’Unità di Controllo
ed Elaborazione dei Dati.
i cablaggi delle CCD hanno sufficienti gradi di libertà per adattarsi ai piccoli movimenti relativi
dovuti alle vibrazioni.
• Il sottoinsieme dell’elettronica è costituito dall’elettronica di lettura (Read Out Electronics ROE),
dalle relative unità di alimentazione (Power Supply Units PSU) e da una struttura di supporto
meccanico, che aiuta a prevenire l’accoppiamento termico nel piano focale tra l’elettronica (più
calda) e le CCD, stabilizzate a freddo.
Anche il sottoinsieme dell’elettronica è collegato a un radiatore per garantirle la giusta tempera-
tura operativa, maggiore rispetto a quella delle CCD.
Il compromesso tra la ridondanza e le risorse di sistema è un progetto in cui ogni ROE supporta tre CCD
(figura 3.2). L’interconnessione tra CCD e ROE è ottimizzata per ridurre al minimo l’accoppiamento ter-
mico tra le CCD stabilizzate a freddo e l’elettronica, più calda.
Anche il packaging dell’elettronica ROE e PSU è progettato per ottimizzare i percorsi termico-conduttivi:
per questo motivo infatti è stata scelta una struttura basata su un telaio monolitico.
L’architettura termica interna ed esterna è riassunta nella figura 3.2: ci sono due radiatori situati all’e-
sterno della Camera VIS, uno freddo per le CCD e uno caldo per i ROE.
Al fine di raggiungere la stabilità termica di (153,0±0,3) K a livello delle CCD, i riscaldatori e i sensori di
temperatura sono implementati per ciascuna coppia di ROE (i.e. ogni riga CCD) e poichè è stata adottata
una doppia ridondanza, il piano focale sarà dotato in totale di 12 riscaldatori e 12 sensori di temperatura.
24Figura 3.2: L’elettronica ROE sarà costruita su una scheda a circuito stampato che ospiterà i circuiti che sono
comuni alle tre CCD. Le dimensioni delle CCD determinano le dimensioni dell’unità ROE. In alto: scheda
ROE a circuito stampato con CCD. In basso: schema esplicativo dei collegamenti tra ROE e CCD.
Nuove CCD, chiamate CCD273, sono state sviluppate appositamente per la camera VIS di Euclid per
ottimizzare le sue prestazioni radiative. Ciascuna ha un formato di 4k × 4k pixel, ogni pixel di 12 µm2 .
Una raffigurazione è mostrata in figura 3.3.
Figura 3.3: La CCD273 vista dalla parte anteriore e posteriore.
3.1.2 Otturatore VIS
L’otturatore (VI-SH, figura 3.1, in alto a destra) impedisce alla luce diretta di cadere sulle CCD, evitando
cosı̀ nelle immagini la presenza di scie durante la fase di chiusura del telescopio, che ha lo scopo di
permettere la lettura e la calibrazione dei dati ad opera della VI-CU. Il VI-SH impedisce, inoltre, qualsiasi
interferenza con i raggi luminosi durante la fase di apertura del telescopio e allo stesso tempo consente
25ai sensori di guida fine di essere esposti alla luce in modo continuo.
In seguito ad un lungo compromesso, si è optato per una configurazione a portello singolo, che si chiude
allontanandosi dal rivelatore e si apre verso il rivelatore ed il cui asse di rotazione è parallelo al lato più
lungo del VI-FPA.
Apertura e chiusura sono gestite da 2 motori passo-passo, uno primario ed uno ridondante, che si
attiverà in caso di guasto del primo, ed una molla a torsione funzionante contro la testa del motore
(figura 3.4). 2 bracci di trasmissione in prossimità dei 2 motori consentono, in caso di guasto, un facile
disaccoppiamento del motore dal portello e una facile introduzione del motore ridondante.
Il portello può essere la causa di riflessioni indesiderate causate dal fascio di luce in ingresso. Allora,
Figura 3.4: Sistema dell’otturatore
delle protezioni geometriche possono essere implementate sull’otturatore per evitare che questo riflesso
colpisca le CCD.
L’otturatore è guidato dal VI-PMCU.
3.1.3 Unità di calibrazione VIS
L’unità di calibrazione VI-CU è progettata affinchè sul piano focale, quindi sul VI-FPA, giungano campi
piani del canale visibile.
Il concetto di questa unità si basa su una sfera integrata (figura 3.1), struttura che racchiude un pannello
a 12 LED che illumina un pannello di diffusione. Le superfici ottiche interne della sfera sono rivestite
con Spectralon, che ha un’alta riflettività sulla lunghezza d’onda di interesse per lo Strumento VIS (da
600 a 900nm). Sono previste due porte ottiche, una per le sorgenti luminose e una per la luce in uscita
che illumina il VI-FPA in corrispondenza delle CCD.
Le sorgenti luminose illuminano sia il canale principale che quello di ridondanza. Ogni canale fornisce
tre lunghezze d’onda da 600 nm a 900 nm, ognuna delle quali utilizza due LED, per un totale di 12 LED. La
porta della luce di uscita è chiusa da una finestra di BK7 per mantenere l’interno della CU estremamente
pulito. Questo vetro è stato scelto per la sua elevata trasmissione da 600 a 900 nm.
La VI-CU è guidata dalla VI-PMCU.
263.1.4 Unità elettroniche: VI-CDPU e VI-PMCU
Due unità elettroniche sono associate allo strumento: l’Unità di Controllo ed Elaborazione Dati (VI-
CDPU) e l’Unità di Controllo di Potenza e Meccanismo (VI-PMCU).
La VI-CDPU controlla lo strumento e comprime i dati scientifici prima di trasferirli nella memoria di
massa del payload. La VI-PMCU controlla i meccanismi dello strumento e le unità di calibrazione. Nel
dettaglio:
• Unità di controllo ed elaborazione dati (VI-CDPU): meccanicamente la CDPU è composta da
una scatola con sei pannelli di alluminio con nervature sul lato esterno e piedini con cantilever
su due lati opposti (figura 3.1). Si trova all’interno del Modulo di Servizio.
La VI-CDPU, il cui software in esecuzione è composto da moduli di avvio e d’applicazione, è
responsabile delle seguenti attività principali:
1. Scambio di telemetria e telecomandi con l’unità di controllo e gestione dei dati del veicolo
spaziale.
2. Comando dello strumento, basato sui telecomandi ricevuti e interpretati.
3. Monitoraggio e controllo dello strumento, basato sui dati acquisiti dalle altre unità strumen-
tali.
4. Sincronizzazione di tutte le attività dello strumento.
5. Acquisizione dei dati dai ROE, pre-elaborazione e formattazione in base ai protocolli di
telemetria selezionati.
Per garantire l’efficienza dell’unità in caso di guasto, tutte le funzioni sono implementate su 16
schede elettroniche.
• Unità di Controllo di Potenza e Meccanismo (VI-PMCU): comprende tutte le funzioni ne-
cessarie per controllare i meccanismi della Camera VIS nonché le fonti di calibrazione. Per ga-
rantire l’efficienza dell’unità in caso di guasto, tutte le funzioni sono implementate su 5 schede
elettroniche (figura 3.1).
3.2 Elementi critici
Gli elementi critici del VIS che richiedono particolare attenzione nella progettazione e nella costruzione
sono:
• Le CCD. Con l’altissima qualità di imaging richiesta a VIS per ottenere prestazioni di WL, ci sono
molti aspetti delle CCD che richiedono una profonda comprensione e caratterizzazione. Fortu-
natamente, esiste un TRL (Technology Readiness Level) sostanziale associato a questi dispositivi.
Le CCD273 sono state sviluppate appositamente per la Camera VIS di Euclid: ottimizzano il de-
sign della famiglia CCD 203/204, che a sua volta ha un patrimonio spaziale. Gli effetti dei danni
dovuti alle radiazioni costituiscono una tra le maggiori criticità delle CCD. Sono stati stabiliti in
anticipo degli standard di volo per il funzionamento del dispositivo durante tutto il programma
di test. Teledyne e2v ha fornito i primi CCD273 di ingegneria per la valutazione e questi sono
27operativi nei test. Prima di questi, molti dispositivi CCD 203/204 sono stati testati con radiazioni
e caratterizzati otticamente, per fornire input per le valutazioni delle prestazioni.
• I ROE. Il programma Gaia ha mostrato l’importanza di uno sviluppo precoce della catena di
rilevamento, affinchè le performance richieste siano raggiunte e affinchè i risultati dei test siano
rappresentativi. Ai ROE di Euclid sono richieste prestazioni simili agli equivalenti di Gaia, ma
con metà del budget di potenza e con convertitori analogico-digitali a 16 bit veramente provati
dalle radiazioni. Un ulteriore sviluppo è stato intrapreso nella fase di definizione per esaminare i
rumori derivanti dal funzionamento simultaneo di 3 CCD.
• L’ensemble e la metrologia di FPA. Il piano focale di Euclid sarà il secondo più grande ad essere
operativo nello spazio (dopo Gaia), e, essendo strettamente imballato, presenta particolari requi-
siti di assemblaggio/disassemblaggio e metrologia, da realizzare in un ambiente pulito, secondo
studiate procedure dettagliate.
• L’otturatore. Questo grande otturatore dovrà effettuare un gran numero di attuazioni in orbita
per tutta la sua durata e un guasto dell’otturatore avrà un grave impatto sul VIS. Grande attenzione
è stata posta nell’analisi dei guasti e nella pianificazione della ridondanza.
28Capitolo 4
La Trasformata di Hough
La Trasformata di Hough è una tecnica di estrazione delle caratteristiche utilizzata nel campo del-
l’elaborazione digitale delle immagini. Nella sua forma classica si basa sul riconoscimento delle linee
in un’immagine, ma è stata estesa anche al riconoscimento di altre forme arbitrariamente definite. Fu
scoperta da Richard Duda e Peter Hart nel 1972, ed è oggi utilizzata universalmente.
In questo Capitolo vengono approfonditi quindi i meccanismi alla base della Trasformata di Hough.
4.1 Trasformata Lineare
4.1.1 Le Basi
Supponiamo di voler identificare in un’immagine la figura di una scatola: il primo passo sarebbe iden-
tificare i pixel dei bordi usando un rilevatore di bordi, ad esempio Canny o Sobel.
Il passo successivo è ottenere una rappresentazione geometrica del bordo della scatola, cioè vogliamo
conoscere la sua pendenza, la sua intercetta, ecc., ma in questo momento il bordo è solo una sequenza
di pixel.
Potremmo ottenere la designata rappresentazione scorrendo tutti i pixel ma ci risulterebbe difficile
poichè le immagini non sono mai perfette. Quindi vogliamo un meccanismo che dia più peso ai pi-
xel che sono già allineati: questo è esattamente ciò che fa la Trasformata di Hough, consente a ciascun
punto dell’immagine di ”votare”.
E a causa delle proprietà matematiche della trasformazione, questo ”voto” ci permette di capire le linee
prominenti nell’immagine.
4.1.2 Dalle linee ai punti
Una linea è una collezione di punti e, banalmente, gestire una raccolta di punti è più arduo della gestione
di un singolo punto. Il primo passo da fare, quindi, è riuscire a rappresentare una linea come un singolo
punto, senza perdere alcuna informazione al riguardo. Questo è fatto attraverso lo Spazio m-c o Spazio
dei parametri: ogni linea nello spazio x-y equivale a un singolo punto nello spazio m-c.
29Figura 4.1: Spazio x-y e spazio m-c
Come mostrato nella figura 4.1, ogni linea ha due quantità associate, la pendenza e l’intercetta. Con
questi due parametri è possibile descrivere totalmente una linea.
4.1.3 Dai punti alle linee
Il prossimo passo è, dato un punto di coordinate (xa , ya ) nello spazio x-y, trovare la sua rappresentazione
nello spazio m-c.
Una qualsiasi linea che passa attraverso (xa , ya ) è:
ya = mxa + c
da cui segue l’equazione di una linea nello spazio m-c:
c = −xa m + ya
Di conseguenza, un punto nello spazio x-y equivale a una linea nello spazio m-c:
Difatti, per un punto passano infinite rette, quindi, per ogni retta che passa per (xa , ya ) ci sarebbe un
Figura 4.2: Un punto nello spazio x-y equivale a una linea nello spazio m-c
punto nello spazio m-c. L’insieme di questi punti è proprio la retta nello spazio m-c.
La Trasformata di Hough si basa proprio sul procedimento di conversione dei punti nello spazio x-y in
linee nello spazio m-c. Se si dispone di un’immagine in cui sono stati rilevati i bordi, allora per ogni
punto del bordo, che supponiamo essere una linea, la Trasformata disegna una linea nello spazio m-c.
Ovviamente, alcune linee si intersecano ed il punto di intersezione identifica i parametri del bordo. La
figura 4.3 chiarisce questa idea.
30Figura 4.3: I punti 1, 2, 3 e 4 sono rappresentati come linee nello spazio m-c. L’intersezione di queste linee
rappresenta la linea originale.
4.1.4 Forma Normale
Questo procedimento, tuttavia, presenta un grave difetto: il valore di m tende all’infinito per le linee
verticali; pertanto, si dovrebbe disporre di memoria infinita per poter memorizzare le informazioni nel-
lo spazio mc. Il problema viene risolto utilizzando una diversa parametrizzazione: invece della forma
pendenza-intercetta, usiamo la Forma Normale, che risolve perfettamente il difetto.
In questa rappresentazione, una linea viene trasformata in un punto usando due parametri diversi:
Parametro Definizione Range
ρ modulo della normale alla linea passante dall’origine 0≤ ρ ≤ ρmax
θ angolo che la normale crea con l’asse x -90° ≤ θ ≤ +90°
dove ρmax è il modulo della diagonale dell’immagine.
Questi 2 parametri sono limitati e quindi è possibile memorizzarli su un computer senza difficoltà.
In questa rappresentazione, l’equazione della linea è:
ρ = xP cosθ + yP sinθ
dove (xP , yP ) è il punto della linea per il quale passa la normale.
Con questa nuova equazione, abbiamo alcune modifiche nel passaggio dallo spazio x-y allo spazio
ρ-θ: una linea nello spazio x-y è ancora equivalente a un punto nello spazio ρ-θ, ma un punto nello
31Figura 4.4: I punti (x,y) e (u,v) nello spazio x-y sono equivalenti alle 2 curve sinusoidali nello spazio ρ-θ
spazio x-y è ora equivalente a una curva sinusoidale nello spazio ρ-θ (figura 4.4).
4.1.5 Implementazione
Con questi concetti è possibile quindi implementare la Trasformata di Hough. L’idea è di far votare ogni
pixel nello spazio ρ-θ. Per lo scopo viene creato un accumulatore (che rappresenta appunto lo spazio
ρ-θ), cioè una matrice di celle che formano un array 2D. L’asse orizzontale è per i diversi valori θ e l’asse
verticale per i valori ρ.
Figura 4.5: L’accumulatore è una matrice, cioè un array 2D, ed ogni cella contiene un numero che
rappresenta il numero di voti della singola cella stessa.
Il ciclo implementato analizza ogni pixel del bordo dell’immagine rilevata. Si fa presente che la Trasfor-
mata funziona solo su immagini rilevate attraverso i corrispettivi bordi e non su immagini normali.
Quindi, se un pixel è zero, questo viene ignorato in quanto non può essere una linea, e si passa al pixel
successivo.
Se un pixel è diverso da zero, si genera la sua curva sinusoidale nello spazio ρ-θ (le celle dell’accumu-
latore). Si parte da θ = -90° e si calcola il corrispondente valore di ρ. Quindi si aggiunge un voto nella
cella dell’accumulatore (ρ,θ), cioè si aumenta il valore di questa cella di 1. Successivamente si passa al
valore di θ successivo e si calcola il corrispondente valore di ρ. Si prosegue cosı̀ fino a θ = +90.
Questo ciclo viene ripetuto per ogni pixel diverso da zero.
Si otterrà un’immagine simile alla figura 4.6: i ”punti luminosi”, corrispondenti alle celle che hanno
ricevuto più voti,descrivono le linee nell’immagine originale.
L’accuratezza della Trasformata di Hough dipende dal numero di celle dell’accumulatore di cui si
32Puoi anche leggere