La riabilitazione del controllo posturale con dispositivi robotici: una scoping review
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
LETTERATURA INTERNAZIONALE
La riabilitazione del controllo posturale
con dispositivi robotici: una scoping review
Paolo TORNERI1, Zoe MENASPÀ1, Sanaz POURNAJAF2, Stefano MAZZOLENI3, Carlo D’AURIZIO4, Nicola VALÈ1,
Marialuisa GANDOLFI1.
1
Dipartimento di Neuroscienze, Biomedicina e Movimento, Università di Verona, Verona, Italia.
2
Dipartimento di Scienze Neurologiche e Riabilitative, IRCCS San Raffaele Roma, Roma, Italia
3
Dipartimento di Ingegneria Elettrica e dell’Informazione, Politecnico di Bari, Bari, Italia.
4
Carlo D’Aurizio, UOC Medicina Fisica e Riabilitativa ASL di Pescara, Pescara, Italia
Corresponding Author:
Marialuisa Gandolfi
Dipartimento di Neuroscienze, Biomedicina e Movimento, Università di Verona
Email: marialuisa.gandolfi@univr.it
Abstract disturbi del controllo posturale medi- dell’ambiente circostante. La seconda
ante dispositivi robotici ed elettrome- funzione, ovvero l’equilibrio postura-
Introduzione: La riabilitazione del ccanici utilizzando dispositivi espres- le, è la capacità di utilizzare adeguate
controllo posturale rappresenta un samente sviluppati per tale scopo è strategie sensorimotorie per stabiliz-
importante obiettivo nella riabilitazi- attualmente limitata. I pochi studi zare il centro di massa corporeo
one di persone con disabilità di origi- esistenti sono stati condotti, tuttavia, (CoM) in seguito a perturbazioni (au-
ne neurologica. Lo scopo di questa con disegni sperimentali rigorosi toindotte o dettate dall’ambiente es-
revisione narrativa è riportare una (RCT) e nella maggior parte dei casi terno). L’equilibrio posturale a sua
revisione narrativa della letteratura su ampie casistiche. volta riguarda attività statiche (come,
sui dispositivi robotici ed elettromec- Conclusioni: I dispositivi tecnologici ad esempio, il mantenimento della
canici espressamente utilizzati per la ideati per la riabilitazione del control- stazione eretta) e attività dinamiche
riabilitazione del controllo posturale lo posturale sono ancora numerica- (come ad esempio la deambulazione).
in pazienti con disabilità di origine mente esigui, gli studi a riguardo I disturbi dell’equilibrio rappresenta-
neurologica sia in età evolutiva che mostrano interessanti prospettive per no un capitolo molto importante in
adulta. la loro implementazione all’interno riabilitazione potendosi manifestare
Materiali e metodi: la letteratura della pratica clinica. in qualsiasi età (evolutiva, adulta ed
pubblicata in lingua inglese sulle Keywords: controllo posturale, equi- anziana) come conseguenza di patol-
banche dati MEDLINE e Cochrane Li- librio, riabilitazione, patologia neuro- ogie sia neurologiche che ortopediche
brary nel periodo compreso tra logica, dispositivi robotici. [2]. Nell’ultimo decennio, si è verifi-
settembre 2009 e maggio 2021 è stata cato un notevole sviluppo in questo
inclusa nella revisione. Sono stati es- campo, sia in termini di conoscenza
clusi studi con dispositivi per la riabil-
Introduzione
della fisiopatologia di tali disturbi sia
itazione del cammino. Lo screening e Il controllo dell’equilibrio è spesso di valutazione e trattamento, in
l’estrazione dei dati sono stati eseguiti considerato parte del controllo pos- quanto i disturbi dell’equilibrio sono i
da due revisori indipendenti. turale, definito come capacità di man- primi fattori predittivi di rischio di ca-
Risultati: Sono stati identificati com- tenere, raggiungere o ripristinare uno dute e progressiva riduzione della
plessivamente 85 studi di cui sei studi stato di equilibrio durante qualsiasi mobilità di una persona [2-4].
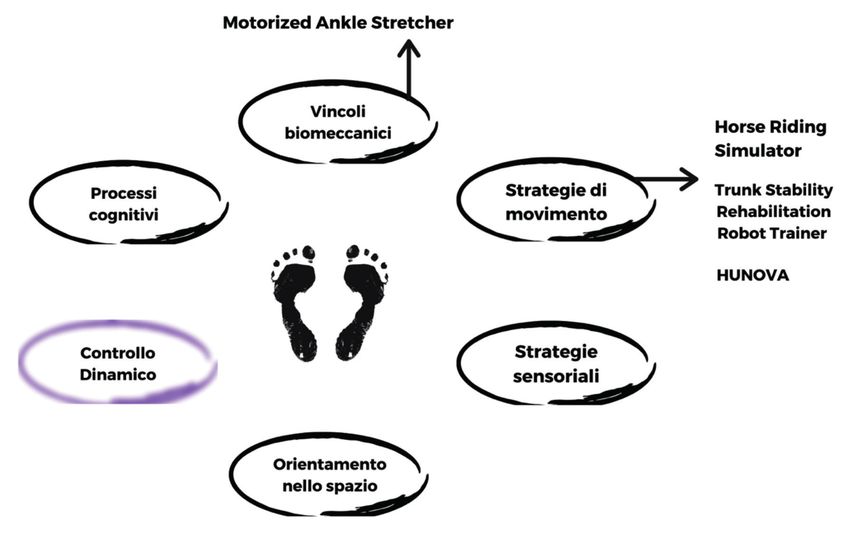
sono stati inclusi nella revisione. La postura o attività [1]. L’orientamento e l’equilibrio postura-
maggior parte riguardava pazienti Possiamo distinguere due funzioni le sono il risultato dell’interazione di
con esiti di ictus in fase cronica. Tutti principali del controllo posturale: sei diversi sistemi quali: vincoli
gli studi erano randomizzati control- l’orientamento e l’equilibrio postura- biomeccanici, strategie di movimen-
lati (RCT). Quattro studi su sei propo- le. Il primo fa riferimento alla capac- to, strategie sensoriali, orientamento
nevano un intervento intensivo men- ità di mantenere un adeguato tono spaziale, controllo dinamico, control-
tre due studi una sessione settimana- muscolare ed un allineamento dei lo cognitivo (principalmente attenzi-
le dalle 4 alle 10 settimane. segmenti corporei nel rispetto della one) [3].
Discussione: La riabilitazione dei gravità, della base di supporto e I vincoli biomeccanici prendono in
16 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa
LETTERATURA INTERNAZIONALE
considerazione la quantità e la qualità regolare e correggere l’uscita motoria. comitante [4]. Durante compiti di
della base di appoggio. In stazione er- È un sistema di controllo lento, la ris- dual task cognitivo-motorio (dove
etta la base di appoggio si riferisce posta può raggiungere centinaia di come compito motorio consideriamo
all’area delimitata dai due piedi ed è millisecondi. Il controllo a feedfor- il mantenimento della postura), le
influenzata da forza, mobilità, dolore ward è invece un controllo anticipa- risorse cognitive necessarie per lo
o controllo motorio a livello degli arti torio e agisce prima che una pertur- svolgimento efficace di entrambi i
inferiori. Una delle caratteristiche dei bazione avvenga. Le informazioni task sono maggiori rispetto a una
vincoli biomeccanici coinvolti nel sensoriali vengono utilizzate per pre- condizione in cui viene richiesto di
l’equilibrio, è quella di controllare il venire gli effetti di tale perturbazione. eseguire un solo task alla volta (ad es-
movimento del centro di massa (co- È estremamente veloce, viene affina- empio il mantenimento della postu-
munemente abbreviato CoM dal ter- to mediante l’apprendimento, modi- ra). In presenza di malattie neurolog-
mine anglosassone “Centre of Mass”) fica le azioni promosse dai meccanis- iche (i.e., decadimento cognitivo, le-
rispetto alla base di appoggio garan- mi a feedback [7]. sione cerebrale e malattie neurode-
tendo, quando siamo in piedi, un’ar- Le “strategie sensoriali” rappresenta- generative), tuttavia, le risorse cogni-
ea di stabilità (detta cono di stabilità), no l’integrazione di tutte le infor- tive a disposizione del soggetto sono
all’interno della quale un individuo mazioni che vengono raccolte dal limitate. Ne consegue che questi sog-
riesce a muovere il suo centro di mas- sistema somatosensoriale, visivo e getti, in condizioni di doppio compi-
sa senza variare la base di appoggio vestibolare. Un soggetto sano in un to, dovranno distribuire le loro scarse
[5]. Pertanto, l’equilibrio rappresenta ambiente ben illuminato, appoggiato risorse attentive tra il controllo pos-
una zona dello spazio determinata su di una base di supporto stabile, si turale e il compito cognitivo, svolgen-
dalla base di appoggio ed a sua volta affida al 70% al sistema somatosen- doli entrambi in modo non ottimale.
influenzata dalle limitazioni artico- soriale, al 20% a quello vestibolare e Ciò espone il paziente a rischio di ca-
lari, dalla forza muscolare e dalle in- al 10% a quello visivo [8]. Al mutare duta [13,14]. Esercizi orientati al dual
formazioni sensoriali disponibili ad del contesto sensoriale (ad esempio, task training possono portare ad un
identificare i limiti di stabilità. Il nos- superficie instabile o ad occhi chiusi) miglioramento del controllo postura-
tro sistema nervoso centrale ha una il contributo dei singoli sistemi varia le in persone con disabilità neurolog-
rappresentazione interna dell’area (reweighting) per mantenere un effi- ica [15-17].
del cono di stabilità che è utilizzata cace controllo posturale e prevenire Non è possibile affermare che un’al-
per mantenere il controllo posturale. le cadute. terazione a carico di un solo sistema
Le Strategie di Movimento sono defi- L’ “orientamento spaziale” descrive la possa condurre direttamente ad una
nite come le modalità attraverso le capacità di orientare il corpo rispetto disabilità per un paziente, in quanto
quali è possibile mantenere il control- alla gravità, alla superficie di appog- la complessa interazione tra i diversi
lo posturale dopo perturbazioni es- gio e all’ambiente esterno. In questo sistemi del controllo posturale e la
terne o autogenerate [6]. Le strategie contesto la persona ha una propria loro capacità vicariante limitano la
di movimento sono di tre tipi: di rappresentazione del corpo nello possibilità di individuare una corris-
caviglia, d’anca e del passo. Le prime spazio [9], creando un senso di verti- pondenza univoca tra alterazione
due sono utilizzate per rispondere a calità e direzionalità che è punto di funzionale e disabilità. Questo com-
perturbazioni di entità lieve che non riferimento nei movimenti del sog- porta la necessità di valutare tutti i
richiedono l’allargamento della base getto. In pazienti con neglect, ad es- sistemi coinvolti per individuare le
di appoggio. Esse permettono di spo- empio, questi riferimenti spaziali pos- specifiche compromissioni come pre-
stare il Centro di Pressione (comune- sono risultare alterati [10]. visto dal Balance Evaluation Systems
mente abbreviato CP) in direzione Il “controllo dinamico” riguarda Test - BEST Test (http://www.bestest.
antero-posteriore (per la strategia di l’abilità del soggetto di controllare lo us/test_copies/) e successivamente
caviglia) e in direzione medio-laterale spostamento del centro di massa implementare interventi riabilitativi
(per la strategia di anca). In caso di quando esso esce dal cono di stabilità, specifici secondo un approccio fisi-
perturbazione esterna per la quale le come durante l’esecuzione dei pas- opatologico ed individualizzato
strategie d’anca e caviglia non sono saggi posturali e il cammino [11]. I [18,19] basato sulla conoscenza del
sufficienti a garantire il controllo pos- pazienti con disturbi dell’equilibrio e tipo di disturbo sottostante [20, 21].
turale, la strategia del passo richiede a rischio di caduta tendono ad avere È noto, inoltre, come il controllo ner-
un aumento della base di appoggio. delle escursioni anomale del centro di voso della postura ed equilibrio non
Le strategie di movimento possono massa non bilanciate da un adeguato dipendano da un unico centro nervo-
essere attivate in modalità feedback spostamento dei segmenti corporei so, ma dall’interazione di diversi net-
(o reattiva) oppure in modalità feed- con un conseguente aumento del work sensori-motori e cognitivi [22].
forward (anticipatoria). Nel controllo rischio di caduta [12]. Da ciò è possibile evincere come an-
a feedback i segnali provenienti dai I processi cognitivi (in particolar che dal punto di vista valutativo, il
recettori sensoriali vengono confron- modo l’attenzione) sono attivamente clinico debba concentrare la sua at-
tati con un segnale di riferimento implicati nel controllo posturale e il tenzione anche sulla natura e sede
(condizione da mantenere). La dif- loro coinvolgimento aumenta in della lesione nervosa [3, 23].
ferenza fra questi due segnali è detta modo proporzionale all’aumentare di Un settore emergente nell’ambito
segnale di errore, viene utilizzata per difficoltà di un ulteriore compito con- della neuroriabilitazione è rappresen-
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 17LETTERATURA INTERNAZIONALE
tato dallo sviluppo di dispositivi ro- do sia le fasi acute che croniche della dello studio, caratteristiche cliniche
botici ed elettromeccanici per la ri- malattia. Sono stati considerati solo della popolazione, il disegno dello
abilitazione degli esiti motori conseg- studi clinici scritti in inglese, studi pi- studio e gli scopi della riabilitazione);
uenti a patologie neurologiche. Un lota e studi osservazionali. Sono stati (2) Tipologia di dispositivo robotico;
robot è un dispositivo elettromeccan- esclusi gli studi clinici che combinano (3) registrazione con marchio CE.
ico dotato di attuatori, un sistema di approcci robotici con altre tecnologie
sensori e un sistema di controllo [24]. come la stimolazione cerebrale non Risultati
Durante gli ultimi venti anni sono invasiva e la stimolazione elettrica
stati sviluppati un numero rilevante funzionale e studi che utilizzano dis- Dalla ricerca in letteratura sono stati
di dispositivi per la riabilitazione del positivi robotici per la riabilitazione identificati in tutto 31 studi in MED-
cammino [25] sia per l’età evolutiva del cammino. LINE e 54 in Cochrane Library pub-
che per quella adulta. Tali dispositivi Due autori hanno cercato in modo blicati tra novembre 2009 e maggio
hanno mostrato di essere efficaci an- indipendente e sincrono in MEDLINE 2021. Dopo lettura dei titoli ed ab-
che nel migliorare il controllo postur- e Cochrane Library. stract sono stati esclusi 26 in MED-
ale in condizioni statiche e dinamiche Per quanto riguarda gli studi clinici è’ LINE e 48 in Cochrane Library perché
in modo “indiretto” attraverso una stata utilizzata la seguente stringa di non rispondenti ai criteri di selezione.
combinazione di effetti su forza mus- ricerca per MEDLINE Cinque lavori sono stati eliminati in
colare, reazioni posturali, strategie di (((((((((((cerebral stroke[MeSH quanto duplicati. Al termine della
movimento, condizionamento e re- Terms]) OR (Chronic Stroke)) OR fase di screening sono stati inclusi
sistenza all’esercizio [26]. Gli effetti (Parkinson)) OR (Ataxia)) OR (head nella revisione complessivamente sei
sul controllo posturale dei dispositivi trauma)) OR (multiple sclerosis)) OR lavori.
robotici per la riabilitazione del cam- (neurological condition*)) OR (pal- Due studi hanno analizzato pazienti
mino sono stati riportati [27], mentre sy)) OR (cerebral palsy) AND ((clini- con esiti di paralisi cerebrale infantile
i dispositivi specificatamente svilup- caltrial[Filter] OR randomizedcon- per un totale di 68 pazienti con età
pati per la riabilitazione del controllo trolledtrial[Filter]) AND (fft[Filter]) compresa tra i 2 e i 18 anni. Tre studi
posturale sono stati parzialmente es- AND (english[Filter]) AND hanno riguardato pazienti con esiti di
plorati. (2009:2021[pdat]))) AND (((((Ro- ictus cerebrale in fase cronica per un
Lo scopo di questa scoping review è bot) OR (exoskeleton)) OR (end-ef- totale di 101 pazienti, un solo studio
riportare la letteratura sui dispositivi fector)) OR (robotics)) OR (exoskele- ha riguardato la malattia di Parkin-
robotici ed elettromeccanici espressa- ton device) AND ((clinicaltrial[Filter] son. Tutti gli studi presentavano un
mente utilizzati per la riabilitazione OR randomizedcontrolledtrial[Fil- disegno sperimentale del tipo ran-
del controllo posturale in pazienti con ter]) AND (fft[Filter]) AND (english[- domizzato controllato.
disabilità di origine neurologica sia in Filter]) AND (2009:2021[pdat])))) Il tipo di intervento prevedeva l’uti-
età evolutiva sia adulta e descrivere la AND ((postural balance[MeSH lizzo di un dispositivo di Horse Riding
loro applicazione nel contesto clinico. Terms]) OR (equilibrium) AND ((clin- Simulator nelle versioni FORTIS, KO-
Il presente lavoro permetterà di sug- icaltrial[Filter] OR randomizedcon- REA, OSIM U-Gallop e JOBA applica-
gerire lo specifico ruolo riabilitativo trolledtrial[Filter]) AND (fft[Filter]) to nei 2 studi sulle PCI e in uno studio
dei diversi dispositivi robotici ed AND (english[Filter]) AND con ictus cronico. Uno studio utilizza-
elettromeccanici secondo il modello (2009:2021[pdat])))) AND ((clinical- va il dispositivo Motorized Ankle
eziologico [3] e suggerire eventuali trial[Filter] OR randomizedcon- Stretcher (MAS) in pazienti con ictus
settori non ancora esplorati per studi trolledtrial[Filter]) AND (fft[Filter]) cronico, uno studio il dispositivo
futuri. AND (english[Filter]))) AND (((reha- 3DBT/33 sempre in pazienti con ictus
bilitation) OR (therapy)) OR (recov- cronico e uno studio utilizzava Huno-
ery) AND ((clinicaltrial[Filter] OR va nella malattia di Parkinson. Quat-
Materiali e metodi: randomizedcontrolledtrial[Filter]) tro studi proponevano un intervento
È stata condotta una ricerca della let- AND (fft[Filter]) AND (english[Fil- intensivo con un numero di sessioni
teratura da Maggio 2021 a Giugno ter]) AND (2009:2021[pdat]))) settimanali comprese tra 3 e 6 per
2021. Gli studi selezionati hanno Per Cochrane Library è stata utilizzata una durata complessiva del tratta-
considerato la riabilitazione assistita la seguente stringa di ricerca (stroke mento variabile dalle 4 alle 12 setti-
da robot per soggetti affetti da malat- OR head trauma OR multiple sclero- mane. Due studi proponevano una
tie neurologiche. La definizione sis OR Parkinson OR ataxia OR neu- sessione settimanale dalle 4 alle 10
proposta da Siciliano et al. è stata us- rological conditional OR palsy OR ce- settimane.
ata per identificare i dispositivi ro- rebral palsy) AND (Robotics OR sim- Per quanto riguarda i bambini sono
botici [24]. Sono stati inclusi pazienti ulator OR simulation OR “Exoskele- state utilizzate, come misure di out-
con condizioni neurologiche acquisite ton Device”) AND (“postural balance” come, la Gross Motor Function Mea-
e congenite come ictus, lesioni cere- OR equilibrium OR “balance postural sure-66 e la Sitting Assesment Scale.
brali traumatiche (TBI), sclerosi mul- control”) AND (rehabilitation OR re- Nei soggetti adulti sono state utilizza-
tipla (SM), Malattia di Parkinson covery OR therapy) te misure di valutazioni eterogenee
(PD), lesioni del midollo spinale (SCI) Per ogni articolo, sono state riportate tra i diversi studi: vengono utilizzate
e paralisi cerebrale (CP), consideran- le (1) caratteristiche cliniche (autori sia misure strumentali (GAITRite sys-
18 Vol. 36 - N. 3 - Giornale italiano di Medicina RiabilitativaLETTERATURA INTERNAZIONALE
Popolazione Disegno Tipo di intervento Frequenza/durata Informazioni tecniche del Misure di Risultati Marchio
di studio sessione/durata dispositivo Outcome CE
intervento
Herrero P PCI n:38 pz RCT GS: Horse 1 sessione a Horse Riding Core Trainer Exercise GMFM-66 La terapia con HRS NO
et al., con (4-18 Riding Simulator settimana/15 min Equipment, JOBA prodotto da (Sitting ON migliora
2012; anni) ON per sessione/10 “Matshuita (Panasonic) Dimension e l’equilibrio da seduto
GS:19; GC: Horse settimane Total score); nei bambini con PCI
GC:19 Riding Simulator SAS. e l’effetto è maggiore
OFF nei bambini con
maggiore disabilità.
L’effetto del
miglioramento si è
mantenuto anche
dopo aver sospeso la
terapia.
Chinniah PCI n: 30 pz RCT GS: 30 min di GS: 3 sessioni a OSIM U-Gallop (OS-950 Gallop GMFM-66 il gruppo sottoposto NO
et al., con (2-4 fisioterapia settimana/45 2. Ha 4 tipologie di velocità (Sitting ad hyppotherapy ha
2020; anni). convenzionale + minuti per manuali e un programma Dimension) mostrato un maggior
GS:15; 15 minuti di sessione/ 12 automatico con cambiamrneti nella miglioramento alla
GC:15 Horse riding settimane velocità pre-programmati. Le GMFM rispetto al
simulator GC: 3 sessioni a oscillazioni avvengono su tutti i gruppo di controllo
GC: 30 min di settimana/30 piani de movimento, frontale fino a 12 settimane
fisioterapia minuti per sagitale e trasversale.
convenzionale sessione/ 12
settimane
Park et ictus cronico RCT GS: fisioterapia Fisioterapia Horseback riding simulator KAT (equilibrio horseback riding ha NO
al., 2013 n: 67 pz convenzionale + convenzionale: 6 FORTIS, KOREA con 100 differenti statico); portato a migliori
con Horse riding sessioni a programmi di esercizi. È stato - BBS risultati rispetto al
GS: 34 simulator settimana/8 selezionato un esercizio con un (equilibrio gruppo di controllo
GC:33 GC: fisioterapia settimane ritmo in avanti ed in dietro dinamico)
convenzionale + Intervento/ confortevole (velocità avanti/
esercizi a corpo controllo: 3 indietro: 39m/min per circa 90-
libero per la sessioni a 100 movimenti, su e giù 73 m/
stabilità del settimana/35 min min per circa 90-100 movimenti.
tronco per sessione/8 35 minuti 3 volte a settimana, di
settimane solito 15 + 5 pausa + 15
Yoo et ictus cronico RCT GS: Motorized 2 sessioni a MAS (motorized ankle stretcher), -ROM TT lato GS: miglioramento NO
al., n:16 pz con ankle stretcher settimana/30 min costituito da due pedane con un affetto significativo del ROM
2018; GS:8; GC:8 (MAS) per sessione/3,5 attuatore lineare in-linea che che -SOT della caviglia, del
GC: esercizi di settimane generano rispettivamente -Parametri punteggio al SOT,
streaching con dorsiflessione ed eversione e spazio- dei parametri del
tavoletta supportano i carichi imposti sulle temporali del cammino.
pedane mentre paziente esegue cammino con CG: miglioramento
esercizi di dorsiflessione e/o GAITRite significativo solo al
eversione regolando la velocità e walkway SOT
la quantità di movimento system
Min et ictus cronico RCT GS: 3DBT-33 GS: 5 sessioni a 3DBT-33: robot end-effector usato - BBS, In entrambi i gruppi NO
al., 2020 n: 38 pz (Trunk Stability settimana/60 min per il training della stabilità del - (FAC miglioramenti
con Rehabilitation per sessione/4 tronco e per il rinforzo della - TUG statisticamente
GS:19; Robot Trainer ) settimane muscolatura degli arti inferiori. È ;K-MBI;FMA- significativi in tutti i
GC:19 GC: fisioterapia GC: 5 sessioni a possibile per il paziente eseguire LE. parametri (FMA-LE,
convenzionale settimana/30 min esercizi usando un contesto di K-MBI, FAC, BBS e
per sessione/4 gioco grazie a dei sensori TUG) tra pre-
settimane posizionati sulla seduta e sulla valutazione e follow
piattaforma up.
Ci sono state
differenze
statisticamente
significative nella
FMA-LE, K-MBI e BBS
tra il gruppo
sperimentale e il
gruppo di controllo.
Non c’è stata alcuna
differenza
significativa nella
FAC (P=0,935) e nel
TUG (P=0,442) .
Spina et Malattia di RCT GS: trainng 5 sessioni a Hunova: Hunova® è un robot Misure di In entrambi i gruppi SI
al., Parkinson n: dell’equilibrio settimana/ 45 end-effector “basato su oucome c’è stato un
2021; 22 pz con con dispositivo min a sessione/ piattaforma” composto da 2 primarie: miglioramento
GS:11; Hunova 4 settimana piattaforme elettromeccaniche. La -Mini BESTest significativo delle
GC:11 GC: training piattaforma robotica consente di -BBS misure di outcome.
dell’equilibrio eseguire esercizi sia in posizione Misure di Il gruppo
convenzionale eretta che seduta. Consente la outcome sperimentale ha
terapia passiva, attiva, secondarie: ottenuto risultati
propriocettiva e assistiva. -10-Meter significativamente
Walk Test migliori rispetto al
-5 times Sit to gruppo di controllo
stand test sia nella valutazione
-Parkinson’s post-intervento che
Deisease nel follow-up negli
Questionnaire outcome primari
39
Legenda: GMFM-66: Gross Motor Function Measure-66; SAS: Sitting Assessment Scale; KAT: Kinesthetic Ability Trainer; BBS: Berg Balance Scale; ROM: Range
Of Motion; SOT: Sensory Organization Test; FAC: Functional Ambulation Categories; TUG: Time Up and Go test; K-MBI: Korean Modified Barthel Index; FMA-
LE: Fugl-Meyer Assessment of Lower Extremity; Mini BESTest: Mini Balance Evaluation Systems Test;
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 19LETTERATURA INTERNAZIONALE tem, Kinesthetic Ability Trainer, misurazione del ROM di caviglia) che scale di valutazione per valutare l’equilibrio come Berg Balance Scale, Time Up and Go, Mini BESTest, il test di organizzazione sensorimotria, Functional Ambulation Categories, Korean Modified Barthel Index, Fugl-Meyer Assessment of Lower Ex- tremity. Un solo dispositivo è provvis- to di marchio CE (Hunova). Discussione Dalla presente Scoping Review emerge come la riabilitazione dei dis- turbi del controllo posturale medi- ante dispositivi robotici ed elettrome- ccanici espressamente sviluppati per tale scopo è attualmente limitata. Di Figura 1 Domini coinvolti nel controllo posturale e il possibile ruolo degli approcci riabilitativi robot-as- contro i pochi studi esistenti sono sta- sistiti. ti condotti con disegni sperimentali rigorosi (RCT) e nella maggior parte presentano un deficit in uno di ques- to in pazienti con ictus, mostrando un dei casi su ampie casistiche. to sistema (Figura 1). Uno studio miglioraramento del ROM della ti- Nonostante, al momento, la ricerca simile è stato condotto in pazienti con bio-tarsica e del controllo posturale riguardo i dispositivi robotici nella ri- ictus in fase cronica (> 6 mesi) sebbe- [32] fino ad un mese di follow-up. abilitazione del controllo posturale ne mediante l’utilizzo di un dispositi- Nei pazienti con ictus è stato studiato il sia ancora in una fase preliminare, vo differente (Horseback Riding sim- dispositivo Trunk Stability Rehabilita- dall’analisi della letteratura sono ulator FORTIS). Anche in questo caso tion Robot Trainer ideato apposita- emersi degli spunti interessanti si è assistito ad un miglioramento del mente per la riabilitazione del control- riguardo la potenzialità di questa mo- controllo posturale sia statico che di- lo posturale. Il paziente si trova seduto dalità di intervento. Nei soggetti con namico [31]. Gli studi selezionati, o in stazione eretta, con i piedi inseriti paralisi cerebrali infantile, ad esem- mettono in evidenza le potenzialità di all’interno di un poggia piedi, che può pio, la simulazione di ippoterapia un trattamento tramite simulatore essere comandato grazie all’utilizzo di somministrata tramite il dispositivo robotico nella riabilitazione del con- sensori attaccati alla sedia e due pul- Horse Riding Core Trainer Exercise trollo posturale nella popolazione santi posizionati a sinistra e destra del- Equipment JOBA, mostra risultati neurologica, tuttavia i campioni di la sedia stessa. È possibile tramite i due promettenti sul controllo dell’equilib- piccole dimensioni e la mancanza di pulsanti spostare il poggia piedi nelle rio in posizione seduta (misurato con follow-up nel lungo termine rendono diverse direzioni provocando uno Gross Motor Function Measure) necessario approfondire l’argomento spostamento del centro di massa e di [28,29]. L’ippoterapia è definita come con ulteriori ricerche. conseguenza richiedendo una differ- un approccio di riabilitazione per pa- Un altro dispositivo che sembra ente attività muscolare per il manteni- zienti con disabilità di diversa natura mostrare promettenti opportunità mento della posizione. che si basa sull’utilizzo dell’equitazi- nell’ambito della riabilitazione del Il training è quindi svolto con una one per fornire stimoli di carattere controllo posturale è il dispositivo modalità basata sul feed-back inviato fisico e cognitivo al fine di migliorare MAS, costituito da due pedane con al paziente. Ad esempio, il paziente sia funzioni motori che neuropsico- un attuatore lineare in-linea che che deve spostare il carico da destra a logiche. Nel caso di utilizzo di dispos- generano rispettivamente dorsiflessi- sinistra fino a sentire un suono che itivi robotici, tale trattamento si basa one ed eversione e supportano i cari- indica la corretta quantità di carico sul principio della generazione di de- chi imposti sulle pedane mentre pazi- sulla parte interessata. Un campione stabilizzazioni esterne erogate dal dis- ente esegue esercizi di dorsiflessione di pazienti con ictus cronico è stato positivo in modo ritmico sui tre piani e/o eversione regolando la velocità e sottoposto ad una sessione al giorno di movimento stimolando i riflessi la quantità di movimento. In questo da 30 minuti per 5 giorni a settimana posturali [30]. Con riferimento al caso, il dispositivo utilizzato, mira a per 4 settimane ed ha mostrato un contesto eziologico dei disturbi del migliorare il sottosistema dei vincoli miglioramento del controllo postura- controllo posturale questo dominio biomeccanici, in particolare la lim- le e dell’equilibrio che si è mantenuto potrebbe agire direttamente sulle itazione in dorsiflessione di caviglia, al follow-up di 8 settimane [33]. Il fo- strategie di movimento e potrebbe es- che può essere responsabile del defi- cus in questo training è quello di mi- sere quindi particolarmente efficace cit di controllo posturale del paziente gliorare il sottosistema delle strategie in quei pazienti che alla valutazione (Figura 1). Il dispositivo è stato studia di movimento (Figura 1). 20 Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa
LETTERATURA INTERNAZIONALE
Infine, l’unico dispositivo registrato sono ancora pochi, gli studi a riguar- 7(25), 13931–13936. https://doi.
con marchio CE è il dispositivo roboti- do mostrano interessanti prospettive org/10.1073/pnas.240279997
10. Karnath, H. O., Fetter, M., & Niemeier,
co end-effector Hunova costituito da per la loro implementazione all’inter- M. Disentangling gravitational,
due piattaforme elettromeccaniche, no della pratica clinica. environmental, and egocentric
utilizzabile sia da seduto che in stazi- reference frames in spatial
one eretta, che genera delle perturba- Eventuali ringraziamenti neglect. Journal of cognitive
zioni nello stato di equilibrio del sog- neuroscience, (1998) 10(6), 680–690.
Indicazione di eventuali finanzia- h t t p s : / / d o i .
getto, il quale deve reagire sfruttando menti o contributi educazionali: org/10.1162/089892998563095
le reazioni posturali a feed-back. Il dis- L’attività di ricerca di Sanaz Pournajaf 11. Winter, D. A., MacKinnon, C. D.,
positivo è stato studiato in soggetti con è supportata dal Ministro Italiano del- Ruder, G. K., & Wieman, C. An
malattia di Parkinson di grado lieve integrated EMG/biomechanical model
la Salute [Ricerca Corrente]” of upper body balance and posture
(Stadiazione Hoen Yahr con punteggi Indicazione di eventuali corsi, during human gait. Progress in brain
di 1 e 2) ed ha mostrato risultati posi- convegni o congressi durante i research, (1993) 97, 359–367. https://
tivi sul miglioramento del controllo quali sia stato presentato il mate- doi.org/10.1016/s0079-
posturale, simili al trattamento con- riale;
6123(08)62295-5
venzionali ma con un mantenimento 12. Prince F, Corriveau H, Hébert R, Winter
DA. Gait in the elderly. Gait & Posture.
dei risultati alla valutazione di fol- (1997) ;5(2):128-135. https://doi.
low-up associato ad una riduzione del
rischio di caduta e maggiore qualità di Bibliografia 13.
org/10.1016/S0966-6362(97)01118-1
Ghai S, Ghai I, Effenberg AO. Effects of
vita. Anche in questo caso il migliora- 1. Ivanenko, Y., & Gurfinkel, V. S. Human dual tasks and dual-task training on
mento prende di mira i sottosistemi Postural Control. Frontiers in postural stability: a systematic review
neuroscience (2018), 12, 171. https:// and meta-analysis. Clin Interv Aging.
del controllo dinamico e delle strategie doi.org/10.3389/fnins.2018.00171 (2017) Mar 23;12:557-577. doi:
di movimento (Figura 1)[32]. 2. Blain H, Miot S, Bernard PL. How Can 10.2147/CIA.S125201. PMID:
We Prevent Falls? Aug 21. In: Falaschi 28356727; PMCID: PMC5367902.
I dispositivi studiati e ideati per la ri- P, Marsh D, editors. Orthogeriatrics: 14. Roostaei M, Raji P, Morone G, Razi B,
The Management of Older Patients Khademi-Kalantari K. The effect of
abilitazione del controllo posturale
with Fragility Fractures (2021) Cham dual-task conditions on gait and
che abbiamo analizzato nella nostra (CH): Springer; 2021. Chapter 16. balance performance in children with
revisione mostrano risultati interes- PMID: 33347226. cerebral palsy: A systematic review
santi e buone prospettive per il loro 3. Horak FB. Postural orientation and and meta-analysis of observational
utilizzo nella pratica clinica. Gli studi equilibrium: what do we need to know studies. J Bodyw Mov Ther. (2021)
about neural control of balance to Apr;26:448-462. doi: 10.1016/j.
analizzati tuttavia presentano delle jbmt.2020.12.011. Epub 2020 Dec 9.
prevent falls? Age Ageing. (2006); 35
limitazioni, come il numero ridotto di Suppl 2:ii7-ii11. PMID: 33992282.
partecipanti e l’esecuzione di proto- 4. Woollacott M, Shumway-Cook A. 15. Martino Cinnera A, Bisirri A, Leone E,
colli riabilitativi non sempre ripro- Attention and the control of posture Morone G, Gaeta A. Effect of dual-task
ducibili all’interno dei setting clinici and gait: a review of an emerging area training on balance in patients with
of research. Gait Posture. (2002) multiple sclerosis: A systematic review
in termini di disponibilità di tali stru- Aug;16(1):1-14. doi: 10.1016/s0966- and meta-analysis. Clin Rehabil.
mentazioni, ma anche in termini di 6362(01)00156-4. PMID: 12127181. (2021) Apr 20:2692155211010372.
intensità dei trattamenti, limitando la 5. McCollum, G., & Leen, T. K. (1989). doi: 10.1177/02692155211010372.
validità esterna degli studi. Form and exploration of mechanical Epub ahead of print. PMID: 33874763.
stability limits in erect stance. Journal 16. He Y, Yang L, Zhou J, Yao L, Pang MYC.
Abbiamo visto, inoltre, come sia fon-
of motor behavior (1989) 21(3), 225– Dual-task training effects on motor
damentale indirizzare la riabilitazione 244. https://doi.org/10.1080/0022289 and cognitive functional abilities in
verso i sottosistemi che risultano defi- 5.1989.10735479 individuals with stroke: a systematic
citari nel paziente: a tal proposito, la 6. Horak F. B. Clinical measurement of review. Clin Rehabil. (2018)
maggior parte dei dispositivi robotici postural control in adults. Physical Jul;32(7):865-877. doi:
therapy (1987), 67(12), 1881–1885. 10.1177/0269215518758482. Epub
sono finalizzati al miglioramento dei
https://doi.org/10.1093/ 2018 Feb 23. PMID: 29473480.
vincoli biomeccanici e delle strategie ptj/67.12.1881 17. Li Z, Wang T, Liu H, Jiang Y, Wang Z,
di movimento. Permangono ine- 7. Seidler, R. D., Noll, D. C., & Thiers, G. Zhuang J. Dual-task training on gait,
splorate le potenzialità dei dispositivi Feedforward and feedback processes in motor symptoms, and balance in
robotici nei sottosistemi delle strate- motor control. NeuroImage, patients with Parkinson’s disease: a
(2004). 22(4), 1775–1783. https://doi. systematic review and meta-analysis.
gie sensoriali, dei processi cognitivi e o r g / 1 0 . 1 0 1 6 / j . Clin Rehabil. (2020) Nov;34(11):1355-
dell’orientamento dello spazio. Non neuroimage.2004.05.003 1367. doi:
consideriamo il controllo dinamico, 8. Peterka R. J. Sensorimotor integration 10.1177/0269215520941142. Epub
in quanto abbiamo escluso i disposi- in human postural control. Journal of 2020 Jul 13. PMID: 32660265.
tivi ideati per la riabilitazione del neurophysiology, 88(3), (2002). 1097– 18. Franchignoni F, Horak F, Godi M,
1118. https://doi.org/10.1152/ Nardone A, Giordano A. Using
cammino. jn.2002.88.3.1097 psychometric techniques to improve
9. Karnath, H. O., Ferber, S., & Dichgans, the Balance Evaluation. Systems Test:
Conclusioni J. The neural representation of postural the mini-BESTest. J Rehabil Med
control in humans. Proceedings of the (2010) ;42:323-31
I dispositivi tecnologici ideati per la National Academy of Sciences of the 19. Yingyongyudha, A., Saengsirisuwan,
riabilitazione del controllo posturale United States of America, (2000). V., Panichaporn, W., & Boonsinsukh,
Vol. 36 - N. 3 - Giornale italiano di Medicina Riabilitativa 21LETTERATURA INTERNAZIONALE
R.. The Mini-Balance Evaluation d o i . o r g / 1 0 . 1 0 1 6 / j . doi.org/10.1016/j.humov.2009.04.001
Systems Test (Mini-BESTest) parkreldis.2019.05.006 31. Park, J., Lee, S., Lee, J., & Lee, D. The
Demonstrates Higher Accuracy in 26. Gandolfi M, Dimitrova E, Nicolli F, effects of horseback riding simulator
Identifying Older Adult Participants Modenese A, Serina A, Waldner A, exercise on postural balance of chronic
With History of Falls Than Do the Tinazzi M, Squintani G, Smania N, stroke patients. Journal of physical
BESTest, Berg Balance Scale, or Timed Geroin C. Rehabilitation procedures in therapy science (2013)., 25(9), 1169–
Up and Go Test. Journal of geriatric the management of gait disorders in 1172. https://doi.org/10.1589/
physical therapy (2016), 39(2), 64–70. the elderly. Minerva Med. (2015) jpts.25.1169
https://doi.org/10.1519/ Oct;106(5):287-307. Epub 2015 Oct 32. Yoo, D., Son, Y., Kim, D. H., Seo, K.
JPT.0000000000000050 27. PMID: 26505839 H., & Lee, B. C. Technology-Assisted
20. Hugues A, Di Marco J, Janiaud P, 27. Picelli A, Capecci M, Filippetti M, Ankle Rehabilitation Improves
Bonan I, Gueyffier F, Rode G. Efficiency Varalta V, Fonte C, DI Censo R, Zadra Balance and Gait Performance in
of physical rehabilitation on postural A, Chignola I, Scarpa S, Amico AP, Stroke Survivors: A Randomized
imbalance after stroke: Systematic Antenucci R, Baricich A, Benanti P, Controlled Study With 1-Month
review and meta-analysis. Annals of Bissolotti L, Boldrini P, Bonaiuti D, Follow-Up. IEEE transactions on
Physical and Rehabilitation Medicine. Castelli E, Cavalli L, DI Stefano G, neural systems and rehabilitation
(2016);59:e78. Draicchio F, Falabella V, Galeri S, engineering : a publication of the
21. Pollock, A., Baer, G., Langhorne, P., & Gimigliano F, Grigioni M, Jonsdodttir IEEE Engineering in Medicine and
Pomeroy, V. Physiotherapy treatment J, Lentino C, Massai P, Mazzoleni S, Biology Society, (2018) 26(12),
approaches for the recovery of postural Mazzon S, Molteni F, Morelli S, 2315–2323. https://doi.org/10.1109/
control and lower limb function Morone G, Panzeri D, Petrarca M, TNSRE.2018.2879783
following stroke: a systematic Posteraro F, Senatore M, Taglione E, 33. Min, J. H., Seong, H. Y., Ko, S. H., Jo,
review. Clinical rehabilitation, Turchetti G, Bowman T, Nardone A. W. R., Sohn, H. J., Ahn, Y. H., Son, J.
(2007) 21(5), 395–410. https://doi. Effects of robot-assisted gait training H., Seo, H. Y., Son, Y. R., Mun, S. J.,
org/10.1177/0269215507073438 on postural instability in Parkinson’s Ko, M. H., & Shin, Y. I. Effects of trunk
22. Takakusaki K. Functional disease: a systematic review. Eur J stabilization training robot on postural
Neuroanatomy for Posture and Gait Phys Rehabil Med. (2021) Apr 7. doi: control and gait in patients with
Control. J Mov Disord. 2017 10.23736/S1973-9087.21.06939-2. chronic stroke: a randomized
Jan;10(1):1-17. doi: 10.14802/ 28. Herrero, P., Gómez-Trullén, E. M., controlled trial. International journal
jmd.16062. Epub (2017) Jan 18. PMID: Asensio, A., García, E., Casas, R., of rehabilitation research.
28122432; PMCID: PMC5288669 Monserrat, E., & Pandyan, A. (2012). Internationale Zeitschrift fur
23. Topper AK, Maki BE, Holliday PJ. Are Study of the therapeutic effects of a Rehabilitationsforschung. Revue
activity-based assessments of balance hippotherapy simulator in children internationale de recherches de
and gait in the elderly predictive of risk with cerebral palsy: a stratified single- readaptation, (2020) 43(2), 159–166.
of falling and/or type of fall? J Am blind randomized controlled https://doi.org/10.1097/
Geriatr Soc. (1993) May;41(5):479-87. trial. Clinical rehabilitation, 26(12), MRR.0000000000000399
doi: 10.1111/j.1532-5415.1993. 1105–1113. https://doi. 34. Spina, S., Facciorusso, S., Cinone, N.,
tb01881.x. PMID: 8486878; org/10.1177/0269215512444633 Armiento, R., Picelli, A., Avvantaggiato,
24. Bruno Siciliano, Lorenzo Sciavicco, 29. Chinniah, H, Natarajan, C., Ciritella, C., Fiore, P., & Santamato,
Luigi Villani, Giuseppe Oriolo. M, Ramanathan, R, Ambrose, A. Effectiveness of robotic balance
Robotics: Modelling, Planning and JWF. Effects of horse riding simulator training on postural instability in
Control, Springer (2009) on sitting motor function in children patients with mild Parkinson’s disease:
25. Gandolfi, M., Tinazzi, M., Magrinelli, with spastic cerebral palsy. Physiother A pilot, single blind, randomized
F., Busselli, G., Dimitrova, E., Polo, N., Res Int. (2020); 25:e1870. https://doi. controlled trial. Journal of
Manganotti, P., Fasano, A., Smania, org/10.1002/pri.1870 rehabilitation medicine, (2021) 53(2),
N., & Geroin, C. Four-week trunk- 30. Janura, M., Peham, C., Dvorakova, T., jrm00154. https://doi.
specific exercise program decreases & Elfmark, M. An assessment of the org/10.2340/16501977-2793
forward trunk flexion in Parkinson’s pressure distribution exerted by a rider
disease: A single-blinded, randomized on the back of a horse during Sono stati esclusi dalla presente revisione
controlled trial. Parkinsonism & related hippotherapy. Human movement dispositivi elettromeccanici e robotici per la
disorders, (2019) 64, 268–274. https:// science, (2009) 28(3), 387–393. https:// riabilitazione del cammino.
22 Vol. 36 - N. 3 - Giornale italiano di Medicina RiabilitativaPuoi anche leggere