Fotogrammetria con immagini aeree oblique - sviluppi e prodotti innovativi- Atti Asita
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

Fotogrammetria con immagini aeree oblique
– sviluppi e prodotti innovativi –
D. Poli a, I. Toschi b, K. Moe a, F. Lago b, F. Remondino b, K. Legat c, C. Schreiner c
(a) Terra Messflug GmbH, Eichenweg 42, 6460 Imst, Austria – (k.moe, d.poli)@terra-messflug.at
b
( ) 3D Optical Metrology Unit, Bruno Kessler Foundation (FBK), Trento, Italy – (toschi, lago, remondino)@fbk.eu
c
Vermessung AVT ZT GmbH, Eichenweg 42, 6460 Austria – (c.schreiner, k.legat)@avt.at
Riassunto
L´articolo discute il trattamento fotogrammetrico rigoroso di un blocco di immagini aeree acquisite
con la camera aerea obliqua Vexcel UltraCam Osprey, usando un dataset acquisito sulla citta di
Imst (Austria) nell´ottobre 2015. La camera acquisisce simultaneamente lungo 5 direzioni di vista:
una nadirale e quattro oblique (avanti, indietro, destra e sinistra rispetto alla direzione di volo con
angolo di inclinazione di circa 45°). L´obiettivo del lavoro è mostrare i vantaggi dell´acquisizione
combinata nadirale e obliqua, rispetto alla sola nadirale, sia da un punto di vista geometrico
(attraverso il miglioramento dei risultati della triangolazione aerea - TA), che operativo, per scopi
topografici e cartografici in ambiente urbano. Infatti, se il volo è pianificato secondo opportuni
criteri e tenendo conto della topografia, le zone di superficie occluse o nascoste si riducono
notevolmente, con vantaggi su più aspetti. Innanzitutto, è possibile restituire e digitalizzare elementi
non visibili nelle immagini nadirali, come le impronte degli edifici. Inoltre le nuvole di punti 3D
ottenute con dense image matching includono una porzione maggiore di edificio (facciate) e, di
conseguenza, gli algoritmi di estrazione automatica degli edifici dalle stesse nuvole di punti
presentano prestazioni migliori. Nell´articolo le singole fasi del trattamento fotogrammetrico delle
immagini e l´estrazione di prodotti 3D sono descritte e commentate. I risultati sono confrontati con
opportuni dati di riferimento. Speciale attenzione è dedicata all´adattamento di algoritmi esistenti e
allo sviluppo di nuove soluzioni, come GEOBLy, utile per la restituzione e l´utilizzo delle immagini
oblique per scopi cartografici.
Abstract
This paper discusses the potential of current photogrammetric multi-head oblique cameras, such as
UltraCam Osprey, to improve the efficiency of standard photogrammetric methods for surveying
applications like inventory surveys and topographic mapping for public administrations or private
customers. The photogrammetric workflow, from flight planning to Dense Image Matching (DIM)
and 3D building extraction, is described together with the achieved accuracy. For each step, the
differences and innovation with respect to standard photogrammetric procedures based on nadir
images are shown, including high overlaps, improved vertical accuracy, and visibility of areas
masked in the standard vertical views. Finally the advantages of using oblique images for inventory
surveys are demonstrated.
Introduzione
Quando i primi sistemi commerciali di camere aeree oblique sono apparsi sul mercato all’inizio
degli anni 2000, gli utenti accolsero questa tecnologia con curiosità, ritenendola uno strumento per
funzionalità supplementari (visualizzazione di tetti e facciate da una prospettiva di 360 gradi,
misura di distanze in modalità monoplotting, ecc.), piuttosto che per applicazioni fotogrammetriche.
Da allora, si sono succeduti importanti sviluppi sia a livello hardware (risoluzione spettrale,
ottimizzazione degli angoli di inclinazione delle camere, formato di sensori) che a livello software
565
con lo sviluppo di soluzioni per l’elaborazione dei dati (Remondino and Gerke, 2015). In campo
scientifico, le indagini si sono concentrate sulla geometria di acquisizione (ad es. la relazione tra gli
angoli di vista e le caratteristiche della superficie da rilevare e il ricoprimento tra immagini e
strisciate), sulla qualità delle immagini, sulla precisione della triangolazione aerea (TA) e sulle
potenzialità di algoritmi di Dense Image Matching (DIM) (Jacobsen, 2008; Gerke and Nyaruhuma,
2009; Rupnik et al., 2015).
La società di fotogrammetria aerea Terra Messflug GmbH (TM), parte del gruppo AVT
Vermessung ZT GmbH (Imst, Austria), impiega immagini aeree oblique per migliorare l'efficienza
dei flussi di lavoro standard in applicazioni topografiche, come ad esempio la mappatura di edifici a
scopi catastali. Finora, tali progetti erano eseguiti con misure stereoscopiche su immagini aeree
nadirali, integrate da rilievi terrestri. In collaborazione con la Fondazione Bruno Kessler (FBK) di
Trento è stato realizzato il progetto di ricerca congiunto "GEOBLy" con l´obiettivo di ottimizzare il
flusso di lavoro basato su immagini oblique e sviluppare una soluzione software con funzionalità
specifiche per i progetti di mappatura di AVT. Nel 2015 TM ha eseguito riprese aeree su numerose
aree urbane con il sistema multi-camera UltraCam Osprey della Vexcel Imaging. Utilizzando come
caso-studio il volo eseguito su Imst, in Austria, nell´ottobre 2015, l´articolo presenta la metodologia
utilizzata per il trattamento fotogrammetrico delle immagini nadirali e oblique ed i risultati ottenuti
dall´estrazione automatica di edifici (LOD 2) dalle nuvole di punti 3D. Infine viene anche
presentata un’analisi dei risultati e il confronto con i prodotti ottenuti dal trattamento delle sole
immagini nadirali.
Dataset Imst
L´area del progetto è localizzata a Imst, una cittadina nella provincia del Tirolo, in Austria, e si
estende per 4,5 km x 1,5 km, con quote tra 700 m e 1.000 m (Figura 1).
Figura 1. Vista della città di Imst (© Edgar Figura 2. Sinistra: piano di volo (assi delle
Moskopp, 2014). strisciate, GCPs e impronte delle immagini
sul terreno; destra: distribuzione dei GCPs
(croce blu) e CPs (cerchi rossi).
Il rilievo aerofotogrammetrico è stato eseguito con la camera UltraCam Osprey. Le immagini
nadirali acquisite nella banda pancromatica hanno dimensioni 11674 x 7514 pixel, grazie alla
combinazione di due coni ottici con lunghezza focale 80 mm. L´informazione RGB e NIR è
ottenuta da due coni separati e fusa a quella pancromatica con un´operazione di pan-sharpening
(ratio 2). Le immagini oblique sono acquisite nelle bande RGB (Bayern pattern) da quattro coni
ottici separati e inclinati lungo quattro direzioni di vista cardinali (avanti – F -, indietro – B -,
sinistra – L - e destra - R) con un angolo di circa 45°. Il volo è stato pianificato con GSD medio pari
566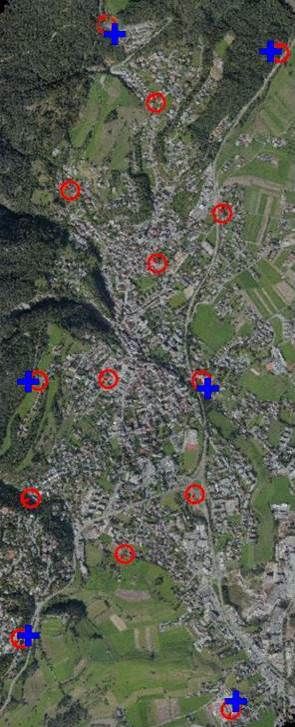
a 6 cm nelle immagini nadirali e ricoprimento del 75% tra le immagini della stessa strisciata e del
60% tra le strisciate adiacenti, per garantire un GSD di 10 cm nelle immagini oblique, limitare le
occlusioni e assicurare che l´intera area di progetto fosse ripresa da cinque direzioni. Con tali
parametri di volo il blocco fotogrammetrico contiene 5 strisciate e un totale di 780 immagini,
ovvero 156 immagini per ogni camera, con scala media 1:7.400 circa (Figura 2). Il volo
aerofotogrammetrico è stato eseguito il giorno 1 Ottobre 2015 con condizioni meteorologiche
ottimali (assenza di nuvole e inclinazione dei raggi solari maggiore di 35°).
Per l´acquisizione dei parametri di posizione e assetto della camera, sono stati utilizzati strumenti
IGI (Aerocontrol IMU II-d 256 Hz con deriva migliore di 0.1°/h) e NovAtel (OEM V-3).
Completano il dataset 20 punti a terra (GCP e CP – Figura 2), misurati con tecnica RTK GNSS con
accuratezza media di 5 cm in planimetria e quota (Figura 2), i modelli 3D in formato vettoriali di
edifici, restituiti usando immagini aeree nadirali di un precedente volo fotogrammetrico, e una
nuvola di punti acquisita da sensore LiDAR aviotrasportato, con densità di tra 10-20 punti per m2.
Analisi delle immagini e triangolazione aerea (TA)
Dall´esame delle impronte delle immagini oblique che coprono la stessa porzione di superficie
(Figura 3), si osserva che, data la simmetria degli angoli di inclinazione tra le camere B/F e L/R, in
combinazione al parallelismo e ai versi opposti delle direzioni di volo delle strisciate adiacenti, le
coppie di immagini prodotte dalle camere B e F da diverse strisciate hanno lo stesso aspect (dove
con il termine “aspect” si intende l´angolo tra la direzione di vista della camera e l´orizzonte); allo
stesso modo le coppie di immagini prodotte dalle camera L e R hanno lo stesso aspect. Al contrario,
l´aspect tra le immagini acquisite dalle camere B e F rispetto a R o L è perpendicolare.
Conseguenza immediata di questa geometria è che immagini con aspect uguale presentano un
contenuto molto simile (ovvero, gli oggetti sul terreno sono visti dalla camera dalla stessa
direzione), mentre immagini con aspect diverso o perpendicolare mostrano lo stesso oggetto da
angolazioni differenti con pochi elementi in comune. La Figura 4 mostra chiaramente la differenza
(o somiglianza) del contenuto nelle coppie di immagini con aspect diverso (o uguale).
F N B
B
L R
Figura 4. Similitudine tra coppie B/F e L/R di
Figura 3. Impronta a terra delle cinque immagini Osprey acquisite in diverse strisciate.
camera Osprey su edificio con sede AVT Zoom su edificio con sede di AVT.
(indicato da punto rosso) in diverse strisciate (Visualizzazione in software GEOBLy).
adiacenti.
L´osservazione dell´aspect spiega la distribuzione del numero di punti omologhi estratti
automaticamente tra coppie di immagini. Il test è stato eseguito con il software Pix4D (ma i risultati
sono confermati dagli altri software usati per la triangolazione aerea). In Tabella 1 per le coppie di
immagini con lo stesso aspect (celle verdi e gialle) il numero di punti omologhi è ben superiore di
quello ottenuto con coppie di immagini con aspect diverso (celle arancioni e azzurre).
567
Tabella 1. Valori mediani e massimi dei punti omologhi estratti tra immagini di viste diverse.
Backward Forward Right Left Nadir
B 3547/22919 399/8321 4/40 6/44 23/2305
F 3291/25305 2/27 2/45 8/1405
R 3774/22203 429/8849 125/2837
L 701/22845 133/4254
N 1366/25796
Stessa camera Stesso aspect, camere oblique Aspect perpendicolare, camere oblique Diverso aspect, camera nadirale + oblique
A completamento dell´analisi della geometria di acquisizione, e come operazione preliminare alla
stima dell´orientamento delle immagini, è stata analizzata la qualità delle misure GNSS/IMU degli
strumenti a bordo e dei parametri di calibrazione della camera. Come approccio matematico, si è
scelto di andare oltre lo schema generalmente seguito nel caso di camere oblique, ovvero
considerare le cinque camere indipendenti l´una dall´altra, ma si è voluto descrivere il sistema come
la combinazione di una camera nadirale e di quattro camere oblique, legate alla prima da offset e
rotazioni relative note dalla calibrazione in laboratorio.
Non essendo disponibili sul mercato soluzioni software che permettessero di lavorare con questo
modello matematico, FBK ha sviluppato una soluzione per la stima delle coordinate 3D dei punti
basata sull´intersezione dei raggi omologhi di camere nadirali e oblique (forward intersection), in
cui la posizione e gli angoli di assetto delle camere oblique sono la combinazione della posizione e
degli angoli di assetto della camera nadirale (disponibili da GNSS/IMU a bordo) e di offset e
rotazioni relative (calcolate dai parametri di calibrazione). Le coordinate 3D stimate dei punti a
terra sono state confrontate con quelle strumentali e i risultati riassunti in Tabella 2. Gli RMSE
(Root Mean Square Errors) in planimetria sono dell´ordine dei 20 cm, in linea con le accuratezze
strumentali, sia usando solo le immagini nadirali (prima riga della tabella) sia usando le immagini
nadirali e oblique (seconda riga della tabella). L´introduzione delle immagini oblique ha un effetto
positivo sulla stima della quota, la cui accuratezza migliora da 40 cm (solo immagini nadirali) a 23
cm (immagini nadirali e oblique).
La triangolazione aerea è stata eseguita con tre software commerciali: Match-AT (Match-AT,
2016), UltraMap AT (Gruber, 2015) e Pix4D (Pix4D, 2016). Sulla base delle accuratezze
strumentali e dell´esperienza con progetti precedenti, alle osservazioni sono stati assegnati i
seguenti valori di deviazione standard a-priori: 5 cm in planimetria e 7 cm in altezza per i punti a
terra, 10 cm in planimetria e 15 cm in altezza per le osservazioni GNSS, 0.002° per omega e phi, e
0.005° per kappa, 3 m per le coordinate dei punti di legame estratti automaticamente e 5 m per le
coordinate dei punti di legame misurati manualmente. La triangolazione è stata eseguita con self-
calibration, usando 6 punti di appoggio (GCPs) e 14 punti di controllo indipendenti (CPs).
Tabella 2. Risultati della forward intersection e TA delle immagini nadirali (N) e oblique (O) del
dataset Imst. Gli RMSE si riferiscono a 14 CPs indipendenti.
Immagini RMSE X [m] RMSE Y [m] RMSE Z [m]
Forward Intersection N 0.216 0.200 0.400
Forward Intersection N+O 0.230 0.212 0.227
TA N 0.044 0.028 0.089
TA N+O 0.035 0.027 0.058
568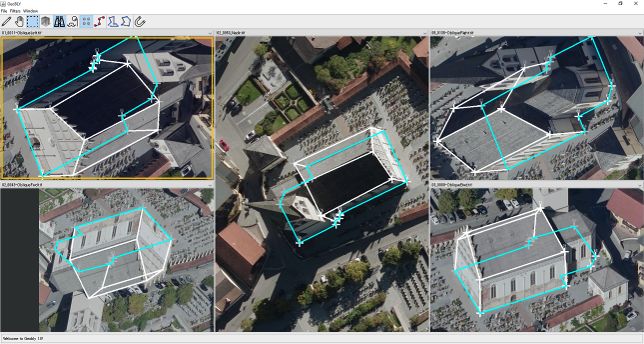
Tabella 3. Tempi della TA usando immagini a scala 0.5 e 0.25 rispetto alla risoluzione originale
(scala 1.0). Il tempo è rappresentato in % rispetto al tempo impiegato con immagini a scala 1.0.
Scala delle RMSE [m]
Tempo di trattamento
immagini X/Y/Z
TA 0.5 (1/2) 63% 0.045/0.027/0.066
(N + O) 0.25 (1/4) 34% 0.048/0.029/0.071
I risultati ottenuti dai tre software commerciali sono molto simili, nonostante l´approccio diverso.
Pertanto in Tabella 2 (righe 3 e 4) sono riportati solo i risultati raggiunti con il software Pix4D. Si
osserva che gli RMSE in planimetria sono dell´ordine dei 3-4 cm sia usando solo le immagini
nadirali, sia introducendo le immagini oblique. Come già osservato con la forward intersection,
l´introduzione delle immagini oblique ha benefici evidenti in quota (da ca 9 cm a ca 6 cm), poiché
migliora la geometria di intersezione dei raggi omologhi.
Infine è stato preso in considerazione il costo computazionale della TA in funzione della
dimensione delle immagini. La TA è stata ripetuta estraendo i punti omologhi da immagini
ricampionate con fattori 2 e 4, ed i risultati confrontati con quelli ottenuti dalle immagini originali.
Come riportato in Tabella 3 si osserva una riduzione dei tempi di trattamento fino al 68%, senza
alterare in modo significativo l´accuratezza dei risultati ottenuti (valori RMSE dei CPs).
Nuvola di punti 3D
A partire dai risultati della triangolazione aerea (ovvero, i parametri di orientamento interno ed
esterno delle immagini), è stata ricostruita la superficie sotto forma di nuvola densa di punti 3D, allo
scopo di rappresentare l’ambiente urbano in modo accurato e facilmente gestibile. In applicazioni
catastali, la modellazione delle facciate e degli ingombri a terra degli edifici è spesso difficile
poiché questi oggetti possono essere parzialmente nascosti nelle immagini nadirali. Per risolvere
tale problematica, può essere efficacemente usato il DIM con il contributo delle immagini oblique,
in quanto esse permettono di superare le limitazioni legate all’angolo di vista. Dal punto di vista
algoritmico, però, ciò significa affrontare alcune note difficoltà tipiche del matching in scenari
“obliqui”, ovvero significative variazioni di scala e di luminosità, occlusioni derivanti da molteplici
ostacoli, ecc. (Rupnik et al., 2014). Inoltre, è necessario sostituire il tradizionale approccio 2.5D per
l’estrazione del modello digitale della superficie (DSM) da immagini nadirali, con un processing
che sfrutta l’intero spazio tridimensionale. Ciò è possibile tramite alcuni software commerciali
(Haala and Rothermel, 2015), che utilizzano sia immagini nadirali che oblique per l’estrazione di
dense nuvole di punti (Tutzauer and Haala, 2015; Remondino et al., 2016).
Per estrarre la nuvola di punti densa della città di Imst è stato utilizzato Pix4D con il suo algoritmo
di DIM. Allo scopo di giungere ad un efficace compromesso tra i tempi di calcolo e la densità della
ricostruzione 3D, è tato scelto di utilizzare le immagini ridotte ad ¼ della loro risoluzione iniziale,
adottando un approccio multi-scala. Inoltre sono stati processati separatamente i blocchi, con e
senza l’inclusione delle immagini oblique, per verificare il contributo apportato da queste ultime al
risultato finale del DIM. Le nuvole di punti estratte sono caratterizzate da una densità media di
8.93 punti/m³ (solo immagini nadirali) e 10.88 punti/m³ (immagini nadirali ed oblique). La Figura 5
mostra la ricostruzione 3D ottenuta utilizzando sia le immagini nadirali sia quelle oblique (a
sinistra) e due viste dettagliate di un blocco di edifici ricostruiti senza e con il supporto delle
immagini oblique (a destra).
Per verificare la correttezza della nuvola, i profili delle nuvole di punti lungo una sezione in
corrispondenza di un gruppo di edifici sono stati confrontati con i risultati derivanti dal LiDAR.
Come mostrato in Figura 6, è evidente un significativo miglioramento nella ricostruzione delle
facciate degli edifici nel caso in cui le immagini oblique siano incluse nel blocco ed utilizzate nel
matching.
569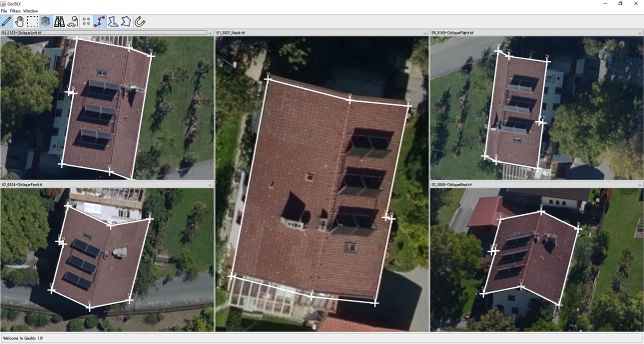
b)
a)
c)
Figura 5. Vista della nuvola di punti 3D del dataset Imst estratta con Pix4D utilizzando le immagini
nadirali e oblique (a); zoom in nuvola di punti 3D estratta usando solo le immagini nadirali (b);
zoom in nuvola di punti 3D estratta usando le immagini nadirali e oblique (c).
Figura 6. Profili verticali (a destra) estratti dalle nuvole LiDAR (in alto), da quelle derivanti da
DIM delle immagini nadirali (in centro) e con l’inclusione delle oblique (in basso). La sezione di
taglio è indicata in giallo nell’ortofoto (a sinistra).
Estrazione automatica degli edifici
Allo scopo di ottenere un prodotto adatto ad essere gestito e “interrogato” in ambiente GIS, è
necessario ridurre la complessità di dati insita nella nuvola di punti, estraendo delle forme
geometriche di interesse. In ambito catastale, tali forme sono rappresentate dai modelli 3D degli
edifici, per ricostruire i quali diversi approcci possono essere adottati da un punto di vista
algoritmico (Haala and Kada, 2010), quali: (i) ricostruzione da forme parametriche, (ii)
ricostruzione basata sulla segmentazione della nuvola di punti e (iii) ricostruzione tramite
semplificazione del modello DSM poligonale. Nel caso di Imst, si è scelto di adottare il secondo
approccio, utilizzando la suite di tool tridicon/Hexagon (tridicon, 2016). Tra i diversi moduli inclusi
nella suite, “BuildingFinder” è risultato essere quello più appropriato per il caso in esame: esso
estrae il modello LOD2 degli edifici (Gröger and Plümer, 2012) “confrontando” la nuvola con
forme parametriche presenti nella sua libreria (espandibile dall’utente), senza richiedere in input la
cartografia vettoriale con le impronte degli edifici. La procedura è stata ripetuta a partire da
entrambe le nuvole di punti, ovvero quella estratta dalle immagini nadirali e quella derivante dal
blocco di immagini nadirali ed oblique.
Adottando come riferimento i modelli 3D ricostruiti manualmente con approccio tradizionale
(restituzione stereoscopica), l’accuratezza dei risultati ottenuti è stata valutata sia tramite confronto
570
geometrico che con ispezione visiva. I risultati ottenuti (Moe et al., 2016), mostrano che
l’inclusione delle viste oblique permette generalmente di ricostruire modelli 3D più dettagliati,
come dimostra l’esempio riportato in Figura 7. Tuttavia, è necessario sottolineare che allo stato
attuale il software adottato non è in grado di utilizzare i punti presenti lungo le facciate per
supportare l’estrazione degli edifici.
Figura 7. Esempio di confronto tra i modelli (LOD2) estratti utilizzando immagini nadirali ed
oblique (in viola) e solo immagini nadirali (in arancio). A sinistra, l’edificio scelto è visualizzato
sull’ortofoto e ricostruito tramite restituzione stereoscopica (modello di riferimento, in verde).
Applicazioni per mappatura egli edifici
Il principale vantaggio della disponibilità di immagini aeree oblique, soprattutto in ambiente
urbano, è la possibilità di osservare gli edifici ed altri manufatti di interesse da più direzioni e,
quindi, di mappare in 3D molti elementi presenti sui tetti e sulle facciate degli edifici, le impronte
degli edifici, elementi sulle strade (es. tombini, bordi, muri) e su altre infrastrutture, generalmente
non visibili nelle immagini nadirali. Se il volo è pianificato con i giusti accorgimenti, le occlusioni
sulla superficie possono essere ridotte, fermo restando che solo in particolari casi fortunati sono
eliminate del tutto. In ogni caso, parte del rilievo, solitamente eseguito a terra da squadre di lavoro,
può essere sostituito da restituzione fotogrammetrica in laboratorio con accuratezze che rientrano
nelle specifiche tecniche cartografiche di riferimento.
Un ostacolo all´utilizzo delle immagini oblique per tali scopi cartografici era la mancanza sul
mercato di un software per la restituzione. All´interno del progetto GEOBLy, AVT e FBK hanno
sviluppato uno strumento molto utile per gli operatori, che permette di visualizzare le immagini
oblique, misurare distanze, aree e volumi, e modellare oggetti in 3D, con elevata accuratezza e con
diversi approcci (Figura 8).
Figura 8. Mappatura in GEOBLy. Sinistra: mappatura tradizionale di un tetto; destra: mappatura
delle impronte degli edifici.
Conclusioni
Le nuove camere aerofotogrammetriche oblique disponibili sul mercato hanno un´elevata
potenzialità per mappature e applicazioni cartografiche. I test eseguiti da AVT e FBK su un dataset
acquisito con la camera Vexcel UltraCam Osprey sulla cittadina di Imst (Austria) hanno mostrato
571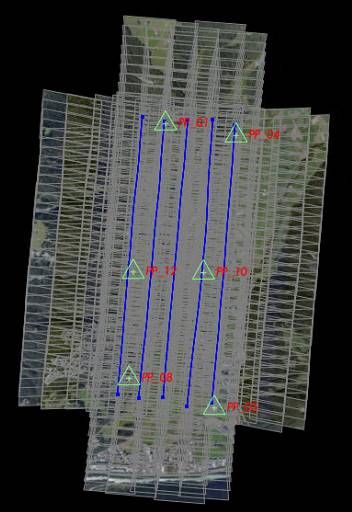
che, seguendo una procedura rigorosa, i risultati della triangolazione aerea sono confrontabili, se
non migliori, a quelli ottenuti dai voli tradizionali nadirali. Le nuvole di punti 3D estratte
automaticamente con algoritmi di dense image matching permettono di modellare la superficie e gli
edifici in modo più completo, includendo anche le facciate e altri elementi generalmente nascosti.
Ciò è confermato dalla miglior performance di algoritmi di estrazione automatica degli edifici da
nuvole di punti, ad es. Tridicon. In generale, la disponibilità di prese oblique consente di ridurre le
occlusioni nelle immagini e mappare in laboratorio elementi generalmente rilevati a terra. Grazie
alla collaborazione tra AVT e FBK, il software GEOBLy sviluppato da FBK consente agli operatori
di restituire in modo accurato nelle immagini oblique, secondo i bisogni operativi.
Ringraziamenti
Il lavoro è stato in parte finanziato dalla Provincia del Tirolo (Austria) attraverso il programma
scientifico “Tiroler Innovationsförderung”. Gli autori ringraziano Vexcel Imaging GmbH per il loro
supporto scientifico e tecnico e Tridicon/Hexagon per aver fornito la licenza del software di
modellazione degli edifici da nuvole di punti.
Riferimenti bibliografici
Gerke, M. and Nyaruhuma, A. (2009). “Incorporating scene constraints into the triangulation of
airborne oblique images”, The Int. Archives of Photogrammetry, Remote Sensing & Spatial
Information Sciences, Vol. XXXVIII, Part 1-4-7/W5.
Gröger, G. and Plümer, L. (2012). “CityGML – Interoperable semantic 3D city models”. ISPRS
Journal of Photogrammetry and Remote Sensing, 71:12-33.
Gruber, M. (2015). “Ultracam Osprey - nadir meets oblique”. In EUROSDR/ISPRS workshop
“Oblique cameras and dense image matching”, October 2015, Southampton, UK.
www.eurosdr.net/workshops/eurosdrisprs-workshop-oblique-cameras-and-dense-image-matching
Haala, N. and Kada, M. (2010). “An update on automatic 3D building reconstruction”, ISPRS
Journal of Photogrammetry and Remote Sensing, 65(6): 570-580.
Haala, N. and Rothermel, M. (2015). “Image-based 3D Data Capture in Urban Scenarios”, Proc.
Photogrammetric Week 2015, D. Fritsch (Ed.), 119-130.
Jacobsen, K. (2008). “Geometry of vertical and oblique image combination”, Remote Sensing for a
Changing Europe: Proceedings of the 28th Symposium of the European Association of Remote
Sensing Laboratories, Istanbul, Turkey.
Match-AT (2016). www.trimble.com (ultimo accesso Ottobre 2016).
Moe, K., Toschi, I., Poli, D., Lago, F., Schreiner, C., Legat, K. and Remondino, F. (2016).
“Changing the Production Pipeline - Use of Oblique Aerial Cameras for Mapping Purposes”, Int.
Archives of Photogrammetry, Remote Sensing & Spatial Information Sciences, XLI-B4: 631-637.
Pix4D (2016). www.pix4d.com (ultimo accesso Ottobre 2016).
Remondino, F., Gerke, M. (2015). “Oblique Aerial Imagery – A Review”, Proc. Photogrammetric
Week 2015, D. Fritsch (Ed.), 75-83.
Remondino, F., Toschi, I., Gerke, M., Nex, F., Holland, D., McGill, A., Talaya Lopez, J.,
Magarinos A. (2016). “Oblique aerial imagery from NMA – Some best practices”, International
Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, XLI-B4: 639-645.
Rupnik, E., Nex, F. Remondino, F. (2014). “Oblique multi-camera systems – orientation and dense
matching issues”, The Int. Archives of Photogrammetry, Remote Sensing & Spatial Information
Sciences, XL(3/W1):107-114.
Rupnik, E., Nex, F., Toschi, I. Remondino, F. (2015). “Aerial multi-camera systems: Accuracy and
block triangulation issues”, ISPRS Journal of Photogrammetry and Remote Sensing, 101: 233-246.
tridicon (2016). http://leica-geosystems.com/ (ultimo accesso Ottobre 2016).
Tutzauer, P. and Haala, N. (2015). “Façade Reconstruction Using Geometric and Radiometric
Point Cloud Information”, The International Archives of Photogrammetry, Remote Sensing and
Spatial Information Sciences, XL-3(Part W2): 247-252.
572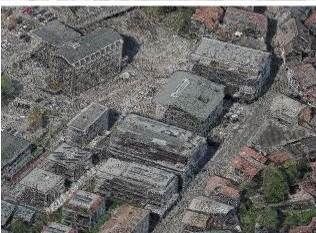

Puoi anche leggere