DIPARTIMENTO DI STUDI UMANISTICI
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
DIPARTIMENTO DI STUDI UMANISTICI
Corso di Laurea Interdipartimentale in Scienze
della Formazione Primaria( Ind.Primaria)
A.A 2013/2014
REPORT SULL’ ELABORAZIONE DI UN
AGENTE ARITIFICIALE
TEORIA E METODOLOGIA DEL MOVIMENTO UMANO
Prof. ELEONORA BILOTTA
STUDENTESSA : CACCAVANO TERESA matr.143499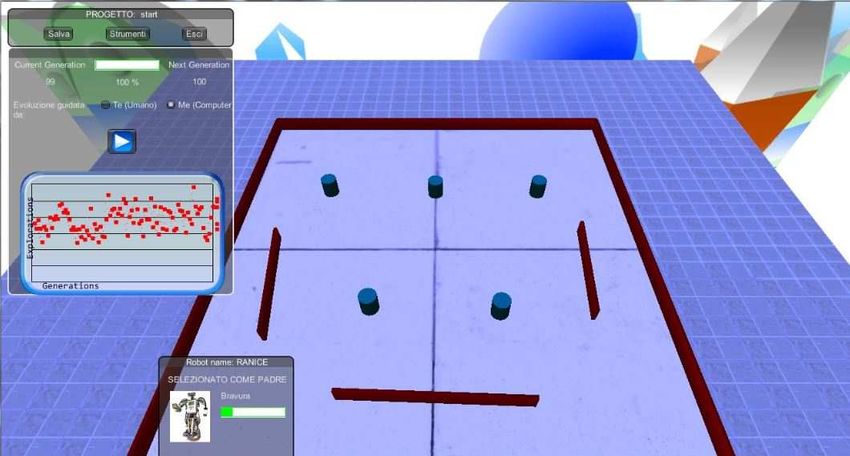
REPORT primaria • La Robotica è una scienza che si occupa in primis di studiare ,sviluppare metodologie che permettano ad un Robot o ad un agente di eseguire dei compiti specifici. La disciplina che si occupa di studiare agenti intelligenti e robot si definisce “ Intelligenza Artificiale”. L’agente che ho costruito, grazie all’ utilizzo del programma software BRAIN FARM , è in grado di interagire con l’ ambiente circostante , reattivo agli stimoli (cilindri e muri, i quali costituiscono l’ ostacolo ); sarà capace di prendere decisioni e di agire in modo autonomo , con il fine di raggiungere un obiettivo ( GOAL), diventando un agente PROATTIVO ; soprattutto in grado di comunicare con gli altri agenti , sviluppando una notevole capacità cooperativa . L’ ipotesi di lavoro svolta si avvale del METODO SCIENTIFICO , attraverso un osservazione sistematica dell’ esperienza che si sta svolgendo . Avviene una prima osservazione , la quale si basa su una accurata osservazione sistematica , seguita dall’ esperimento , ovviamente sviluppato in maniera controllata. Nel lavoro svolto , è stato necessario fare 5 simulazioni (esperimenti) per convalidare, CONFUTARE , le diverse ipotesi , protese a spiegare l’ intelligenza di un agente, come possa differenziarsi col variare di alcuni parametri nella fase di progettazione. Con la convalida dell’ ipotesi , si procede con l’esecuzione degli esperimenti , in maniera tale che i risultati siano attendibili, i dati ed i grafici raccolti sono stati elaborati ed in seguito trasformati in teoria . • L’esperimento è stato impostato nel seguente modo : Da programmatore , il mio compito è stato che l’ intera progettazione dell’ agente doveva essere decomposta in comportamenti reattivi : evitare ostacoli seguire muri, esplorare l’ ambiente. Il mio ruolo è stato importante poiché ero la mente che pianificava a priori le azioni , i movimenti del robot innanzi agli ostacoli ( 5 cilindri – 3 muri). Conforme alla Robotica Evolutiva , mi sono avvalsa di utilizzare e modificare delle reti neurali. Ho iniziato l’ esperimento nello scegliere il corpo dei 4 tipi di robot disponibili dal software; la mia scelta fu il corpo del robot NXT , apportando dei cambiamenti alla rete neurale interna , la quale funge da simulazione al sistema nervoso di un organismo umano , costituito da un certo numero di neuroni artificiali che scambiano segnali tra di loro attraverso delle connessioni . La rete neurale del mio agente artificiale , denominato START, fu composta da :
- OUTPUT NEURONS : 2
- INTERNAL NEURONS : 2
- INFRARED SENSORS : 3
- GROUND SENSORS : 0
- CAMERA SENSORS : 0
Affinché il comportamento di una rete neurale , ovvero il tipo di risposte agli stimoli
che essa produce , è determinante da fattori come : regola di attivazione , pesi sinaptici,
architettura della rete ; i quali sono fondamentali per ottenere i comportamenti che si
erano preposti , purché si proceda attraverso i processi d’ apprendimneto ed attraverso
l’ evoluzione artificiale .
Dopo aver stabilito e creato la nuova struttura cognitiva , ho creato l’ ambiente in cui
l’ organismo vive ,con cui interagisce e nel quale dovrà cercare di superare gli eventuali
ostacoli , far lavorare la sua PERCEZIONE ATTIVA .
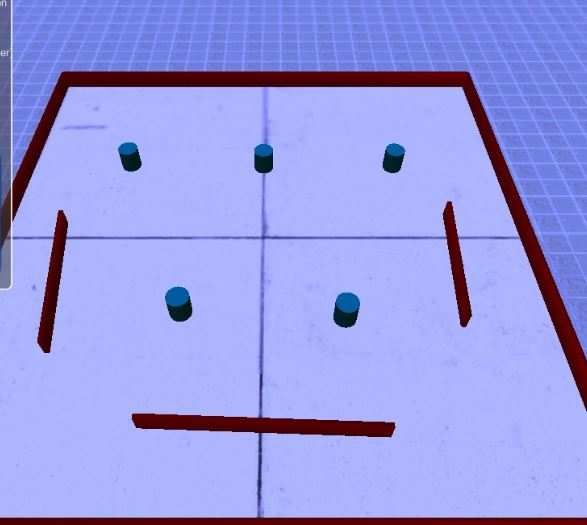
L’ambiente , come dimostra la foto sotto riportata , è costituito da 5 cilindri disposti
parallelamente e da 3 muri da evitare .
Dopo questa fase , ho scelto la modalità d’addestramento , definendo dei nuovi
parametri di evoluzione , ogni qualvolta diversi per le 5 simulazioni ; una volta
deciso e stabilito la mia IPOTESI DI LAVORO , si progetta l’ ESPERIMENTO,
si addestra il mio piccolo agente “START” .
Ispirandoci al modello computazionale che si ispira all’ Evoluzione di Darwin,
sul principio della variazione genetica e selezione naturale , si valutano i risultati
della prima evoluzione , se il mio robot avrà un patrimonio genetico in grado di
adattarsi all’ ambiente (fitness), possiamo dedurre che gli individui con
maggiore fitness sono mediamente favoriti (selezione naturale ) rispetto agli
altri.Infatti la qualità di un individuo , in questo caso dell’ agente artificiale ,
l’ho misurata attraverso la funzione di fitness, la quale mi ha indicato mediante
grafici e calcoli , l’ adattabilità all’ambiente di START.
In ordine di sequenza riporto i 6 ESPERIMENTI svolti (struttura cognitiva –
ambiente , non hanno subito nessuna modifica )
1° ESPERIMENTO BASE :
I parametri di evoluzione furono :
Genitori :3 Figli : 3 Generazioni 100 Lunghezza della vita : 100
Mutazione Genetica : bassa
2 ° esperimento :
I parametri di evoluzione furono :
Genitori : 5 Figli : 5 Generazioni : 100 Lunghezza della vita : 100
Mutazione Genetica : bassa
3 ° Esperimento :
I parametri di evoluzione furono :
Genitori : 3 Figli : 5 Generazioni : 100 Lunghezza della vita:100
Mutazione genetica : bassa
4° ESPERIMENTO :
I parametri di evoluzione furono :
Genitori : 6 Figli : 3 Generazioni : 100 Lunghezza della vita : 100
Mutazione Genetica : bassa
5 ° Esperiemento :
I parametri d’ evoluzione furono :
Genitori : 6 Figli : 12 Generazioni : 200 Lunghezza della vita: 200
Mutazione genetica : bassa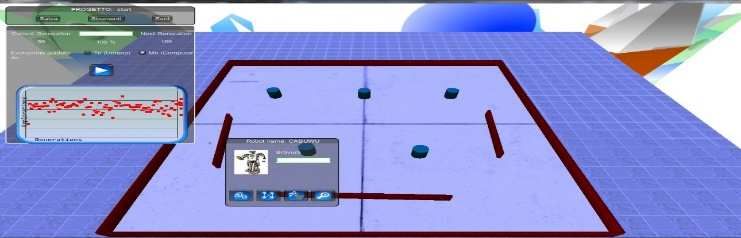
6 ° ESPERIMENTO : I parametri di evoluzione furono : Genitori : 7 Figli : 5 Generazioni : 100 Lunghezza della vita : 100 Mutazione Genetica : bassa I dati ed i risultati sono stati allegati nel file FITNESS , con i relativi grafici . Riporto i valori ottenuti dalla curva di fitness : 1° esperimento : 18 ,22…. 2° esperimento : 12 , 52… 3° esperimento : 14, 73... 4° esperimento : 20 5° esperimento : 15,77 6 ° esperimento : 13,0
Gli individui più forti sono quelli con fitness (idoneità più alta , poiché risolvono meglio di altri il
problema dato , per tal motivo devono essere privilegiati nella fase di selezione , così da potersi
riprodurre e dare luogo ad una nuova generazione . Dai valori sopra riportati , la mia teoria è, che
lasciando per tutti i 6 esperimenti la stessa rete neurale (memoria interna ), un ambiente da esplorare
con ostacoli , l’ agente sarà in grado di percepire l’ambiente che lo circonda.
Gli esperimenti hanno avuto un esito positivo , cambiando i parametri di evoluzione e la modalità d’
addestramento , si riporta un idoneità maggiore nell’ esperimento 4, generazione appartenente a 6
genitori /3 figli /Generazione e Lunghezza vita :100 , dove la distribuzione è stata più omogenea .
• Il lavoro è stato svolto singolarmente , non mi sono aggregata a nessun gruppo
• Al robot ho apportato le modifiche nella struttura cognitiva , all’ ambiente nel
quale sviluppa la sua evoluzione ed interazione , ho cambiato ogni qualvolta
rifacevo i 6 esperimenti modifiche ai parametri di evoluzione , ovvero la
popolazione dei genitori e dei figli ,per calcolare i diversi genotipi .
• Alla simulazione ho apportato le modifiche iniziali del corpo del ROBOT NXT,
l’ addestramento e i parametri .
• Ho incontrato diversi problemi iniziali nell’ impostare il software , poiché era la
prima volta in cui mi cimentavo in una cosa del genere , il tempo di prendere
dimestichezza con il programma , è stato alquanto piacevole ,soprattutto perché
in un futuro lo potrò far utilizzare ai miei futuri allievi di Scuola Primaria .
Attraverso la tecnologia , si apprende il sistema nervoso centrale ed i vari sistemi
di selezione ,ecc…
• La soluzione adottata è stata quella di lavorare utilizzando il metodo
scientifico, ovvero dopo svariate prove ed errori , ipotesi , sono arrivata alla
mia teoria .
• Per raggiungere l’obiettivo prefissato (GOAL) ho dovuto modificare la
simulazione ed i parametri di evoluzione 3 volte .
• Il mio lavoro è stato individuale , quindi la modalità di lavoro è stata
completamente autonomaPuoi anche leggere