DBLS-01S User Manual Brushless DC Motor Driver - Leggere attentamente le istruzioni per l'uso prima di mettere in funzione l'autista con ...
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù

User Manual
DBLS-01S
Brushless DC Motor Driver
©2021 All Rights Reserved
Leggere attentamente le istruzioni per l'uso prima di mettere in funzione l'autista con l'alimentazione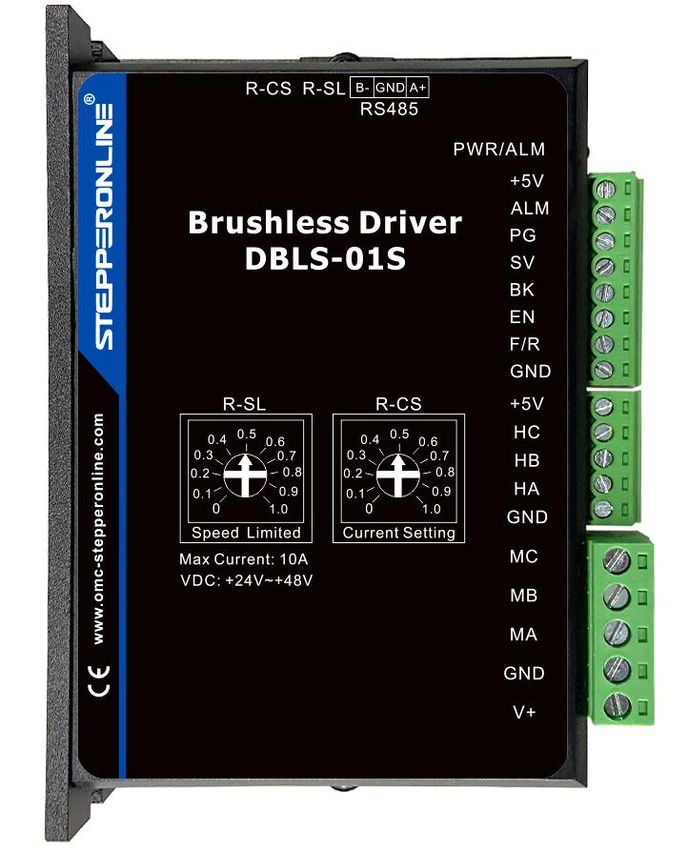
DBLS-01S BLDC Driver
1. Riassunto
Questo driver per motori brushless è un driver sviluppato autonomamente da STEPPERONLINE per
cooperare con il campo del moderno controllo automatico industriale. Utilizza principalmente chip driver
dedicati ad alte prestazioni per motori DC senza spazzole, caratterizzati da alta integrazione, piccole
dimensioni, protezione completa, cablaggio semplice e chiaro e alta affidabilità. Il driver è adatto a
motori DC brushless di piccole e medie dimensioni con una potenza nominale inferiore a 200W. Il driver
utilizza una nuova tecnologia PWM per far funzionare il motore brushless con alta velocità, basse
vibrazioni, basso rumore, buona stabilità e alta affidabilità.
2. Caratteristiche
Alte prestazioni e prezzo basso
Velocità PID, regolatore corrente a doppio ciclo
Frequenza del chopper 20KHZ
capacità di sovraccarico di 2 volte
Costruire con sovratensione, sottotensione, sovracorrente, sovratemperatura, segnale Hall
illegale e altre funzioni di allarme di errore
3. Indicatori elettrici
Tensione di guida: 9~55VDC, tensione raccomandata: 24VDC-48VDC
Tensione d'ingresso 24VDC 36VDC 48VDC
Corrente di uscita continua 8.3A 5.5A 4.2A
Potenza di uscita massima 200W 200W 200W
Corrente di uscita di picco 13A/3S 13A/3S 13A/3S
La costante del tempo di accelerazione: Default: 1 secondo, altri possono essere personalizzati, si
prega di controllare con il supporto tecnico.
Nota:
Questo prodotto è un'apparecchiatura elettrica professionale e dovrebbe essere installato, messo a
punto, azionato e mantenuto da personale professionale e tecnico. L'uso improprio causerà scosse
elettriche, incendi, esplosioni e altri pericoli.
Questo prodotto è alimentato da un alimentatore DC, si prega di confermare che i poli positivi e
negativi dell'alimentatore siano corretti prima di accenderlo.
Non collegare o scollegare il cavo di collegamento quando l'alimentazione è accesa, e non è permesso
il cortocircuito del cavo quando l'alimentazione è accesa, altrimenti il prodotto sarà danneggiato.
Se il motore deve cambiare direzione mentre è in funzione, deve prima decelerare fino all'arresto e
poi cambiare direzione.
1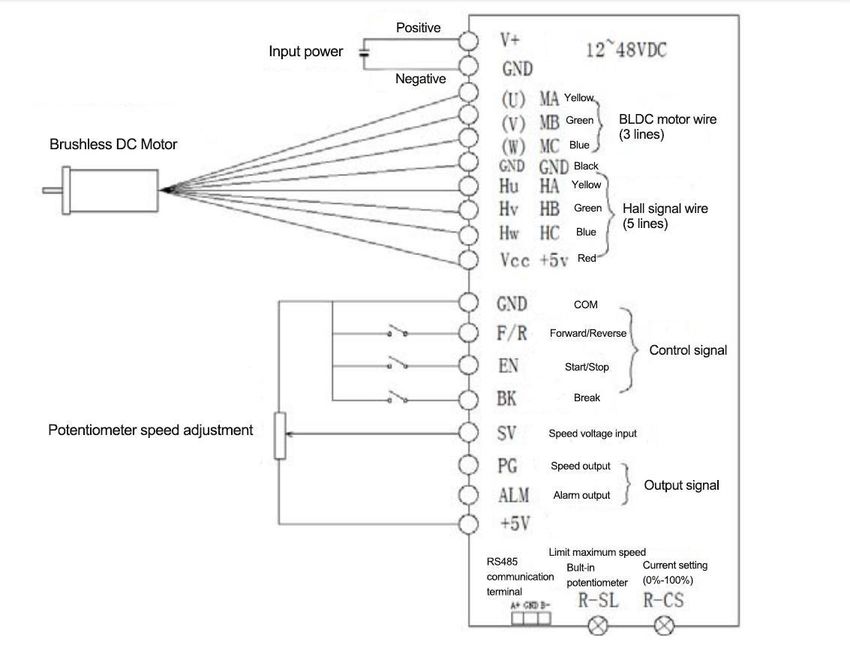
DBLS-01S BLDC Driver
Il driver è un dispositivo di potenza, cercare di mantenere la dissipazione del calore e la ventilazione
dell'ambiente di lavoro.
Descrizione dell'interfaccia del terminale
1)Ingresso alimentazione
No. Nome del terminale Descrizione
1 V+ Ingresso 24VDC~48VDC
2 GND Ingresso GND
2)Ingresso motore
No. Nome del terminale Descrizione
1 MA Fase A del motore
2 MB Fase B del motore
3 MC Fase C del motore
4 GND GND
5 HA Ingresso fase A del segnale di Hall
6 HB Ingresso fase B del segnale Hall
7 HC Ingresso fase C del segnale Hall
8 +5V Linea di alimentazione del segnale Hall
3)Segnale di controllo
No. Nomedelterminale Descrizione
1 GND Terra del segnale
2 F/R Terminale CW/CCW
3 EN Terminale Stop/Start
4 BK Terminale del freno
5 SV Terminale di ingresso del segnale analogico
6 PG Terminale di uscita della velocità
7 ALM Terminale di uscita dell'allarme
8 +5V Terminale di uscita dell'alimentazione +5V
Potenziometro incorporato R-SI: Regola il guadagno di velocità del motore, che può essere regolato
da 0~100%.
Potenziometro incorporato R-CS: Impostazione della corrente massima di protezione, il
potenziometro incorporato può essere impostato 0%~100% di protezione della corrente continua.
2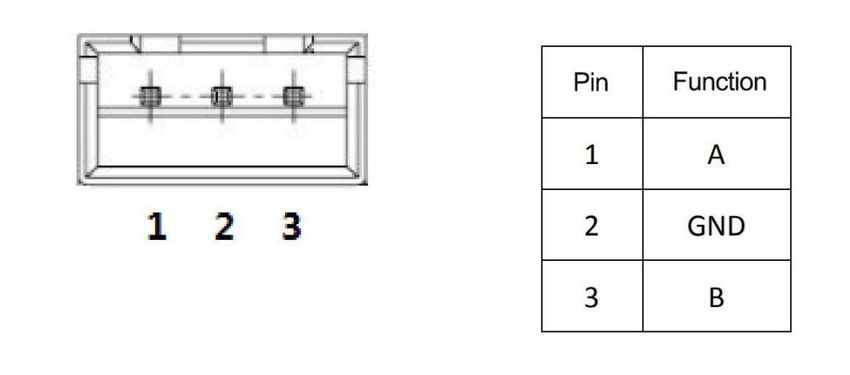
DBLS-01S BLDC Driver
4. Disegni di installazione della macchina:
5.Funzione e uso
Metodo di regolazione della velocità
Il driver offre i seguenti tre metodi di regolazione della velocità, uno dei quali può essere selezionato
dall'utente come segue:
Regolazione della velocità con potenziometro interno: girare il potenziometro sul pannello
dell'azionamento in senso antiorario per ridurre la velocità del motore e in senso orario per
aumentarla. Il potenziometro deve essere regolato al minimo quando l'utente utilizza un ingresso
esterno per la regolazione della velocità.
Regolazione della velocità da ingresso esterno: collegare i due terminali fissi del potenziometro
esterno rispettivamente ai terminali GND e +5v del driver, e collegare il terminale di regolazione al
terminale SV per regolare la velocità utilizzando il potenziometro esterno (10K~50K), o attraverso
altre unità di controllo (ad esempio PLC, microcontroller, ecc.) per immettere la tensione analogica al
terminale SV per ottenere la regolazione della velocità (rispetto a GND), la porta SV accetta una
gamma di DC 0V~+5V, corrispondente alla velocità di rotazione del motore di 0~velocità nominale.
Un segnale digitale esterno può anche essere usato per regolare la velocità: Un segnale digitale a
larghezza di impulso (PWM) con un'ampiezza di 5V e una frequenza da 1KHz a 2KHz può essere
applicato tra SV e GND per la regolazione della velocità, e la velocità del motore viene regolata
linearmente secondo il duty cycle. In questo caso, l'ampiezza del segnale digitale SV può essere
attenuata regolando il potenziometro R-SI in un rapporto da 0 a 1,0, solitamente impostando R-SI a
1,0. Nessuna attenuazione è applicata al segnale digitale di ingresso SV.
3DBLS-01S BLDC Driver
La velocità del motore può anche essere modificata da un comando tramite il metodo di
comunicazione.
Controllo marcia/arresto del motore (EN)
Il motore può essere controllato per funzionare e fermarsi controllando l'accensione e lo spegnimento
del terminale EN in relazione a GND. Il motore gira quando il terminale è acceso e viceversa il motore
si ferma. Quando il motore viene fermato usando il controllo del terminale di marcia/arresto, il
motore si ferma naturalmente. La legge del movimento è legata all'inerzia del carico.
Controllo avanti/indietro del motore (F/R)
La direzione del funzionamento del motore può essere controllata controllando il collegamento del
terminale F/R al terminale GND. Quando F/R e il terminale GND non sono attivati, il motore funziona
in senso orario (rivolto verso l'albero motore), e viceversa, il motore funziona in senso antiorario. Per
evitare danni all'azionamento, quando si cambia lo sterzo del motore, il motore deve essere fermato
prima di operare per cambiare lo sterzo. Cambiare la direzione di funzionamento mentre il motore è
in funzione dovrebbe essere evitato.
Arresto di frenata ( BK )
L'arresto di frenata del motore può essere controllato dal collegamento del terminale di controllo BK
al terminale GND. Quando il terminale di controllo BK è scollegato dal terminale GND, il motore
funziona, quando viene acceso il motore frena rapidamente fino all'arresto, l'arresto di frenata è più
veloce dell'arresto naturale, il tempo di arresto specifico è legato all'inerzia del carico del sistema
dell'utente.
Attenzione: Poiché l'arresto del freno ha un cattivo impatto sia elettrico che meccanico, si dovrebbe
usare un arresto naturale se non ci sono particolari esigenze di arresto.
Uscita del segnale di velocità del motore (PG)
L'uscita dell'impulso di velocità è un'uscita a 5V, per ottenere il segnale si deve collegare
all'alimentazione una resistenza di pull-up di 3K ohm ~10K ohm. Il numero di impulsi in uscita per
giro del motore è 3 x N, dove N è il numero di coppie di poli del motore. Per esempio: 2 coppie di
poli, cioè un motore a quattro poli, 6 impulsi per giro. Quando la velocità del motore è di 500
giri/min, l'impulso di uscita del terminale PG è 3000.
Uscita di allarme (ALM)
Uscita di allarme del driver: questo terminale è basso durante un allarme. Per ottenere un segnale,
una resistenza di pull-up da 3K ohm a 10K ohm deve essere collegata all'alimentazione. Quando
l'allarme è attivo, questo terminale è collegato a GND (livello basso) e l'autista si ferma ed è in
allarme.
4DBLS-01S BLDC Driver
Guasto dell'azionamento
Se si verifica un guasto all'interno del driver come la sovratensione o la sovracorrente, il driver entra
in uno stato di protezione, il driver smette automaticamente di funzionare, il motore si ferma e la
luce rossa sul driver è sempre accesa. Il driver può disinserire l'allarme solo se il terminale di
abilitazione viene resettato (cioè EN viene disconnesso da GND) o se l'alimentazione viene
interrotta. Si prega di controllare il cablaggio del motore o di rimuovere il carico se si verifica questo
errore.
Schema di collegamento del motore senza spazzole e del driver
6. Metodo di comunicazione
La modalità di comunicazione è basata sul protocollo standard Modbus, in conformità con lo standard
nazionale GB/T 19582.1-2008, e si basa sulla comunicazione seriale RS485 a due fili, l'interfaccia fisica
utilizza il terminale convenzionale a 3 pin 2.54 (A+, GND, B-), il collegamento seriale è molto
conveniente. Modalità di trasmissione RTU, modalità di convalida CRC, parola iniziale CRC FFFFH,
modalità dati 8-bit seriale asincrona, 1 bit di stop, nessun bit di convalida, baud rate di comunicazione
(9600), altri baud rate possono essere personalizzati.
Supporto dei parametri di funzione 03H multi-registro letto, 06H singola scrittura del registro.
Indirizzo del sito: 00: Indirizzo di trasmissione
1-250: Indirizzo dell'utente
251-255: Indirizzo speciale, non disponibile agli utenti
5DBLS-01S BLDC Driver
No. indirizzo Nome Campo di regolazione Predefinito unità
Primo byte:
Bit0:EN
Primo byte: stato del bit di Bit1: FR
Bit2: BK
controllo Bit3: NW 00H
Bit4: MDX
00 $8000 Bit5: X12
Secondo byte: Angolo di Hall e Bit6: KH
numero di coppie di poli dei Secondo byte: 04H
Bit0-3: numero di coppie di
motori poli 1-15
Bit4-7: angolo del corridoio
0:120
Velocità massima per la
Controllo del tappo
01 $8001 regolazione analogica della 0-65535 6000 RPM
del ponticello
velocità
Primo byte: coppia iniziale 1-255 40H
02 $8002 Secondo byte: velocità di
avviamento senza sensore 1-255 04H
Primo byte: tempo di
0
accelerazione
03 $8003 1-255 0.1s
Secondo byte: tempo di
0
decelerazione
90H 144 corrisponde a
Primo byte: corrente massima 13A
04 $8004
Secondo byte: modello 15 Sensorizzato, 16
0FH senza sensori
Impostazione della velocità di Anello chiuso: 0-65535 2000
05 $8005 RPM
comunicazione Anello aperto: 0-255 81%
06 $8006 Forza frenante 0-1023 1023
Primo byte: indirizzo del sito 1
07 $8007 1-250 0
Secondo byte: riserva
10-17 $8010-$8017 riserva
Valore di ritorno
da esadecimale a
decimale
18 $8018 Velocità effettiva del motore moltiplicato per
20 diviso per il
numero di poli del
motore
Bit0: rotore bloccato
Bit1: sovracorrente
Bit2: valore di Hall
Primo byte: stato di errore anormale
Bit3: tensione bus troppo
bassa
1B $801B Bit4: tensione bus troppo
Secondo byte: stato di
alta
funzionamento del motore
Bit5: allarme picco di
corrente
Bit6: riserva
Bit7: riserva
1C $801C-$801F riserva
20 Illegale sopra $8020
6DBLS-01S BLDC Driver
Gli indirizzi 8000H-8017H sono registri di lettura e scrittura
Gli indirizzi 8018H-801FH sono registri di sola lettura
Altri indirizzi sono illegali
8000: Primo byte:
EN:A NW=0, 0: EN esterno basso valido 1: EN esterno alto valido
A NW=1, 0: EN non valido 1: EN valido
FR: a NW=0, 0: FR esterno basso valido 1: FR esterno alto valido
A NW=1, 0: FR non valido 1: FR valido
BK: a NW=0, 0: BK esterno basso valido 1: BK esterno alto valido
A NW=1, 0: BK non valido 1: BK valido
NW MDX X12 Funzione
0 0 X Velocità analogica esterna
1 X X Controllo della comunicazione interna
KH: 0: modalità ad anello chiuso della velocità 1: modalità ad anello aperto della velocità
avvio 2 coppie di poli 01 06 80 00 09 02 27 9B
velocità di scrittura 1000 01 06 80 05 E8 03 BE 0A
velocità di scrittura 1500 01 06 80 05 DC 05 28 C8
Arresto naturale 01 06 80 00 08 02 26 0B
Arresto di frenata 01 06 80 00 0D 02 25 5B
7. Metodo di cablaggio della comunicazione
Le comunicazioni RS-485 possono essere fatte pilotando un dispositivo di porta di cablaggio convenzionale a 3 pin
2.54.
La piedinatura della porta di cablaggio convenzionale a 3 pin 2.54 è definita come segue:
7Puoi anche leggere