Corso di Biosensori Dott. Andrea Spanu - A.A. 2020-2021
←
→
Trascrizione del contenuto della pagina
Se il tuo browser non visualizza correttamente la pagina, ti preghiamo di leggere il contenuto della pagina quaggiù
Corso di Biosensori A.A. 2020-2021 Dott. Andrea Spanu andrea.spanu@unica.it

Informazioni generali sul corso di Biosensori Lezioni frontali • Introduzione ai concetti generali • Cos’è un sensore? Quali sono i parametri fisici/chimici di interesse in ambito biomedico? • Fondamenti di misure in ambito biomedico • Classificazione dei sensori e delle misure in ambito biomedico • Sensori fisici • Sensori temperatura • Sensori RTD • Termistori • Sensori di temperatura integrati • Sensori meccanici (forza/deformazione) • Strain gauge • Sensori piezoelettrici • Sensori basati su transistor organici
Informazioni generali sul corso di Biosensori Lezioni frontali • Sensori chimici • Sensori potenziometrici (elettrodo a vetro, elettrodi ionoselettivi…) • Sensori amperometrici (elettrodo di Clark e derivati) • Biosensori • Introduzione ai concetti generali • Immunosensori • Sensori enzimatici • Sensori basati su OCMFET • Elettrodi per rilevazione di biopotenziali

Informazioni generali sul corso di Biosensori Attività di laboratorio (max 20 ore) • Introduzione alla strumentazione di laboratorio (generatore di forma d’onda, oscilloscopio e alimentatore) • Caratterizzazione di un sensore di temperatura • Introduzione ai concetti base di concentrazione, molarità, osmolarità… • preparazione di soluzioni a diverso pH • Misure di pH • Sensore amperometrico di glucosio • preparazione di soluzioni a diversa concentrazione di glucosio • misura di concentrazione in campione ignoto • Funzionamento e caratterizzazione di dispositivi a semiconduttore organico • Rilevazione di temperatura con un sistema OCMFET/PVDF-TrFE

Informazioni generali sul corso di Biosensori Altre info • Modalità d’esame: • [In presenza] Prova scritta con domande aperte e a risposta multipla + eventuali esercizi riguardanti le attività del corso • [A distanza] Scritto su Moodle + orale • Orale opzionale • Valutazione delle attività di laboratorio (?) • Materiale didattico • Slide delle lezioni • Obbligo di frequenza • Materiale aggiuntivo: ‘’Sensori per misure biomediche’’, Pàtron Editore
Informazioni generali sul corso di Biosensori Tutor didattico Antonello Mascia antonello.mascia@unica.it

Componenti di uno strumento di misura Un sensore è uno dei componenti fondamentali di qualsiasi sistema/strumento di misura Analisi dei dati • Riconoscimento eventi (frequenza cardiaca, firing rate neuronale,…) • Elaborazione dati (mappe di connettività funzionale, metabolic rate,…) • Classificazione (Principal Component Analysis, pattern recognition,…)
Sensori e trasduttori • Sensore: è l’elemento sensibile che converte la grandezza fisica in ingresso in un grandezza fisica in uscita più facilmente manipolabile • Costituisce un’interfaccia con l’ambiente di misura • Costituisce spesso il limite dello strumento di misura stesso • Trasduttore: componente che ha lo scopo di convertire la variabile da misurare in una forma più facile da elaborare (solitamente un segnale elettrico). In generale un trasduttore converte l’energia che riceve in ingresso in un’altra forma (onda di pressione→segnale elettrico→vibrazione di un piezo) • Elemento critico dal punto di vista tecnologico • Altamente specializzato, costoso, delicato Differenza non sempre così netta (spesso i due termini sono usati come sinonimi)
Sensori e trasduttori

Sensori e trasduttori Trasduttore Sensore
Sensori e trasduttori Energia Radiante Meccanica Termica Sensore/ Segnale trasduttore Elettrico Elettrica Magnetica Chimica
Tipi di segnali SEGNALI RADIANTI Intensità, lunghezza d’onda, polarizzazione, fase Forza, pressione, torsione, flusso, volume densità, massa, posizione, SEGNALI sposta- mento, velocità, accelerazione, ampiezza e lunghezza d’onda MECCANICI acustica SEGNALI TERMICI Temperatura, calore, calore specifico, entropia, flusso di calore SEGNALI ELETTRICI Tensione, corrente, carica resistenza, induttanza, capacità, costante dielettrica, polarizzazione elettrica, frequenza SEGNALI Intensità di campo, momento, magnetizzazione, permeabilità MAGNETICI SEGNALI CHIMICI Composizione, concentrazione, tossicità, potenziale di ossidoriduzione, pH, inquinanti, velocità di reazione.
Sensori e trasduttori: classificazione Principali classificazioni • Trasduttori attivi e passivi • Il principio fisico di trasduzione (resistivo, induttivo, capacitivo, piezoelettrico, elettrochimico, ecc.) Altre classificazioni • La grandezza misurata (es. potenziali elettrici, pressioni, portate, spostamenti, velocità, forze, impedenze, temperature, concentrazioni chimiche); un vantaggio di tale classificazione è quello che i differenti metodi utilizzati per la misura di una certa grandezza possono essere confrontate facilmente • Il sistema fisiologico analizzato (sistema cardiovascolare, polmonare, nervoso, endocrino, ecc.) • la specialità medica (pediatrica, ostetrica, cardiologica, neurologica, radiologica etc): esempio ECG fetale
Trasduttori attivi e passivi • Trasduttori passivi: l’energia è fornita principalmente dal segnale stesso • Termocoppie • Fotodiodi • Celle solari • elementi piezo e/o piro elettrici • … Trasduttore EIN EOUT passivo
Trasduttori attivi e passivi • Trasduttori attivi: l’energia è fornita da una sorgente ausiliaria esterna. Tecnicamente un trasduttore attivo agisce da controllore di energia ed è anche per questo chiamato trasduttore modulante. • Sensore di temperatura RTD (Resistance Temperature Detector) • Estensimetri (Strain Gauges) • Display a cristalli liquidi Sorgente ausiliaria EIN Trasduttore attivo EOUT
Classificazione secondo il principio fisico Trasduttori resistivi: convertono la grandezza da misurare in una variazione di resistenza o resistività secondo la relazione = dove è la resistività, mentre L e A sono rispettivamente la lunghezza e l’area della sezione trasversale del materiale. La variazione di resistenza può essere indotta da: • variazioni di geometria (come nei potenziometri e negli estensimetri) • variazioni di temperatura (come nei termistori). Questo è dovuto al fatto che generalmente la resistività dei materiali utilizzati è temperatura dipendente =
Classificazione secondo il principio fisico Trasduttori capacitivi: partendo dalla formula della capacità di un condensatore a facce piane parallele = dove è la costante dielettrica, A è l’area delle facce mentre d la loro distanza La variazione di resistenza può essere indotta da: • variazioni di posizione relativa dei piatti (sfruttato in alcuni sensori di posizione) • variazioni della costante dielettrica (come in alcuni sensori di livello). Questo è dovuto al fatto che la di un materiale può variare in funzione del liquido nel quale è immerso.
Classificazione secondo il principio fisico Trasduttori induttivi a singolo avvolgimento: partendo dalla formula dell’induttanza = 2 dove è la permeabilità magnetica del nucleo su cui si avvolgono le spire, F è una costante che tiene conto della geometria dell’induttore e n è il numero delle spire La variazione di resistenza può essere indotta da: • variazioni di posizione relativa del nucleo rispetto alle spire (sfruttato in alcuni sensori di posizione)
Classificazione secondo il principio fisico Trasduttori ad effetto Hall: differenza di potenziale generata dall’applicazione di un campo magnetico perpendicolare ad una superficie conduttiva percorsa da corrente.
Classificazione secondo il principio fisico Trasduttori ad effetto Hall: differenza di potenziale generata dall’applicazione di un campo magnetico perpendicolare ad una superficie conduttiva percorsa da corrente = Ԧ sin dove è il campo magnetico, Ԧ è la corrente, K è una costante che dipende dalla geometria del sensore e l’angolo tra i versori del campo magnetico e della corrente. Questo tipo di sensori vengono utilizzati come: • Trasduttori di spostamento lineare o angolare (sfruttato in alcuni sensori di posizione) • Misuratori di corrente
Classificazione secondo il principio fisico Trasduttori termoelettrici: generazione di una differenza di potenziale ai capi di una giunzione costituita da due metalli diversi nel caso in cui il punto di giunzione (giunzione calda) si trovi ad una temperatura diversa rispetto alle estremità libere (giunzione fredda). • = 2 − 1 Questo fenomeno è chiamato effetto Seebeck. Il trasduttore più conosciuto che sfrutta questo fenomeno fisico è la termocoppia.
Classificazione secondo il principio fisico Sensori piezo e piroelettrici: si basano sul principio fisico per cui alcuni materiali cristallini (es.: quarzo) o polimeri con elevato momento di dipolo (es.: PVDF) producono una differenza di potenziale elettrico quando sono sottoposti ad una certa pressione o ad una certa variazione di temperatura. Sensori di tipo fotovoltaico: sfruttano il fenomeno fisico per cui i portatori di carica presenti nella banda di valenza di un semiconduttore quale il Silicio possono essere ‘’sbalzati’’ in banda di conduzione in seguito all’assorbimento di energia da parte di fotoni incidenti. Questo fenomeno genera delle coppie elettrone-lacuna libere che, se opportunamente indirizzate, possono generare una corrente elettrica misurabile.
Caratteristiche principali dei trasduttori - Esterne • Dimensioni ridotte (e comunque dipendenti dall’applicazione) • Facilità di posizionamento • Resistenza e durata (riutilizzabilità) • Basso costo (usa e getta) • Basso impatto ambientale (materiali riciclabili, bioriassorbibili, edibili…) • Minima invasività e massima biocompatibilità
Definizione biocompatibilità – un ripasso “[The biocompatibility is defined as] the “[La biocompatibilità è definita come] la ability of a material to perform with an capacità di un materiale di svolgere un appropriate host response in a specific compito in una specifica applicazione, application” (Williams, 2008). determinando un’opportuna risposta nell’organismo ospite” (Williams, 2008). In generale, si definiscono materiali biocompatibili quei materiali che abbiano proprietà meccaniche, chimiche ed elettriche tali da non arrecare danni ai sistemi biologici e da non essere a loro volta danneggiati dopo la loro inserzione all’interno di un organismo biologico o comunque dopo il loro posizionamento a contatto di tessuti biologici.
Definizione biocompatibilità – un ripasso • Stabilità chimica, in quanto variazioni delle sue proprietà chimiche potrebbero alterarne la funzionalità • Assenza di fenomeni cancerogeni • Assenza di fenomeni tossici • Assenza di fenomeni di rigetto • Assenza di cause che portano alla coagulazione del sangue • Presenza di opportune proprietà di resistenza meccanica • Densità non eccessiva per mantenere in limiti tollerabili il peso delle apparecchiature • Proprietà anti-corrosive, sia per non avere un deterioramento del materiale, sia per non porre in circolazione prodotti di corrosione che possono risultare nocivi • Possibilità di sterilizzazione senza degrado
Caratteristiche principali dei trasduttori - Interne • Velocità di risposta opportuna • Stabilità della reazione nella finestra temporale di misura (nel caso di biosensori o sensori chimici in generale) • Linearità • Sistema di calibrazione • Assenza di isteresi • Assenza di interazioni aspecifiche
Caratteristiche generali apparecchiature di sensing • Opportuno condizionamento del segnale (filtraggio, averaging, amplificazione…) • Opportuna banda passante • Elevato rapporto segnale rumore (SNR – Signal to Noise Ratio) • Minimizzazione di attenuazioni e distorsioni qualora ci fosse la necessità di accoppiamento tra vari stadi • Visualizzazione (o salvataggio e formattazione) ottimale dei dati • Schermatura contro le interferenze esterne
Principali fonti di rumore Per artefatti fisiologici si intendono tutti quei segali non utili nella misura che io sto effettuando che sono generati dall’organismo vivente. Ad esempio, se voglio effettuare la misurazione di un segnale elettroencefalografico quello che succede è che l’elettrodo non acquisisce solo il potenziale elettrico celebrale di interesse generato in quella zona in cui è posizionato l’elettrodo, ma può succedere che a a questo segnale utile si può sommare un artefatto derivante dall’attività elettrica dei muscoli orbitali. Gli artefatti fisiologici possono quindi essere definiti come segnali che il nostro corpo inevitabilmente genera e che possono accoppiarsi al segnale che invece vogliamo misurare (altro es.: segnale elettrocardiografico durante misure elettromiografiche).
Principali fonti di rumore Artefatti non fisiologici: includono tutti quei disturbi che provengono dall’esterno e possono essere generati: - da problemi che si hanno durante la misura; per esempio nel caso dell’EEG se l’elettrodo non è ben adeso allo scalpo questo genera degli artefatti da movimento a bassa frequenza i quali alterano la qualità del segnale, - possono provenire dalla stessa strumentazione elettronica che di fatto non è una strumentazione ideale ma può generare rumore che si somma al segnale utile. Questo aspetto è particolarmente critico nelle misure biomediche in quanto il rumore della strumentazione elettronica ha un’ampiezza spesso comparabile a quella dei segnali che stiamo studiando (ordine dei µV) - interferenze elettromagnetiche provenienti da altri dispositivi che suono nel luogo in cui si effettua la misura o il rumore di linea (50 Hz).
Principali fonti di rumore
Principali fonti di rumore Artefatto da movimento
Principali fonti di rumore Wandering della baseline
Principali fonti di rumore Sovrapposizione di segnale elettro miografico
Principali fonti di rumore Interferenza di rete
Criteri per la scelta di un sensore • Campo di misura (es.: 200-400 °C) o span di misura (es.: 200 °C) • Accuratezza, precisione e risoluzione desiderate • Costi (legati al punto precedente) • Caratteristiche dinamiche • Livello di affidabilità (es.: indice chiamato MTBF – Mean Time Between Failures) • Materiali (aspetto cruciale in ambito biomedico) • Invasività • …
Criteri per la scelta di un sensore ESEMPIO: Sensore di temperatura • il campo di misura e la risoluzione complessiva sulla misura si influenzano mutuamente nel caso di conversione digitale del segnale fornito dal sensore Qual è il migliore?
Criteri per la scelta di un sensore ESEMPIO: Sensore di temperatura • il campo di misura e la risoluzione complessiva sulla misura si influenzano mutuamente nel caso di conversione digitale del segnale fornito dal sensore Dipende. Non è sempre consigliabile scegliere il sensore con il massimo campo di misura in quanto ciò potrebbe comportare una degradazione della risoluzione e, di conseguenza, un aumento del rumore di quantizzazione. D’altra parte, in alcune applicazioni una risoluzione elevata non è essenziale. Questo aspetto deve essere attentamente valutato in fase di progettazione.
Misure in ambito biomedico Definizione dal libro di testo ‘’Sensori per misure biomediche’’, Pàtron Editore Lo scopo ultimo della misura in ambito medico è quello di descrivere la “storia naturale” della malattia in modo che gli indicatori di ciascuno stadio di essa per ogni individuo possano avere carattere predittivo e possibilmente conducano ad azioni di prevenzione. Le misure sugli esseri viventi comportano spesso una varietà d’interazioni che possono essere di tipo biochimico, fisiologico o addirittura psicologico e che diventano talvolta difficilmente valutabili attraverso un processo di riduzione ed analisi. Nella definizione delle specifiche dei sistemi di misura ci si riferisce a distribuzioni statistiche e a funzioni di probabilità anziché a valori strettamente deterministici.
Principali tipi di misura in campo biomedico Variabile misurata o tecnica di misura Range di misura Frequenza del segnale misurato [Hz] Pressione arteriosa 10-300 mmHg 0-50 Pressione venosa 0-50 mmHg 0-50 Pressione gastrointestinale 0-80 mmHg 0-10 Pressione vescicale 1-100 mmHg 0-10 Pressione intracranica 10-60 mmHg 0-40 Portata volumetrica di sangue 1-300 10-6 m3/s 0-20 Frequenza respiratoria 2-50 respiri/min - Temperatura corporea 32-42 °C 0-0.1
Principali tipi di misura in campo biomedico Frequenza del segnale misurato Variabile misurata Range di misura [Hz] Potenziali nervosi 0.01-3 mV 0-104 Elettrocardiografia (ECG) 0.5-4 mV 0.01-250 Elettroencefalografia (EEG) 5-300 µV 0-150 Elettrogastrografia (EGG) 0.01-1 mV 0-1 Elettromiografia (EMG) 0.1-5 mV 0-104 Elettrooculografia (EOG) 0.05-3.5 mV 0-50 Risposta galvanica cutanea 1-500 Kohm 0.01-1 Magnetocardiografia (MCG-SQUID) -1000 pT 0-50
Principali tipi di misura in campo biomedico Frequenza del segnale misurato Variabile misurata Range di misura [Hz] pH del sangue 6.8-7.8 0-2 pH gastrico 3-13 0-1 Gas disciolti nel sangue: pO2 30-100 mmHg 0-2 pCO2 40-100 mmHg 0-2 pN2 1-3 mmHg 0-2 pCO 0.1-0.4 mmHg 0-2
Principali tipi di misura in campo biomedico Frequenza del segnale misurato Variabile misurata Range di misura [Hz] Urea: Biosensore a ureasi 10-4-10-2 M 0-1 Glucosio: Biosensore a glucoso-ossidasi 10-3-10-1 M 0-1 Principali ioni nel plasma: Na+ 0.05-0.3 M 0-2 K+ 0.001-0.01 M 0-2 Mg++ 0.0002-0.002 M 0-2 Ca++ 0.05-0.2 M 0-2
Classificazione misure biomediche • Non invasive: quando preleva il segnale dal paziente senza causargli traumi, lesioni o significative alterazioni dei suoi parametri vitali. • ECG • EMG • EEG • suoni cardiaci o polmonari • pressione arteriosa • pressione intracranica • temperatura • pO2 (spirometria) • volumi polmonari (spirometria) • …
Classificazione misure biomediche • Invasive o minimamente invasive: … • misura del glucosio • gittata cardiaca (termodiluizione) • pressione oculare • sonde endovascolari • sonde intra esofagea • …
Classificazione misure biomediche • Dirette: rilevano le quantità fisiche e chimiche d’interesse semplicemente confrontandole con valori di riferimento. Un esempio di misura diretta è quello della resistenza della pelle che confronta direttamente la resistenza rilevata con una standard. Le misure realmente dirette sono molto poche… • Indirette o inferenziali: si basano su relazioni matematico-statistiche che intercorrono tra variabili che non possono invece essere misurate direttamente. Naturalmente le relazioni suddette vengono determinate sia sulla base di analisi teoriche, sia con tecniche empiriche che coinvolgono altre misure, spesso meno significative.
Esempio: Misura della gittata cardiaca La gittata (o portata) sanguigna è un parametro di fondamentale interesse biomedico (tipicamente viene rilevata durante la terapia intensiva): Bassa portata media --> bassa pressione, bassa ossigenazione tessuti (possibili necrosi), shock, insufficienza renale.... Valori tipici (medi) di portata cardiaca: 4-8 L/min Volume cuore: 70-100 ml Frequenza cardiaca media a riposo: 60-90 bpm Stroke Volume normale = 60-100 ml
Esempio: Misura della gittata cardiaca Metodo di Fick: indiretto e invasivo. Introdotto nel 1870 da Fick, si basa sul principio per cui la quantità di una sostanza sottratta al sangue da un organo (o consumata in generale) nell’unità di tempo, è data dalla differenza artero-venosa (A-V) di concentrazione della sostanza, moltiplicata per il flusso (legge di conservazione di massa). Con questo principio si può dunque determinare la gittata cardiaca misurando la quantità di O2 consumata dall’organismo in un dato periodo di tempo e dividendo questo valore per la differenza A-V.
Esempio: Misura della gittata cardiaca Dato che il sangue arterioso ha la stessa composizione in ogni parte del corpo, si può misurare il suo contenuto in O2 su campioni prelevati da qualunque arteria. Il sangue venoso deve invece essere prelevato dall’arteria polmonare mediante cateterismo. Il consumo globale di ossigeno viene invece misurato tramite uno spirometro.
Esempio: Misura della gittata cardiaca Il calcolo della gittata cardiaca (di fatto quella del ventricolo sinistro) viene dunque effettuata utilizzando la seguente formula: 2 = 2 − 2 dove 2 è la quantità di ossigeno consumata nell’unità di tempo a livello polmonare (ml/min) mentre 2 e 2 sono i rapporti delle quantità di O2 per litro di sangue arterioso e venoso rispettivamente (ml/ml).
Esempio: Misura della gittata cardiaca • Conoscenza della velocità istantanea del flusso in un punto del vaso e integrazione sulla sezione: • Flussimetri elettromagnetici o velocimetri ∙ = ∙ = Un conduttore, che si muove attraverso un campo magnetico (CM), genera un campo elettrico perpendicolare alla direzione del movimento e alle linee di forza del CM stesso. Vaso sanguigno posto tra due poli di un magnete più due elettrodi collocati ai due lati del vaso, perpendicolarmente alle linee di forza del magnete. Quando il sangue (conduttore perché contiene elettroliti) scorre attraverso il CM, tra i due elettrodi si genera un voltaggio proporzionale all’entità del flusso.
Misura della gittata cardiaca • Un altro esempio di metodo indiretto (‘’minimamente’’ invasivo) è quello della misura della portata sanguigna in uscita dal cuore attraverso l’aorta (gittata cardiaca), che utilizza il principio di diluizione del tracciante. Mediante l’uso di cateteri, s’inietta un indicatore (solitamente una soluzione di destrosio a 4 °C) e si misura la variazione nel tempo della concentrazione dell’indicatore nel sistema cardiovascolare: relazione tra gittata e concentrazione dell’indicatore. • Andando a misurare la temperatura della mistura sangue/fluido si risale all’entità della diluizione del fluido che è legata alla portata sanguigna • La temperatura è misurata tramite un termistore • Ipotesi: il fluido immesso non varia la portata in modo significativo e che tra monte (dove inietto il fluido) e valle (dove misuro la temperatura) non ci sia perdita di calore
Esempio: Misura della gittata cardiaca • Catetere inserito da vena cava in atrio DX, ventricolo DX, arteria polmonare • iniezione del destrosio in atrio DX due termistori uno in vena cava (Ts, non risente dell’iniezione del bolo) e l’altro in arteria polmonare (misura Tm) • Si tenta di iniettare il bolo in fase di diastole (il cuore si riempie prima della sistole) per sfruttare la fase sistolica (contrazione) • sistema di sincronizzazione tramite rilevazione ECG Problemi • scambi di calore con l’esterno tramite il catetere fluttuazioni della temperatura del sangue (compensati con l’utilizzo dei due termistori) • disomogeneità nell’iniezione del destrosio
Esempio: Misura della gittata cardiaca TS= T del sangue prima dell’iniezione del bolo TI= T del bolo iniettato TM VI: volume iniettato CO: Cardiac output (portata cardiaca); t1 = istante di iniezione del bolo TS t2 = istante in cui la T del sangue torna uguale a quella prima dell’iniezione ∆TM CONSIDERAZIONI: • Maggiore è ∆t minore è la portata cardiaca (maggiore la portata, maggiore la diluizione, maggiore la velocità con cui la temperatura della mistura tenderà a quella sanguigna) t • Tipicamente ∆TM molto piccole t1 t2 • Il sistema in esame è un sistema aperto: la ∆t circolazione polmonare funge da ‘’radiatore’’
Esempio: Misura della gittata cardiaca TS= T del sangue prima dell’iniezione del bolo TI= T del bolo iniettato VI: volume iniettato CO: Cardiac output (gittata cardiaca); t1 = istante di iniezione del bolo t2 = istante in cui la T del sangue torna uguale a quella prima dell’iniezione CONSIDERAZIONI: • Maggiore è ∆t minore è la gittata cardiaca (maggiore la gittata, maggiore la diluizione, − 1 2 = maggiore la velocità con cui la temperatura della ∆ mistura tenderà a quella sanguigna) • Tipicamente ∆TM molto piccole K1 e K2 sono costanti che dipendono dalla densità • Il sistema in esame è un sistema aperto: la e dal calore specifico di circolazione polmonare funge da ‘’radiatore’’ sangue e tracciante
Esempio: Misura della gittata cardiaca Portata cardiaca metodo indiretto non invasivo: pletismografia ad impedenza elettrica. Si basa sul fatto che l’impedenza toracica varia col flusso sanguigno: • durante la fase di diastole, il ventricolo sinistro pompa un certo volume dV, detto stroke volume, nel sistema circolatorio provocando una diminuzione della resistenza (impedenza) dR • Misura a 4 elettrodi • si inietta corrente a 100 Khz (effetto si limita al riscaldamento per effetto Joule, no interferenza con il ciclo di stimolazione cardiaca)
Esempio: Misura della gittata cardiaca Sistema a 4 elettrodi (riduzione dell’artefatto dovuto all’impedenza degli elettrodi) si usano 4 bande ma possono essere sostituiti con elettrodi standard da ECG Vengono iniettate correnti a bassa intensità (2 elettrodi) Viene rilevata la tensione tra altri due 2 elettrodi
Esempio: Misura della gittata cardiaca Modello semplificato del torace A ∆ L ∆ = ∆ 0 = ⇒ = 0 2 2 Approccio non più utilizzato (equazione = ∙ ⟹ = ⟹ d = − 02 dZ di Kubicheck - 1966) in quanto poco 0 accurato
Esempio: Misura della gittata cardiaca Misura tramite flussimetri magnetici: Metodo di Fick: indiretto e invasivo indiretto e invasivo Metodo della diluizione del Pletismografia ad impedenza: tracciante: indiretto e invasivo indiretto e non invasivo Qual è il migliore?
Esempio: Misura della gittata cardiaca Misura tramite flussimetri magnetici: Metodo di Fick: indiretto e invasivo indiretto e invasivo Metodo della diluizione del Pletismografia ad impedenza: tracciante: indiretto e invasivo indiretto e non invasivo DIPENDE!
I segnali biomedici Un modo comunemente utilizzato per classificare i segnali biomedici è la distinzione a seconda dei fenomeni che li generano. In particolare: Bioelettrici Biomagnetici Bioacustici Biochimici Biomeccanici
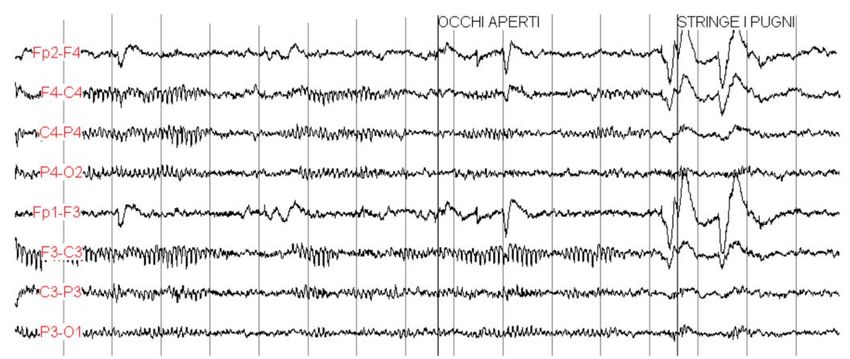
I segnali biomedici • I segnali bioelettrici sono molto importanti in campo medico; essi sono generati dalle cellule nervose e muscolari, il cui potenziale di membrana sotto certe condizioni può venire eccitato generando un potenziale d’azione. Il relativo campo elettrico associato si propaga attraverso i tessuti biologici e il potenziale può essere registrato in punti definiti della superficie esterna eliminando la necessità di ricorrere a mezzi invasivi. Esempio di un tracciato EEG ONDA f [Hz] A [µV] Delta 1-4 fino a 200 Theta 5-7 fino a 100 Alfa 8-14 20-50 Beta 15-30 5-20 Gamma > 30 < 10
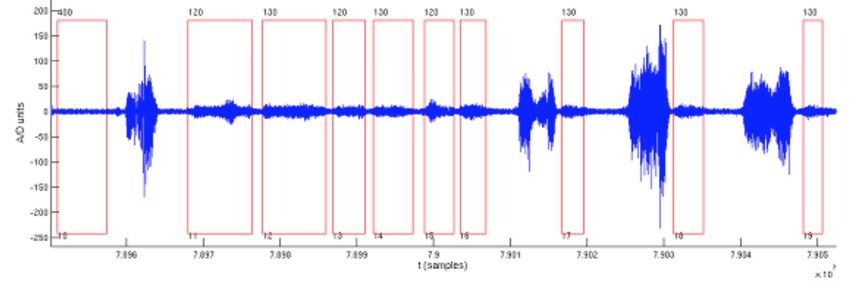
I segnali biomedici • Molti eventi d’interesse biomedico sono accompagnati da “rumori” che possono essere rilevati: pensiamo al fluire del sangue nelle arterie e attraverso le valvole cardiache. L’energia acustica associata si propaga attraverso i tessuti e questi segnali bioacustici (rumori di Korotkov o Korotkoff) possono così essere facilmente acquisiti con opportuni trasduttori sulla superficie del corpo (microfoni o accelerometri). Un altro esempio di segnale bioacustico è l’attività russatoria. Essa è generata in corrispondenza delle vie aeree superiori, non per vibrazione delle corde vocali (come accade per la voce), ma delle strutture faringee. Sono segnali periodici a bassa frequenza. Permettono la diagnosi delle apnee notturne.
I segnali biomedici • Alcuni organi come il cuore, i polmoni, il cervello producono campi magnetici di debole intensità. La misura di questi campi magnetici (segnali biomagnetici) fornisce delle informazioni non contenute negli altri segnali bioelettrici. Un esempio può essere la magnetoencefalografia. Università di Nottingham
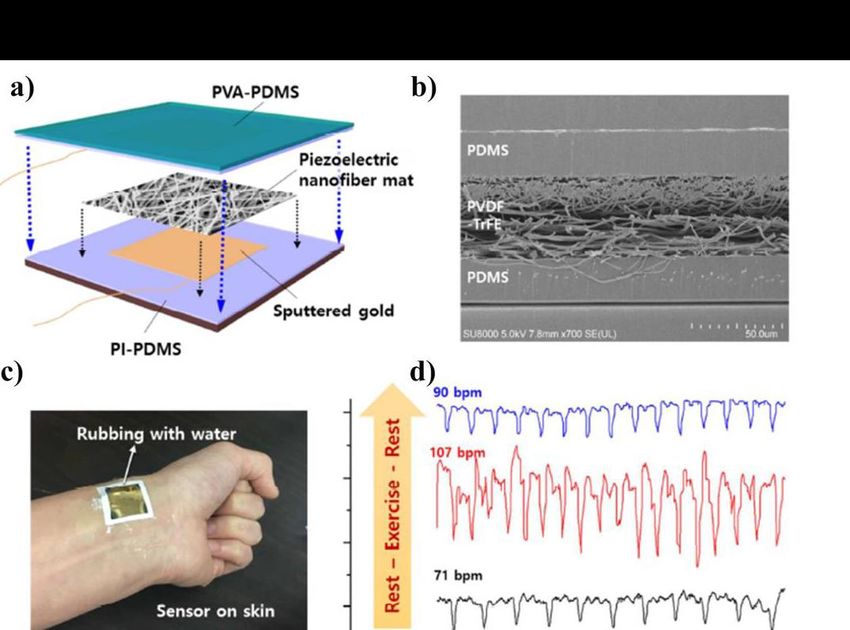
I segnali biomedici • I segnali biomeccanici includono tutti i segnali originati da una qualunque funzione meccanica svolta dal sistema biologico in osservazione. Gli effetti meccanici non si propagano come quelli elettrici e la loro misura è per questo generalmente localizzata e spesso invasiva. Esempi di segnali biomeccanici includono: segnali di movimento e spostamento, pressione, flussi, etc…la misura di questi segnali richiede generalmente una grande varietà di trasduttori che devono essere posizionati nel sito di origine del segnale. Park, S.-H. et al., 2016.
I segnali biomedici Mappa delle vie metaboliche del corpo umano… I segnali biochimici sono prodotti dalle misure su tessuti o composti esaminati in laboratorio (ad esempio le concentrazioni di ioni in prossimità di una cellula, biomarker tumorali, piccole molecole, gas…).
Acquisizione di segnali biomedici Segnale analogico Segnale digitale
Acquisizione di segnali biomedici – strumentazione analogica Diverse sono le modalità di visualizzazione dei segnali rilevati: I registratori su carta. Sono generalmente del tipo a galvanometro: il segnale d’ingresso fa deviare di un angolo a esso proporzionale il braccio mobile alla cui estremità è posta la penna scrivente. I tipi più diffusi sono quelli a scrittura diretta per mezzo d’inchiostro o a stilo caldo oppure i registratori fotografico o a radiazione ultravioletta. Esempio di elettrocardiografo da riposo analogico multicanale
Galvanometro Trasduce una corrente elettrica in un momento magnetico Costituito da una bobina immersa in un campo magnetico e da un indicatore a lancetta fissato ad una molla Se nelle spire della bobina circola corrente, il momento meccanico dovuto al campo magnetico provoca una rotazione della bobina stessa. Grazie al momento di reazione, dovuto presenza di una molla, la bobina è richiamata verso l’equilibrio dalla coppia di richiamo (molla a spirale) e l’angolo di rotazione della bobina è proporzionale alla corrente i che vi circola.
Acquisizione di segnali biomedici – strumentazione digitale Segnale analogico Sensore/Trasduttore Amplificatore Filtro Analogico Campionatore Elaborazione Digitale Quantizzatore Esempio di elettrocardiografo digitale
Caratteristiche di un sistema di misura Le caratteristiche statiche descrivono il comportamento dello strumento di misura rispetto ad un ingresso stazionario, cioè costante nel tempo, o rispetto ad un ingresso che varia molto lentamente rispetto alle costanti di tempo di ingresso dello strumento (es.: temperatura, peso, pressione…) Le caratteristiche dinamiche descrivono la risposta di un strumento di misura rispetto ad un ingresso variabile nel tempo, per esempio in strumenti destinati a misurare segnali (es.: segnali EEG, EMG, ECG, accelerometri…)
Prestazioni statiche generali La caratteristica statica: di uno strumento definisce la relazione tra l’ampiezza della grandezza in ingresso e l’ampiezza della grandezza in uscita. Questa caratteristica è il più delle volte approssimabile con una retta: = ∙ + • Sensibilità statica è la pendenza locale della caratteristica statica (nel caso la caratteristica sia una retta essa coincide con il coefficiente a). • Risoluzione è la più piccola variazione dell’ingresso per la quale si hanno variazioni apprezzabili dell’uscita. • Precisione è data dalla deviazione standard del coefficiente a avendo a disposizione una serie di misure. • Isteresi è provocata da fenomeni di frizione tra gli elementi di uno strumento di misura con il risultato che l’uscita assume valori diversi a seconda che un certo valore d’ingresso venga raggiunto per valori crescenti o decrescenti.
Prestazioni statiche generali Accuratezza. L’accuratezza di una misura, differenza tra il valore osservato e il valore vero, è una misura dell’ errore totale, dovuto sia all’errore sistematico (che assume lo stesso valore in prove ripetute ed è eliminabile con la calibrazione) sia all’errore accidentale o casuale, dovuto a una pluralità di fattori il cui effetto è impossibile (o non pratico) eliminare. Con l’accuratezza si fornisce l’intervallo entro cui è compreso il valore vero. Tale intervallo è espresso in percentuale del valore letto o (più spesso) del fondo scala dello strumento. L’accuratezza di uno strumento può essere calcolata in base ai dati di calibrazione. Secondo un approccio deterministico si assume come la massima differenza (in valore assoluto) tra l’ingresso misurato e quello predetto dalla curva di taratura (impropriamente chiamata in italiano curva di calibrazione) media, y=(z-b)/a.
Prestazioni statiche generali-Accuratezza e precisione 1 Nel primo caso (giocatore 1) le freccette sono attorno al centro. Nel secondo caso (giocatore 2) invece vediamo che nell’insieme dei nostri lanci le freccette hanno colpito il bersaglio ‘’mediamente’’ più lontano dal centro. Possiamo dire che l’insieme di lanci del primo caso è più accurato del secondo. 2 giocatore 1 più accurato del giocatore 2
Prestazioni statiche generali-Accuratezza e precisione Nel caso del giocatore 3, le freccette cadono 3 “mediamente” attorno al centro vero ma questa volta però i lanci colpiscono il bersaglio con una maggiore dispersione. Anche nel caso del giocatore 4, come in quello del giocatore 2, le freccette hanno colpito il bersaglio “mediamente” lontano dal centro vero, ma qui 4 con maggiore dispersione. giocatore 3 più accurato del giocatore 4
Prestazioni statiche generali-Accuratezza e precisione In generale: il giocatore 1 è più accurato del giocatore 1 2 2, mentre il giocatore 3 è più accurato del 4. In più potrei dire che, considerando la distanza “media” dei lanci di ciascun giocatore dal centro vero, il giocatore 1 è accurato quanto il giocatore 3, ed il giocatore 2 quanto 4. Prendiamo ora in considerazione, per ogni giocatore, la “dispersione” dei lanci rispetto alla loro “media”. Con riferimento alle figure, qualitativamente si può dire che 3 4 la dispersione è piccola nei casi 1 e 2, ed è più grande nei casi 3 e 4. Questa dispersione è strettamente legata al concetto di Precisione, tanto più piccola è la dispersione tanto maggiore sarà la precisione. Si può quindi affermare che i giocatori 1 e 2 sono più precisi dei giocatori 3 e 4.
Prestazioni statiche generali-Accuratezza e precisione 1 più accurato di 2 1 2 3 più accurato di 4 3 più accurato di 2 1 e 2 più precisi di 3 e 4 Nella definizione di Precisione non viene considerato il fatto che i lanci siano più o meno 3 4 vicini al centro vero. Numero 2: esempio di errore sistematico spesso difficilmente individuabile…
Prestazioni statiche generali-Accuratezza e precisione Accuratezza: indica quanto uno strumento è capace di avere uscite il più possibile vicine al valore reale della grandezza di input. Il concetto di precisione è invece legato al grado di riproducibilità di una misura. In altre parole, se esattamente lo stesso valore viene misurato una certa quantità di volte, un sensore ideale avrà in uscita sempre lo stesso identico valore. I sensori reali daranno invece in uscita un range di valori distribuiti in una qualche maniera rispetto al valore corretto. Supponiamo per esempio che una pressione di esattamente 100 kPa sia applicata ad un sensore. Anche se l’input non cambia mai, gli output del sensore potrebbero variare considerevolmente.
Prestazioni statiche generali Il campo di misura: è il massimo intervallo di valori entro cui lo strumento è in grado di misurare la grandezza d’ingresso rispettando le specifiche dichiarate dal costruttore. Per uno strumento lineare, è di uso comune il termine campo di funzionamento lineare. Campo di normale funzionamento: è l’intervallo di valori entro il quale si trova l’uscita quando la grandezza d’ingresso è nel campo di misura Esempio Il sensore di temperatura commerciale LM35 ha un campo di misura tra -55 °C e 150 °C e un campo di funzionamento tra -550 mV e 1500 mV
Prestazioni statiche generali - Linearità Nella pratica, nessuno strumento ha una risposta perfettamente lineare, per cui è necessaria una misura dello scostamento dalla linearità. Come indice di tale scostamento, generalmente, si assume la massima deviazione di un qualunque punto di calibrazione dalla retta dei minimi quadrati, espressa come percentuale del valore letto, del fondo scala o di una loro combinazione. y z
Curva di taratura Le prestazioni statiche sono ottenute da un processo, detto taratura mediante il quale si determina la relazione (curva di calibrazione) tra l’uscita e l’ingresso desiderato dello strumento. Durante la taratura si cercano di mantenere costanti tutti gli altri ingressi (indesiderati, modificanti), mentre l’ingresso in esame è fatto variare internamente a un prefissato campo di valori e si osservano i conseguenti valori dell’uscita, una volta raggiunto l’equilibrio. Quando si tara uno strumento, l’ingresso deve essere misurato con uno strumento dotato di una precisione superiore a quella dello strumento da tarare (di norma 10 volte più preciso).
Curva di taratura È necessario evitare di confondere la taratura con la calibrazione: la taratura è un'operazione che permette di definire le caratteristiche metrologiche di uno strumento, la calibrazione ha come obiettivo rendere lo strumento più accurato. Taratura ≠ Calibrazione Calibration Adjustment
Curva di taratura I parametri della retta di taratura possono essere determinati a partire dai dati sperimentali utilizzando, ad esempio, il metodo dei minimi quadrati. Questo metodo porta a minimizzare la somma dei quadrati delle differenze tra i dati indicati dallo strumento e quelli previsti dalla retta e può essere utilizzato per approssimare anche curve diverse dalla retta. n = numero di misurazioni (n coppie (y, z)); Una volta determinati i parametri a e b, la migliore stima del valore vero (y0) in corrispondenza della lettura z0 è data dalla seguente relazione:
Errori sulla caratteristica statica Errore di offset: è il valore che assume l’uscita del trasduttore quando la grandezza da misurare è nulla. ∆ Errore di linearità: % = 100 − ∆ : massimo scostamento dalla caratteristica lineare Caratteristica reale (misurata) Retta che meglio approssima la caratteristica reale (misurata)
Prestazioni statiche generali – Sensibilità statica La sensibilità statica. La sensibilità statica di uno strumento è la pendenza della curva di calibrazione in corrispondenza di uno specificato valore di ingresso. Se questa curva è un segmento di retta, la sensibilità non dipende dal valore della grandezza d’ingresso e coincide con il coefficiente angolare dell’equazione della retta. Ovviamente, perché la definizione sia significativa, la grandezza di uscita deve essere la grandezza fisica effettivamente osservata e non il significato dato ai numeri sulla scala. Ad esempio, in un manometro a indice la quantità in uscita letta sulla scala graduata è indicata in kPa, ma la grandezza fisica è in realtà la rotazione angolare dell’indice. Pertanto, la sensibilità statica del manometro è data in gradi/kPa.
Prestazioni statiche generali – Sensibilità statica La sensibilità di un sensore si può definire come la variazione del valore misurato (corrente, gradi angolari, tensione di soglia, resistenza, mobilità…) in funzione della variazione della quantità misurata (pressione, temperatura, concentrazione di un certo analita…): ℎ, , , … = Dove M è la quantità misurata
Sensibilità statica e limit of detection (LOD) Limit of detection (LOD) è la più piccola concentrazione di analita rilevabile da uno strumento. Idealmente dovrebbe essere limitata dalla sola risoluzione dello strumento stesso ed è definita come l’output per cui sussiste la seguente relazione: − ≥ 3 dove è il segnale in uscita dallo strumento in assenza dell’analita. Il LOD è limitato dal rumore intrinseco del sensore, dall’elettronica e dalle interferenze ambientali. : valore del segnale prima dell’introduzione dell’analita (blank) : valore del segnale dopo − l’introduzione dell’analita
Sensibilità statica e limit of detection (LOD) Metodo per ottenere la sensibilità: y = mx + q Estrapolazione dalla retta di taratura y = valore misurato [Ampére] x = quantità misurata Non è il LOD! [Concentrazione] m = sensibilità [Ampére/concentrazione]
Sensibilità statica e limit of detection (LOD) Possibile definizione del LOD: mimina concentrazione di analita che determina una variazione dell’uscita pari a 3*BLANK (dove BLANK è il segnale misurato in un campione dove l’analita è assente). Dunque: LOD=(3*BLANK)/S S = sensibilità ERGO: puoi avere un sensore sensibilissimo ma un alto LOD dovuto al livello di rumore della misura. Fonti di rumore principali (e distribuzioni spettrali [V2/Hz]): • Termico: S(f) = 4kRT • Shot: S(f) = 2aI0 • G-R: S(f) = 0 / 1 + 2 2 • Flickr: S(f) = ∗ / [ ≈ 2; ≈ 1]
Sensibilità statica e limit of detection (LOD) Possibile definizione del LOD: mimina concentrazione di analita che determina una variazione dell’uscita pari a 3*BLANK (dove BLANK è il segnale misurato in un campione dove l’analita è assente). Dunque: LOD=(3*BLANK)/S S = sensibilità ERGO: puoi avere un sensore sensibilissimo ma un basso LOD dovuto al livello di rumore della misura. Altre fonti di rumore: • Drift del sensore nel tempo • Rumore di quantizzazione • Variazioni di pH o temperatura • Legami non specifici (cross-sensitivity)
Sensibilità statica e limit of detection (LOD) Limit of detection (LOD), altra definizione: specifica quantità rilevata per la quale la probabilità di avere un falso negativo (per esempio escludere erroneamente la presenza di una certa sostanza) e la probabilità di avere un falso positivo (indicare cioè la presenza di una sostanza che in realtà non è presente in soluzione) sono inferiori ad un certo valore. Questo valore è suggerito dallo IUPAC in 0.05, il quale corrisponde ad una distanze tra i picchi delle due gaussiane (nel nostro caso il rumore e la risposta S-SB) pari a circa 3 deviazioni standard (del rumore). Questa definizione è ampiamente variabile e dipende dallo specifico campo applicativo. − ≥ 3 IUPAC: International Union of Pure and Applied Chemistry
Prestazioni statiche generali La deriva di zero e di sensibilità. In uno strumento lineare, gli ingressi modificanti/indesiderati possono alterare la curva di calibrazione media, variando sia il valore del coefficiente b (si parla allora di deriva di zero) sia il valore del coefficiente a (si parla allora di deriva di sensibilità). La risoluzione. Essa è espressa dalla più piccola variazione dell’ingresso in grado di determinare variazioni apprezzabili dell’uscita. In alternativa definisce soglia di sensibilità la più piccola variazione dell’ingresso in corrispondenza della quale l’uscita è apprezzabilmente diversa dallo zero. Spesso la risoluzione è data in percentuale del fondo scala. Fondo scala: in genere si indica come fondo scala il valore massimo dell’uscita di uno strumento.
Prestazioni statiche generali L’isteresi: origina dai fenomeni di dissipazione energetica (per esempio attrito interno o isteresi magnetica ) ed è apprezzabile in presenza di segnali anche lentamente variabili. Essa determina valori diversi dell’uscita a seconda che l’ingresso sia raggiunto per valori crescenti o decrescenti. L’isteresi può essere specificata in termini d’ingresso o di uscita ed è data, generalmente, come percentuale del fondo scala.
Caratteristiche dinamiche Nel dominio della frequenza: • Risposta in frequenza: curve del modulo e della fase rispetto alla frequenza (Diagrammi di Bode). • Campo di frequenza: intervallo di frequenze nel quale la curva di risposta in modulo non esce da una fascia di tolleranza prefissata. • Eventuale frequenza di risonanza. Nel dominio del tempo: • Tempo morto • Tempo di salita • Tempo di risposta • Costante di tempo • Tempo di assestamento • Sovraelongazione • Frequenza delle oscillazioni di assestamento • Fattore di smorzamento
Caratteristiche dinamiche Limite di velocità: massima velocità di variazione del misurando oltre la quale l’uscita non varia corrispondentemente. Tempo di recupero (recovery time): intervallo di tempo richiesto dopo un evento specificato (ad es. un sovraccarico) affinché il sensore riprenda a funzionare secondo le caratteristiche specificate.
Tempo di risposta La risposta dei sensori non cambia immediatamente in seguito al cambiamento dell’ingresso. Quello che succede è che impiegano un certo tempo, chiamato appunto tempo di risposta (Tr), per raggiungere un nuovo stato di equilibrio. Il tempo di risposta di un sensore è l’intervallo di tempo che intercorre tra la variazione del parametro da misurare e l’istante in cui il segnale registrato dal sensore varia (all’interno di una certa banda di tolleranza) come conseguenza della variazione del parametro stesso. Il tempo di risposta può essere determinato in maniera diversa dipendentemente dal sensore che si considera.
Tempo di risposta Il tempo di risposta non è da confondere con la costante di tempo T, la quale dipende dal sistema in analisi (es.: la costante di tempo di un circuito RC è indicato come il tempo necessario per caricare il condensatore, attraverso il resistore, al 63,2 %).
Tempo di risposta VS costante di tempo Differenza tra tempo di risposta e costante di tempo. Esempio del circuito RC: la definizione della costante di tempo è matematica e deriva dalla soluzione dell’equazione differenziale che descrive l’andamento della tensione nel circuito. = + − = 0 1 − RC = è pari, matematicamente, al tempo che impiega il condensatore C a raggiungere il 63.2 % della carica massima. 0
Tempo di risposta Tempo di risposta: tempo necessario al sistema per raggiungere un nuovo stato di equilibrio. Il concetto è dunque dipendente dalla specifica applicazione ed è in gran parte frutto di convenzioni. Nel caso di un sensore di pressione, il tempo di risposta viene generalmente definito come l’intervallo richiesto al segnale di uscita di un sensore di pressione per rilevare una variazione della pressione applicata. Le specifiche contenute comunemente nelle schede tecniche riportano informazioni ulteriori relative alle condizioni di prova, come T90 o 10 … 90%. Questa informazione definisce l’intervallo nel quale la variazione a gradino della pressione dal 10 al 90% del fondo scala (es. da 60 a 540 bar per un sensore da 600 bar) conduce a una variazione definita del segnale d’uscita dal 10 al 90% (es. da 1 a 9 V con un segnale 0 … 10 V).
Puoi anche leggere